基于模糊PD控制的柔性航天器振動抑制研究
2022-04-19 00:45:26支敬德戈新生
計算機仿真 2022年3期
支敬德,戈新生
(1. 北京信息科技大學自動化學院,北京 100192;2. 北京信息科技大學機電工程學院,北京,100192)
1 引言
近年來,隨著航天科學技術的不斷發展,航天任務變得比以往更加復雜,對航天器的要求也逐漸提高,因此目前航天器系統大都帶有柔性附件。考慮到航天器運載能力的限制,柔性附件通常選擇質量輕、有一定柔性的結構,因此在航天器完成諸如機動、轉向和空中對接等動作時,在姿態控制過程中執行機構輸出的控制力會很容易激起柔性結構的振動,激發柔性附件的各階模態,導致航天器的姿態失穩。因此,單純的姿態控制已經不能滿足高精度任務的需求,如何設計一種既能完成航天器姿態機動任務又能抑制柔性附件振動的控制律就顯得至關重要。
在工程實際中,比例微分(Proportion Derivative, PD)控制,是一種應用十分廣泛的控制方法。PD控制器簡單易懂,使用中不需精確的系統模型等先決條件,正是這種特性使得PD控制方法在航天器姿態控制領域得到了廣泛的應用。段柳成等[1]針對太陽翼的展開過程進行了研究和推導,并與ADAMS軟件進行了對比,驗證了其正確性,在控制方法中設計了一種基于位形本體信息反饋的PD控制方法,有效抑制了太陽翼展開過程中由關節摩擦引起的航天器位形漂移。Hua Liu等[2]研究了撓性航天器姿態控制問題,提出了一種基于擾動觀測器的彈性振動前饋補償控制方法,設計了由DOBC和PD控制相結合的復合控制器,有效減小了擾動,提高魯棒動態性能。劉新建等[3]提出了一種PDA控制方法,即在PD方法基礎上引入了航天器的剛性姿態加速度反饋,能夠快速抑制低頻大撓性系統中帆板的振動。殷春武等[4]針對太陽帆板展開過程中航天器姿態跟蹤控制時系統以及外部干擾的不確定性問題,設計了姿態跟蹤自適應動態比例微分(PD)控制器,能夠實現航天器姿態機動,具有良好的魯棒性。鐘麗[5]改進了傳統的剛體航天器定常PD+姿態控制律,將其和模糊控制,自適應控制,滑模變結構控制相結合,設計了全局滑模姿態控制律,增強了系統的魯棒性。胡敏等[6]構建了一種剛體航天器姿態控制半實物仿真系統,在系統的數據通訊中采用了自組織網絡,提高了航天器的靈活性,設計了比例微分控制器對航天器姿態機動進行控制。靳立強等[7]針對電動輪汽車動力學控制系統提出了一種最優PD控制方法,用最優控制對PD控制器增益進行整定,提高了系統的穩定性。宋鋒[8]對PID自整定技術進行了研究,提出了一種優化的BP神經網絡的PID自整定控制算法。張恒浩等[9]針對在撓性航天器系統中采用滑模變結構控制時控制力矩的抖振問題,將滑模變結構控制與模糊控制相結合,提出一種模糊滑模控制算法,消除了航天器姿態機動控制力矩的高頻抖振問題。劉福才等[10]針對撓性航天器姿態機動過程中撓性結構的振動問題,提出一種模糊自抗擾控制方法,采用模糊算法對自抗擾控制器的參數進行整定,有效抑制了撓性航天器姿態機動時的振動。朱慶華等[11]針對滑模變結構控制器中存在的抖振問題進行改進,設計了一種動態滑模控制律,實現了對系統抖振的抑制,具有良好的控制性能。鄭彥琴、戈新生[12]研究了欠驅動剛體航天器的姿態穩定性問題,對欠驅動剛體航天器進行運動學和動力學建模,設計了一種基于退步控制方法設計輔助變量的控制律,并與時不變控制律進行比較,證明了時變控制律的有效性。本文采用非約束模態法對柔性航天器構建適合控制器設計的狀態空間模型,針對施加在柔性航天器上的PD控制所存在的姿態機動初始階段控制力矩和姿態角速度過大所引起的柔性附件振動問題,在原有的PD控制基礎上進行改進,引入了模糊控制,設計了一種模糊PD控制律。
2 柔性航天器模型
柔性航天器系統由主剛體帶單側太陽帆板組成,假設該系統由半徑為b的中心剛體和長度為l均勻懸臂梁式柔性附件構成,系統的姿態運動方程和柔性附件振動方程為[13]
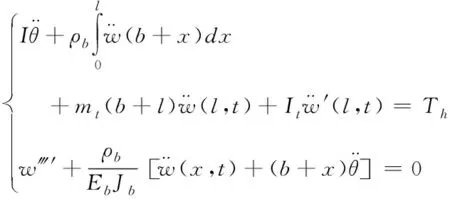
(1)
其中:I為系統總的轉動慣量,Th為驅動力矩,ρb為梁的線密度,w(x,t)為梁上任意點x∈[0,l]相對坐標系的變形,mt為尖端質量的質量,It為尖端質量的轉動慣量,EbJb為梁的抗彎剛度,θ為航天器的姿態角,“·”表示變量對時間t的導數,“′”表示變量對x的偏導數。
柔性結構離散化的主要方法有約束模態和非約束模態兩種。約束模態定義為中心剛體固定,柔性附件無阻尼自由振動,在這種情況下體現的是柔性附件的固有特性;非約束模態定義為中心剛體不固定,柔性附件無阻尼自由振動,并且整個系統(中心剛體和柔性附件)都允許振動,在這種情況下體現的是航天器動力學系統頻率特性。本文采用非約束模態方法將柔性結構離散化。由非約束模態的定義,將系統姿態運動方程和柔性附件振動方程寫為

(2)
式中下標“u”表示非約束模態。
將非約束模態的解表示為僅依賴于空間變量的函數φ(x)和僅依賴于時間變量的函數η(t)的乘積,并將下標“u”省略,則有
w(x,t)=φ(x)η(t)
(3)
其中,φ(x)為柔性梁的第i階振型函數。而由于模態是一個多值解,而線性方程式又符合疊加原理,所以式(3)的解為

(4)
將柔性振動位移w(x,t)表示為振型函數φi(x)與模態坐標ηi(t)乘積的無窮級數和的形式,令

(5)
其中,Θ(t)是一個新引進的變量,其物理意義為假設柔性附件為剛體時衛星的姿態角,其引入目的是使變量變換后新變量數目和原變量相等。
將式(5)代入式(1),將代入后的第二式兩側同乘φi(x)dx后對x自0到l積分,并應用模態正交性條件[13],有

(6)
其中,η為柔性附件的振動模態坐標,ω為柔性結構的振動頻率,f為柔性結構的耦合系數,且有fi=ti/I。
因此,采用非約束模態級數方法離散化得到的解耦后的航天器系統姿態運動方程和柔性附件振動方程可簡化為
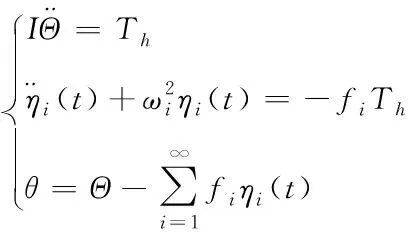
(7)
3 控制器設計
3.1 PD控制器設計
根據柔性航天器姿態角誤差和誤差變化率設計控制律為

(8)
其中:θd為系統期望姿態角,kp和kd分別為PD控制的比例系數和微分系數。考慮到比例系數kp和微分系數kd在取不同數值時對于系統的調節時間影響很大,而調節時間過長,會影響柔性航天器的控制性能,所以必須在保證穩態誤差精度的情況下盡量減小調節時間,使得系統的控制性能達到最佳。因此本文研究了比例系數和微分系數不同時對柔性航天器系統的影響。
3.2 模糊PD控制器設計
考慮到當給柔性航天器系統施加PD控制時,在保證穩態精度的情況下,航天器的初始時刻角速度過大,這會導致航天器的姿態失穩,而這主要是比例系數kp和微分系數kd是常數所引起的問題。因為kp越大,系統調節時間越短,但初始時刻角速度越大,kp越小,初始時刻角速度越小,但系統調節時間越長;而kd越小,調節時間越短,但初始時刻角速度越大,kd越大,初始時刻角速度越小,但系統調節時間越長。針對上述問題,在控制律設計中引入模糊控制,對比例系數和微分系數進行改進,使得航天器姿態機動的初始階段kp較小,kd較大,隨著時間的變化,kp逐漸增大,kd逐漸減小,使得系統更快達到穩定狀態。引入模糊控制之后,雖然增大了調節時間,但大大減小了初始時刻航天器的角速度,使得系統更加平穩,保證了航天器的姿態穩定。
令姿態角誤差為Δθ,則Δθ=θd-θ,根據2.1節中的PD控制律和系統響應結果,設計以下兩條模糊規則
IfΔθ減小,則kd減小,kp增大
IfΔθ增大,則kd增大,kp減小
由這兩條模糊規則可以設計出模糊控制系統,其中Δθ為輸入,比例系數kd和微分系數kp為輸出。定義系統的輸入/輸出模糊集如下


圖1 模糊控制系統的輸入/輸出隸屬度函數
其中,NB為負大,NM為負中,NS為負小,ZO為零,PS為正小,PM為正中,PB為正大。
設計模糊控制系統的輸入/輸出隸屬度函數如圖1所示。并設計如下七條模糊規則
IfΔθisPBTHENkdisPB,kpisNB
IfΔθisPMTHENkdisPM,kpisNM
IfΔθisPSTHENkdisPS,kpisNS
IfΔθisZOTHENkdisZO,kpisZO
IfΔθisNSTHENkdisNS,kpisPS
IfΔθisNMTHENkdisNM,kpisPM
IfΔθisNBTHENkdisNB,kpisPB
最后,根據當前Δθ的值,得到模糊輸出kd和kp,采用重心法進行去模糊化,得到比例系數和微分系數的精確值d和p,則結合模糊控制所設計的控制律為

(9)
4 數值仿真分析
根據上文所設計的控制律,分別對PD控制和模糊PD控制進行MATALAB仿真,驗證控制方法的有效性。
柔性航天器本體轉動慣量(kg·m2)為[13]
I=26.0378
航天器本體與柔性附件之間的剛柔耦合系數(kg1/2·m)為

柔性附件的振動頻率(rad/s)為

假定初始姿態角為0°,初始姿態角速度為0(°/s),期望姿態角為60°,期望姿態角速度為0(°/s),仿真時間為100s,仿真步長為0.01s。將式(8)和式(9)中所設計的兩種控制律分別施加到柔性航天器動力學方程(7)中,代入給定參數,忽略柔性附件阻尼和擾動,分別對姿態運動方程和柔性附件振動方程進行求解,并用MATLAB數值仿真軟件畫出圖像。PD控制仿真結果如圖2、圖3和圖4所示,改進后的模糊PD控制仿真結果如圖5所示,(a)、(b)、(c)、(d)分別為姿態角、姿態角速度、控制力矩和柔性附件振動模態隨時間t變化的圖像。

圖2 kd=300,kp=75時PD控制仿真結果

圖3 kd=200,kp=75時PD控制仿真結果
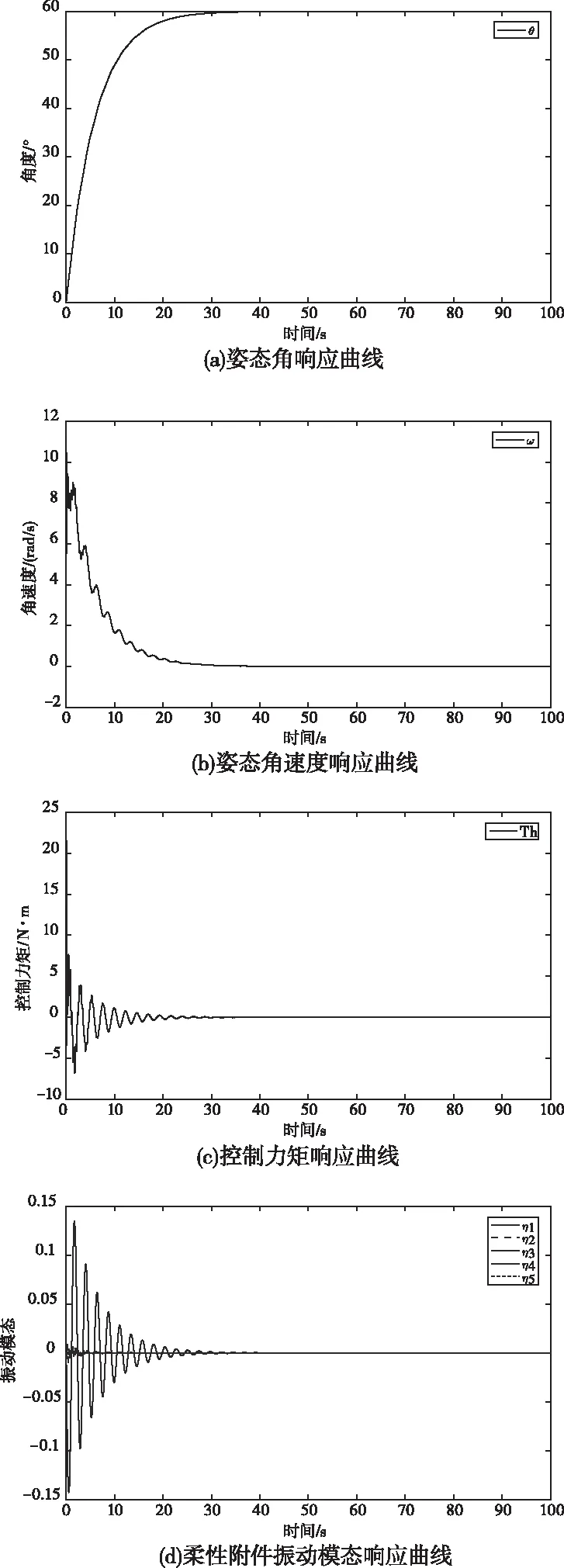
圖4 kd=300,kp=50時PD控制仿真結果

圖5 模糊PD控制仿真結果
對比圖2-圖4可以發現,隨著kp增大或kd減小,航天器姿態能較快收斂到期望角度,調節時間短,但控制力矩、姿態角速度以及柔性附件振動幅值增大;反之kp越小或者kd越大,收斂越慢,調節時間增長,但控制力矩、姿態角速度以及柔性附件振動模態較小。對比圖2和圖5可以發現,加入模糊控制之后,雖然調節時間變長,但能夠大大減小初始階段的控制力矩、姿態角速度以及柔性附件振動模態,能夠使得柔性航天器在姿態機動時更加平穩,而在系統進入相對穩定階段之后,kd接近300,kp接近75,又恢復到了原本的PD控制,并不影響系統的穩定性能。
5 結論
本文對柔性航天器姿態機動問題進行了研究,針對柔性航天器初始階段的姿態機動角速度過大問題,在原有的PD控制基礎上加入了模糊控制。通過對比取不同的比例系數和微分系數值時柔性航天器姿態機動過程,來分析比例系數和微分系數對控制系統的影響。在此基礎上,針對初始階段輸出力矩和姿態角速度過大而容易引起柔性附件振動的情況,在控制律中加入了模糊控制,減小了控制力矩,柔化了控制量,解決了恒增益PD控制初始階段姿態誤差較高時控制力矩和姿態角速度過大的問題。本文通過MATLAB進行仿真,并對不同控制律作用下的響應曲線進行分析,驗證了所提出的控制方法的有效性。仿真結果表明:改進后的控制律不僅能夠實現柔性航天器的姿態機動,還能夠對柔性附件的振動起到良好的抑制作用,提高了系統的控制精度,有效改進了PD控制所存在的問題。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
