基于過程仿真的密集陣目標(biāo)攔截效能研究
2022-04-18 10:00:22尹晉
計(jì)算機(jī)仿真 2022年3期
尹 晉
(91404部隊(duì),河北秦 皇島 066001)
1 引言
密集陣是一種近程防御武器系統(tǒng),是一種全自動快速反應(yīng)、密集發(fā)射的近程防空反導(dǎo)火炮,在艦艇和要地防御中得到廣泛應(yīng)用。密集陣系統(tǒng)由搜索雷達(dá)、跟蹤雷達(dá)、火炮三位一體的形式組成,能以全自動的方式進(jìn)行目標(biāo)搜索、發(fā)現(xiàn)、威脅估計(jì)和指示、威脅捕獲和確認(rèn)、開火、閉環(huán)瞄準(zhǔn)、摧毀目標(biāo)、殺傷評定。其原理框圖如圖1所示。

圖1 密集防空火炮命中分析要素結(jié)構(gòu)圖
密集陣系統(tǒng)目標(biāo)攔截性能主要包括跟蹤雷達(dá)的目標(biāo)距離與方向探測精度、目標(biāo)運(yùn)動預(yù)報信息處理、火炮隨動速度和精度、發(fā)射速率、炮彈初速與空氣阻力系數(shù)等。對于目標(biāo)不同的速度、尺寸大小、突防機(jī)動樣式,在目標(biāo)不同距離和高度上的單位時間內(nèi)命中枚數(shù),都具有不同的效能體現(xiàn)。對密集陣作戰(zhàn)效能的研究有理論分析和試驗(yàn)兩種方法。
在密集陣系統(tǒng)目標(biāo)攔截的理論研究方面,國內(nèi)學(xué)者進(jìn)行了許多工作。文獻(xiàn)[1]基于VR-Force仿真軟件和概率模型,對不同入射角導(dǎo)彈的攔截效率進(jìn)行了研究;文獻(xiàn)[2]基于Sim000仿真軟件和建立的雷達(dá)跟蹤與濾波模型、開火時機(jī)決策模型、作戰(zhàn)流程Euler網(wǎng)模型,對導(dǎo)彈突防概率進(jìn)行了研究。目前國內(nèi)研究基本上都是針對直線運(yùn)動的導(dǎo)彈目標(biāo),未充分考慮火炮隨動控制和彈道性能特點(diǎn)[3]。
本論文研究將針對目標(biāo)不同的突防機(jī)動樣式,結(jié)合攔截炮彈彈道和火炮隨動系統(tǒng)的建模,通過仿真實(shí)驗(yàn),試圖得出對不同機(jī)動樣式、尺寸大小的目標(biāo),在距離、高度上的單位時間內(nèi)命中枚數(shù)的分布。
2 目標(biāo)突防機(jī)動與雷達(dá)跟蹤
目標(biāo)突防機(jī)動考慮三種典型的情況:直線機(jī)動、水平面圓周機(jī)動、水平面和垂直面蛇形機(jī)動。直線機(jī)動時目標(biāo)以定速、定向、定高運(yùn)動,如導(dǎo)彈制導(dǎo)開機(jī)前的運(yùn)動;水平面圓周機(jī)動時目標(biāo)以固定的角速度作轉(zhuǎn)向、定高運(yùn)動;水平面和垂直面蛇形機(jī)動時目標(biāo)以正弦規(guī)律變化的水平和垂直角速度在空間進(jìn)行蛇形曲折運(yùn)動。
通過雷達(dá)跟蹤實(shí)時獲取得到目標(biāo)距離、方位、俯仰角信息。雷達(dá)跟蹤的目標(biāo)是預(yù)報目標(biāo)的運(yùn)動,為火炮隨動提前瞄準(zhǔn)提供依據(jù),消除炮彈彈道運(yùn)動耗時的影響[3]。目標(biāo)運(yùn)動預(yù)報的研究比較廣泛深入[4]-6],涉及雷達(dá)回波頻域分析、運(yùn)動特性分析、卡爾曼濾波等方法。針對本文研究中目標(biāo)速度微變但機(jī)動多變的特點(diǎn),采用目標(biāo)運(yùn)動回歸分析方法。
雷達(dá)探測跟蹤中目標(biāo)方位、仰角、距離在真實(shí)數(shù)據(jù)基礎(chǔ)上加入隨機(jī)誤差,得到當(dāng)前時間前一段時間內(nèi)目標(biāo)的信息{ti,di,αi,βi|i=0,1,2,…,n-1},其中t、d、α、β分別是時間、距離、方位角、俯仰角,按下式計(jì)算得到時序上的目標(biāo)坐標(biāo)
(1)
對{ti,Xi,Yi,Zi|i=0,1,2,…,n-1}中的三個坐標(biāo)數(shù)值分別進(jìn)行時間擬合,得到坐標(biāo)隨時間變化的解析表達(dá)。采用時間的2次函數(shù)進(jìn)行擬合,以X坐標(biāo)為例,n組數(shù)據(jù)(ti,Xi)(i=0,1,…,n-1)進(jìn)行擬合后得到3個參數(shù)ak(k=0,1,2)表示的擬合曲線
(2)
為確定擬合參數(shù),定義擬合誤差為
當(dāng)e最小時
即
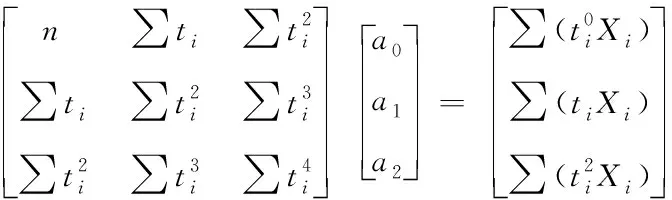
(3)
由此可求得3個擬合參數(shù)ak(k=0,1,2)。
圖2是基于數(shù)據(jù)擬合的目標(biāo)軌跡預(yù)報仿真效果圖,上下部分分別是2秒內(nèi)目標(biāo)運(yùn)動軌跡的正視圖和俯視圖。在1秒時進(jìn)行目標(biāo)航跡的預(yù)報,圓點(diǎn)是根據(jù)雷達(dá)根據(jù)1s內(nèi)探測的目標(biāo)位置擬合得到的目標(biāo)航跡。
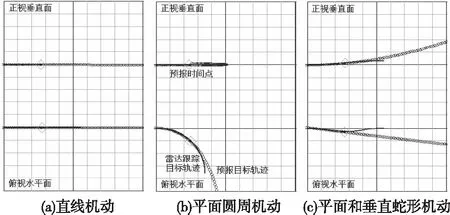
圖2 目標(biāo)不同機(jī)動下運(yùn)動軌跡預(yù)報仿真效果
3 火炮彈道
根據(jù)火炮彈道學(xué)理論[7],炮彈從火炮出膛后,彈道的初始條件是出膛的初速度和方向,然后在重力和空氣阻力作用下,產(chǎn)生彎曲的彈道。記出膛速度為V0,炮膛方位角α、俯仰角β,炮膛水平角速度ωα、垂直角速度ωβ,炮管長度L。則炮彈初始位置坐標(biāo)為
(4)
位置坐標(biāo)對時間求導(dǎo),得出炮管末段轉(zhuǎn)動的線速度
在此基礎(chǔ)上,疊加炮膛靜止時的炮彈出膛速度,得到炮彈初始速度為:

(5)
炮彈所受空氣阻力與其速度的平方成正比,動力學(xué)、運(yùn)動學(xué)模型分別為:
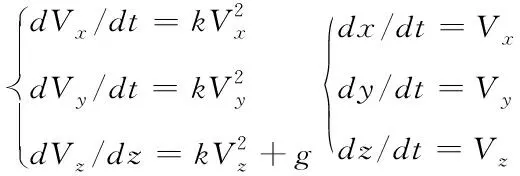
(6)
圖3是采用以上模型計(jì)算得到的炮彈垂直面的彈道軌跡,發(fā)射仰角為5°~60°,間隔5°,軌跡上小圓點(diǎn)為間隔0.5秒的位置。圖4是計(jì)算得到的不同發(fā)射仰角下炮彈速度隨時間的變化曲線族。從彈道可見,密集陣攔截攻擊是一種典型的提前角攻擊。
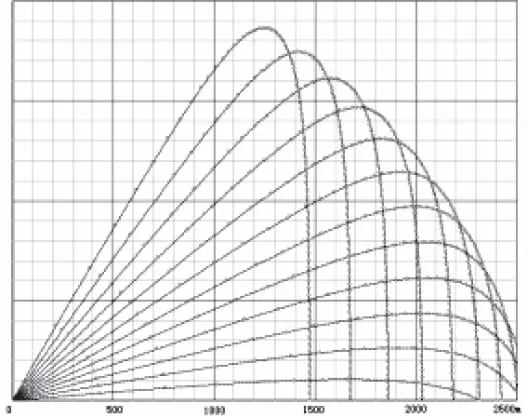
圖3 炮彈垂直面彈道模型計(jì)算結(jié)果
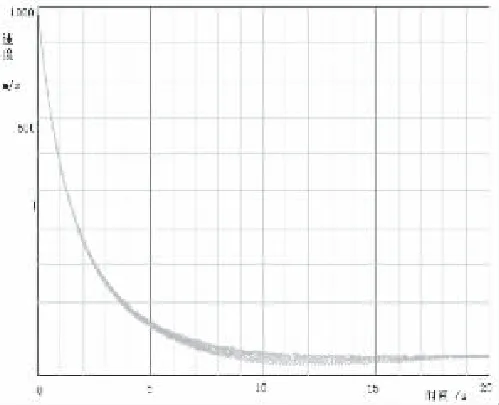
圖4 炮彈速度變化計(jì)算曲線
4 火炮伺服隨動控制
火炮伺服隨動是根據(jù)連續(xù)高速射擊的方位角和俯仰角要求,實(shí)時、動態(tài)、連續(xù)地控制,使在規(guī)定的炮彈出膛時間到達(dá)期望的方位角和俯仰角。炮彈出膛時間以射擊速度為恒定間隔,如10,000發(fā)/分鐘的射擊速率下,這一間隔為6ms。
根據(jù)密集陣近程防御武器系統(tǒng)的閉環(huán)火控原理[8],研究中采用二階系統(tǒng)進(jìn)行等效模擬,參照某型火炮隨動系統(tǒng)的分析[9],建立火炮隨動控制模型。
火炮控制模型考慮轉(zhuǎn)動慣量和阻力矩影響,阻力矩與角速度成正比,有:
水平方位角控制模型

(7)
垂直俯仰角控制模型
(8)
其中,J1(β)為隨俯仰角β變化的水平方向轉(zhuǎn)動慣量,J2為垂直方向轉(zhuǎn)動慣量,U1(t)和U2(t)分別是水平和垂直方向的控制力矩,c1和c2分別是水平和垂直方向的阻力矩系數(shù)。以水平方向控制為例,上式變換為
其中,K1=1/c1,T1=J1/c1。在控制量U1固定的情況下,得到方位角及其角速度隨時間的變化為

(9)
由上式可知,t>>T1后穩(wěn)定的轉(zhuǎn)動角速度為K1U1,是由控制力矩和阻力矩系數(shù)確定的;T1是慣性產(chǎn)生的時間小于,T1越大系統(tǒng)響應(yīng)越快。
圖5是火炮伺服隨動角度的仿真效果,其中小圓圈表示射擊間隔處期望的角度,曲線是控制下角度隨時間的變化。
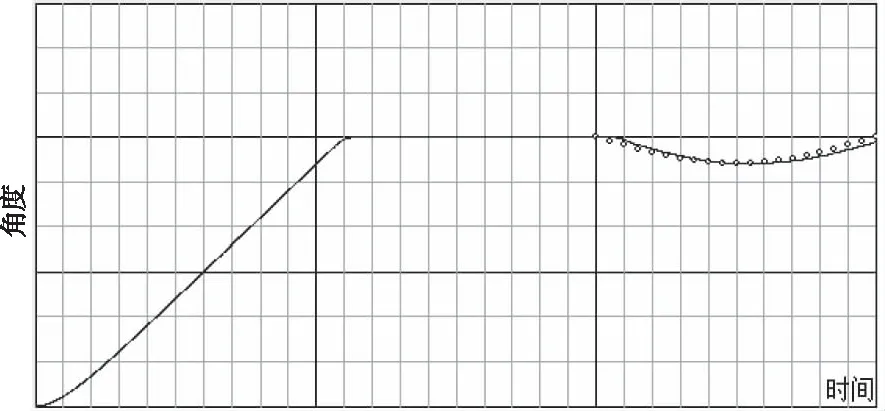
圖5 火炮伺服隨動角度仿真效果
5 構(gòu)建仿真軟件
根據(jù)密集陣連續(xù)快速射擊過程原理,在雷達(dá)對突防機(jī)動目標(biāo)的跟蹤和運(yùn)動軌跡預(yù)報基礎(chǔ)上,需要以密集陣射擊間隔為周期、以炮彈垂直面彈道為依據(jù),確定炮彈與目標(biāo)相遇的射擊時間、仰角、方位角,產(chǎn)生射擊隊(duì)列控制數(shù)據(jù);周期性地控制密集陣火炮進(jìn)行兩個方向的角度調(diào)整,滿足射擊隊(duì)列控制數(shù)據(jù)中時間、仰角、方位角的要求;計(jì)算每個周期中各炮彈和目標(biāo)的最小距離,進(jìn)行命中判斷分析。最終通過多次攔截過程的仿真,統(tǒng)計(jì)得出目標(biāo)在距離、高度范圍內(nèi)的單位時間炮彈命中枚數(shù)。
仿真軟件流程如圖6所示。

圖6 密集陣攔截效能分析的過程仿真流程
5.1 仰角彈道數(shù)據(jù)集
采用攔截炮彈彈道模型,預(yù)先計(jì)算炮彈垂直面內(nèi)不同射擊仰角下離散時間的彈道數(shù)據(jù),存入彈道數(shù)據(jù)集。為射擊要素計(jì)算提供依據(jù),提高射擊要素計(jì)算的效率。
仰角彈道數(shù)據(jù)集格式為
Ddd={Avi: {Tij,Dij,Hij|j=1,2,…,mi} |i=1,2,…,n}
其中,Avi為n個從小到大排序的發(fā)射仰角,Tij、Dij、Hij為發(fā)射仰角Avi彈道中mi個時刻、導(dǎo)彈水平距離、高度數(shù)據(jù)。
發(fā)射仰角采用間隔為1°,彈道時間間隔△t根據(jù)密集陣射擊速率確定,10000發(fā)/分鐘時△t=0.006秒。
5.2 射擊要素計(jì)算
根據(jù)目標(biāo)預(yù)報軌跡預(yù)報的擬合公式,得到預(yù)報軌跡的數(shù)據(jù):
TAR={Pk(tk,TXk,TYk,TZk)|k=1,2,…,m)}
時間起點(diǎn)取當(dāng)前時刻為0,采用下式計(jì)算指標(biāo)位置
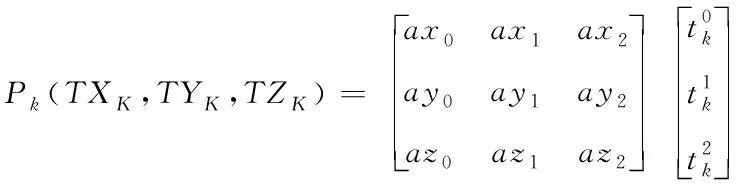
(10)
由此計(jì)算得到m個預(yù)測目標(biāo)軌跡點(diǎn)的時間存在一定誤差,采用下式進(jìn)行修正
tk=tk-1+|Pk-1Pk|/vtar
(k=2,3,…,m)
(11)
對于(k,k+1)段目標(biāo)軌跡,采用垂直面彈道數(shù)據(jù)集,從彈仰角道i=1開始,i=i+1遞進(jìn)搜索。如果彈道段Ddd(i)的高度和射程與(k,k+1)段目標(biāo)軌跡高度和射程不存在交集,則i=i+1繼續(xù)遞進(jìn)搜索。否則進(jìn)行彈道Ddd(i)各段(j,j+1)與目標(biāo)預(yù)報軌跡(k,k+1)段的高度和射程交集搜索。彈道段和目標(biāo)軌跡段不存在交集時,j=j+1,直到j(luò)=mi-1。存在交集時,如果彈道時間Ddd.Tij>tk說明射擊已遲后,結(jié)束本彈道,i=i+1繼續(xù)遞進(jìn)搜索;否則判斷彈道(j,j+1)段與目標(biāo)(k,k+1)是否相交,相交時結(jié)束i,j,k的全部搜索,否則繼續(xù)搜索。
通過上述搜索確定了彈道Ddd(i)的(j,j+1) 段與目標(biāo)(k,k+1)相交,且彈道所需時間小于目標(biāo)到達(dá)所需時間,說明可以通過延時發(fā)射使炮彈接近目標(biāo)。計(jì)算這兩段的最小距離,和最小距離時兩者的時間、位置,在此基礎(chǔ)上進(jìn)行彈道修正。
由于射擊仰角彈道數(shù)據(jù)集存在仰角間隔,最小距離處炮彈位置位于相鄰兩仰角的彈道之間,因此需要進(jìn)行射擊仰角修正。同時,上述搜索和求解都是在炮彈垂直面內(nèi)進(jìn)行的,未考慮射擊方位角,因此需要計(jì)算射擊方位角計(jì)算。
垂直面內(nèi)彈目最小距離處彈目矢量記為r*,如圖7。由三角形余弦定理計(jì)算矢量r到發(fā)射位置的夾角△β作為射擊仰角修正量。如果r*朝上,射擊仰角β=Avi+△β;否則β=Avi-△β。計(jì)算三維空間中彈目最小距離處目標(biāo)預(yù)報位置(TX*,TY*,TZ*),射擊方位角取α=atan2(TX*,TY*)。則理論上采用(α,β)發(fā)射角的炮彈應(yīng)該正好命中目標(biāo)。
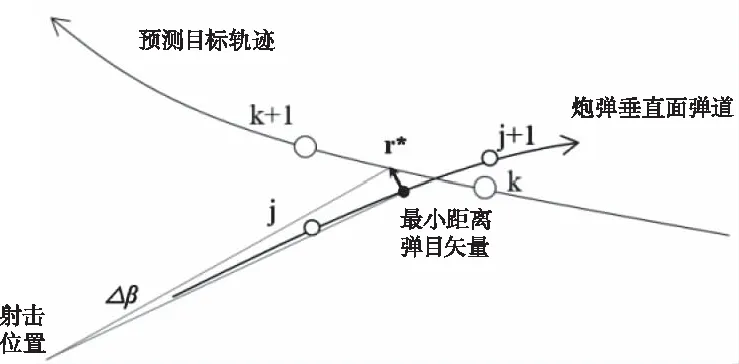
圖7 彈目最小距離處垂直面態(tài)勢
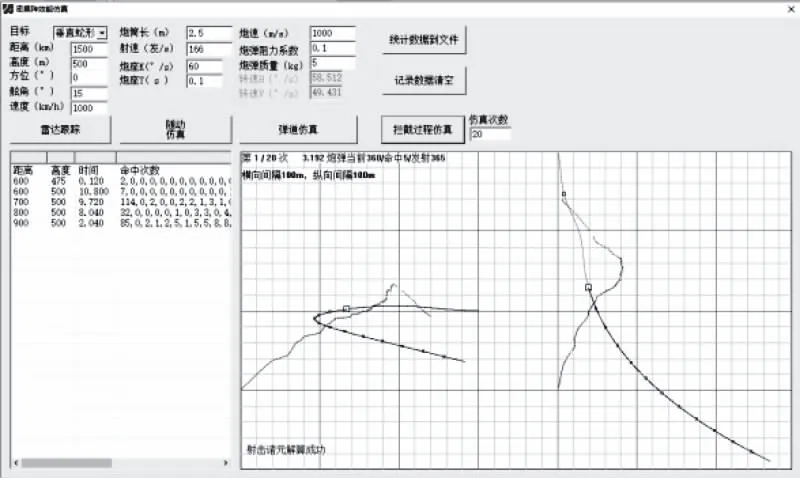
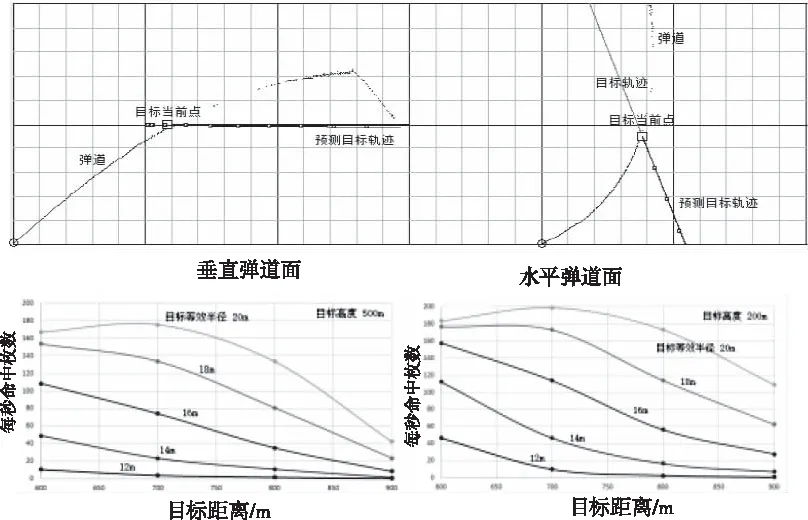
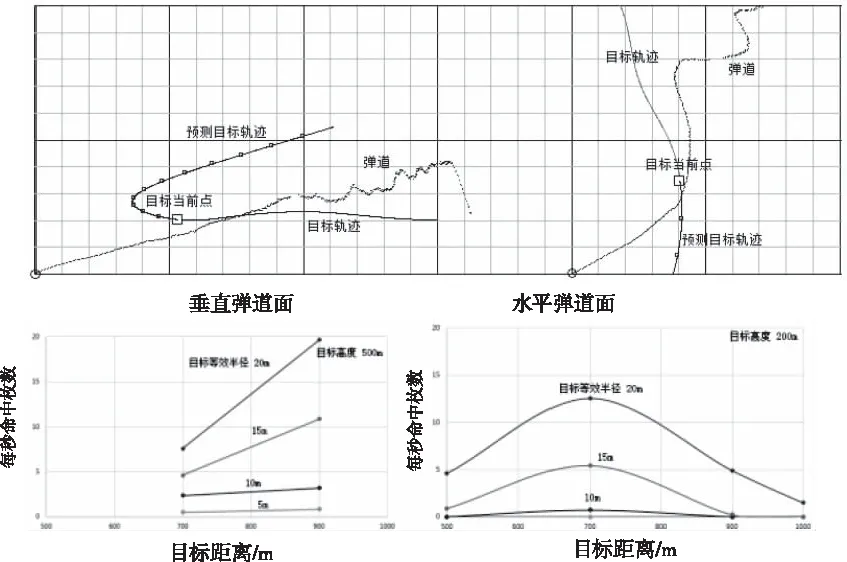
將計(jì)算得到的最小彈目距離處彈道時間、目標(biāo)時間分別記為T*和t*,T* 在每個仿真周期中,從射擊隊(duì)列中搜索當(dāng)前時間射擊的方位俯仰角,產(chǎn)生一個新的炮彈仿真實(shí)體。然后從射擊隊(duì)列中刪除射擊時間為當(dāng)前時間的記錄。 在每個仿真周期中,射擊隊(duì)列中首個記錄為火炮隨動的目標(biāo),記計(jì)劃時間與當(dāng)前時刻間隔為t。按式(9)計(jì)算t時間后角度變化量 Δα(t)=α(t)-α0 (12) K1和T1的取值可以U1=1作為參照,U1控制量∈[0,1]。 圖8是按照上述描述所建立的仿真軟件運(yùn)行界面圖。 圖8 仿真軟件界面 采用開發(fā)的仿真軟件進(jìn)行目標(biāo)三種突防機(jī)動過程仿真,得到攔截效能結(jié)果。目標(biāo)初始距離取1500m,速度1000km/h,平面圓周機(jī)動時水平角速度45°/s,平面和垂直面蛇形機(jī)動時水平和垂直最大角速度取10°/s和5°/s;火炮最大轉(zhuǎn)速60°/s,射速166枚/s(10000發(fā)/分鐘),出膛速度1000m/s。目標(biāo)航跡預(yù)報采用前1秒內(nèi)數(shù)據(jù)進(jìn)行擬合。 對每個目標(biāo)機(jī)動想定進(jìn)行20次仿真,每次仿真進(jìn)行1s后開始射擊,當(dāng)目標(biāo)距離由小變大或分時間大于5s時仿真結(jié)束。以下三圖是針對目標(biāo)的三種突防機(jī)動得到的仿真效能結(jié)果。 圖9 目標(biāo)直線機(jī)動突防 圖10 目標(biāo)圓周機(jī)動突防 圖11 目標(biāo)蛇形機(jī)動突防 通過上述結(jié)構(gòu)對比,得到以下結(jié)論: 1)目標(biāo)曲線機(jī)動突防時,單位時間內(nèi)命中概率明顯下降,三種目標(biāo)突防機(jī)動的命中概率依次大幅度降低。目標(biāo)曲線機(jī)動越強(qiáng),則目標(biāo)航跡預(yù)報精度越低,射擊誤差越大。 2)對低空目標(biāo)的命中概率一般都要大于對高空目標(biāo)的命中概率。目標(biāo)高度越大,則采用的射擊仰角越大,炮彈用時越長,命中概率越低。 3)目標(biāo)尺寸越小,則命中概率急劇降低。 采用裝備原理建模和作戰(zhàn)過程仿真的方法,得到密集陣目標(biāo)攔截的作戰(zhàn)效能,是一種經(jīng)濟(jì)高效的效能研究方法。 仿真研究很難完全面準(zhǔn)確地處理各種因素的影響,如目標(biāo)航跡預(yù)報的數(shù)據(jù)處理方法、雷達(dá)探測和火炮射擊方向的隨機(jī)誤差、目標(biāo)在炮彈方向上的真實(shí)距離。但仿真研究方法至少揭示了命中概率與目標(biāo)機(jī)動和態(tài)勢關(guān)系的一般規(guī)律,進(jìn)一步研究需要結(jié)合實(shí)裝試驗(yàn)數(shù)據(jù)進(jìn)行效果的數(shù)據(jù)修正,以及根據(jù)目標(biāo)外形和尺寸對命中進(jìn)行進(jìn)一步的細(xì)化處理。5.3 火炮隨動控制


6 仿真結(jié)果

7 結(jié)束語
