軟剛臂單點(diǎn)系泊系統(tǒng)靜力特性分析
2022-04-02 05:56:28孫麗萍馬榮太王宏偉
海洋工程 2022年2期
李 鵬,孫麗萍, 2,馬 剛, 2, 3,馬榮太,王宏偉, 2
(1.哈爾濱工程大學(xué) 船舶工程學(xué)院,黑龍江 哈爾濱 150001; 2.工業(yè)和信息化部深海工程裝備與技術(shù)重點(diǎn)試驗(yàn)室,黑龍江 哈爾濱 150001; 3.哈爾濱工程大學(xué)煙臺(tái)研究院,山東 煙臺(tái) 265501; 4.中海油研究總院有限責(zé)任公司,北京 100028)
單點(diǎn)系泊(single point mooring,簡(jiǎn)稱SPM)指允許船舶隨著盛行風(fēng)和海況的變化,圍繞著單個(gè)系泊點(diǎn)自由回轉(zhuǎn),從而處于風(fēng)、浪、流合阻力最小位置的系泊方式。與多點(diǎn)系泊方式相比,單點(diǎn)系泊的顯著特點(diǎn)是“點(diǎn)”系泊,船體像風(fēng)向標(biāo)一樣轉(zhuǎn)動(dòng),即風(fēng)向標(biāo)效應(yīng),大幅減小了風(fēng)力和海流力對(duì)船體運(yùn)動(dòng)的影響。其中,軟剛臂系泊系統(tǒng)是眾多單點(diǎn)系泊形式的一種[1]。
軟剛臂起源于單錨腿系泊系統(tǒng),單錨腿系泊系統(tǒng)的主要構(gòu)件是一個(gè)大浮筒,它漂浮在海面上,下端連接海底,上端則與船體相連。后來(lái)浮筒演化成一個(gè)柱狀的浮力艙直接固定在海底,縮小了船體運(yùn)動(dòng)半徑,也避免了浮筒隨著海面升沉對(duì)自身和其他相關(guān)設(shè)備造成破壞。經(jīng)過(guò)進(jìn)一步發(fā)展,連系著船體的繩索逐漸演化成為剛臂(剛性桁架),這種剛臂使船體和浮筒保持了恒定的距離,避免了碰撞;同時(shí),也避免了繩索突然被拉直時(shí)的巨大沖擊力。
經(jīng)過(guò)不斷完善過(guò)后,簡(jiǎn)單的剛臂形式演化成為現(xiàn)在的柔性多體結(jié)構(gòu),其由系泊腿(主要采用錨鏈)和剛臂(剛性軛架)組成,并通過(guò)單軸鉸或雙軸鉸連接在一起。與單純的剛臂形式相比,船體向單點(diǎn)塔方向運(yùn)動(dòng)時(shí),這種多體結(jié)構(gòu)允許船體有更多的相對(duì)運(yùn)動(dòng),減小了剛臂與船體的直接作用,增加了緩沖。因此,相對(duì)剛臂系泊,這種剛?cè)岫囿w結(jié)構(gòu)形式叫做軟剛臂系泊,軟剛臂系泊系統(tǒng)的示意如圖1所示。以軟剛臂是否處于水中分為水下軟剛臂[2]和水上軟剛臂。
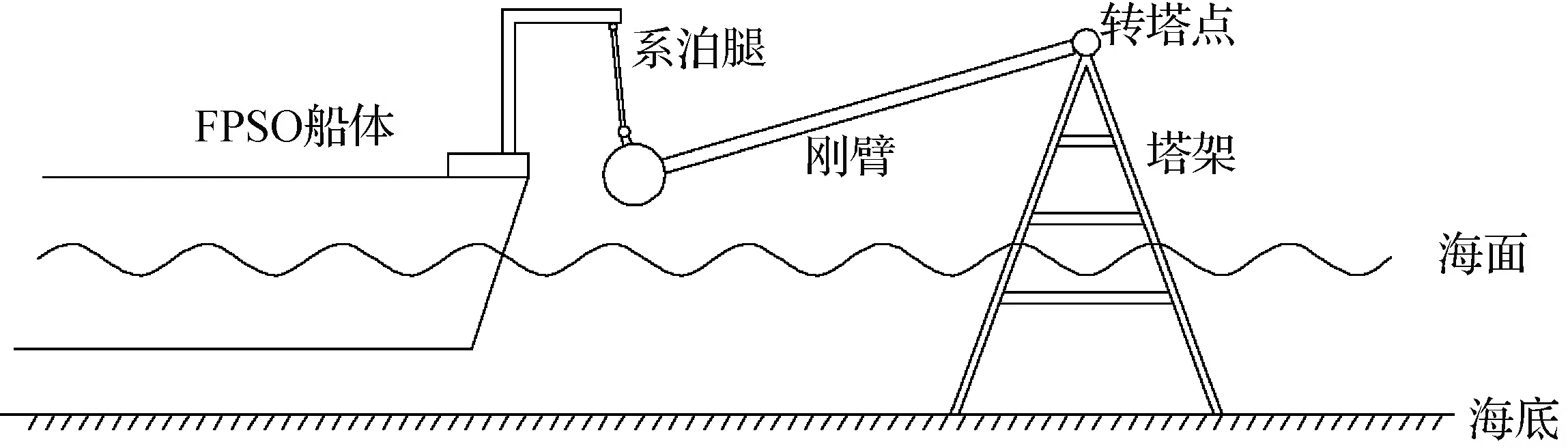
圖1 軟剛臂系泊系統(tǒng)整體示意
水上軟剛臂系泊靜力特性曲線光順平滑、沒(méi)有大幅沖擊。同時(shí),除了結(jié)構(gòu)形式的演化,原來(lái)的浮力艙演化成了重力壓載。這種系泊方式可以極大程度地避免浮力艙受到波浪的作用力使得浮力艙自身運(yùn)動(dòng),從而導(dǎo)致結(jié)構(gòu)失穩(wěn)。相比之下,重力由質(zhì)量結(jié)構(gòu)來(lái)提供,更加穩(wěn)定。水上軟剛臂完全離開(kāi)海面,不會(huì)受到海水的直接作用。因此對(duì)于淺海以及極淺海等海洋環(huán)境來(lái)說(shuō),軟剛臂系泊系統(tǒng)是一種較為可靠的選擇。
數(shù)值計(jì)算和模型試驗(yàn)是軟剛臂分析中的主要手段。Xiao等[3]針對(duì)安裝在淺水區(qū)域的軟剛臂FPSO開(kāi)展了數(shù)值和模型試驗(yàn)研究,探究了水深對(duì)于軟剛臂系泊力的影響。通過(guò)建立具有基本動(dòng)力特性的理論模型,開(kāi)發(fā)數(shù)值計(jì)算程序,利用試驗(yàn)數(shù)據(jù)開(kāi)展了對(duì)比驗(yàn)證。雷慧等[4]針對(duì)渤海海域FPSO,利用多體動(dòng)力學(xué)的方法,應(yīng)用AQWA軟件研究了水深變化對(duì)FPSO水動(dòng)力參數(shù)的影響。金峰等[5]針對(duì)軟剛臂單點(diǎn)系泊系統(tǒng)建立了一套多體動(dòng)力學(xué)模型,采用保辛數(shù)值積分方法,對(duì)FPSO的系泊響應(yīng)及其系泊回復(fù)力開(kāi)展了研究工作。Lyu等[6]基于多體動(dòng)力學(xué)理論研究開(kāi)發(fā)了一套具有7個(gè)獨(dú)立自由度的多體動(dòng)力學(xué)數(shù)學(xué)模型。Tang等[7]針對(duì)某軟剛臂式FPSO監(jiān)測(cè)數(shù)據(jù)的非平穩(wěn)性,提出了一種基于非平穩(wěn)響應(yīng)數(shù)據(jù)的無(wú)結(jié)構(gòu)響應(yīng)構(gòu)造方法,分析了該單點(diǎn)系泊結(jié)構(gòu)模態(tài)參數(shù)的分布。樊哲良等[8]從應(yīng)變、位移和運(yùn)動(dòng)姿態(tài)3個(gè)方面對(duì)渤海某FPSO的系泊力進(jìn)行了討論。蘇方磊等[9]利用模型試驗(yàn)方法對(duì)水上軟剛臂系泊FPSO的運(yùn)動(dòng)特性進(jìn)行了探究。
優(yōu)化算法和人工智能技術(shù)也在軟剛臂的研究中起到積極推動(dòng)作用。Lyu等通過(guò)數(shù)值模型和大尺度試驗(yàn)的方式,結(jié)合優(yōu)化算法,對(duì)軟剛臂鉸接頭的損傷進(jìn)行了識(shí)別[10-11]。趙梓舒[12]采用Adams軟件開(kāi)展了軟剛臂有限元模擬,采用堆棧稀疏自編碼網(wǎng)絡(luò)對(duì)軟剛臂系泊系統(tǒng)鉸接點(diǎn)損傷開(kāi)展了識(shí)別分析。韓宇等[13]采用深度學(xué)習(xí)中的LSTM方法對(duì)軟剛臂系泊力的預(yù)測(cè)方法進(jìn)行研究。
針對(duì)軟剛臂系泊系統(tǒng)的研究大多是針對(duì)其動(dòng)力性能進(jìn)行的,這種方法可以探究軟剛臂系泊系統(tǒng)的性能能否達(dá)到最優(yōu)化。水上軟剛臂系統(tǒng)不受流體載荷影響,靜力分析是快速評(píng)估其系泊力的重要手段。因此在設(shè)計(jì)之初需要對(duì)軟剛臂系統(tǒng)的靜力特性進(jìn)行分析,這樣可以對(duì)設(shè)計(jì)出來(lái)的結(jié)構(gòu)進(jìn)行受力和強(qiáng)度的評(píng)估。此外,靜力特性分析可以求解軟剛臂的靜力剛度情況,能夠?yàn)檐泟偙蹌?dòng)力分析打好基礎(chǔ)。范模[14]從系泊特性計(jì)算的角度對(duì)軟剛臂系統(tǒng)進(jìn)行了靜力受力分析。李欣等[15]針對(duì)軟剛臂系泊系統(tǒng)進(jìn)行了靜力分析,得到了縱向以及垂向的剛度曲線,為模型試驗(yàn)提供了校驗(yàn)依據(jù)。胡勇等[16]針對(duì)塔架軟剛臂單點(diǎn)系泊系統(tǒng)進(jìn)行了靜力分析,得到了FPSO縱向運(yùn)動(dòng)時(shí)的系統(tǒng)剛度。然而FPSO軟剛臂系統(tǒng)的形式多種多樣,同一種分析方法無(wú)法做到適合所有類型的軟剛臂系統(tǒng)。
針對(duì)某FPSO軟剛臂系泊系統(tǒng)進(jìn)行研究,形成了一套壓載艙式水上軟剛臂單點(diǎn)系泊系統(tǒng)二維靜力平衡計(jì)算方法,通過(guò)這一方法可以解析計(jì)算分析軟剛臂上各點(diǎn)處受力情況,并能夠用來(lái)對(duì)商業(yè)軟件的靜力分析結(jié)果進(jìn)行驗(yàn)證和校核。文中選取了某FPSO壓載以及滿載工況,通過(guò)Fortran編程對(duì)理論公式進(jìn)行計(jì)算分析,并與OrcaFlex等商業(yè)軟件的數(shù)值模擬結(jié)果、試驗(yàn)結(jié)果進(jìn)行分析和比較,對(duì)靜力分析結(jié)果進(jìn)行了驗(yàn)證。
1 軟剛臂系泊系統(tǒng)的基本結(jié)構(gòu)
研究對(duì)象為某FPSO塔式軟剛臂單點(diǎn)系泊系統(tǒng)。軟剛臂結(jié)構(gòu)分為:系泊腿、YOKE(即剛臂、剛性軛架)和轉(zhuǎn)塔3個(gè)部分。系泊腿為對(duì)稱結(jié)構(gòu),上端與船體相連,下端連接YOKE;YOKE連接著轉(zhuǎn)塔和系泊腿,在轉(zhuǎn)塔上有3個(gè)自由度。YOKE和系泊腿的示意如圖2和圖3所示。

圖2 YOKE俯視圖
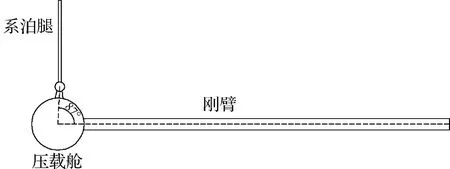
圖3 系泊腿和YOKE的側(cè)視圖
2 軟剛臂系統(tǒng)二維靜力平衡理論
2.1 軟剛臂二維靜力平衡理論的假設(shè)
在分析FPSO系泊系統(tǒng)在波浪作用下的運(yùn)動(dòng)響應(yīng)時(shí),引入如下基本假設(shè):1)剛體假設(shè),F(xiàn)PSO為剛體,會(huì)產(chǎn)生6個(gè)自由度的運(yùn)動(dòng);2)軟剛臂兩條系泊腿平行,且二者運(yùn)動(dòng)也完全相同,這樣可以保證兩條系泊腿關(guān)于同一平面對(duì)稱;3)海底不可變形和滲透。基于以上假設(shè),在分析的過(guò)程中,將兩條系泊腿轉(zhuǎn)化到某一平面內(nèi),從而將整個(gè)軟剛臂系泊系統(tǒng)由三維狀態(tài)簡(jiǎn)化為二維平面模型,方便對(duì)其進(jìn)行受力分析。
2.2 軟剛臂二維靜力平衡理論
進(jìn)一步從軟剛臂的結(jié)構(gòu)特點(diǎn)和受力特性進(jìn)行分析。首先對(duì)軟剛臂結(jié)構(gòu)進(jìn)行拆分,在系泊腿鉸接處,按照此處無(wú)彎矩、作用力與反作用力相等的原則,將軟剛臂整體結(jié)構(gòu)的受力(圖4)拆分成系泊腿受力分析(圖5)、YOKE和壓載艙等附屬結(jié)構(gòu)的受力分析(圖6)。
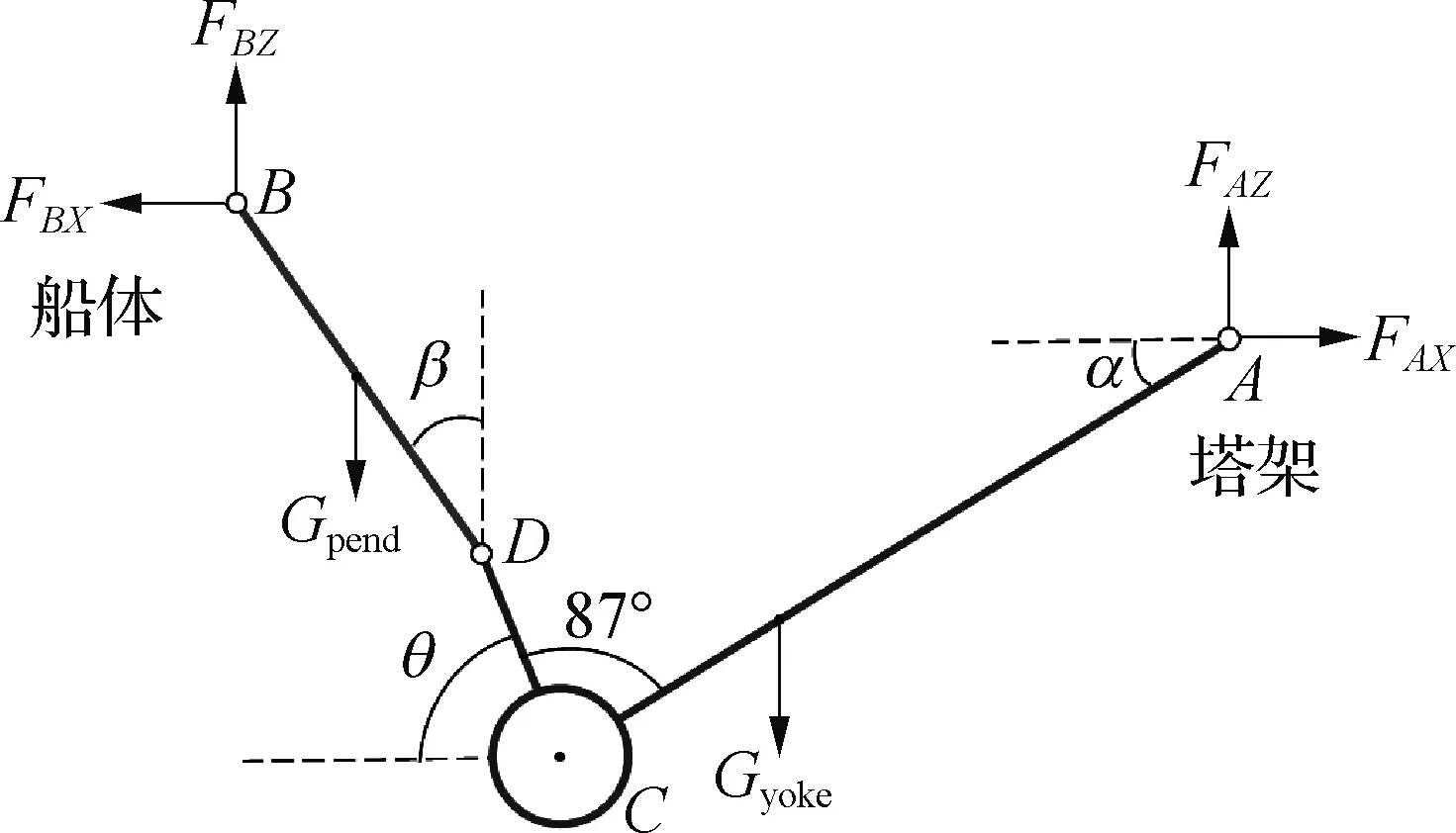
圖4 整體結(jié)構(gòu)受力分析簡(jiǎn)化圖

圖5 系泊腿受力分析簡(jiǎn)化圖

圖6 YOKE受力分析簡(jiǎn)化圖
對(duì)于圖4,以系泊腿上端點(diǎn)B為中心取矩,根據(jù)受力平衡可得:
(1)
對(duì)于圖5,以YOKE連接點(diǎn)A為中心取矩,根據(jù)受力平衡可得:
(2)
式中:Gpend為系泊腿的重力,Gyoke為YOKE連同壓載艙的重力,F(xiàn)V為系泊腿下端點(diǎn)處的垂向受力大小,F(xiàn)H為系泊腿下端點(diǎn)處的水平向受力大小,F(xiàn)BZ為系泊腿上端點(diǎn)處的垂向受力大小,F(xiàn)BX為系泊腿上端點(diǎn)處的水平向受力大小,F(xiàn)AZ為YOKE與塔架連接點(diǎn)處的垂向受力大小,F(xiàn)AX為YOKE與塔架連接點(diǎn)處的水平向受力大小;LBD為系泊腿的長(zhǎng)度,Lkg為YOKE連同壓載艙重心距A點(diǎn)的長(zhǎng)度,LAC為壓載艙中心距YOKE頭的長(zhǎng)度,LCD為壓載艙中心到系泊腿下端點(diǎn)的距離;α為YOKE與水平方向的夾角,β為系泊腿BD與垂直方向的夾角,θ為系泊腿下端點(diǎn)D到壓載艙中心C點(diǎn)的水平方向夾角。取含有FV和FH的兩個(gè)式子如下:
(3)
將式(3)整理得:
(4)
根據(jù)已知條件,有如下關(guān)系:
Lkg=LAC-rtk
(5)
式中:rtk為壓載艙的半徑;這里選取的軟剛臂結(jié)構(gòu)中∠ACD=87°,即θ=180°-87°-α;LCD的長(zhǎng)度是一個(gè)固定值。通過(guò)式(4)和式(5)中的已知條件可以求得YOKE連接點(diǎn)A和系泊腿上端點(diǎn)B在X方向和Z方向上的力:
(6)
每條系泊腿上端的張力大小Tpend為:
(7)
這樣,通過(guò)式(4)、式(6)和式(7)可以得出:1)已知θ的大小即可求出水平方向的夾角α的值;2)給定α、β可得出系泊腿上端點(diǎn)處(以及塔架上端點(diǎn))水平和垂直方向力的大小;3)系泊腿的張力可以由系泊腿頂部B點(diǎn)處的水平和垂向力推導(dǎo)求出。
3 軟剛臂靜力特性計(jì)算
3.1 軟剛臂OrcaFlex模型
利用OrcaFlex軟件實(shí)現(xiàn)軟剛臂系統(tǒng)靜態(tài)的分析過(guò)程。其中,軟剛臂系統(tǒng)在OrcaFlex軟件中的主視圖如圖7所示。在OrcaFlex軟件建立FPSO系泊耦合模型過(guò)程中,F(xiàn)PSO船體用Vessel單元模擬,船體支架使用不考慮質(zhì)量的6D Buyo單元模擬,支架質(zhì)量和重心已經(jīng)包含在FPSO船體中,系泊系統(tǒng)的左右系泊腿用Line模型,軟剛臂用6D Buyo單元模擬,塔架使用6D Buyo單元、Shape單元和Constraint單元模擬,在文中塔架不考慮質(zhì)量和受力影響,僅作為系泊系統(tǒng)在計(jì)算時(shí)圍繞的固定點(diǎn)的示意,塔架對(duì)計(jì)算結(jié)果不產(chǎn)生任何影響。
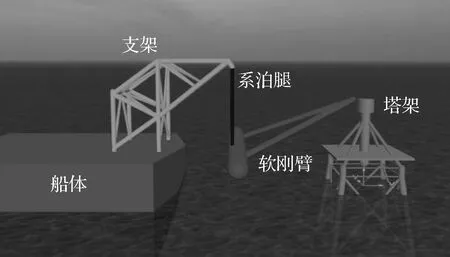
圖7 OrcaFlex中軟剛臂的主視圖
建立了OrcaFlex計(jì)算模型之后,分別在FPSO滿載和壓載條件下對(duì)OrcaFlex的靜力計(jì)算結(jié)果以及理論推導(dǎo)結(jié)果進(jìn)行分析和比較,同時(shí)與已有的SESAM Simo計(jì)算結(jié)果數(shù)據(jù)進(jìn)行對(duì)比分析,從而驗(yàn)證理論推導(dǎo)的準(zhǔn)確性。此外,基于已有的壓載工況軟剛臂水池模型試驗(yàn)數(shù)據(jù),進(jìn)一步對(duì)比分析商業(yè)軟件和理論分析的計(jì)算結(jié)果。圖8為水池試驗(yàn)現(xiàn)場(chǎng)圖。

圖8 水池試驗(yàn)現(xiàn)場(chǎng)圖
3.2 靜力對(duì)比分析
3.2.1 滿載條件
通過(guò)軟剛臂二維靜力平衡理論計(jì)算出的YOKE與水平方向的夾角、系泊腿垂直方向的夾角、系泊腿的張力以及塔架上X與Z方向上的分力與OrcaFlex軟件算出的結(jié)果、SESAM Simo模擬的結(jié)果作對(duì)比。首先考慮FPSO在滿載條件下的情況,對(duì)比與誤差如圖9至圖13所示,計(jì)算數(shù)據(jù)如表1至表5所示。

圖13 滿載時(shí)塔架Z方向力對(duì)比

表1 滿載時(shí)水平方向夾角的計(jì)算值及誤差
從圖9的對(duì)比中可以看出,水平方向夾角的理論計(jì)算結(jié)果與OrcaFlex的計(jì)算結(jié)果吻合良好;與Simo計(jì)算結(jié)果有著3.5%左右的誤差,船體位移為-6.4 m時(shí),理論計(jì)算結(jié)果與Simo結(jié)果相差最大,約3.797%,這樣的誤差屬于可接受范圍內(nèi)。
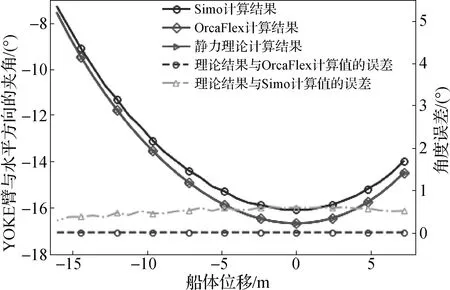
圖9 滿載時(shí)水平方向夾角對(duì)比
從圖10的對(duì)比以及表2的數(shù)據(jù)中可以看出,在計(jì)算垂直方向夾角時(shí),理論計(jì)算結(jié)果與OrcaFlex和Simo的計(jì)算結(jié)果吻合良好,誤差不超過(guò)1%。在船體位移接近0 m時(shí),系泊腿與垂直方向的夾角將趨近于0°,圖10中僅展示絕對(duì)誤差的大小,表2中數(shù)據(jù)為相對(duì)誤差值。

圖10 滿載時(shí)垂直方向夾角對(duì)比

表2 滿載時(shí)垂直方向夾角的計(jì)算值及誤差
在二維靜力平衡理論的推導(dǎo)當(dāng)中,水平及垂直方向夾角是得到各項(xiàng)力計(jì)算結(jié)果的基礎(chǔ)。而從圖9及圖10的誤差對(duì)比來(lái)看,理論計(jì)算得到的角度結(jié)果與OrcaFlex計(jì)算的角度結(jié)果誤差極小,說(shuō)明與OrcaFlex結(jié)果的對(duì)比是有意義的。
從圖11的系泊腿張力對(duì)比圖和表3中可以看出,理論計(jì)算結(jié)果與OrcaFlex和Simo的計(jì)算結(jié)果有著一定的差距。
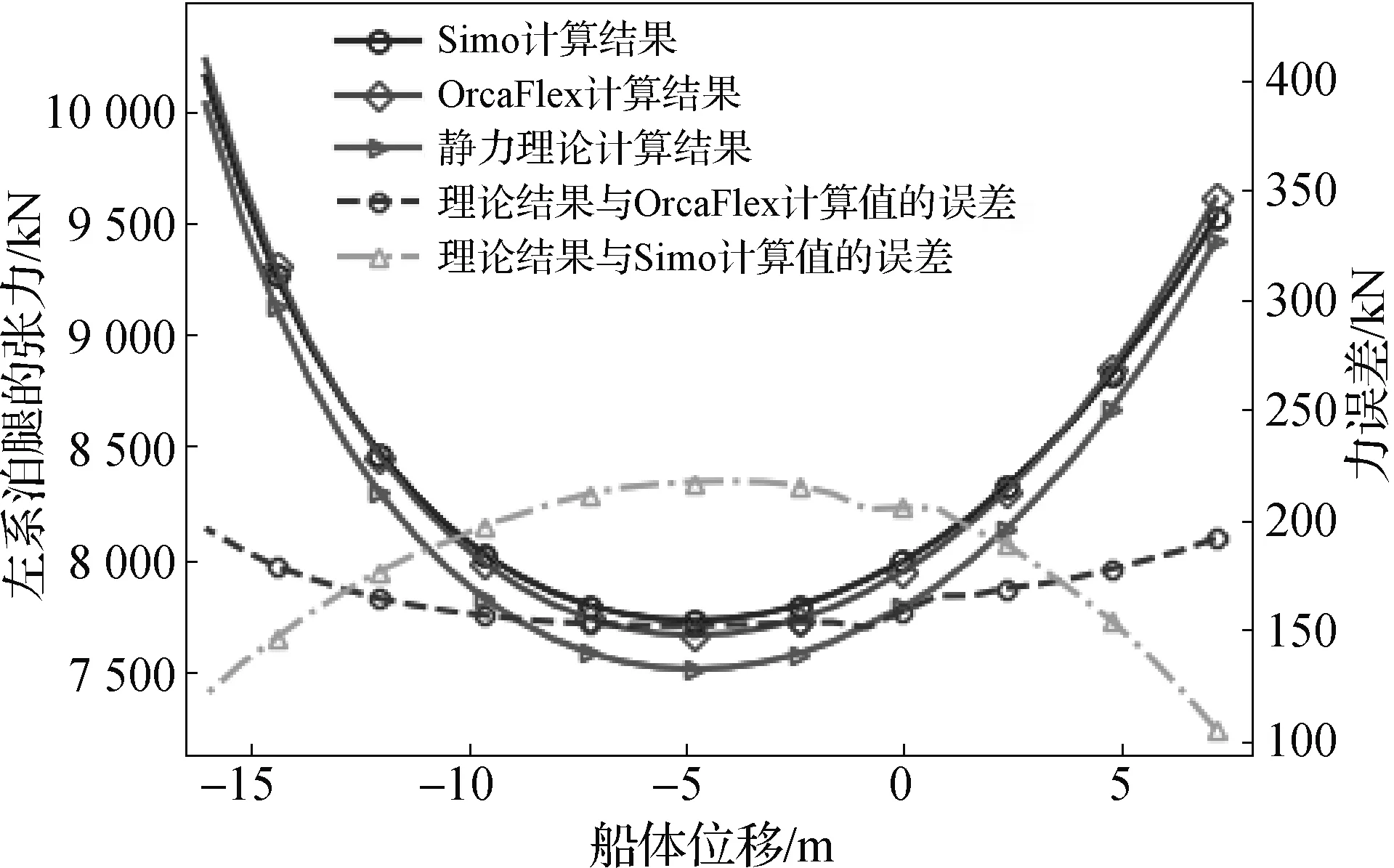
圖11 滿載時(shí)系泊腿張力的對(duì)比
系泊腿張力較小時(shí),理論計(jì)算結(jié)果與OrcaFlex結(jié)果的誤差較小,但與Simo結(jié)果的絕對(duì)誤差較大。從表3的數(shù)據(jù)中可以了解到,理論計(jì)算結(jié)果與兩種軟件計(jì)算結(jié)果的相對(duì)誤差仍然保持在3%以下,處于誤差允許的范圍內(nèi)。
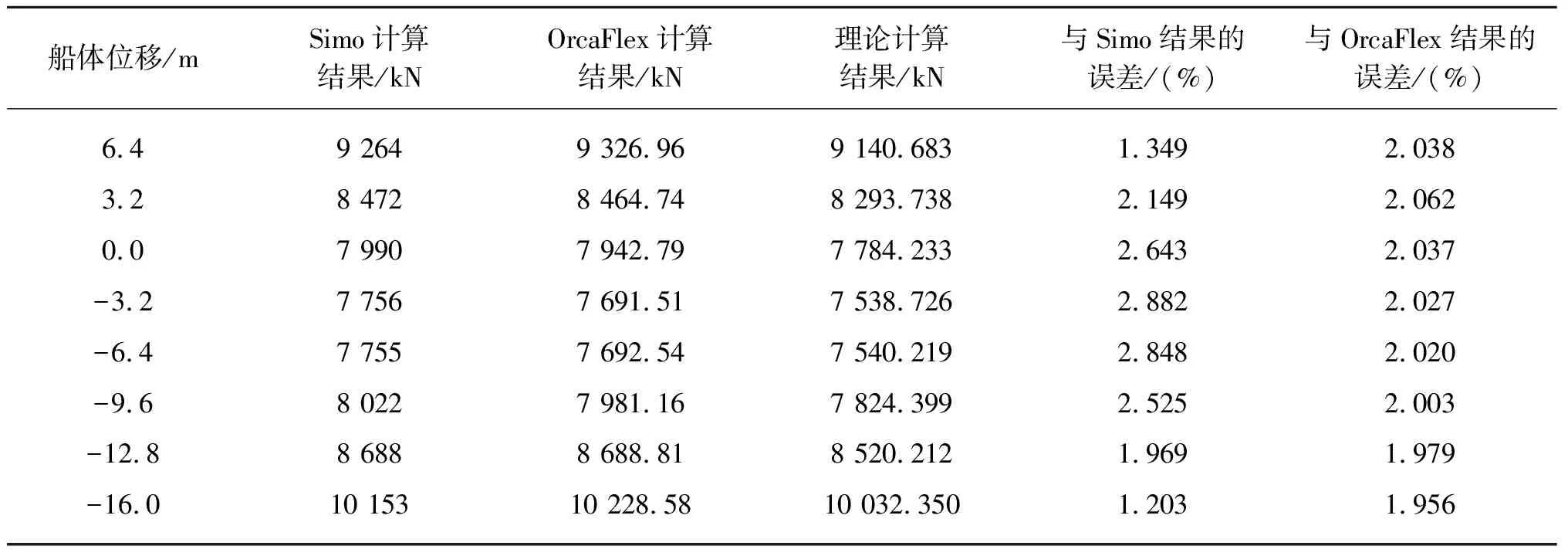
表3 滿載時(shí)系泊腿張力的計(jì)算值及誤差
從圖12和表4中可以看出,在計(jì)算塔架X方向力時(shí),3種計(jì)算方法的結(jié)果基本吻合,理論計(jì)算結(jié)果與商業(yè)軟件計(jì)算結(jié)果的誤差約為2%。與垂直方向夾角相同的是,在船體位移為0 m時(shí),塔架X方向的力也趨近于0 kN。隨著船體向兩個(gè)方向移動(dòng),計(jì)算結(jié)果的絕對(duì)誤差也隨之增加,而相對(duì)誤差則變化不大。

表4 滿載時(shí)塔架X方向力的計(jì)算值及誤差

圖12 滿載時(shí)塔架X方向力對(duì)比
從圖13和表5中可以看出理論計(jì)算結(jié)果與OrcaFlex的計(jì)算結(jié)果相差不大,相對(duì)誤差在1.5%左右;但是與Simo的計(jì)算結(jié)果相差較大,最大相對(duì)誤差超過(guò)了4%。

表5 滿載時(shí)塔架Z方向力的計(jì)算值及誤差
從以上比較可以發(fā)現(xiàn),所提的軟剛臂二維平衡理論計(jì)算結(jié)果與OrcaFlex計(jì)算結(jié)果吻合較好,相對(duì)誤差大部分都保持在3%以內(nèi),只有塔架水平方向力的誤差較大。而理論計(jì)算的結(jié)果與SESAM Simo中結(jié)果的相對(duì)誤差約為3%~5%,系泊腿的張力以及塔架在Z方向的分力隨FPSO縱蕩位移的變化曲線與SESAM Simo結(jié)果存在較大誤差,但其相對(duì)誤差不超過(guò)5%,屬于在允許范圍之內(nèi)。
3.2.2 壓載條件
在考慮船體的壓載條件下,將理論計(jì)算結(jié)果與Orcaflex軟件計(jì)算結(jié)果、SESAM Simo軟件計(jì)算結(jié)果和水池試驗(yàn)的數(shù)據(jù)進(jìn)行對(duì)比,如圖14至圖18所示。圖14所示為壓載條件下,3種方法計(jì)算YOKE水平方向夾角的對(duì)比。由于在水池試驗(yàn)當(dāng)中對(duì)YOKE水平方向的夾角獲取較為復(fù)雜,試驗(yàn)數(shù)據(jù)中并未記錄水平方向夾角,因此圖14中僅由3條曲線進(jìn)行對(duì)比。從圖14中可以看出,理論計(jì)算結(jié)果與OrcaFlex計(jì)算結(jié)果吻合良好,與Simo的結(jié)果約有3%的誤差。

圖14 壓載時(shí)水平方向夾角對(duì)比
圖15為垂直方向上3種計(jì)算方法的計(jì)算結(jié)果與試驗(yàn)數(shù)據(jù)的對(duì)比。從圖15中可以看出4條曲線的吻合度很高,相互之間相對(duì)誤差不超過(guò)1%。從系泊腿張力對(duì)比圖16可以看出,靜力理論計(jì)算結(jié)果要略小于OrcaFlex以及Simo的計(jì)算結(jié)果,誤差約為3%;理論計(jì)算結(jié)果與試驗(yàn)結(jié)果的誤差較大,約為5%。船體位移大于15 m之后,靜力理論計(jì)算結(jié)果與OrcaFlex計(jì)算結(jié)果的誤差明顯減小。
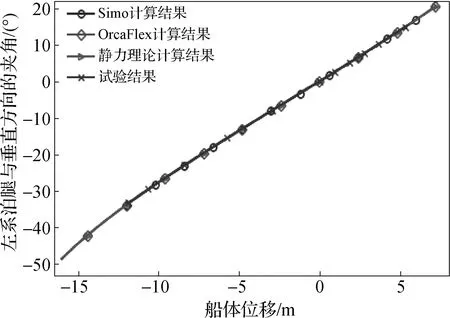
圖15 壓載時(shí)垂直方向夾角對(duì)比

圖16 壓載時(shí)系泊腿張力的對(duì)比
對(duì)于壓載條件下塔架頂端水平方向的力而言(圖17),3種計(jì)算結(jié)果的曲線與試驗(yàn)數(shù)據(jù)曲線吻合良好,相對(duì)誤差為2%左右。而在船體位移大于10 m時(shí),試驗(yàn)結(jié)果曲線有逐漸偏離靜力理論計(jì)算結(jié)果曲線的趨勢(shì),此時(shí)的相對(duì)誤差仍為2%。圖18為塔架垂直方向力的對(duì)比,可以看出,靜力理論計(jì)算結(jié)果曲線與OrcaFlex計(jì)算結(jié)果曲線擬合較好,相對(duì)誤差約為2%;與Simo計(jì)算結(jié)果的相對(duì)誤差約為3%;試驗(yàn)結(jié)果曲線與另外3條曲線的偏差較大,但變化趨勢(shì)與其它曲線相同。
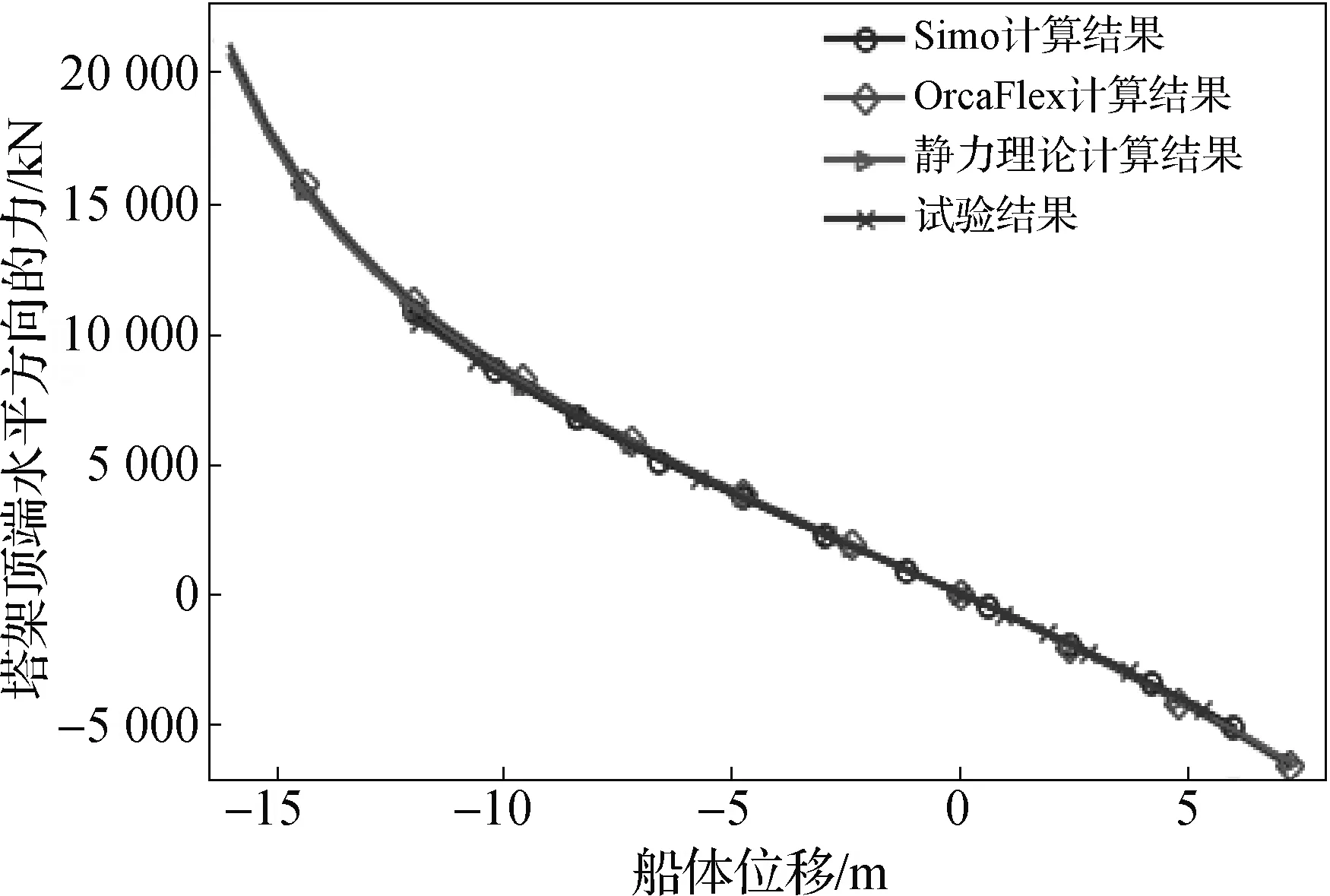
圖17 壓載時(shí)塔架X方向力對(duì)比

圖18 壓載時(shí)塔架Z方向力對(duì)比
由數(shù)值與試驗(yàn)對(duì)比中可以看出,在垂直方向夾角和塔架X方向力上,幾種計(jì)算方法的結(jié)果幾乎一致;在水平方向夾角與系泊腿張力上,理論計(jì)算值與軟件計(jì)算結(jié)果存在一定誤差;而對(duì)于塔架Z方向力,試驗(yàn)值與理論計(jì)算值以及軟件計(jì)算值有著較大誤差。軟剛臂錨泊系統(tǒng)模型試驗(yàn)搭建和標(biāo)定較為困難,船體繞單點(diǎn)也容易產(chǎn)生轉(zhuǎn)動(dòng),試驗(yàn)開(kāi)展起來(lái)影響因素較多,因此試驗(yàn)獲得精確值的概率不高,但是試驗(yàn)仍然能夠較為準(zhǔn)確地反應(yīng)系泊力的變化趨勢(shì)。從圖18來(lái)看,誤差總體變化穩(wěn)定,可以輔助佐證理論計(jì)算的準(zhǔn)確性。
總體而言,理論分析計(jì)算結(jié)果與兩種軟件的計(jì)算結(jié)果以及試驗(yàn)的部分結(jié)果都能良好吻合,充分證明了理論計(jì)算結(jié)果對(duì)FPSO軟剛臂系統(tǒng)模擬的準(zhǔn)確性和可靠性,為后續(xù)的時(shí)域計(jì)算分析打下了很好的基礎(chǔ)。
4 結(jié) 語(yǔ)
針對(duì)某軟剛臂式FPSO,建立了壓載艙式水上軟剛臂單點(diǎn)系泊系統(tǒng)二維靜力平衡計(jì)算公式,并采用OrcaFlex等商業(yè)軟件對(duì)理論計(jì)算結(jié)果與數(shù)值計(jì)算結(jié)果開(kāi)展了對(duì)比分析。另外,還通過(guò)與水池試驗(yàn)的數(shù)據(jù)進(jìn)行對(duì)比,進(jìn)一步驗(yàn)證了分析結(jié)果的準(zhǔn)確性。
在FPSO的軟剛臂系統(tǒng)靜力分析中,在船體縱蕩位移方向,軟剛臂結(jié)構(gòu)靜力公式推導(dǎo)的結(jié)果與OrcaFlex軟件計(jì)算得到的剛度回復(fù)力曲線吻合良好且兩條曲線基本一致,與SESAM Simo計(jì)算結(jié)果相比趨勢(shì)一致,系泊水平力吻合良好,傾角略大于Simo計(jì)算值,在允許誤差范圍內(nèi)。以上結(jié)論可以證明文中推導(dǎo)出的軟剛臂單點(diǎn)系泊系統(tǒng)靜力分析公式的準(zhǔn)確性。利用這一公式,可以對(duì)軟剛臂系泊系統(tǒng)靜力剛度進(jìn)行分析和計(jì)算,為進(jìn)一步分析軟剛臂系統(tǒng)的動(dòng)態(tài)穩(wěn)性做好了鋪墊。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
小天使·一年級(jí)語(yǔ)數(shù)英綜合(2015年2期)2015-01-14 06:35:05
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
