LED脈沖光源分時復用的光場相機成像技術研究
2022-04-08 07:55:08嚴賽美武錦輝蘇凝鋼牛雅昕
兵器裝備工程學報 2022年3期
嚴賽美,劉 吉,,武錦輝,蘇凝鋼,司 宇,牛雅昕
(中北大學 a.信息與通信工程學院;b.電子測試技術重點實驗室,太原 030051)
1 引言
爆炸場景深空間較大,如果沿用傳統(tǒng)單成像系統(tǒng)的方式,由于其拍攝空間信息有限,勢必導致多個破片信息丟失。若采用多相機陣列的方式,不同相機分別負責拍攝不同的層次空間,但是,多相機系統(tǒng)將造成系統(tǒng)成本和實驗成本大幅度的提高,相機之間的協(xié)同控制、在爆炸場中多相機的布置和防護等也帶來諸多技術難題。所以,對于高速運動、多主體且距離較大的目標對象,光場相機成像技術的優(yōu)點更為明確,其內部特有的微透鏡陣列(MLA),可以利用相機的單次曝光來對全場的光場信息進行記錄,能夠解決單相機成像信息有限及多相機系統(tǒng)復雜、操作困難等一系列問題,可將該技術引入到爆炸場中多破片速度、形狀及空間分布等參數(shù)的測試中。
但是,針對戰(zhàn)斗部爆炸場惡劣的測試環(huán)境,破片本身具有速度快、尺寸小、分布范圍大等難點,對光場相機的成像幅率將提出更高的要求,而且目前光場相機由于數(shù)據(jù)量很大,既要保存光線的位置信息,又要保存角度信息,導致光場相機的幅率不如傳統(tǒng)相機的高,且光學傳感器在光場相機低曝光時間內成像時靈敏度不夠,無法獲得清晰的圖像等限制,針對此問題,采用光場相機配合添加外部多種單色窄脈沖主動光源分時照射被測物體,提高待測物體的光照度,有效提高相機的成像幅率,且選用的高功率窄脈沖LED光源為紅綠藍3種單色光源。將采集到的圖像根據(jù)通道分量解析為3幅不同時間單色光源照射后的通道圖像,使得圖像獲取效率提高了3倍,以此來提高光場相機用于戰(zhàn)斗部爆炸場的成像幅率。
2 光場相機成像原理
所有進入相機的光場中的光線的波長、強度與方向等信息都能被光場相機所采集到,得到的本質上即空間中所有的光輻射函數(shù)的總體。由Levoy提出的光場渲染理論可知,光線是同時帶有二維的位置坐標信息(,)與二維的方向信息(,)的,在光場中傳播時,都是可以對其用如圖1中的-和-兩個平面參數(shù)化來表征的,主透鏡和傳感器平面與光線一起相交于點 (,)與(,),形成的四維的光場函數(shù)為(,,,),其中平面-表示相機鏡頭光瞳面,平面-表示成像傳感器面,且為相機主鏡頭與圖像傳感器之間的距離。通過將光場參數(shù)化來表示,在 (,)像面的某一點,總輻射能量為
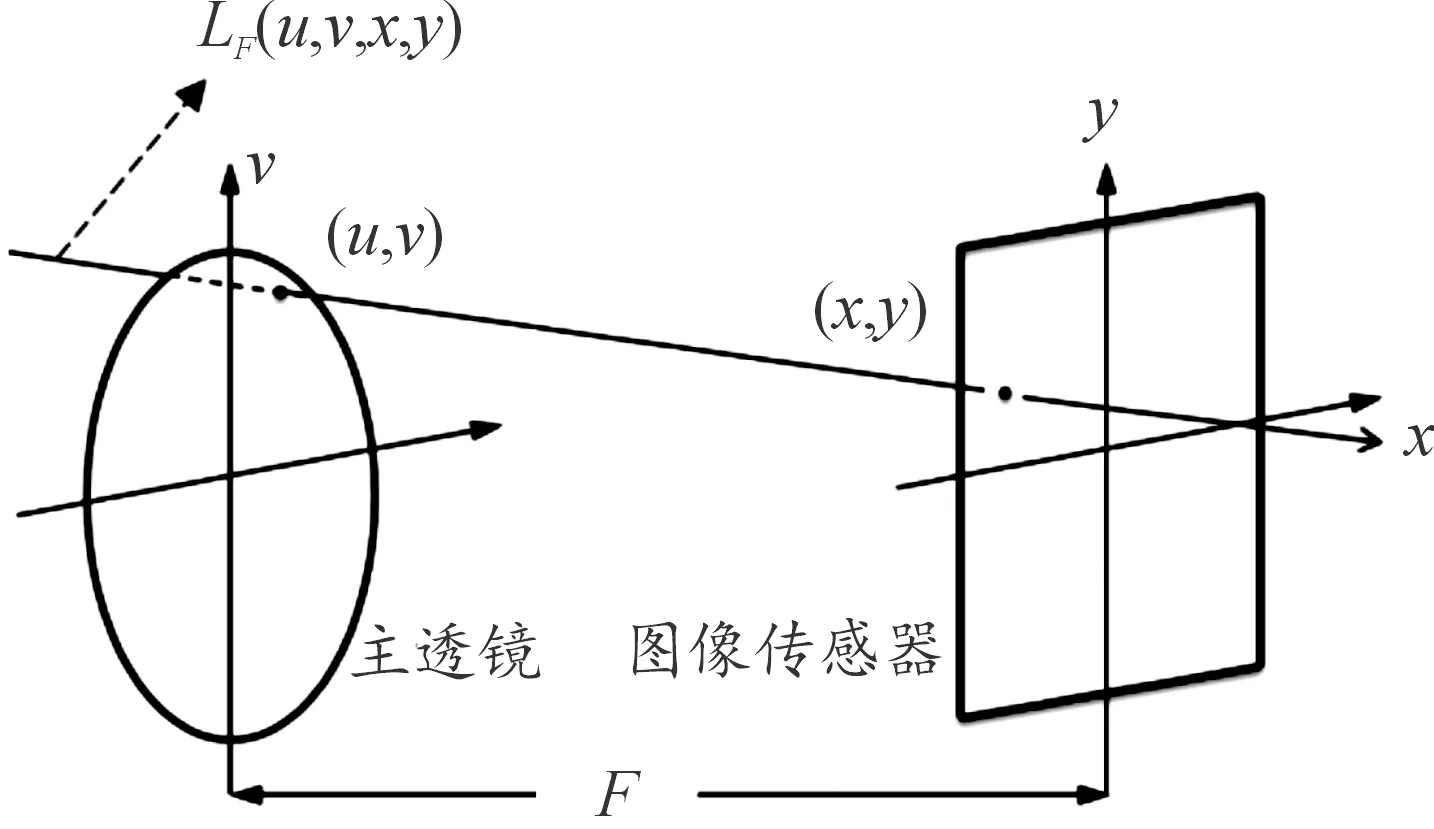
圖1 光場四維參數(shù)化表示圖Fig.1 Four-dimensional parametric representation of light field

(1)
式中:(,)為透鏡的光瞳函數(shù),(,,,)代表一條穿過光場的光線,為光線與光瞳平面法線的夾角,該公式將光場相機的成像過程進行公式化,假設角很小,而且主透鏡的光瞳面和成像傳感器平面無窮大,旁軸近似情況下,可以把式(1)簡寫為

(2)
基于MLA的光場相機,其成像原理:目標物上的某個點通過主透鏡的折射,聚焦在微透鏡陣列處,再由一個子微透鏡散射到圖像傳感器上,得到就是此點處的光場信息,光場相機成像模型如圖2所示。包含了×個子微透鏡的微透鏡陣列位于主透鏡的后焦平面上,其中一個子微透鏡對應著×個成像探測器像元;微透鏡在成像過程過充當兩個重要的角色,第一是散焦的元件,將通過主透鏡折射得到的聚焦像點,散射到許多的成像傳感器單元上得到一個模糊的圖像;第二是把主透鏡的光瞳成像在圖像傳感器上,并被若干個傳感器單元所覆蓋,也就是說成像傳感器單元被切分成許多的子孔徑單元。這樣成像傳感器單元所得到的信號對應著目標物的某點經(jīng)過光瞳的某一個子孔徑的能量變換,對應著的是方向信息,由此一來,探測器上就能得到擁有更多的信息的圖像。這種可同時保存光場位置、角度等信息的獨特優(yōu)勢,為大景深空間中破片的空間分布和速度等參數(shù)的測試帶來了新的研究思路(圖2)。
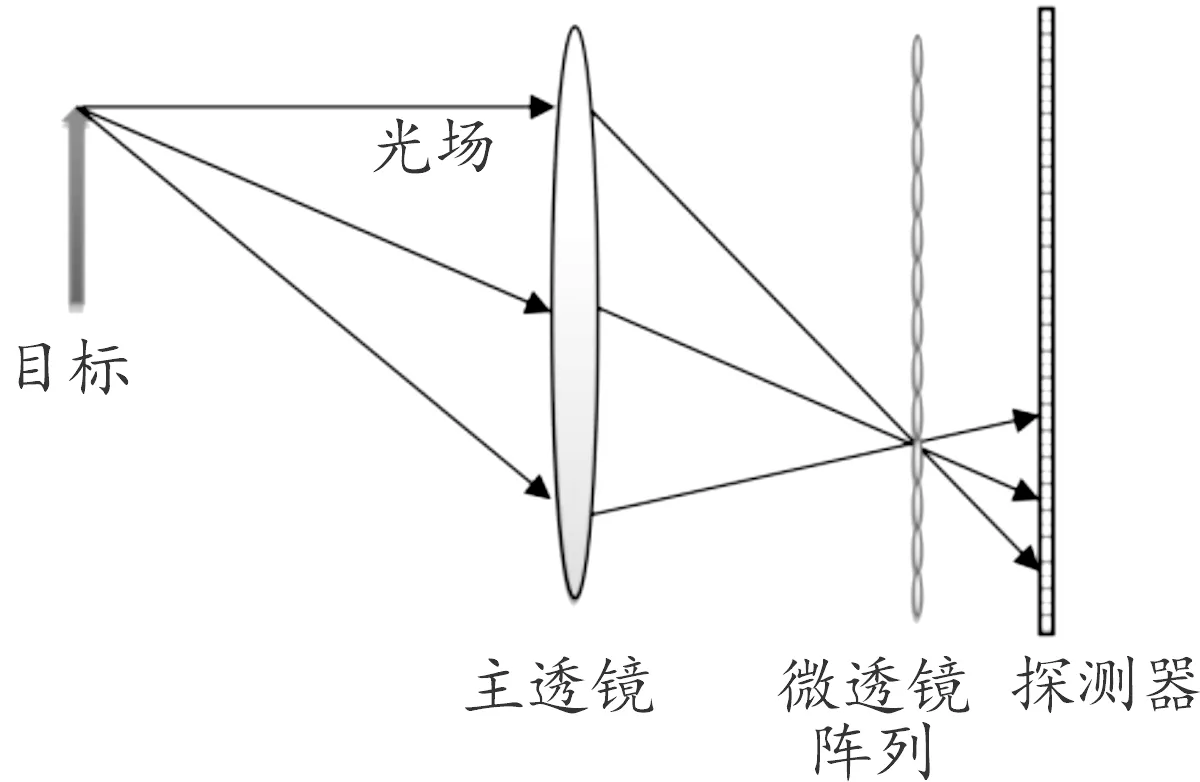
圖2 光場相機成像模型示意圖Fig.2 Light field camera imaging model
在光場相機成像系統(tǒng)工作時,破片群進入相機視場范圍的時間不確定,而且破片速度高,光場相機幅率、記錄時間有限,不能人工按動相機快門鍵進行拍攝,另外戰(zhàn)斗部靜爆時現(xiàn)場比較危險,因此需要相機能夠自動觸發(fā)。而在戰(zhàn)斗部靜爆過程,會產生高溫、高壓、強火光等影響,特別在戰(zhàn)斗部炸心附近區(qū)域,光比較強烈,因此可設計專用的光觸發(fā)裝置與光場成像裝置、主動光源照明系統(tǒng)相結合,實現(xiàn)相機自動觸發(fā),而且實現(xiàn)相機與光源觸發(fā)同步,不但提高了光場相機的圖像捕獲率,而且降低了在試驗過程中的危險性。
3 脈沖光源分時復用主動照明
當R、G、B三種單色的脈沖光源在相機的一次曝光時間內,分別在、、三個時刻主動對光場相機的視場范圍內的待測物體進行照射,時序圖如圖3。光場相機和脈沖光源在同一時刻獲得爆炸火光信號處理完生成的TTL觸發(fā)信號后,相機啟動拍攝,三色單脈沖光源開始分時照明,假如相機電子觸發(fā)裝置接收觸發(fā)信號延遲一段時間啟動拍照,脈沖光源R比相機的觸發(fā)時刻再延遲5 μs開始照明,經(jīng)過一定的時間間隔后脈沖光源G啟動照明,再經(jīng)過一定時間間隔脈沖光源B啟動照明,若相機的曝光時間在10 ms內,則三單色光源脈寬均在10 μs以內,設置單色光源脈沖的閃光時間均分布于相機曝光周期之內。
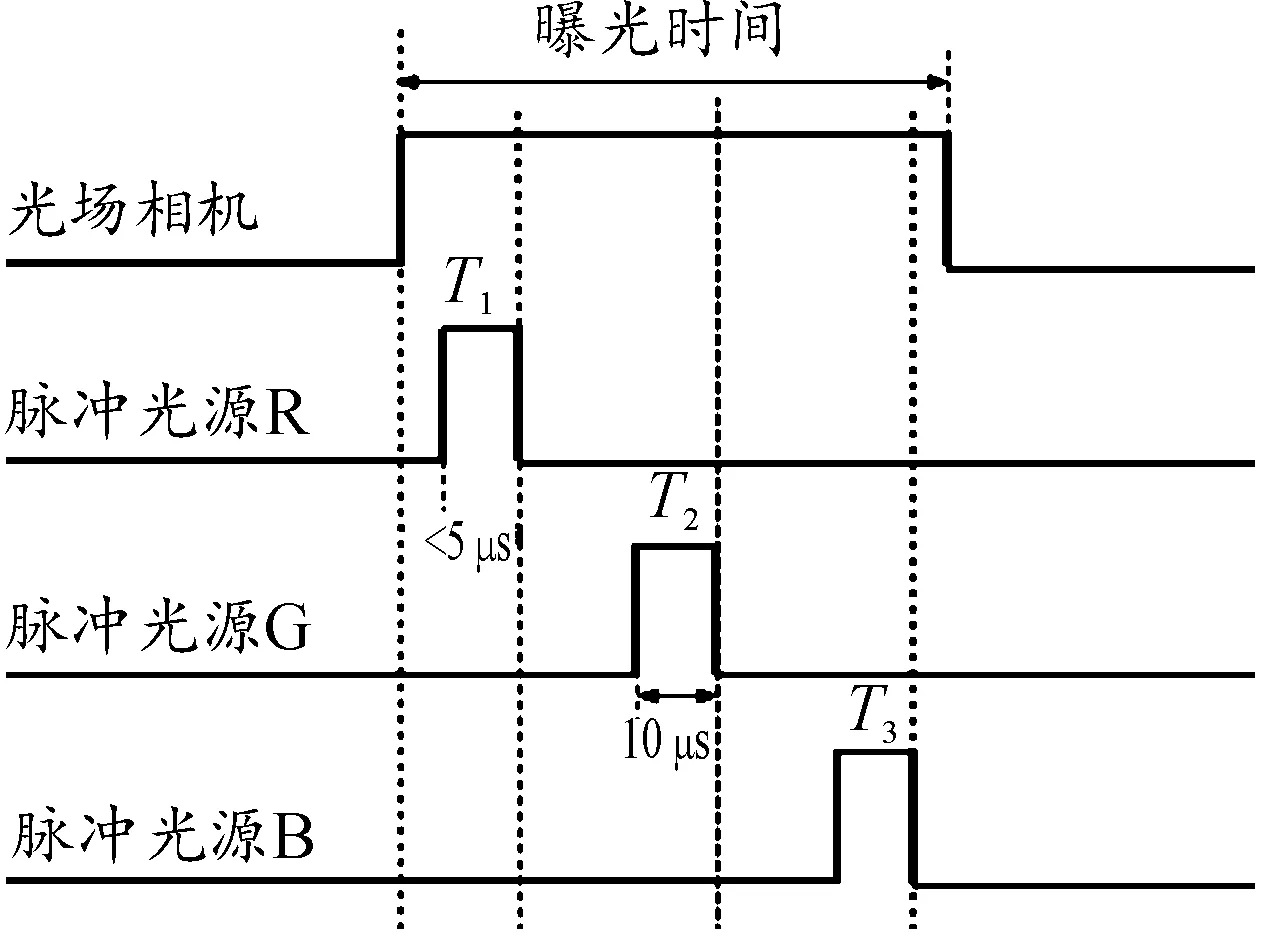
圖3 系統(tǒng)工作的時序圖Fig.3 The timing of how the system works
然后拜耳陣列和光學傳感器對物體反射的光進行電荷積累成像,這樣相機可獲得一幅有效的光場圖像,依據(jù)拜耳彩色濾波器編碼方式,對所得圖像實施反馬賽克處理后,可獲得RGB色的光場圖像,然后經(jīng)過分解可得到R、G、B單通道解析圖像,如圖4所示。
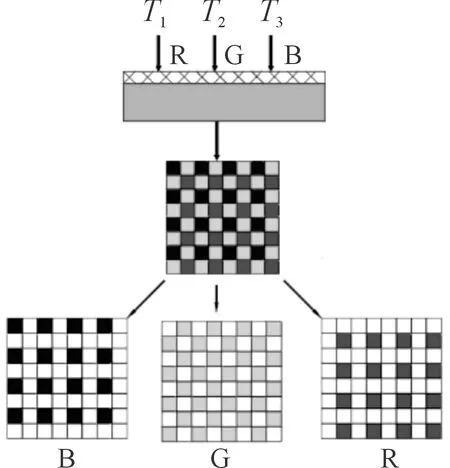
圖4 單色光分時復用解析出三幅單色圖Fig.4 Monochromatic optical time-sharing multiplexing resolves three monochromatic diagrams
為了后期能夠對光場圖片進行RGB解析,我們將采用紅綠藍三種單色光源為脈沖光源,根據(jù)拜耳陣列RGB光譜響應曲線,如圖5,以某單色光照明時其他光源響應率應遠低于照明光源響應率為參考標準,選用的3種單色脈沖光源的中心波長依次為:紅光為620 nm,綠光為535 nm,藍光為450 nm,這3個光源的中心波長基本與光場成像系統(tǒng)中的拜耳三基色濾波器中心一致,如此可在最大程度上使光源的利用率得到提升和在后期圖像處理中更好地進行彩色圖像解析,達到提高光場相機幅率的目的。另外為了使單色光源在窄脈沖時間內被相機有效捕捉到,單色光源應擁有極高的光能量輸出。LED光源響應速度快且可通過控制本身的驅動電流的輸出來調節(jié)LED亮度,可滿足大功率光源的需求。
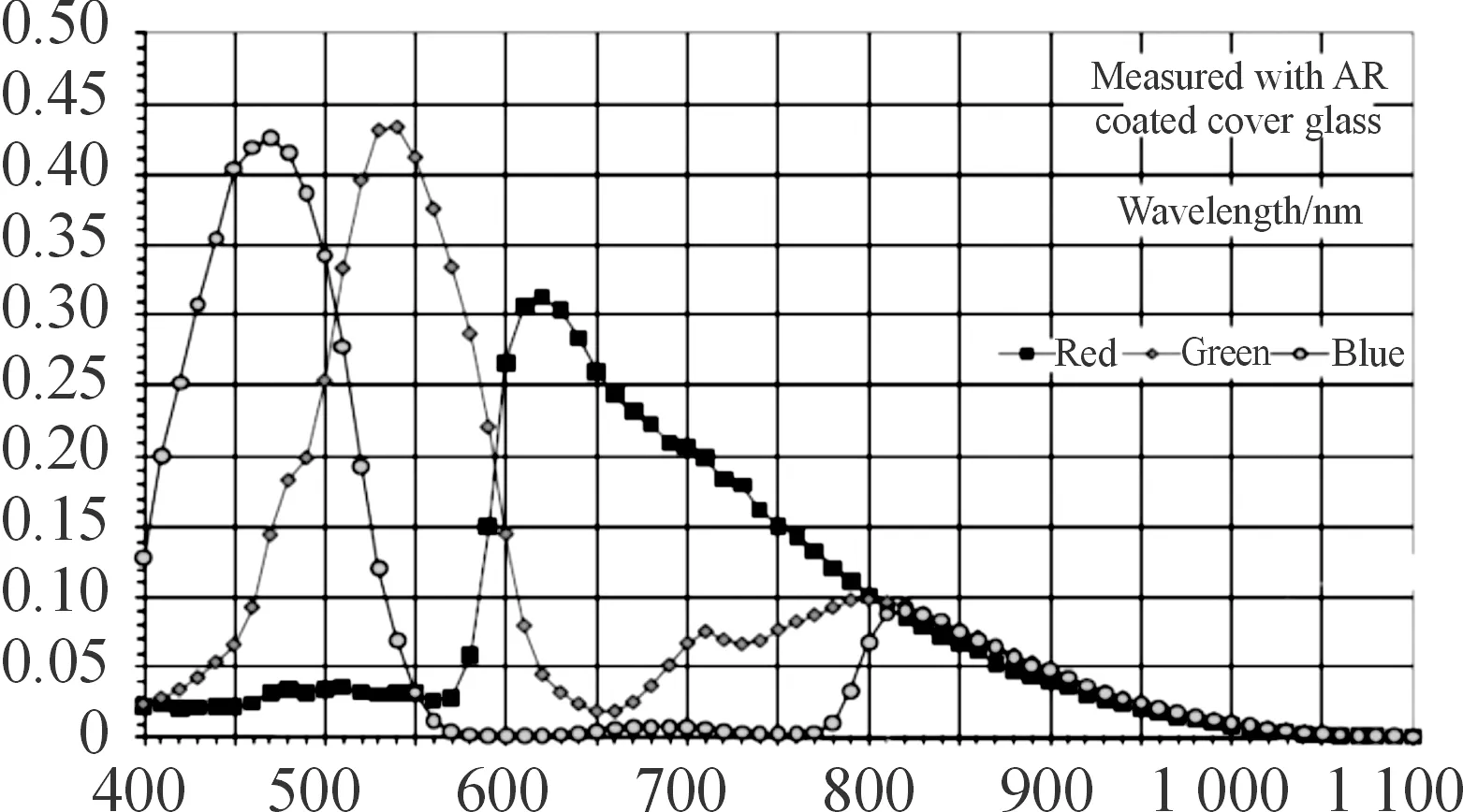
圖5 拜耳陣列的RGB光譜特性響應曲線Fig.5 RGB spectral characteristic response curve of Bayer array
4 實驗驗證與分析
在研究室的條件下進行了驗證,測試搭建圖如圖6。在黑色背景板布置3個目標物,然后固定在一個運動的軌道上,且該黑色背景板平面與相機鏡頭垂直。相機選用Lytro Illum光場相機,將快門改造成TTL信號觸發(fā)。光源選擇CBT-120系列LED光源,如圖7所示分別為R、G、B三個光源,光源時分復用控制采用FPGA芯片實現(xiàn)一個多路脈寬可調,間隔可調的單脈沖發(fā)生器,通過USB to UART的方式在電腦端控制每路控制通道脈寬和相鄰兩路信號之間的間距,實現(xiàn)對相機與三色光源主動照明的時序控制。實驗用打火機產生的火光來當光觸發(fā)源,當R、G、B單色脈沖光源分別在、、三個時刻主動照射到光場相機視場空間并拍攝獲得一幅有效的光場圖像。
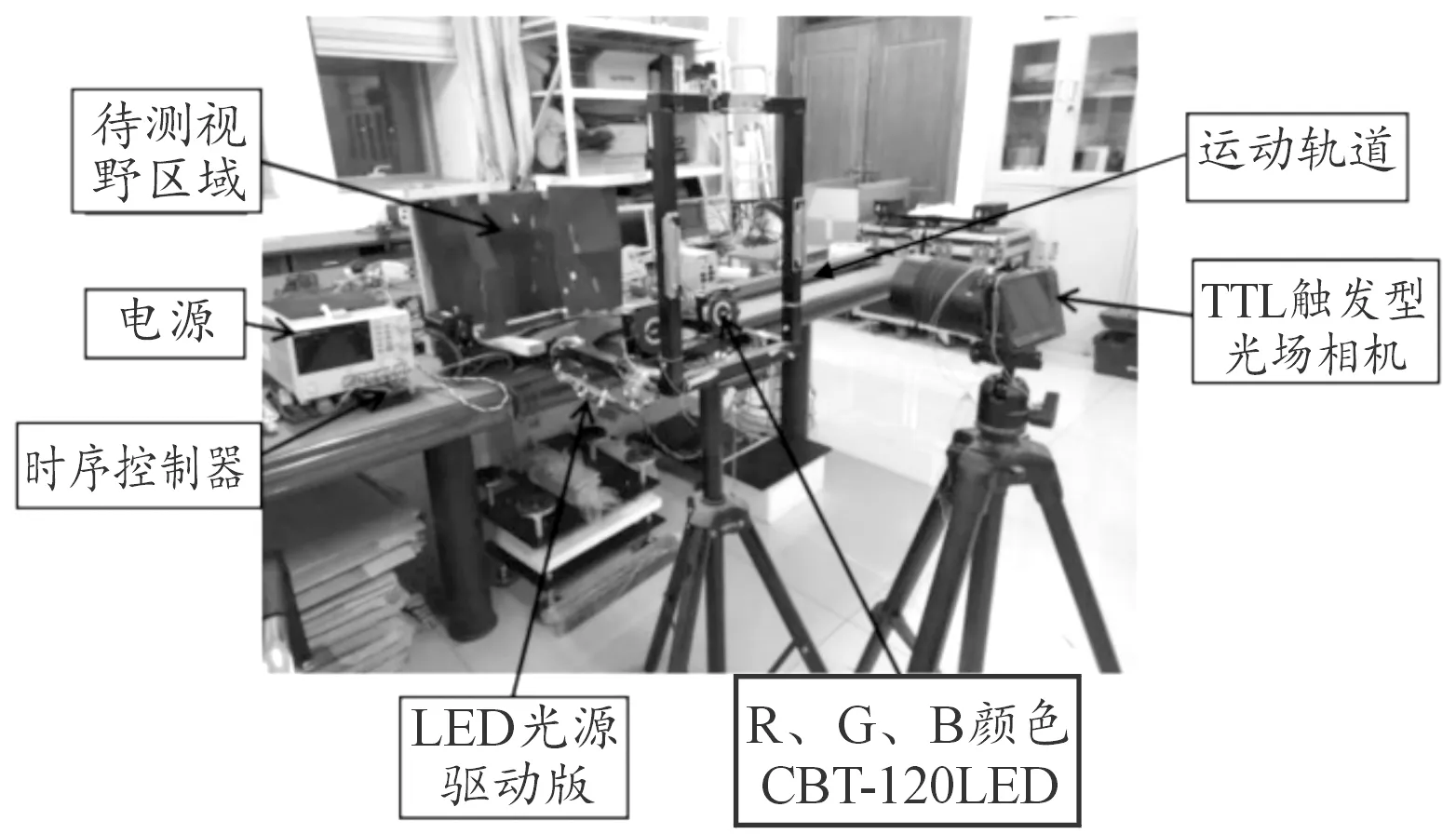
圖6 實驗測試搭建圖Fig.6 Experimental test build diagram

圖7 CBT-120系列LED光源示意圖Fig.7 CBT-120 series LED light source
如圖8所示,得到有效的光場圖像圖8(a)后,通過MATLAB程序解碼解析得到紅光、綠光、藍光分時照明時段內的3幅單色光場圖像圖8(b)、圖8(c)、圖8(d)。該有效的光場圖像圖8(a)能同時體現(xiàn)出3個單色脈沖光源分時照明時運動的物體的在、、時3個空間分布狀態(tài),3張單色圖像分別代表運動物體在、、的空間分布狀態(tài)。因此,在光場相機的單次曝光時間內,可以得到一個物體在3個不同時刻的3個空間分布狀態(tài),因此光場相機成像幅率提高了3倍。
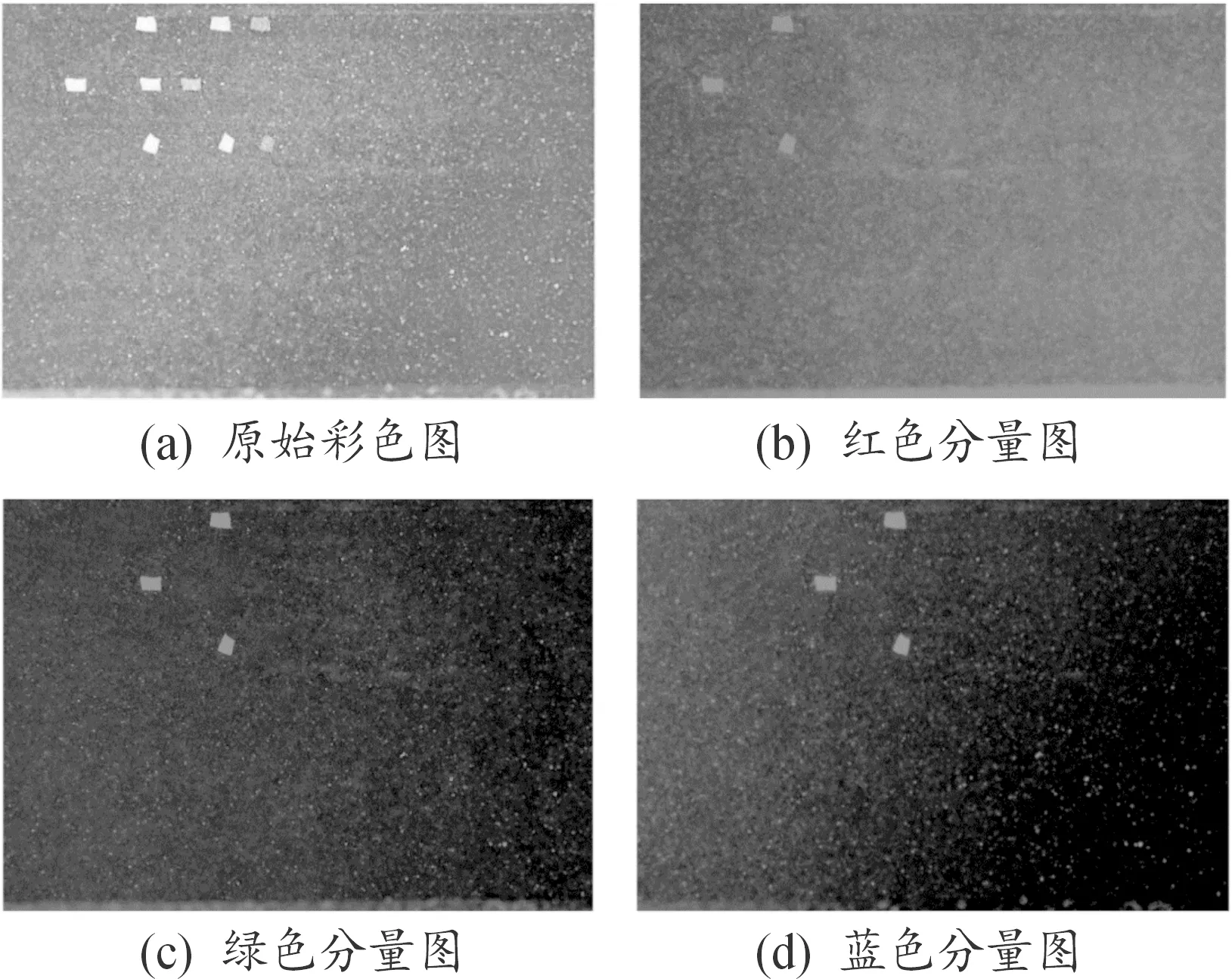
圖8 有效的光場圖像及其單色解析圖Fig.8 A valid light field image and its monochromatic resolution map
5 結論
提出了一種基于LED脈沖光源分時復用的光場相機成像幅率研究的方法,搭建了測試平臺,在光場相機的單次曝光周期內,利用不同高功率窄脈沖LED光源(R、G、B三種光源)對待測的運動目標物進行分時復用主動照明得到單張彩色圖像,將圖像根據(jù)通道分量解析為3幅不同時刻單色圖像,從而光場相機的成像幅率提高了3倍,為利用光場相機測試爆炸場大景深空間多破片高速運動空間分布、速度等多參數(shù)同步測試提高了成像幅率。