果園作業平臺存在的問題及發展對策
2022-04-18 00:58:14秦家輝馬志偉羅自瑤楊淑華郝建軍
農業技術與裝備 2022年2期
關鍵詞:作業
秦家輝,馬志偉,李 玲,羅自瑤,楊淑華,郝建軍
(1.河北農業大學 機電工程學院,河北 保定 071001;2.河北省智慧農業裝備技術創新中心,河北 保定 071001;3.河北農業大學 農村發展學院,河北 保定 071001;4.承德市農業技術推廣站,河北 承德 067000;5.河北省核桃產業技術研究院,河北 臨城 054330)
我國水果種植面積及總產量均居世界首位,2019年我國水果產量達到1.9×108t,果園種植面積達1.23×108hm2,其中超62%的果園位于丘陵山區,果樹種植較為分散且地塊面積較小,果園生產中的修枝剪枝、疏花疏果、套袋采收等高位作業環節多以人工作業為主,勞動強度大、危險系數高、作業效率低[1-2]。近年來,隨著我國果園的規模化發展,亟需實用先進的果園機械。但我國果園機械化作業水平較低,已成為制約我國林果業高質量發展的主要因素[3-4]。
近年來,《農機裝備發展行動方案(2016-2025)》《關于加快推進農業機械化和農機裝備產業轉型升級的指導意見》(國發〔2018〕42號)、《關于加快推進農業機械化轉型升級通知》(農機發〔2019〕4號)等文件相繼出臺,發展現代農機裝備被提高到前所未有的戰略高度,惠及果園機械化發展的相關舉措為我國林果產業的持續高質量發展帶來了生機。在我國果園規模化發展及農業從業人員減少、人工成本增加的背景下,果園機械市場旺盛、需求驟增。果園作業平臺作為輔助人工作業的重要機械裝備,不僅可以節約人工投入成本、提高生產效率、降低生產成本、保障生產安全,而且會大大降低果實損傷率,提高果農的經濟效益,果園作業平臺在現代果園生產中正發揮著越來越重要的作用。
1 果園作業平臺的分類
從結構型式上,果園作業平臺可分為懸掛式、牽引式和自走式3種,見圖1[1,5,6]。懸掛式和牽引式果園作業平臺結構簡單、制造成本低、維護保養方便,但其需要額外配備拖拉機作為動力,轉向不靈活。懸掛式果園作業平臺適用于作業工作量較低的小型傳統果園,牽引式果園作業平臺適用于機耕道和行間距規范的大型現代化果園;自走式果園作業平臺自帶動力,結構緊湊、功能完備、操作簡便,具有較好的靈活性、機動性和適應性,適合不同規模和模式的絕大部分果園使用,但制造成本較高。

圖1 果園作業平臺的分類Fig.1 Classification of orchard operation platform
2 我國果園作業平臺研究現狀
與歐美地區相比,我國的果園作業平臺的研究起步相對較晚,且最初發展緩慢[7]。20世紀90年代,在市場需求帶動下,果樹種植熱情高漲[8],輔助升降作業平臺開始進入市場。1992年浙江金華農機所開發出了專門用于采摘水果的升降機,2007年新疆機械研究所成功研制國內第1臺自走(手扶)履帶式多功能果園作業平臺(LG-1型,如圖2),其主要由行走底盤和升降機構兩大組成,搭載空壓機、發電機及噴霧系統,可完成修剪、噴藥、采摘、運輸等功能[9-10],該機的成功研制開創了我國果園機械的多功能作業時代。隨著傳統果園升級改造及矮砧密植寬行標準化果園的發展,國內掀起了果園多功能作業平臺相關技術及裝備研究高潮[11]。2011年北京市農業機械試驗鑒定推廣站研制出小型多功能遙控動力平臺,該平臺的行進、轉向和停車均可以遠程遙控,遙控范圍可達60 m[7,12];針對于丘陵山區特殊地形環境,2011年中國農業大學研制出一種適用于丘陵山地作業的全地形農業用行走底盤(如圖3),該底盤在崎嶇地形行駛時,可根據實際需求實時靈活調整懸架角度以保持車輪與路面始終緊密結合,從而使車輛具有較好的越障性能與平穩性[12-13];2015年河北農業大學、森海機械公司、河北中農博遠農業裝備有限公司、新疆農科院農機化研究所等單位研制了可左右伸展的果園作業平臺,使作業平臺的作業效率得到提高[14]。
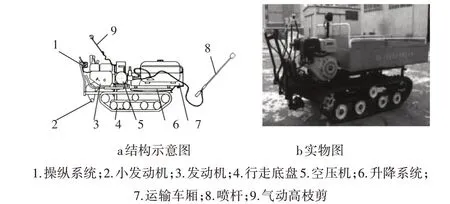
圖2 LG-1型多功能果園作業平臺Fig.2 LG-1 multifunctional orchard operation platform
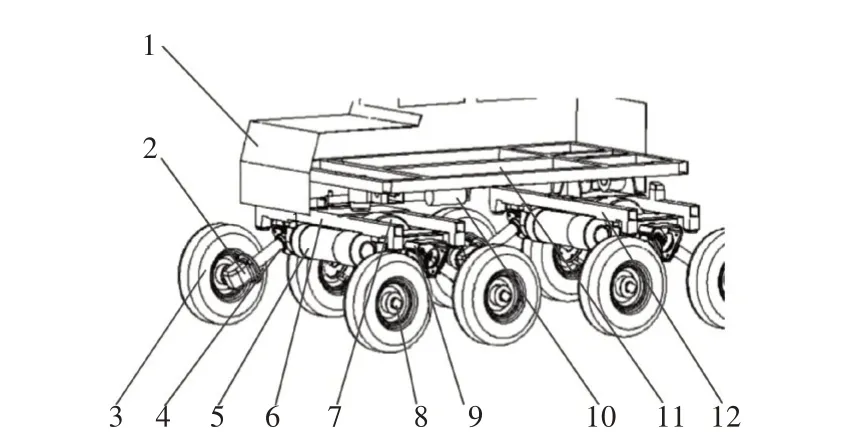
圖3 中國農業大學研制的全地形農用車Fig.3 All terrain agricultural vehicledeveloped by China Agricultural University
3 果園作業平臺存在的問題
作為現代果園生產中不可缺失的重要的農機裝備,果園作業平臺正在發揮著越來越重要的作用。近年來,科研工作者對果園作業平臺,尤其是自走式果園作業平臺開展了大量卓有成效的工作,但仍存在諸多不足,主要表現在以下幾方面:一是我國果園作業平臺大多以傳統農用運輸機具底盤為平臺進行開發,而針對果園環境下特殊作業工況下的專用底盤缺乏,不能很好滿足果園生產對作業平臺通過性、穩定性需求。二是高端果園作業平臺上使用的液壓泵、控制閥、傳感器等零部件產品精度和質量尚不能很好滿足可調平式果園作業平臺的調平精度和響應時間需求。三是果園作業平臺的機電液一體化集成度不夠,氣、電、液動力輸出接口不能很好滿足果園耕整(起壟、鋤草、松土、打穴、旋耕)、果樹管理(修剪、疏花、套袋)、果實收獲(采摘、集果)等作業機具及多工位作業需求。四是果園作業平臺的信息化、數字化、智能化水平較低,自動導航、遠程遙控、物聯網、人工智能、機器視覺、5G等新技術融入度不高。
4 果園作業平臺發展對策
在我國現代化果園面積逐年擴大、用工成本劇增的背景下,果園作業平臺作為有效提高果園生產效率的重要手段和工具,其發展具有重要意義。自走式的功能果園作業平臺是未來發展的主要方向,針對我國果園作業平臺存在的問題,認為應在以下幾方面開展相關工作。一是加強果園作業平臺專用底盤技術和產品研發,拓寬使用場景。開發輪距/軌距可調式系列化、多樣化底盤結構,提高果園作業平臺的通用性,拓展其應用場景。二是開發機電液一體化高度集成的氣、電、液動力輸出接口,方便掛接起壟、鋤草、松土、旋耕、施藥、施肥、修剪、疏花、套袋、采摘等果園作業機械,拓展作業平臺功能,實現一機多用。三是選用高精度傳感器及控制更精準的液壓調節閥等液壓元器件,采用神經網絡、PID等控制算法,不斷優化作業平臺的主動調平能力,提高作業平臺的安全性和操控性。四是加強果園作業平臺電動底盤的能源系統、驅動系統和控制系統及作業平臺電動升降、電動調平等技術研究與開發,使作業平臺具有更好的經濟性和操控性。五是加強機器視覺、物聯網、人工智能、5G等新技術應用,實現作業平臺自主導航、自動路徑規劃、智能避障,提高作業平臺的信息化、數字化、智能化水平。六是完善配套政策,進一步發揮財政補貼資金作用,加大傳統果園升級改造、丘陵山地果園宜機化改造、標準化建園及果園作業平臺購機補貼力度,資助作業平臺整機及其關鍵零部件自主研發,加大相關先進技術及裝備的引進力度,加強科技成果轉化及從業人員技能培訓,扶持發展規模經營。
5 結語
隨著我國傳統果園升級改造及新建標準化果園的快速發展,果園作業平臺,尤其是具有起壟、鋤草、松土、旋耕、施藥、施肥、修剪、疏花、套袋、采摘等功能的果園作業平臺在現代果園生產中發揮著越來越重要的作用。針對我國果園作業平臺存在的不足,加強薄弱環節果園多功能作業平臺技術創新研究和裝備的研發、推廣與應用,解決目前果園作業平臺大多存在的功能單一、可操控性差、自動化水平低等“卡脖子”問題,為現代果園的規模化、產業化及可持續發展提供有力的技術支撐,對推進我國林果業高質高質量發展具有重要的現實意義。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
