非同軸前后輪自平衡車非線性轉彎平衡控制
2022-04-18 10:00:56董慧芬宋金海
計算機仿真 2022年3期
關鍵詞:模型
董慧芬,宋金海
(中國民航大學電子信息與自動化學院,天津 300300)
1 引言
當今機器人快速發展,各式各樣的機器人琳瑯滿目,醫療機器人、服務機器人、仿人機器人、平衡機器人等等[1-3]。目前平衡機器人是國內外的研究熱點,隨著傳感器技術和微控制器技術發展,其中非同軸前后輪機器人因為其簡單結構、成本低廉、能在地勢起伏較大的情況下仍能保持良好的性能,成為了當前平衡機器人的主流[4-5]。由于該機器人是一種具有強耦合、欠驅動的非線性系統[6],關于其動力學建模和提出新的控制方法引起了許多學者的興趣。Ham等人提出了一種簡單的自行車機器人的動力學模型,在此基礎上設計了一個內部平衡控制器[7];密歇根大學的Anouck等制作了非同軸的兩輪小車,利用拉格朗日方程分別建立了單陀螺和雙陀螺動力學模型[8],在平衡點附近進行簡單地線性化,對線性化后的模型進行控制和分析,但是由于其線性化過于粗略,無法實現較大傾角的回正。武漢理工大學的趙燕教授對雙陀螺的非同軸前后輪機器人采用拉格朗日進行動力學建模[9],設計了滑模控制器進行機器人的平衡控制,但是對于該機器人的轉彎動力學模型沒有深入研究;俄亥俄州立大學的Harun Yetkin 等人研發了一種基于陀螺進動效應的自平衡車[10],采用 Lagrange 方程建立自平衡車的動力學模型,設計了一階滑模控制器和 PID 控制器,試驗表明滑模控制器的效果比 PID 控制器效果好,但其采用的單陀螺布局會產生干擾自行車俯仰或者偏航運動的力矩,在自行車轉彎過程時由于單陀螺布局容易導致側傾發生,無法完成轉彎運動。2015年呂寬洲等人設計一款帶有陀螺裝置的無人自行車[11],通過設計平衡控制算法直接作用于陀螺,產生陀螺力矩維持自行車平衡,實現了無人自行車在靜止狀態能自動恢復到豎直狀態,但對于受到撞擊干擾等能否快速恢復到平衡狀態沒有進行深入展開。北京凌云智能科技公司提出了一種基于陀螺效應的兩輪電動車的概念車[12],其通過駕駛者人工控制方向盤和陀螺產生的陀螺力矩來平衡重力矩,維持兩輪汽車在行駛過程保持平衡狀態,沒有進行自平衡的無人自動控制方面的研究。
根據上述國內外對于非同軸前后輪機器人的動力學建模和控制器的研究,主要的側重點都在于車體在直線運動或者靜止時的自平衡控制方面,對于機器人的轉彎動力學建模、一定轉向角下平衡車的姿態控制沒有深入的研究。因此本文在建立平衡車轉彎動力學非線性模型的基礎上,采用反饋線性化方法進行非線性模型的線性化,而不是在平衡點附近的線性化處理,對前后輪平衡車轉彎控制進行研究,減小線性化誤差的影響。
2 非同軸前后輪平衡車轉彎動力學建模
2.1 陀螺平衡原理
本文中非同軸前后輪平衡車采用陀螺作為平衡單元,如圖1所示,陀螺自轉軸為y軸,進動軸為Z軸。陀螺繞著自轉y軸以w0的角速度進行自轉,陀螺相對于y軸轉動慣量是J0,當陀螺繞著Z軸以角速度進動時,根據右手定則陀螺將會產生一個沿著X軸方向的力矩M。
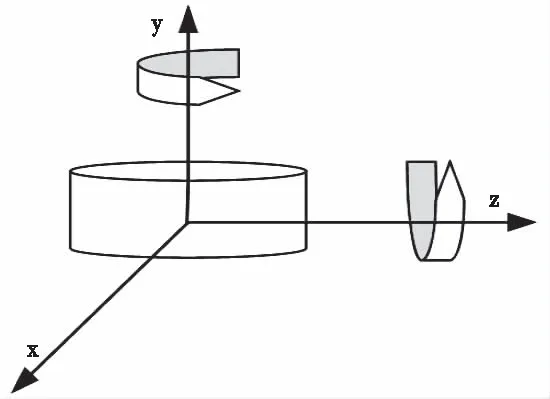
圖1 陀螺力矩產生原理
由于進動角度的產生,陀螺力矩的方向會改變,可以分解為偏航力矩和傾斜平衡力矩,前者是影響平衡車方向的干擾力矩,后者是平衡傾斜姿態的力矩。所以文中采用雙陀螺平衡方案,為了讓偏航力矩抵消、平衡力矩疊加,要求兩個陀螺的自轉方向和進動方向都相反,如圖2。
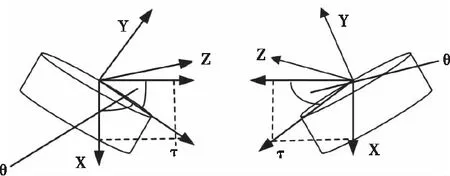
圖2 雙陀螺平衡原理
2.2 自平衡車轉彎原理分析
當平衡車進行轉彎時,會產生一個使平衡車側翻的離心力,通過改變車身的傾斜與車身的速度可使平衡車不產生側傾。利用這一現象,對平衡車一定傾斜角下的轉彎動力學分析,圖3(a)為平衡車后視簡化圖,圖3(b)為車身側傾一個角度進行轉彎運動力學分析,其中,O為平衡車的重心,G為平衡車的重力,FN為地面對平衡車的支撐力,f為前后輪所受的摩擦力,h為平衡車質心離地面的高度。
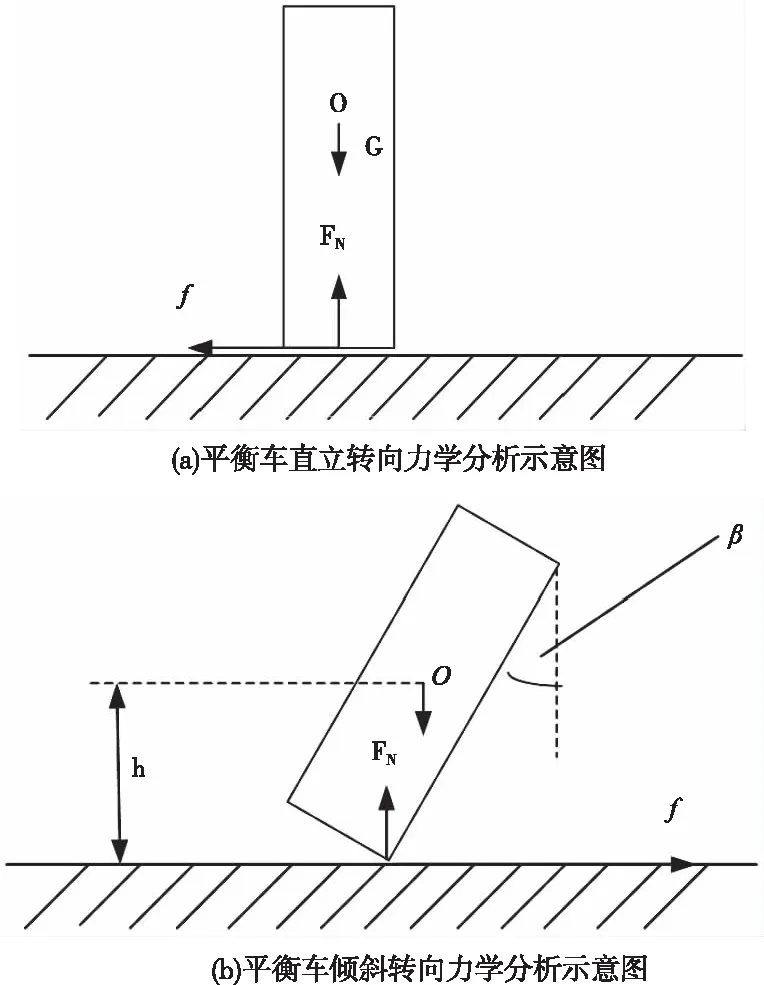
圖3 平衡車轉向力學分析示意圖
由圖3(a)可知,平衡車在向右進行轉向時,受到與轉向方向相反的一個摩擦力f,導致平衡車在轉向時候向左翻轉。圖3(b)是通過平衡車傾斜一定角度β,轉彎所需的向心力由車體傾斜產生的分力提供,車體便不會發生傾倒。所以轉向時的向心力與自平衡車的橫滾角之間存在著耦合關系。如下式(1)
fh=FNhtan(β)
(1)
由式(1)可知
f=Gtan(β)
(2)
平衡車轉彎示意圖如圖4所示,表示平衡車的轉向角,L為平衡車前后輪心間距,O為平衡車的轉彎圓心,R為轉彎半徑,v為平衡車前進線速度,則平衡車轉彎所需要的向心力為F向心力=2mv/R。
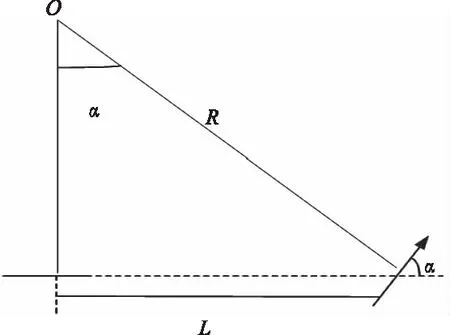
圖4 平衡車轉向俯視圖
假設機器人所提供的最大靜摩擦力等于所需要的向心力,則機器人傾斜角β與轉彎半徑的表達式如式(3)
(3)
根據正弦定理可知
(4)
式(3)與(4)可知平衡車平穩地進行轉彎運動需要對傾斜角與車身的速度進行協調控制,下面將對平衡車轉向動力學進行建模。
2.3 自平衡車的轉彎動力學模型
將前后輪平衡車系統可以看作由三個剛體部分組成:車體、高轉速的陀螺、前后輪。以β表示平衡車的傾斜角,α表示平衡車的轉向角,θ表示陀螺的進動角。如下圖5(a)和圖5(b)所示,車輪的質量為m1且半徑為r1,車體的重量為m2、質心高度為h1,車體沿經過前后輪直線的轉動慣量為Ib。陀螺的質量為m3,質心高度為h2,自轉軸的轉動慣量為Jr,沿著x軸的轉動慣量為Jp。假設平衡車初始線速度為v0,車輪和車體有2個方向的運動,分別是平動和傾斜方向。
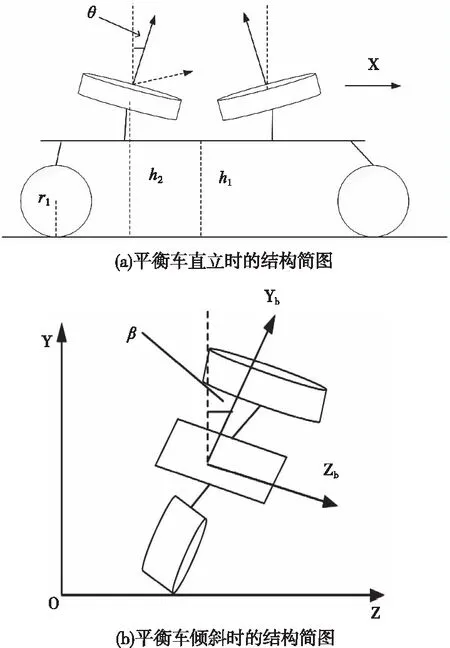
圖5 平衡車結構簡圖
從上述假設和平衡車參數可知平衡車的動能
T=Tb+Tg+Tf+Tw

(5)
不考慮其它不確定的外部干擾,系統的所受廣義力中重力為有勢力,則系統的勢能為
V=2m1gr1cosθ+m2gh1cosθ+2m3gh2cosθ
(6)
對于廣義坐標β,受到的非有勢廣義力矩為

(7)
其中α為平衡車的轉角,Wd為后輪驅動電機的功,L是前后輪著地點的間距。
對于廣義坐標θ,受到的非有勢廣義力矩為

(8)
其中Tt為進動電機的力矩。
對于廣義坐標α,受到的非有勢廣義力矩為

(9)
其中Twh為轉向電機的力矩,μ轉向架與車體的摩擦系數。
選取平衡車的傾斜運動陀螺進動兩個自由度為系統的廣義坐標,對于廣義坐標β通過拉格朗日方程可以的到
+2sinθcosθ(Ip-Ir)-g(m2h1+m3h2)sinβ=

(10)
對于廣義坐標θ通過拉格朗日方程可得

(11)
對于廣義坐標α通過拉格朗日方程可得

(12)
設
u1=wd,u2=Tt,u3=Twh
由上式(10)-(12)可得平衡車的非線性轉彎動力學模型如式(13)所示
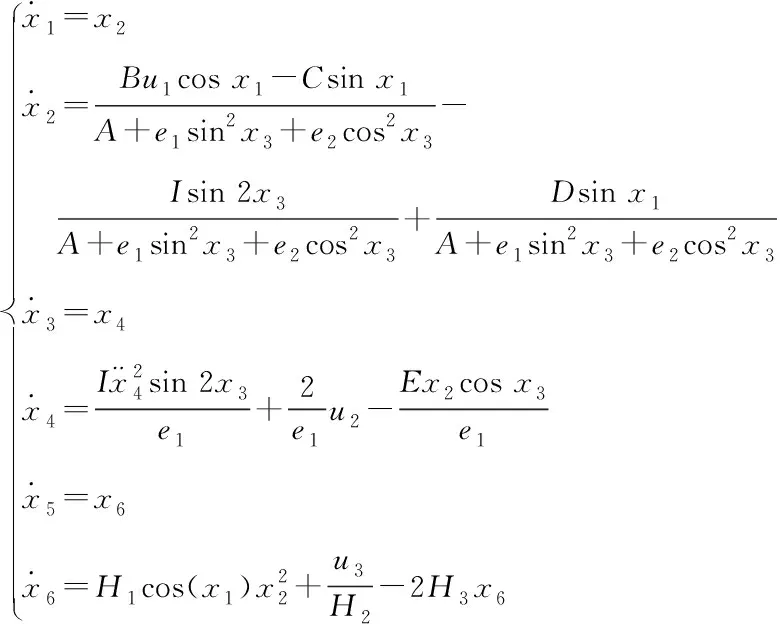
(13)
其中
C=(2m1r+m2h)g,D=g(m2h1+m3h2),E=2Ipw
I=Ip-Ir,e1=Ip,e2=Ir,
3 自平衡車轉彎非線性動力學模型反饋線性化
將平衡車的轉彎動力學模型式(11)轉化為矩陣形式,可以得到下面MIMO非線性模型
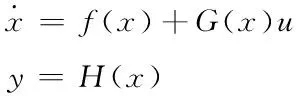
(14)
其中,x∈R6,u∈R3,y∈R3,f(x)為6維的光滑的向量場,G(x)是6*3的矩陣,具體如下公式
H(x)=[h(x1),h(x2),h3(x3)]
x=[x1,x2,x3,x4,x5,x6],y=[y1,y2,y3]
G(x)=[g1(x),g2(x),g3(x),g4(x),g5(x),g6(x)]
u=[u1,u2,u3]T
可以得到如下的矩陣
該矩陣在平衡點x0=(0,x2,0,x4,0,x6)T的鄰域非奇異,所以系統在此鄰域總相對階為6階,則有
其中v=[v1,v2]為新輸入向量。由A-1(x)存在可得
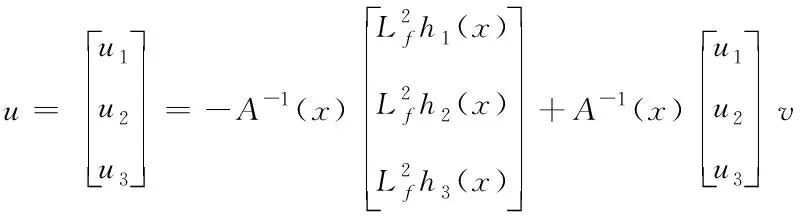
(15)
通過狀態反饋控制率得到非線性系統的線性化和對于新輸入的解耦,在結合控制率對上述的等效線性系統進行研究。平衡車的線性化控制結構框圖如圖6所示。
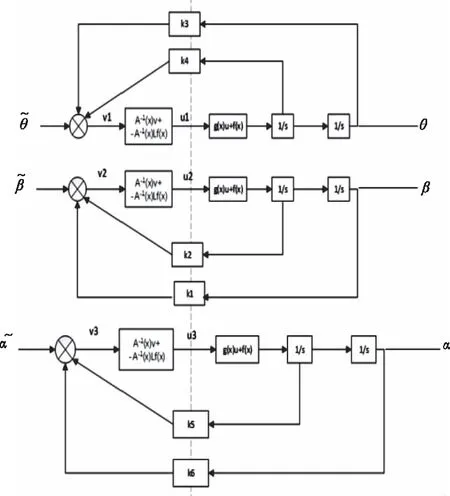
圖6 轉彎非線性動力學模型線性化控制結構框圖
4 基于反饋線性化轉彎平衡控制仿真及結果分析
對于前后輪自平衡車,應用經過反饋線性化后的轉彎動力學模型,設計PID控制器,可使小車的傾斜角快速穩定到達給定值。基于Matlab中Simulink搭建如圖6所示仿真模型,根據實驗平臺準確估計獲取小車模型參數如表1。
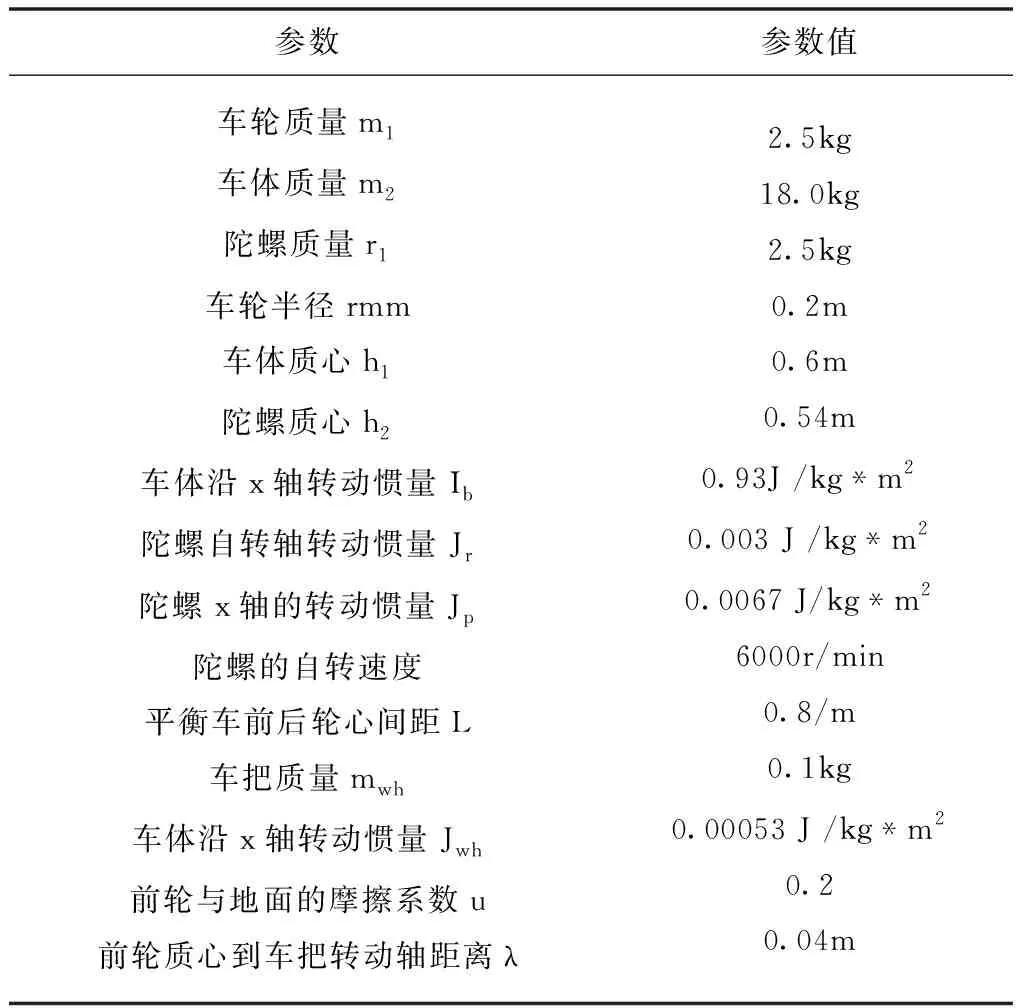
表1 平衡車參數
根據前面的公式計算得到A、B、C、D、E、I、e1、e2的值(其中g=9.8m/s2),搭建Simulink模型進行仿真驗證。下面實驗分析圖中虛線均為車身的傾斜角,實線為給定傾斜角的輸入。
4.1 未使用反饋線性化解耦控制仿真結果分析
仿真中,為了探究在轉向過程中平衡問題,在模型未進行反饋線性化的前提下使用PID控制器進行轉彎控制,給定輸入車速為1m/s,外部干擾力為0,在運動2s后給定轉向角度為30°,根據式(3),需要車身傾斜角保持在6°。
如圖7所示,虛線為期望的轉向角,實線為實際轉向角。在平衡車運動過程中,在0s時輸入一個幅值為30°的單位階躍信號作為轉向角度的輸入,由圖可知實際的轉向角無法達到預期要求。
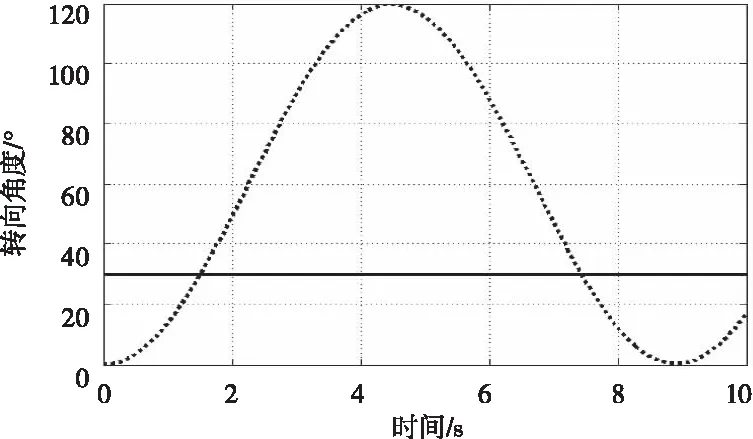
圖7 普通pid控制器下α的響應
如圖8所示,由陀螺的進動原理可知,由于陀螺的進動角一直在變化結果導致平衡車的傾斜角隨之改變。
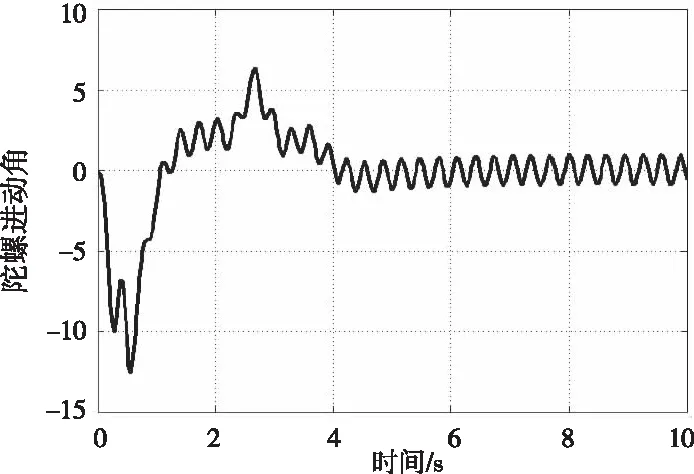
圖8 普通pid控制器下θ的響應
如圖9所示,平衡車不斷地在-5°到-20°之間晃動,無法達到預期的6°。在實際中意味著平衡車無法在轉彎時保持自身的平衡,無法完成轉向過程。
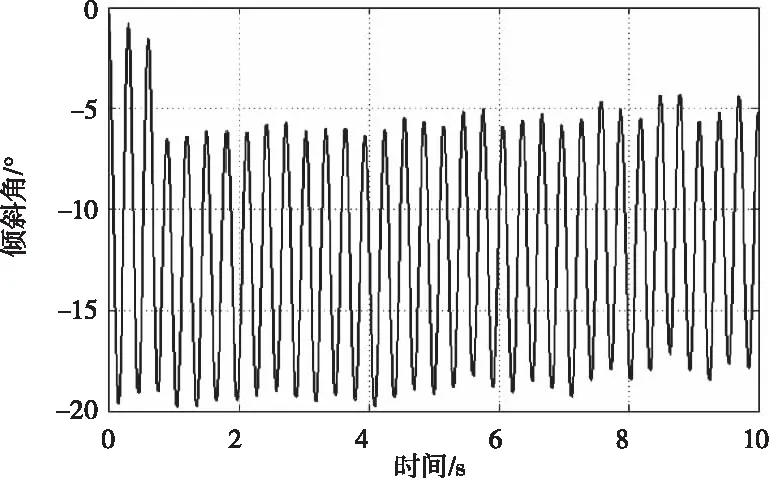
圖9 普通pid控制器下的β的響應
4.2 使用反饋線性化轉彎控制仿真結果分析
將非線性的轉彎系統進行反饋線性化后,加入PID控制器保持車身速度1m/s,在0s時輸入一個幅值為30°的單位階躍信號作為轉向角度的輸入。
如圖10所示,平衡車在1s內轉向角度達到預期的30°,超調量為0。
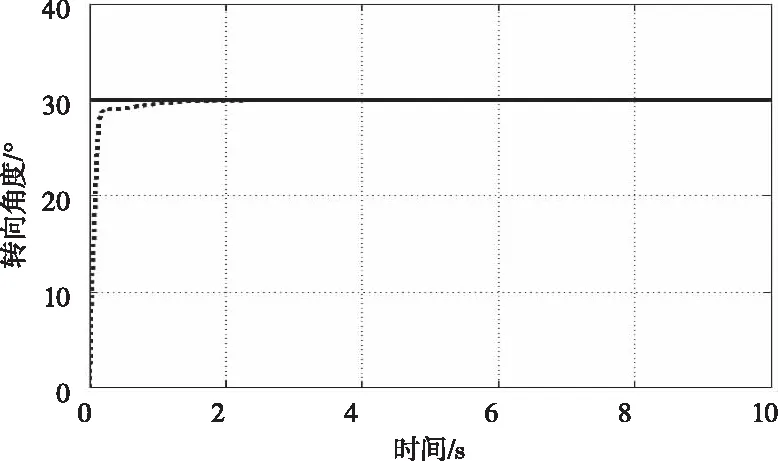
圖10 使用反饋線性化解耦控制的α的響應
根據上面的式(3),車身的傾斜角度需要到達6°,在下圖11中在2s內達到預期傾斜角度,與上式(3)一致。
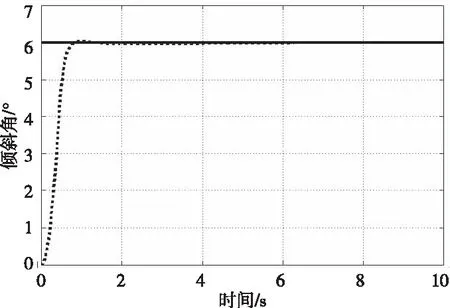
圖11 使用反饋線性化解耦控制的β的響應
圖12中陀螺的進動角在在0-2s時,產生進動效應對車身的傾斜角進行改變,在2-3s時,由于車身達到預期的傾斜角度,進動角的變化趨于0并且回復初始位置。
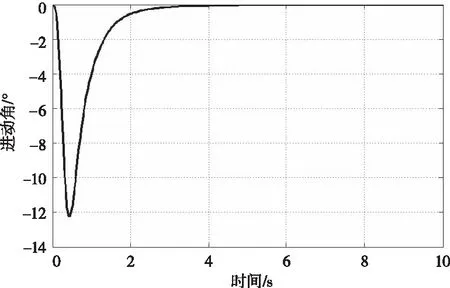
圖12 使用反饋線性化解耦控制的θ的響應
4.3 抗干擾仿真結果分析
在保持一定傾斜角穩定轉彎運行時,為了模擬受到碰撞等瞬時外部干擾,如下圖13所示,在5s時刻加入一個大小為100N,持續時間為0.1s的干擾力。
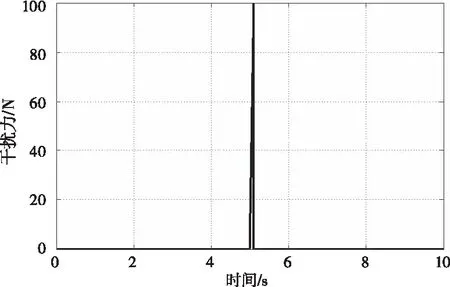
圖13 外部干擾力
仿真結果如圖14所示,在受到外力干擾下,平衡車的轉彎平衡狀態受到打破,傾斜角度由穩態的6°變為最大值7.6°,經過3.9s回復到原來穩態值6°。由圖15可知,陀螺的進動角發生變化,最大值為2.4°,產生進動力矩使平衡車在3.6s內回復平衡狀態,進動角穩態誤差為0,由此可知在一定干擾下平衡車能快速回復,保持自身的平衡穩定。
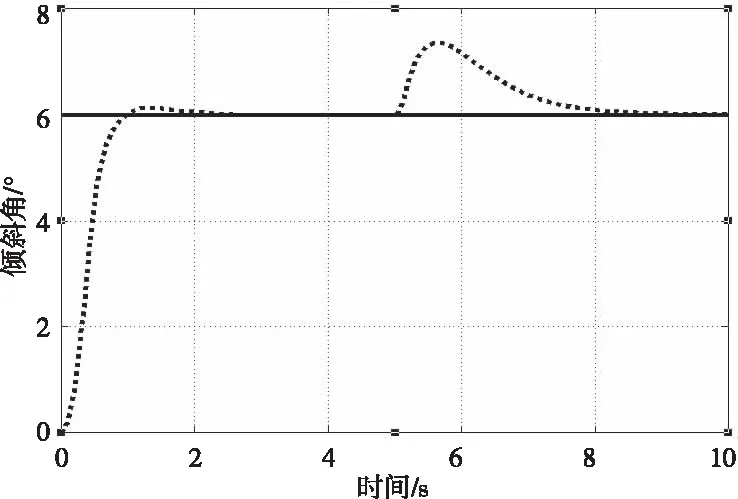
圖14 干擾仿真傾斜角變化曲線
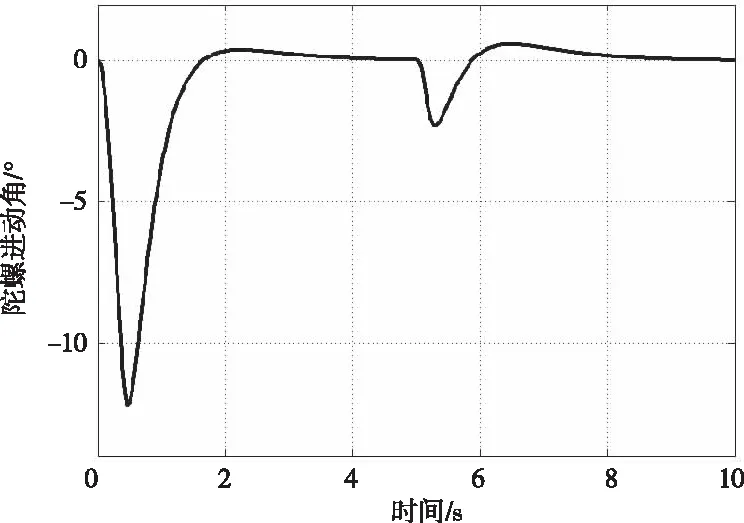
圖15 干擾仿真進動角θ變化曲線
5 結論
本文以自平衡車車體左右傾斜角、陀螺進動角和轉向角為廣義坐標,利用拉格朗日法建立平衡車轉向的MIMO仿射非線性動力學模型;提出一種基于非線性動力學模型的轉彎平衡控制方法。仿真分析結果可知,采用基于反饋精確線性化理論設計的控制器,可以實現雙陀螺平衡車的轉彎平衡控制。在轉向角30°和速度為1m/s的情況下,該平衡車可以在保持一定傾角情況下,完成轉向運動以及在受到外界瞬時100N干擾力下保持轉彎平衡穩定,驗證了所建立的平衡車的轉彎動力學模型的正確性。與一般的近似線性化方法對比,在使用多輸入多輸出系統的輸出反饋線性化算法設計控制算法,不需要做出其它線性近似處理,取得了更好的效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
