一類二次可逆Lotka-Volterra系統(tǒng)的全局相圖
2022-04-02 01:07:22吳澤敏李文仙
肇慶學(xué)院學(xué)報(bào) 2022年2期
關(guān)鍵詞:系統(tǒng)
邵 儀,吳澤敏,李文仙
(肇慶學(xué)院 數(shù)學(xué)與統(tǒng)計(jì)學(xué)院,廣東 肇慶 526061)
1 預(yù)備定理
自上世紀(jì)以來,為解決Hilbert十六問題,平面多項(xiàng)式系統(tǒng)一直是常微分方定性理論和分支理論研究的熱點(diǎn),尤其是平面多項(xiàng)式系統(tǒng)的極限環(huán)個(gè)數(shù)問題,更是分支問題研究的重中之重.研究二次系統(tǒng)的擾動(dòng)系統(tǒng)最多有多少個(gè)極限環(huán)一直是許多學(xué)者研究的熱點(diǎn)問題之一[1-2].利用常微分方定性理論,研究系統(tǒng)在有限平面和無限遠(yuǎn)平面奇點(diǎn)的性質(zhì)、極限環(huán)的存在性與位置,以及過奇點(diǎn)的分界線的去向等,得到系統(tǒng)的全局相圖.通過全局相圖我們可以直觀了解系統(tǒng)的軌線走向和動(dòng)力學(xué)性態(tài),從而為進(jìn)一步研究擾動(dòng)系統(tǒng)的分支等問題提供必要的研究準(zhǔn)備.COLAK I E等[3]研究了具有冪零中心的三次齊次哈密爾頓系統(tǒng)的全局相圖.TIAN Y等[4]研究了關(guān)于y軸對(duì)稱的四次齊次哈密爾頓系統(tǒng)的全局相圖和分支圖.但對(duì)于二次系統(tǒng)到底能有多少種拓?fù)浣Y(jié)構(gòu)互不相同的相圖,至今依然是個(gè)沒有完全解決的問題,需要不斷的補(bǔ)充和完善.
本文將研究一類二次可逆Lotka-Volterra系統(tǒng)[1]

的全局相圖,其中b為參數(shù).利用常微分定性理論,我們將證明這是一類沒有極限環(huán)的二次系統(tǒng).首先我們研究系統(tǒng)在有限平面奇點(diǎn)的拓?fù)浞诸悾缓笱芯克跓o窮遠(yuǎn)點(diǎn)的拓?fù)浣Y(jié)構(gòu),最后在Poincaré緊化盤中得到系統(tǒng)(1.1)有6類不同的拓?fù)涞葍r(jià)相圖.
令z=x+iy,則系統(tǒng)(1.1)可化為:

設(shè)系統(tǒng)(1.2)的線性近似方程為

若(xo,yo)是系統(tǒng)(1.2)的奇點(diǎn),則線性近似方程(1.3)的系數(shù)矩陣為

為了研究系統(tǒng)(1.2)的拓?fù)淙窒鄨D,我們給出下面幾個(gè)預(yù)備定理.
定理1[5]:如果線性近似方程(1.3)系數(shù)矩陣A的特征根實(shí)部非零,且不是重根,那么非線性方程(1.2)在平衡點(diǎn)(xo,yo)附近的軌線與它的線性近似方程(1.3)在原點(diǎn)附近的軌線拓?fù)浣Y(jié)構(gòu)相同,為穩(wěn)定的焦點(diǎn)或者結(jié)點(diǎn)、不穩(wěn)定的焦點(diǎn)或結(jié)點(diǎn)、或鞍點(diǎn).
定理2[6]:(對(duì)稱原理)若原點(diǎn)O是系統(tǒng)(1.3)的中心,且系統(tǒng)(1.2)滿足條件
P(x,-y)=-P(x,y),Q(x,-y)=Q(x,y)或P(-x,y)=P(x,y),Q(-x,y)=-Q(x,y),則原點(diǎn)O也是系統(tǒng)(1.2)的中心.
定理3[7]:具有中心的二次系統(tǒng)不存在極限環(huán).
通過研究系統(tǒng)(1.2)在有限平面和無窮遠(yuǎn)奇點(diǎn)的各種類型,我們得到本文主要結(jié)論為以下定理:
定理:系統(tǒng)(1.2)的全局相圖,有6種不同的拓?fù)浣Y(jié)構(gòu).見圖1至圖6.
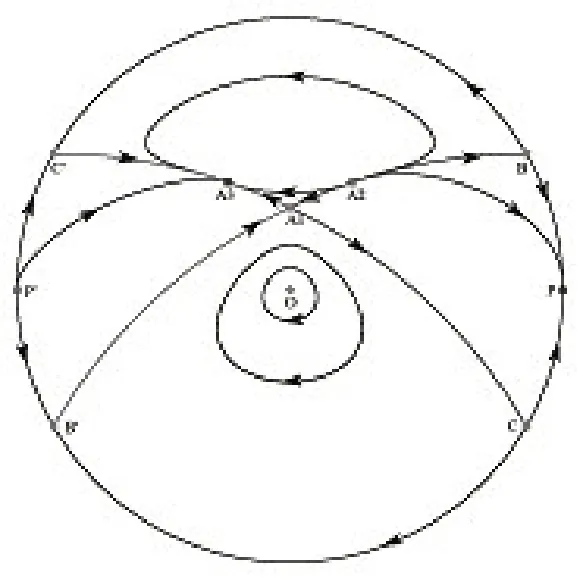
圖1
(2)當(dāng)b>1(或b<-1)時(shí),在有限平面上有一個(gè)中心,三個(gè)鞍點(diǎn).在右(或左)半平面y>0(或y<0)的無窮遠(yuǎn)處有一個(gè)穩(wěn)定結(jié)點(diǎn),兩個(gè)不穩(wěn)定結(jié)點(diǎn),對(duì)應(yīng)在左半平面y<0(或y>0)的無窮遠(yuǎn)處有一個(gè)不穩(wěn)定結(jié)點(diǎn),兩個(gè)穩(wěn)定結(jié)點(diǎn),相圖見圖2;
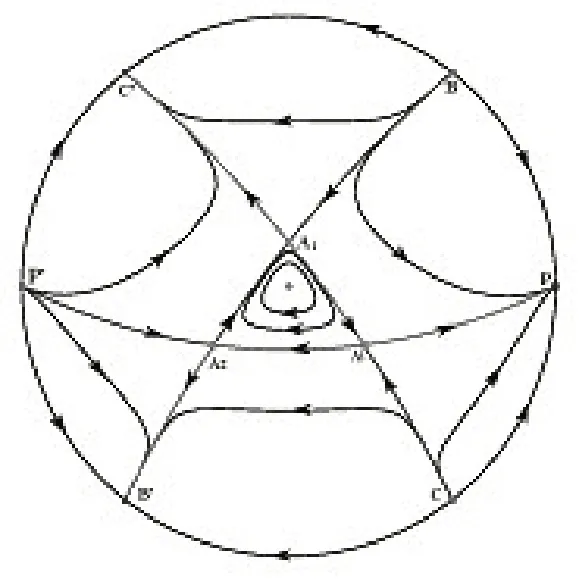
圖2 b >1
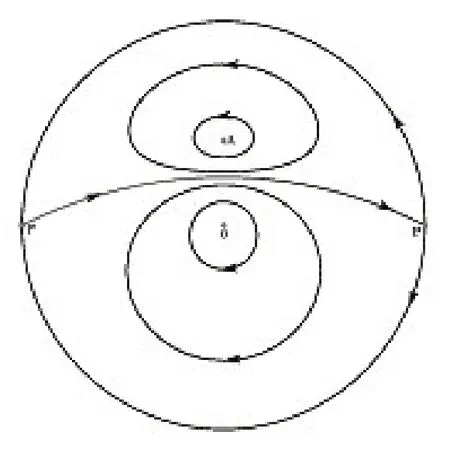
圖3
(4)當(dāng)b=1時(shí),在有限平面上有一個(gè)中心,一個(gè)鞍點(diǎn).在右半平面y>0 的無窮遠(yuǎn)處有一個(gè)穩(wěn)定結(jié)點(diǎn),兩個(gè)半雙曲奇點(diǎn)為鞍結(jié)點(diǎn),在左半平面y<0 的無窮遠(yuǎn)處對(duì)應(yīng)一個(gè)不穩(wěn)定結(jié)點(diǎn),兩個(gè)鞍結(jié)點(diǎn),相圖見圖4;
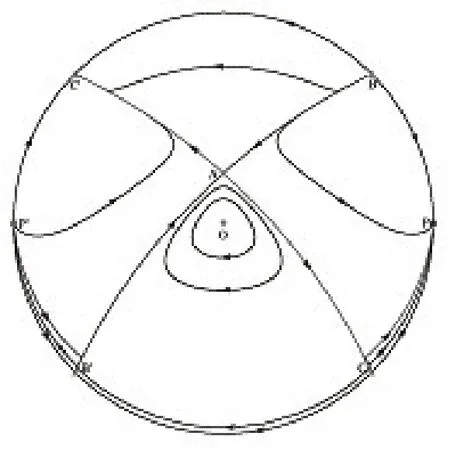
圖4 b=1
(5)當(dāng)b=-1時(shí),在有限平面上只有一個(gè)中心.在右半平面y>0 的無窮遠(yuǎn)處有一個(gè)半雙曲鞍點(diǎn),在左半平面y<0 的無窮遠(yuǎn)處對(duì)應(yīng)一個(gè)半雙曲鞍點(diǎn),在y軸正半軸的無窮遠(yuǎn)處有一個(gè)冪零奇點(diǎn),在y軸負(fù)半軸的無窮遠(yuǎn)處對(duì)應(yīng)有一個(gè)冪零奇點(diǎn),相圖見圖5;
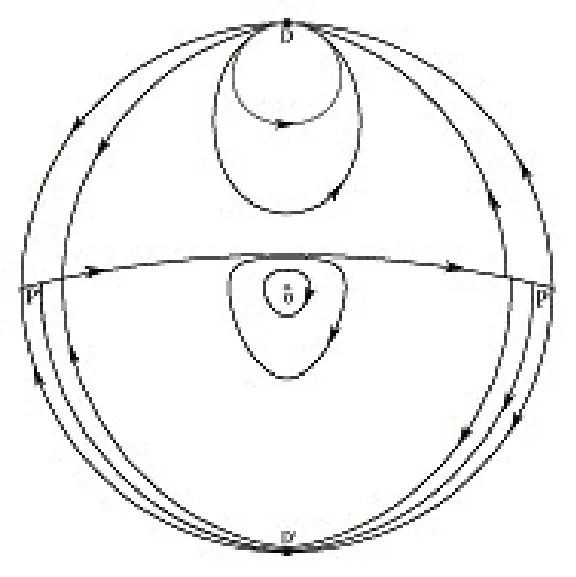
圖5 b=-1
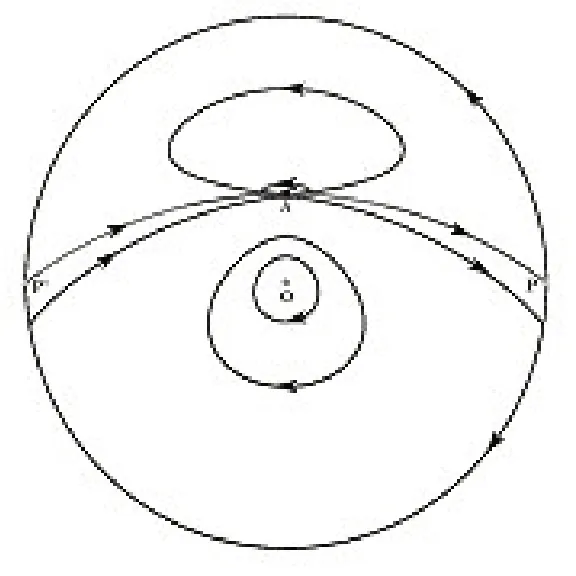
圖6 b=1/3
2 有限平面奇點(diǎn)及性態(tài)
這部分我們主要研究系統(tǒng)(1.2)在有限平面的奇點(diǎn)類型、穩(wěn)定性以及它們附近的軌線性態(tài),為此我們有下面的引理.
引理1:在有限平面,系統(tǒng)(1.2)的奇點(diǎn)類型及性態(tài)如下:
(2)當(dāng)b>1(或b<-1)時(shí),系統(tǒng)也有四個(gè)奇點(diǎn),分別是中心O(0,0),鞍點(diǎn)
(4)當(dāng)b=1時(shí),有兩個(gè)奇點(diǎn),分別是中心O(0,0)和鞍點(diǎn)
(5)當(dāng)b=-1時(shí),僅有一個(gè)奇點(diǎn)O(0,0)是中心;
證明:應(yīng)用常微分方程定性理論,設(shè)系統(tǒng)(1.2)的奇點(diǎn)為(xo,yo),則系統(tǒng)(1.2)在(xo,yo)處的線性近似方程(1.3)的系數(shù)矩陣為

令系統(tǒng)(1.2)中的P(x,y=Q(x,y)=0,容易得到當(dāng)<b<1,或b>1,或b<-1 時(shí),系統(tǒng)(1.2)有四個(gè)奇點(diǎn)和;當(dāng)時(shí),系統(tǒng)(1.2)有兩個(gè)奇點(diǎn)O(0,0)和;當(dāng)b=1 時(shí),有兩個(gè)奇點(diǎn)O(0,0)和;當(dāng)b=-1 時(shí),系統(tǒng)(1.2)僅有一個(gè)奇點(diǎn)O(0,0);當(dāng)時(shí),有兩個(gè)奇點(diǎn)中心O(0,0)和.
對(duì)于奇點(diǎn)O,易知b取任意實(shí)數(shù),O都是系統(tǒng)(1.3)的奇點(diǎn),系數(shù)矩陣(2.1)的特征值為i和-i,所以O(shè)是此線性近似方程(1.3)的中心.又因?yàn)橄到y(tǒng)(1.2)滿足P(-x,y)=P(x,y),Q(-x,y)=-Q(x,y),所以由對(duì)稱原理定理2可知,原點(diǎn)O也是系統(tǒng)(1.2)的中心.下面我們分情況討論除O(0,0)外其他奇點(diǎn)的情形.
(2)當(dāng)b>1或b<-1時(shí),易求得奇點(diǎn)A1,A2和A3的特征值與(i)的相等,但由于的取值范圍不同,所以三個(gè)奇點(diǎn)對(duì)應(yīng)系數(shù)矩陣(2.4)的特征值均為異號(hào)實(shí)根,故奇點(diǎn)A1,A2和A3都是系統(tǒng)(1.2)的鞍點(diǎn).
令ξ=x,η=則有

因?yàn)?/p>

由對(duì)稱原理可知,原點(diǎn)是系統(tǒng)(2.2)的中心,故A也是原系統(tǒng)(1.2)的中心.
(4)當(dāng)b=1 時(shí),易求得奇點(diǎn)對(duì)應(yīng)的系數(shù)矩陣(2.1)的特征值為λ=-+1,故A是原系統(tǒng)(1.2)的鞍點(diǎn).
(5)當(dāng)b=-1情形,只有一個(gè)中心奇點(diǎn)O(0,0),上述已證.

系統(tǒng)(1.2)化為系統(tǒng)

由y+P2(x,y)=0 解得隱函數(shù)
并且


由文獻(xiàn)[8]的定理7.2及坐標(biāo)變換(2.3)可知,奇點(diǎn)的鄰域由一個(gè)橢圓扇形與一個(gè)雙曲扇形組成,并且橢圓扇形在雙曲扇形的上方.
這樣我們就完成了系統(tǒng)(1.2)在有限平面上所有奇點(diǎn)性態(tài)的分析.
引理2:系統(tǒng)(1.2)是沒有極限環(huán)的系統(tǒng).
證明:由引理1的證明知道,不論b取何值,系統(tǒng)(1.2)都有一個(gè)奇點(diǎn)是中心O,由定理3,系統(tǒng)(1.2)沒有極限環(huán).
3 無限遠(yuǎn)奇點(diǎn)及性態(tài)
這部分我們將通過運(yùn)用Poincaré變換,研究系統(tǒng)(1.2)在無窮遠(yuǎn)處的奇點(diǎn)類型以及軌線性態(tài),為此我們有如下引理.
引理3:在無限遠(yuǎn)處,系統(tǒng)(1.2)的奇點(diǎn)性態(tài)為
(2)當(dāng)b>1(或b<-1)時(shí),系統(tǒng)(1.2)有三個(gè)奇點(diǎn),分別是穩(wěn)定(或不穩(wěn)定)結(jié)點(diǎn)P(0,0),不穩(wěn)定(或穩(wěn)定)結(jié)點(diǎn)
(4)當(dāng)b=1 時(shí),系統(tǒng)有三個(gè)奇點(diǎn),分別是穩(wěn)定非正常結(jié)點(diǎn)P(0,0),半雙曲的鞍結(jié)點(diǎn)B(1,0)和C(-1,0),B點(diǎn)和C點(diǎn)鄰域的軌線由一個(gè)拋物扇形與兩個(gè)雙曲扇形組成,B點(diǎn)的拋物扇形在Poincaré圓盤內(nèi),而C點(diǎn)的兩個(gè)雙曲扇形在Poincaré圓盤內(nèi);
(5)當(dāng)b=-1時(shí),系統(tǒng)(1.2)有兩個(gè)奇點(diǎn),分別是半雙曲鞍點(diǎn)P(0,0)以及y軸正半軸上的冪零奇點(diǎn)D(0,0),D的鄰域的軌線由一個(gè)橢圓扇形與一個(gè)雙曲扇形組成,且橢圓扇形在圓盤內(nèi),而對(duì)應(yīng)y軸負(fù)半軸上的橢圓扇形不在圓盤內(nèi).
證明:我們先求系統(tǒng)(1.2)在x-y平面除y軸上的兩個(gè)無窮遠(yuǎn)點(diǎn)以外的無窮遠(yuǎn)點(diǎn)的情況.為此作Poincaré變換,令,即,將系統(tǒng)(1.2)化為u-z平面上的方程組

令z=0,系統(tǒng)(3.1)在u軸上的奇點(diǎn),即滿足(1-3b)u+(b+1)u3=0.容易解出當(dāng)和b<-1時(shí),系統(tǒng)(3.1)在u軸上有三個(gè)奇點(diǎn);當(dāng)時(shí),系統(tǒng)(3.1)在u軸上只有一個(gè)奇點(diǎn)P(0,0);當(dāng)b=1時(shí),系統(tǒng)(3.1)在u軸上有三個(gè)奇點(diǎn)P(0,0),B(1,0)和C(-1,0).
易求得系統(tǒng)(3.1)的線性近似方程組的系數(shù)矩陣為

(2)當(dāng)b>1 或b<-1 時(shí),奇點(diǎn)P,B,C的特征值與情形(i)相等.容易看出當(dāng)b>1 時(shí),P點(diǎn)的兩個(gè)特征值為相異的負(fù)實(shí)根,B點(diǎn)和C點(diǎn)的兩個(gè)特征值為相異的正實(shí)根,而當(dāng)b<-1 時(shí),奇點(diǎn)P,B,C的特征值與b>1 的特征值符號(hào)正好相反.因此當(dāng)b>1 時(shí),P是穩(wěn)定結(jié)點(diǎn)、B點(diǎn)和C點(diǎn)均為不穩(wěn)定結(jié)點(diǎn);當(dāng)b<-1 時(shí),P是不穩(wěn)定結(jié)點(diǎn)、B點(diǎn)和C點(diǎn)均為穩(wěn)定結(jié)點(diǎn).
(4)當(dāng)b=1 時(shí),易求得P(0,0)的兩個(gè)特征值相等是-2,因此P是穩(wěn)定非正常結(jié)點(diǎn).而B點(diǎn)和C點(diǎn)的特征值為4 和0,屬于高階奇點(diǎn),這種情形較為復(fù)雜.我們先討論B點(diǎn)的情形.為此我們先做坐標(biāo)變換u→u-1,z→z,將B點(diǎn)平移到u-z平面的原點(diǎn),方程組(3.1)變?yōu)?/p>

為了確定高階奇點(diǎn)B的類型,我們?cè)僮鲎鴺?biāo)變換

將方程組(3.3)化為

應(yīng)用文獻(xiàn)[8]的定理7.1,系統(tǒng)在奇點(diǎn)O(0,0)的充分小鄰域內(nèi),解析函數(shù)?(xˉ)=0 滿足?(xˉ)+Q2(xˉ,?(xˉ))≡0.令,所以O(shè)(0,0)是鞍結(jié)點(diǎn),O點(diǎn)鄰域的軌線由分別沿著y正半軸和負(fù)半軸進(jìn)入O點(diǎn)的兩條分界線分成兩部分,一部分是拋物扇形,一部分是兩個(gè)雙曲扇形,而且拋物扇形在xˉ-yˉ平面的右半平面.方程組(3.4)與(3.1)是拓?fù)涞葍r(jià)的,故高階奇點(diǎn)B也是鞍結(jié)點(diǎn),其鄰域的軌線拓?fù)涞葍r(jià)于O點(diǎn)鄰域的軌線性態(tài).由坐標(biāo)變換可知,xˉ-yˉ平面的右半平面對(duì)應(yīng)方程組(3.1)z>0,故拋物扇形在Poincaré圓盤內(nèi).
高階奇點(diǎn)C的情形與B點(diǎn)討論類似,我們直接做坐標(biāo)變換

方程組(3.1)變?yōu)?/p>

同時(shí)將C點(diǎn)平移到了原點(diǎn).同樣應(yīng)用文獻(xiàn)[8]的定理7.1,解析函數(shù)滿足≡0,,即,即O(0,0)也是鞍結(jié)點(diǎn),O點(diǎn)鄰域的軌線分成兩部分,一部分是拋物扇形,一部分是兩個(gè)雙曲扇形,而且兩個(gè)雙曲扇形在?平面的右半平面.由于方程組(3.5)與(3.1)也是拓?fù)涞葍r(jià)的,故高階奇點(diǎn)C也是鞍結(jié)點(diǎn),即為半雙曲奇點(diǎn),其鄰域的軌線拓?fù)涞葍r(jià)于O點(diǎn)鄰域的軌線性態(tài).由上述坐標(biāo)變換可知,?平面的右半平面對(duì)應(yīng)方程組(3.1)z>0,故兩個(gè)雙曲扇形在Poincaré圓盤內(nèi).
(5)當(dāng)b=-1 時(shí),易求得P(0,0)的兩個(gè)特征值為4 和0,也屬于高階奇點(diǎn).與(4)中B點(diǎn)的討論情形類似,不難求得坐標(biāo)變換
將方程組(3.1)變?yōu)橐韵路匠探M

應(yīng)用文獻(xiàn)[8]的定理7.1,方程組(3.6)在P(0,0)的小鄰域內(nèi)存在解析函數(shù)滿足令,即,所以P(0,0)是半雙曲鞍點(diǎn).

將方程組(3.1)變?yōu)榉匠探M

由文獻(xiàn)[8]的定理7.1,方程組(3.7)在P(0,0)的小鄰域內(nèi),解析函數(shù)=0 滿足?(x)+Q2(x,?(x))≡0.令,即m=3,am=-1 <0,所以P(0,0)是半雙曲鞍點(diǎn).
接下來研究y軸上的兩個(gè)無窮遠(yuǎn)點(diǎn).運(yùn)用Poincaré變換,即,將系統(tǒng)(1.2)變換為ν-z平面上的方程組:

只要研究方程組(3.8)在點(diǎn)(v,z)=(0,0)附近的情況,就可以確定系統(tǒng)(1.2)在x-y平面上y軸方向的兩個(gè)無窮遠(yuǎn)點(diǎn)的情況.
當(dāng)方程組(3.8)滿足(v,z)=(0,0)時(shí),只有b=-1,這時(shí)方程組(3.8)簡(jiǎn)化為

方程組(3.9)的線性近似方程組的系數(shù)矩陣為

容易求得奇點(diǎn)D(0,0)處的兩個(gè)特征值均為0.應(yīng)用文獻(xiàn)[8]的定理7.2,容易求得方程組(3.9)存在隱函數(shù)z=?(ν)=4ν2+4ν4+O(ν6)滿足z+P(ν,z)=0,并有

即

故D(0,0)的鄰域軌線由一個(gè)橢圓扇形和一個(gè)雙曲扇形組成,且在ν-z平面中,橢圓扇形在雙曲扇形的上方.由于z>0 對(duì)應(yīng)Poincaré圓盤y>0 在圓內(nèi)部分,因此橢圓扇形在圓盤內(nèi).至此,我們完成了引理3的證明.
定理的證明:結(jié)合引理1和引理3,我們就證明了二次可逆Lotka-Volterra 系統(tǒng)z?=-iz+z2+bzˉ2在有限平面和無窮遠(yuǎn)處的奇點(diǎn)類型及軌線性態(tài).綜合分析就可以畫出二次可逆Lotka-Volterra 系統(tǒng)z?= -iz+z2+bzˉ2當(dāng)參數(shù)b各種取值范圍的全局相圖.需要注意的是b>1 和b<-1 的全局相圖是拓?fù)涞葍r(jià)的,我們只需要運(yùn)用坐標(biāo)變換(x,y,t)→(-x,-y,t),一種情形的相圖就拓?fù)涞葍r(jià)于另一種情形的相圖.
4 結(jié)語(yǔ)
通過利用微分方程定性理論,對(duì)一類二次可逆Lotka-Volterra 系統(tǒng)在有限平面及無窮遠(yuǎn)平面的初等奇點(diǎn)、半雙曲奇點(diǎn)以及冪零奇點(diǎn)進(jìn)行了研究,得到了6類拓?fù)涞葍r(jià)的全局相圖.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32

- 肇慶學(xué)院學(xué)報(bào)的其它文章
- 基于感覺統(tǒng)合訓(xùn)練的智障兒童體育游戲調(diào)整與設(shè)計(jì)
- 師范認(rèn)證背景下田徑課程建設(shè)面臨的問題及對(duì)策
——以肇慶學(xué)院為例 - 微(納)米塑料介導(dǎo)下多環(huán)芳烴的毒性效應(yīng)研究進(jìn)展
- 地方應(yīng)用型高校應(yīng)用統(tǒng)計(jì)學(xué)重點(diǎn)專業(yè)建設(shè)研究
——以肇慶學(xué)院為例 - 應(yīng)用型本科院校數(shù)值分析教學(xué)改革與課程思政
- 基于機(jī)器學(xué)習(xí)的丙型肝炎肝纖維化預(yù)測(cè)算法對(duì)比研究