水下機器人定位導航技術發展現狀與分析
2022-04-08 07:52:54趙河明
兵器裝備工程學報 2022年3期
關鍵詞:系統
范 剛,張 亞,趙河明,李 波
(中北大學 機電工程學院,太原 030051)
1 引言
自上個世紀中后期,無人潛航器(unmanned underwater vehicle,UUV)受到越來越多國家的重視,由于具有隱蔽性好,可搭載多種用途傳感器、設備或武器,可執行如掃雷、反潛等特殊任務,效費比高,機動靈活,可回收再利用等優點,世界各國都在大力開展UUV的科研工作。UUV依照控制類型的不同,可以分為遙控操作潛水器(remote operated vehicle,ROV)以及自主水下潛器(autonomous underwater vehicle,AUV)2種。由于AUV不同于ROV,其與水面人員無臍帶連接,導航定位完全依靠自主,且AUV自身的體積和能源儲量有限,因此研究出耗能低、多目標、航程遠、定位精度高的導航定位系統,對于AUV是否能勝任遠距離多用途任務至關重要。
以下主要介紹UUV的幾種基本導航方式,并著重列舉出近些年國內外熱點研究的幾種組合導航系統,分析各自的系統原理,比較它們之間的優劣,提出了目前的技術難點和將來的研究方向。
2 水下機器人基本導航方式
2.1 慣性/航位推算導航
航位推算導航(dead reckoning,DR)是一種很常見的基本導航方式。其方法是依靠羅經和多普勒速度計(doppler velocity log,DVL)得到水下潛器的位姿、速度,然后對時間進行積分,推算出當前位置。
慣性導航(inertial navigation system,INS)應歸類于航位推算導航。原理與航位推算導航相似,通過三軸陀螺儀、三軸加速度計和DVL得到潛器的旋轉角速度、位姿方向和加速度,結合相關數據對時間進行兩次積分,解算出潛器當前的位置。慣性導航系統可分為平臺式以及捷聯式2種,因捷聯式相比于平臺式而言,有著體積小、結構簡單、方便維護等特點,被大多數慣導系統所采用。
1958年,世界上第一艘核潛艇美國“鸚鵡螺”號就搭載了當時較先進的慣導系統在北極連續潛航21 d,航程15 086 km,而誤差僅有37 km。我國對于慣導系統的研究相對較晚,不過從1994年沈陽自動化所成功研制的第一臺AUV“探索者”號,到2018年北京自動化控制設備研究所研發的深海型高精度慣性基組合導航系統,研究成果是相當可喜的,至此我國完全依賴于國外水下高精度導航設備的歷史終于被打破了。
但是無論是DR或是INS,都會隨著時間的累積而使得誤差逐漸增大,從而偏離原來的目標位置。通過上浮至水面,獲取衛星定位信號,雖然可以修正誤差,但上浮、下潛所需的能量較大,這對于能源本就有限的水下潛器來說是不可取的。如何使用更多的輔助導航技術來修正隨時間而積累的偏差,成為今后的重點研究方向。
2.2 水聲學(SONAR)導航
由于水下電磁波的衰減極其嚴重,傳播距離非常有限,對于長時間進行深水潛航的AUV來說水聲導航系統因其在水中較電波、光波傳播距離更長成為了目前比較主流的水下導航方式。
水聲學導航的原理是通過計算AUV與聲標之間聲波信號的傳輸時間及其相位差來確定AUV與聲標之間的相對位置,然后通過坐標轉換得到AUV在大地坐標系上的位置信息。水聲學導航大致可分為3類,即長基線(LBL),短基線(SBL)和超短基線(USBL)3種導航方式,具體取決于基線的長度、基陣的數量和布置位置(如圖1)。

圖1 3類聲學定位導航系統示意圖Fig.1 Schematic diagram of 3 kinds of acoustic positioning and navigation systems
3種導航方式各有利弊,LBL導航精度最高,但其基陣布設需花費大量的時間和成本,SBL和USBL則相對簡單但其工作距離和精度都要比LBL小的多。表1為聲學導航系統的分類及特點。
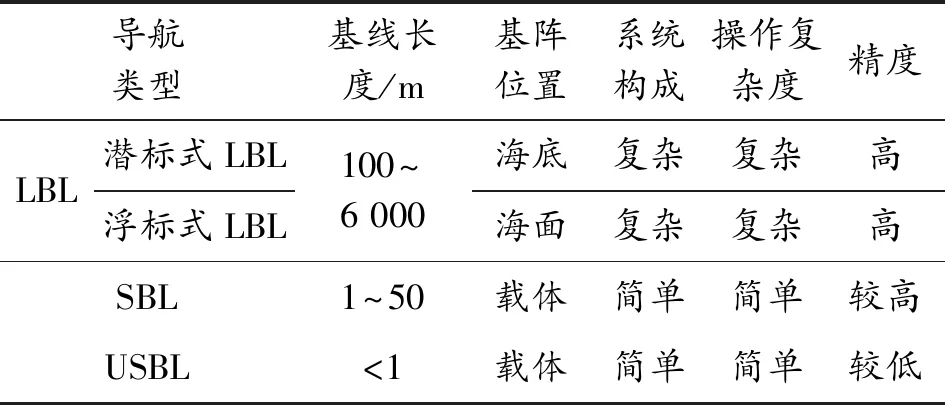
表1 聲學定位導航系統分類Table 1 Classification of acoustic positioning and navigation systems
國外的聲學導航系統發展相對較早,包括美國、法國、英國等國家已經生產推出系列化的產品,從軍事應用到民品,種類多樣,技術成熟。2013年,我國自主研發的載人潛器“蛟龍號”,利用LBL長基線導航系統,實現了靜止狀態下方差為2 cm的定位精度,標志著我國聲學導航技術邁向了新的高度。
聲學導航系統的誤差來源主要有系統誤差、聲速誤差、反射路徑誤差、噪聲誤差和測量誤差等。如何有效的降低這些誤差對信號的干擾,是以后聲學導航研究所必須面臨的問題。
3 水下機器人組合導航方式
3.1 SINS/SONAR組合導航方式
水聲學導航系統必須在其基陣范圍內才能夠發揮作用,因而作用范圍有限,而慣導系統的位置誤差會隨著時間的累計不斷增加。為了實現遠航程、高精度的導航任務,SINS/DVL/LBL組合導航應運而生。
SINS/DVL/LBL組合導航系統不僅會明顯的降低慣導系統的時間累計誤差,還會提高水下機器人的工作范圍,使得水下機器人在保障導航精度要求的前提下,能夠到達更遠的距離。李旻等闡述了一種SINS/DVL/LBL組合導航系統,驗證了SINS/DVL位置誤差的可觀性低,而LBL可為其提供準確的位置信息,進而提高位置誤差可觀性。法國iXblue公司生產的“ROVINS”純慣導位置精度為0.1%TD,添加了USBL/LBL輔助導航之后,其位置精度三倍于USBL/LBL的位置精度性能。
復雜的水下環境造成了不可避免卻對導航系統性能影響嚴重的干擾數據,對于數據的處理方面,張濤等闡述了一種利用UKF對多傳感器數據進行融合處理的技術,表明UKF濾波精度確實是要高于EKF。趙俊波等在SINS/DBL/LBL組合導航系統中使用改進的變分貝葉斯濾波方法來代替經典的卡爾曼濾波方法,改善了由測量噪聲和野值干擾所帶來的濾波精度下降問題。朱兵等提出了一種聯邦卡爾曼濾波算法,降低了測量噪聲對導航精度的影響。
以上幾種濾波算法,均能較好的改善導航系統性能。
在水下信標的設計方面,葉連鳳等設計了一種水下定位信標裝置,其定位距離最大可以達到1 200 m,定位精度優于5‰,工作最大水深為300 m,最長工作時間要大于24 h。王麗等將DBSCAN算法應用到信標定位中,并設計了水下信標陣的整體航路。
SONAR/DVL/LBL組合導航系統既解決了慣導系統隨著時間誤差累積的缺點,也提高了水聲導航的作用范圍,但其導航精度依然存在著不小的誤差,如何通過技術手段來修正這些誤差,是今后SONAR/DVL/LBL組合導航需要解決的問題。
3.2 SINS/SONAR/GNSS組合導航方式
SONAR/INS導航系統雖然可以較精確的提供AUV的導航定位信息,但聲標的位置定位工作是比較繁瑣的,尤其對于未知海域來說,并沒有足夠的條件來進行聲標、基陣的定位工作。利用全球衛星導航系統(GNSS)對海上浮標進行自主定位,AUV通過接收、處理海上浮標的聲波信號,結合慣導系統和測深傳感器最終確定自身的位置,從而較好的解決上述問題。
GNSS中美國全球定位系統(GPS)的空間信號精度為0.52 m;歐洲伽利略系統(Galileo)的空間信號精度為0.25 m;俄羅斯格洛納斯系統(GLONASS)最高能達到0.03m的地面增強服務;我國的北斗衛星導航系統(BDS)定位精度優于10 m,測速精度優于0.2 m/s,授時精度優于20 ns并且在亞太地區的精度數據更加優秀。以上4種衛星定位系統均能較好的滿足對海上浮標的定位需求。
衛星定位系統主要由不在同一平面的4顆定位衛星、地面基站和水面定位設備而組成,通過計算建立的數學模型,得到設備當前的位置信息。國內外研究人員對于SONAR/INS/GNSS組合導航系統都做了相應的研究。Youngberg等提出了一種SONAR/INS/GNSS組合導航方案,利用兩個浮標接收GPS信號,獲得其在大地坐標地上的位置,并且利用GPS相互通信,確定二者之間的距離差值,然后通過聲學導航系統為水下多個目標提供位置信息。李士剛等對借助BDS和智能浮標為水下平臺提供導航定位進行了實驗驗證,結果顯示浮標陣內定位精度最高為4.5 m,邊緣處的最低定位精度是7.7 m。在信標的定位精度方面,張丹等通過計算和仿真證明GPS對信標的定位存在一定誤差,但不超過兩米。王秉洲等利用SINS/SONAR/GPS設計了一種小型無纜水下機器人組合導航裝置,可實現較長距離的導航任務。以上中外研究成果證明,通過浮標利用GNSS可以更好的提高水下定位導航精度,豐富了水下定位導航方式。
利用GNSS為AUV提供輔助導航實質上是地面導航通訊功能向水下的延伸。而如何將水下的信息通過GNSS傳至地面指揮中心,形成陸海空全方位一體化的導航通訊系統,就需要依靠水下通信系統來完成。水下通信大多是結合GNSS形成與地面控制人員的聯系,不僅可以將水下潛器的位置信息、獲取的數據傳送予地面/水面控制人員,還可以將控制人員的指令傳達至水下潛器,以達到更好的定位導航和路徑規劃效果。由于電磁波在水中的衰減問題嚴重,最長的通信距離也只有百米左右,藍綠光波雖然傳播距離略長,但難以突破千米量級。傳播距離至上千公里,通信速率可達10~100 bps的水聲通信成為當前深海通信的唯一選擇。
水下通信網絡大致由水下節點、水面浮標、通信衛星節點和岸上基站等組成。目前美國已經實現了對水下100 m左右深度的激光通信。2001年,一種為高緯度地區和冰下作業而設計的ALTEX AUV完成了首次北極極地實驗,它所搭載的通信系統通過冰上浮標和GPS實現了與地面考察人員的數據通信。Frédéric Mosca等設計了一種新型聲源,采用中心頻率為500 Hz,帶寬為100 Hz的調制解調器,利用“被動時間逆轉過程”實現了1 000 km范圍內100 bit/s的遠程通信。
由于水下環境復雜多變,海水聲波的吸收衰減、海水的多經效應、多普勒頻移大、水聲信道的時變性以及環境噪聲的疊加影響,水聲通信需要攻克的這些技術難點是未來研究的主要方向。同時,水聲信道的信號與GNSS信號都存在著受到外界惡意干擾的情況,如何讓水下機器人自動識別干擾信號,自主進行航線修正也是此類組合導航方式所要面臨以及必須解決的問題。
3.3 結合地球物理的組合導航方式
慣性/航位推算導航和SONAR/INS/GNSS組合導航存在誤差隨時間發散、隱蔽性差等缺點。地球物理導航因具有精確度高、隱蔽性好、不受外界干擾等特點,可以很好的彌補前述導航方式的不足。
地球物理導航系統主要由慣性導航單元、地球物理測量單元和數據匹配算法單元組成。慣性導航單元負責提供初始位置和工作范圍的限定,地球物理測量單元主要提供AUV實時測量數據,數據匹配算法單元主要是將測量數據與地球物理數據庫做匹配從而獲得AUV的實時位置信息。地球物理導航的系統工作流程如圖2所示。
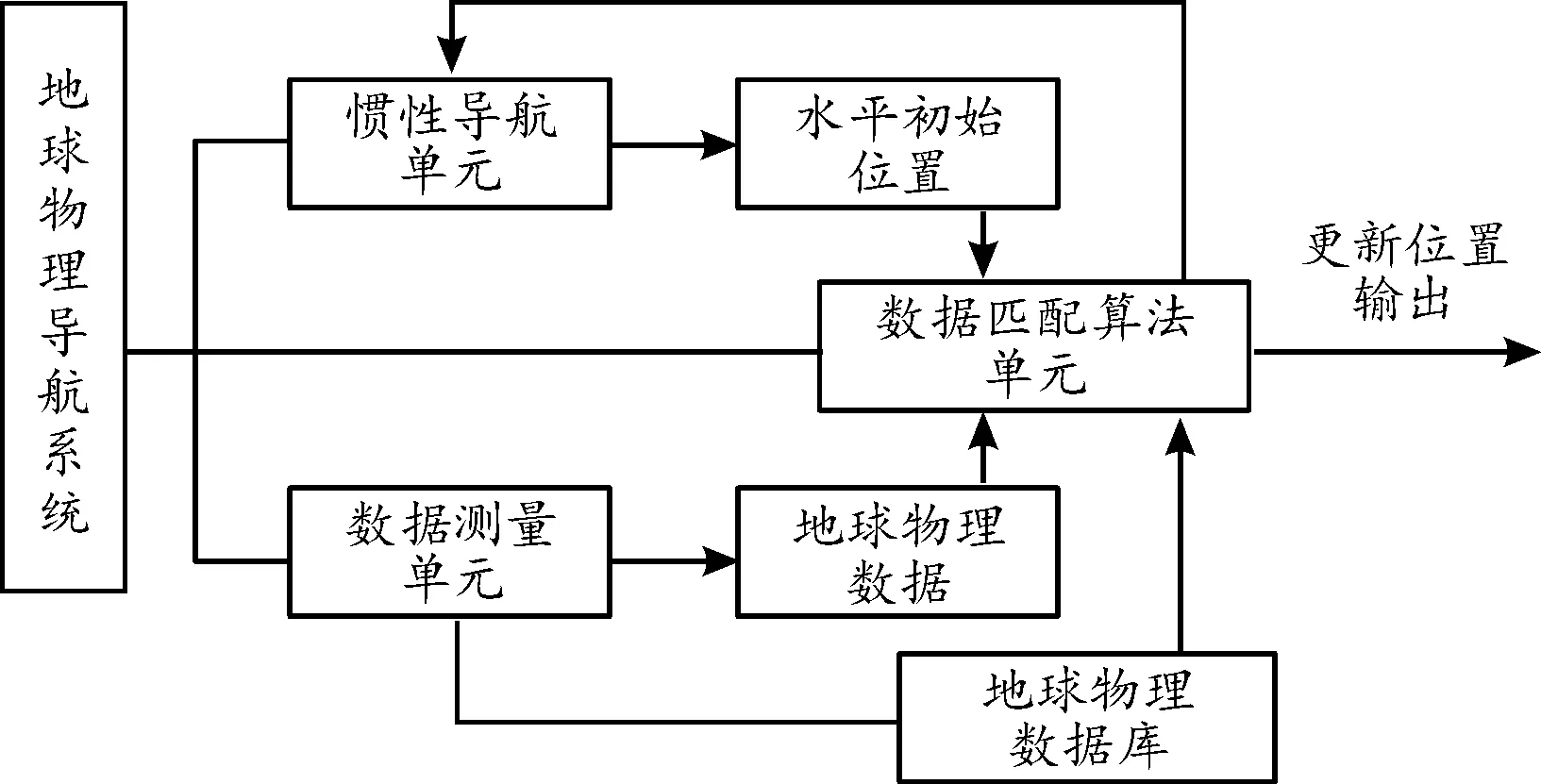
圖2 地球物理導航系統工作流程框圖Fig.2 Geophysical navigation system workflow block diagram
地球物理導航大致可分為地形、重力以及地磁匹配導航,三者原理相似,其中研究人員對于地形匹配導航系統的研究較多。Ingemar Nygren在他的博士論文中提出了一種水下機器人定位方法,該方法借助聲吶和海底地形圖確定AUV的絕對位置。驗證了偽波峰位置的似然函數收斂到一個高斯概率密度函數時,測量的波束數目會趨于無窮大。Meduna D K等使用地形相對導航技術(terrain relative navigation,TRN)在海中進行了導航實驗,其導航精度達到了5~10 m,遠超于航位推算導航的5%~25%觀測精度,TRN/AHRS組合導航完全能夠達到甚至超越水聲學導航的精度,并且證實了高性能TRN可以使用低成本傳感器來代替原來的高精度慣導系統和高品質聲吶(如多波速回聲測深儀)。韓月等對于地形輔助定位提出了一種改進的粒子濾波算法,以減少粒子多樣性的損失來提高系統的定位精度。
對于其他2種地球物理導航方式,劉念等使用TERCOM和UKF進行重力梯度輔助導航,修正INS的累積誤差,以達到提高導航精度的作用。葛錫云等利用地磁對INS系統進行輔助導航,仿真結果表明,500 s內的位置精度相比于純INS系統提升了4倍,誤差小于1 m。
地球物理導航的關鍵是獲得先驗地球物理數據庫,而無論是國外還是國內對此數據的收集都是非常有限的,這也是制約地球物理導航的重要原因。如何獲得精確、大量的地球物理數據庫,并且設計高效、快速的算法來處理匹配數據是今后此方法研究發展的方向。
3.4 多UUV協同導航方式
在廣闊無際的海洋中,想要依靠單獨的UUV來完成任務,是很困難的。為了執行大范圍、多任務、多目標的潛航任務,多UUV協同導航為此提供了可能。多UUV協同導航能夠有效的降低慣導系統的精度誤差,并且提高多個UUV的智能性和效率,完成單個潛器很難完成的任務。
多UUV協同導航按其結構方式不同,可分為2種,即并行式以及主從式。主從式相比于并行式成本更低,精度也較高,從而成為了多UUV協同導航的主流方式。Allotta等就設計了一種主從式多UUV協同導航系統,將多個AUV配備低成本慣導單元和深度傳感器,其中只有一個具有高精度DVL,利用配備DVL的主AUV確定其他從AUV的位置,并且通過GPS與母艦通信,獲得各個AUV的具體位置。
針對多UUV間的協調控制方面,牟春暉等設計了一種協調路徑跟蹤控制器,使得多UUV間的協調達到更好的效果。胡長清等通過建立濾波的狀態方程和觀測方程,利用INS和GNSS融合多種導航信息,提升了多UUV間的定位導航精度。Chen S等針對無領導多AUV系統和前導跟隨多AUV系統,提出了2種新的容錯控制技術,使得每個AUV與其相鄰的AUV交換信息,即分布式共識控制策略來容忍多個AUV系統的信息傳輸故障。
另外,在控制算法方面,盧健等提出了一種序貫EKF協同導航算法,較好的提高了協同導航系統的定位導航精度。Sahu等提出了一種多AUV的集群控制算法,這種基于模糊人工勢函數的模糊植絨控制算法要優于數學勢函數的控制器性能,對多UUV的合作運動控制提供了有效的所需路徑。
多UUV協同導航對于各個潛器的協調控制和個體間的通信要求較高,如何協調好每個個體的路徑規劃并且保持它們之間的通信順暢是今后需要重點研究的方向。
3.5 結合人工智能的水下定位導航方式
近年來,人工智能與大數據技術的迅猛發展為水下定位導航提供了新的思路與方向。以模擬自然界為核心思路的人工智能算法,在目標識別定位、路徑規劃、改善定位精度等方面都得到了廣泛的應用。
在目標識別定位方面,李昱等設計的一種基于卷積神經的水下識別系統識別率能夠達到99.18%。美國Scripps海洋研究所與中科院聲學所的研究人員通過對一組50層的深度殘差卷積神經網絡進行訓練,實現了在未知海洋環境中83.8%的深度距離估計誤差小于10 m,88.8%的聲源定位距離誤差小于1.5 km。徐鳳強等設計了一種基于反饋機制融合USBL的多信息分析算法,并成功應用到海產品的智能抓取中。董鵬等利用YOLOv3目標檢測算法在任務范圍區域實現了目標的檢測與定位。
對于未知海域的定位導航問題,張揚等就提出了一種基于ORB—SLAM2的水下定位算法,應用視覺SLAM通過相機在測量所處環境數據的同時,估計自身所在位置并繪制出周邊環境的地圖,用以后續的定位導航,并通過海試驗證了此算法用于水下定位確實是可行的。
隨著人工智能的迅速發展,其在水下定位導航的應用也將更加廣泛。如何將人工智能技術與水聲通信結合進行任務目標改變時路徑的自主修改,如何配合遠距離航程的AUV實現最后一段距離的目標定位是未來遠航程、多目標、高精度定位導航的發展方向。
對水下機器人各類定位導航方式的特點進行總結和比較,如表2所示。
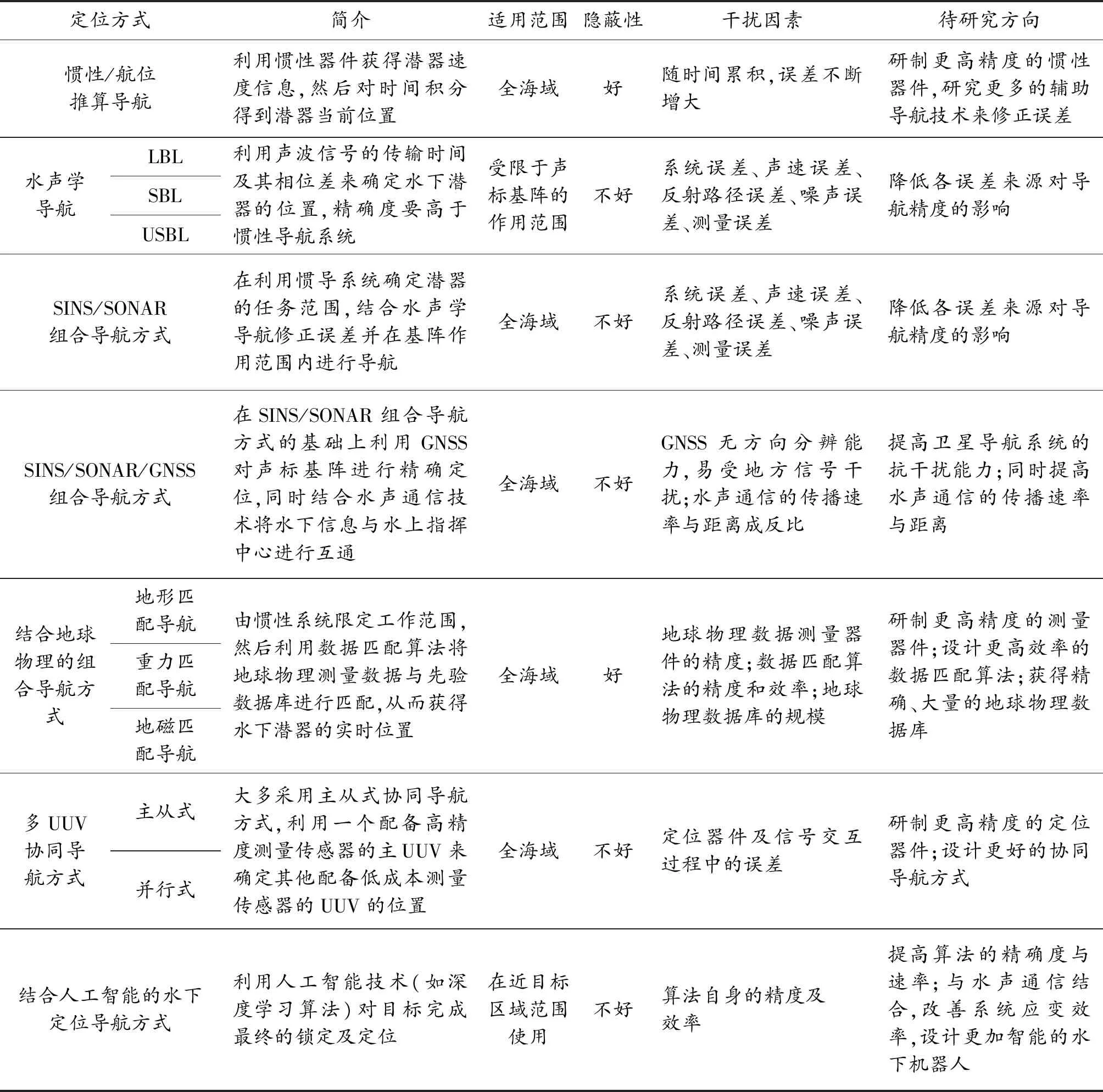
表2 水下機器人定位導航方法Table 2 Comparison of positioning and navigation methods for underwater robots
4 結論
本文根據近年來國內外對于水下機器人定位導航的研究成果,總結、分析了幾種典型的水下定位導航方法,并結合如水聲通信、人工智能等新技術的發展,展望了水下定位導航技術新的發展思路和方向。
今后水下定位導航的研究熱點將會在以下幾個方面:
1)提高數據濾波處理質量,設計魯棒性更強的濾波算法。
2)設計高精度、低成本的測量傳感器,提高水下機器人定位導航系統性能。
3)融合GNSS與水聲通信,讓地面人員對水下情況了如指掌,增強水下機器人位置的可觀測性,提高水聲通信的傳輸距離和速率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32