數字微鏡器件(DMD)雜散光特性測試方法及裝置
2022-03-29 13:04:40姚雪峰于晨陽李文昊于宏柱李曉天
中國光學 2022年2期
關鍵詞:區域
姚雪峰,高 毅 ,龍 兵 ,于晨陽,李文昊,于宏柱,張 靖,5,李曉天
(1.中國科學院長春光學精密機械與物理研究所,吉林 長春 130033;2.中國刑事警察學院 痕跡檢驗鑒定技術公安部重點實驗室,遼寧 沈陽 110035;3.刑事檢驗四川省高校重點實驗室(四川警察學院),四川 瀘州 646000;4.中國電子科技集團公司第十研究所,四川 成都 610036;5.中國科學院大學,北京 100049)
1 引 言
數字微鏡器件(Digital Micro-mirror Device,DMD)是一種基于現代微納加工工藝制作出來的微小反射鏡陣列[1-2]。DMD最早是作為光學投影儀上的二進制光學調制器開發和使用的[3-5],后來因其具有傳輸效率高、控制靈活、可實現較高的幀頻以及可靠性好等優點被廣泛應用在紅外目標模擬、多目標成像光譜探測以及熒光光譜探測等眾多領域[6-7]。
目前在使用DMD開發各類儀器時通常會把DMD的微鏡單元等效成平面反射鏡,然后按照平面反射鏡的光學特性開展后續設計工作[8-9]。然而,由于微鏡單元中心位置存在孔道結構以及相鄰微鏡單元之間存在間隙,使得DMD微鏡單元的真實光學特性與平面反射鏡略有不同,因此將微鏡單元等效成平面反射鏡會導致儀器的成像質量、靈敏度以及信噪比等指標無法達到理論設計值。解決這一問題最有效的辦法就是先通過實驗手段測得DMD的真實光學特性,然后根據測試結果在后面的設計階段采取有針對性的補償和校正措施[10-11]。
然而,由于微鏡單元的尺寸較小,通常只有十幾微米見方,遠遠超出了常規檢測方法的檢測極限,因此常規檢測方法在檢測DMD光學特性方面存在一定局限性[12-15]。考慮到雜散光是造成DMD的光學特性與平面反射鏡不符的主要因素之一,因此,本文提出了一種DMD雜散光測試及評估方法,并搭建實驗裝置對某一型號商用DMD進行了測試,得到其在2×2陣列模式下的雜散光分布情況。這些方法和數據對于今后利用DMD開發新型成像和光譜設備有很好的參考價值。
2 DMD結構原理及雜散光來源分析
圖1為DMD的實物照片以及3×3陣列微鏡單元區域的局部放大圖。從圖中可以看到DMD是由許多面中心位置帶有微孔道結構的微小反射鏡以矩形陣列的形式排列在一起構成的,在相鄰微鏡單元之間還留有一定間隙,以確保微鏡單元在翻轉時不會干涉。
圖2為單個微鏡單元的三維結構爆炸圖以及相鄰兩個微鏡單元分別處在兩個不同極限位置時的三維模型示意圖。從圖中可以看到,微鏡單元自上而下分別為鏡面反射層、兩個控制鏡面反射層翻轉的電極層以及一個CMOS層。其中鏡面反射層位于電極層的上方,鏡面反射層的下方伸出一個中空的方桿結構,方桿結構的下方被固定在了上層電極層的偏轉線圈上面;偏轉線圈對稱分布在鉸鏈的兩側,鉸鏈的回轉軸線方向與微鏡單元的對角線方向一致,偏轉線圈帶動鏡面反射層以鉸鏈為回轉軸在正反兩個極限位置間來回切換;最下面的CMOS層負責根據上位機發送過來的控制指令找到對應的微鏡單元并給其電極施加上對應的電壓,使電極與偏轉線圈之間產生靜電吸附力,以此來驅動偏轉線圈帶動上層鏡面反射層偏轉到指定方位。由于每一個微鏡單元都可以單獨控制,因此可以通過編程的方式控制任意一個或者幾個微鏡單元按照使用者的意圖偏轉到指定方位,以此來實現多目標選擇的效果。
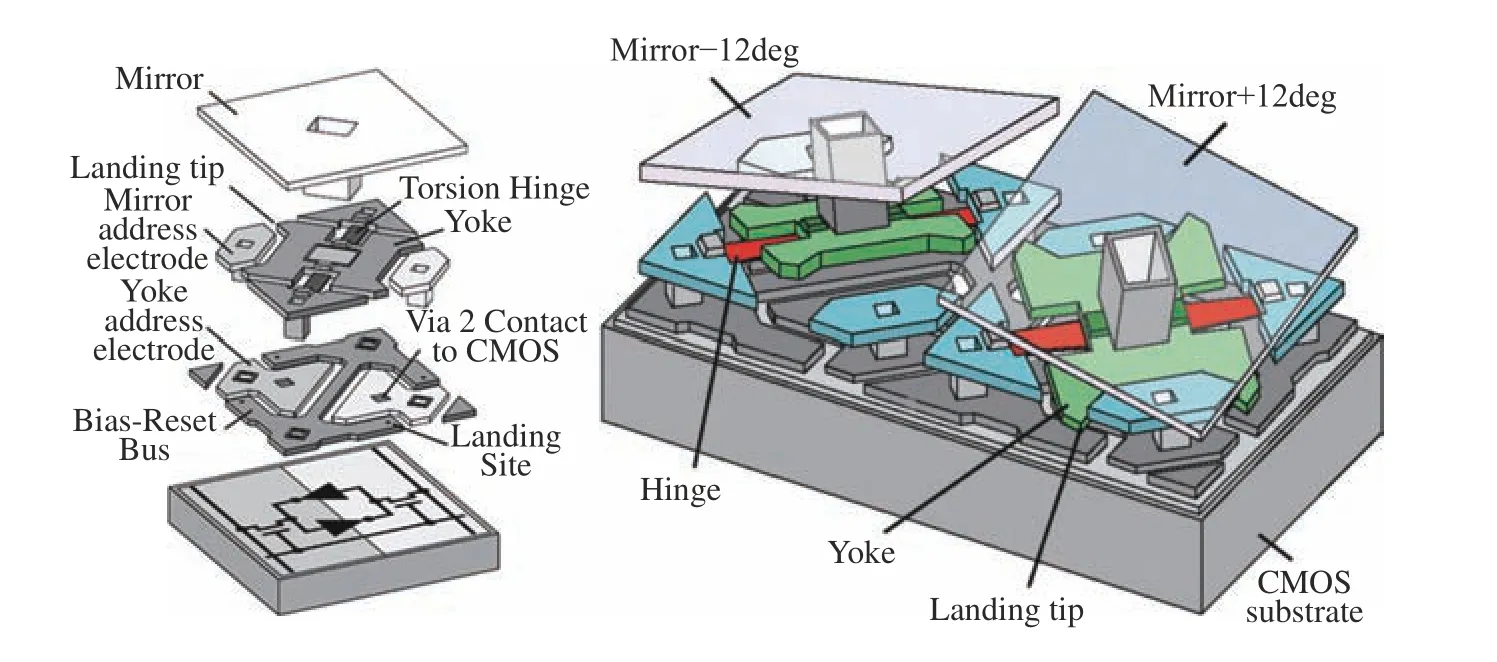
圖2 微鏡單元三維結構示意圖Fig.2 Schematic diagram of the three-dimensional structure of the micro-mirror unit
通過以上介紹可知,由于微鏡單元中心孔道、邊緣處的反射特性與其它位置反射特性有著較大的差異,因此這幾個地方容易產生雜光;此外,由于相鄰微鏡單元之間存在縫隙,入射到微鏡單元表面的光線會有一部分穿過縫隙照射到位于反射層下方的支撐結構上面,再經過一系列反射后以雜散光的形式散發出去。對于多目標成像光譜儀等光學儀器來說,雜散光會對儀器的分辨率、信噪比等指標產生比較大的影響,因此在使用DMD開發相關儀器時應考慮如何將雜散光對儀器性能的影響降到最低[16]。
減小雜散光對儀器性能影響最有效的辦法就是先對DMD進行測試,得到其雜散光分布情況,然后再進行有針對性的補償和校正,例如設置消光光闌、粘貼雜散光吸收膜以及噴涂消光漆等等。此外弄清雜散光分布情況對于后期圖像處理環節的像元灰度值閾值確定也具有一定參考意義。
3 測試裝置與測試方法
由于微鏡單元尺寸較小且組合方式靈活多變,因此,常規方法檢測DMD的雜散光特性會有很大的局限性,本文專門設計了一種匯聚光斑大小可調的雜散光測試裝置,圖3給出了該測試裝置的光路示意圖。如圖3所示,激光器光束出射方向與掉電狀態下的微鏡單元反射面垂直;激光器發出的光束經擴束、孔徑調整、濾光、聚焦后匯聚在DMD微鏡單元反射面上,匯聚光斑大小與可變光闌的通光口徑有關。當DMD的微鏡單元沿順時針方向旋轉至極限位置時,入射到微鏡單元上的光束會被反射至接收通道,經前置鏡頭聚焦后照射在探測器上。圖4為測試裝置的實物照片。從圖4可以看到,整套測試系統由照明系統、被測DMD和成像系統組成,其中照明系統由激光器、光纖準直器、可變光闌、濾光片、聚焦鏡頭、DMD、DMD安裝座、二維位移臺以及控制板卡組成,成像系統由CMOS探測器和具有1×放大倍率的前置鏡頭組成。

圖3 測試裝置光路圖Fig.3 Light path diagram of the test device
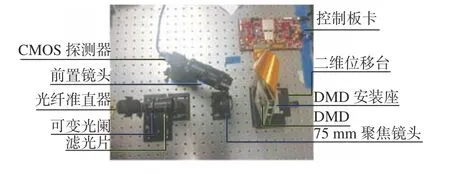
圖4 測試裝置實物照片Fig.4 Photo of the test device
測試使用的激光波長為632.8 nm。激光器發出的光束經過光纖準直器后被擴束成平行光,位于光纖準直器后端的可變光闌可以控制入射到75 mm焦距鏡頭上光束的通光孔徑,準直光束經過該鏡頭后會在其焦平面位置形成匯聚光斑。匯聚光斑大小與前端照明系統F/#有關。當F/#相對較大時,衍射極限起主導作用,這種情況下的匯聚光斑半徑r可由下列公式計算得到:

式中λ 為激光光束波長。當F/#相對較小時,幾何像差起主導作用,這種情況下的匯聚光斑大小可以通過仿真分析得到。圖5和圖6分別給出了F/#=8以及F/#=17兩種情況下的匯聚光斑大小的仿真計算結果,如圖7所示,當F/#=8時,前端照明系統的幾何像差會占據主導地位,此時匯聚光斑半徑為37.11 μm,大體上可以完全覆蓋3×3陣列區域的微鏡單元。當F/#=17時,前端照明系統的衍射效應會占據主導地位,此時匯聚光斑半徑為13.63 μm,大體上可以完全覆蓋2×2陣列區域的微鏡單元。

圖5 F/#=8時的光斑大小模擬結果Fig.5 Simulation results of the spot size when F/#=8
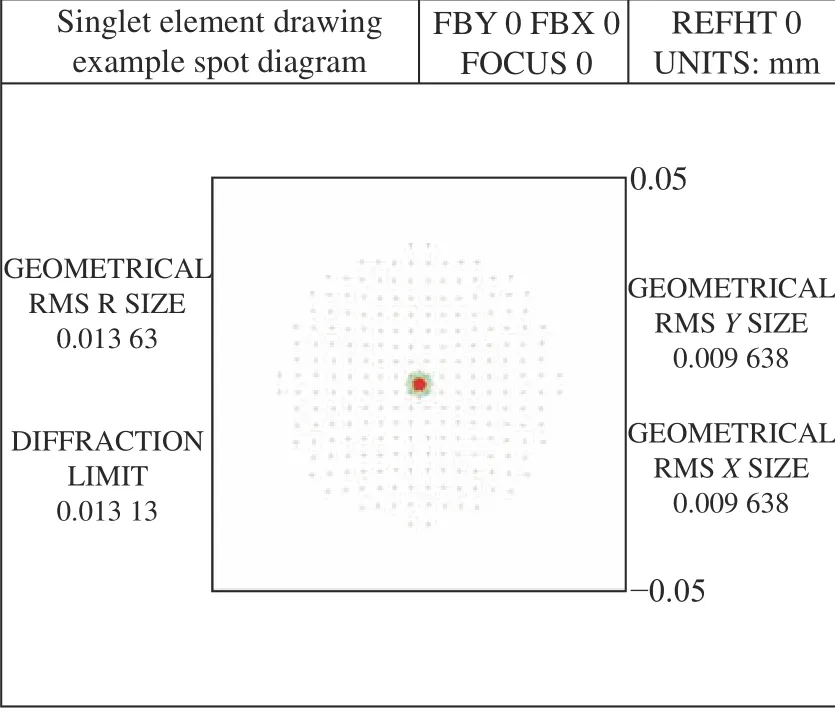
圖6 F/#=17時的光斑大小模擬結果Fig.6 Simulation results of the spot size when F/#=17
考慮到DMD微鏡單元狀態切換時的回轉軸向方向與其對角線方向平行,因此在安裝時需要將DMD旋轉一定角度,以確保微鏡單元回轉軸線方向恰好能夠垂直于光路主光線所在平面。此外為了便于調整光斑的匯聚位置,需要將DMD安裝在一個可以在水平面內進行二維調整的位移平臺上。
成像系統由CMOS探測器以及位于其前端的前置鏡頭組成。探測器選用了Pointgrey公司的Blacky S型號產品。該探測器配備了一塊由日本索尼公司提供的1/2.9”尺寸傳感器,其分辨率為1 440×1 080,像元中心距為3.45 μm。前置鏡頭選用的是基恩士公司的CA-LM0510型號產品,其主要技術參數如表1所示,在1×放大倍率以及550 nm波長條件下,該鏡頭的空間分辨率為3.4 μm,幾乎與探測器像元尺寸一致。

表1 前置鏡頭主要技術參數Tab.1 Main technical parameters of the front lens
被測DMD微鏡單元中心距為13.7 μm×13.7 μm,在1×放大倍率下單個微鏡單元在探測器上所成的像大致需要占據4×4個像元,數量上超過兩個像元的分辨極限,由此可以說明該成像系統具備對微鏡單元清晰成像的能力。
測試前,先調整匯聚光斑大小,使其剛好能覆蓋n×n陣列區域的微鏡單元,為了表述方便,將被覆蓋的n×n陣列區域微鏡單元記為S1,n×n陣列區域之外微鏡單元記為S2;接下來,將S1調整至指向探測器方向,記錄下此時的探測器圖像,并將其像元灰度值提取出來記作矩陣I1,則有:

為了表述方便,將DMD微鏡單元偏轉后指向探測器的一側定義為微鏡單元的“開”狀態,則式中IR為只有S1處于“開”狀態時前端照明系統在探測器上產生的灰度值矩陣。接下來,保持照射條件不變,將DMD所有微鏡單元都調整至指向探測器的方向,記錄下此時探測器圖像,并將其像元灰度值提取出來記作矩陣I2,則I2表示的是在S1以及S2同時處于“開”狀態時前端照明系統在探測器上產生的灰度值矩陣,此時有:

式中IS為S2處于“開”狀態時前端照明系統在探測器上產生的灰度值矩陣。用公式(2)減去公式(1),得到IS的表達式為

在實際應用場合,IS的物理意義為目標區域之外微鏡單元對目標區域之內微鏡單元的信號干擾。
4 測量實驗與結果
從DMD上隨機選取一個2×2陣列微鏡單元區域進行測試。測試前,先通過調整可變光闌的通光孔徑使照明系統的匯聚光斑剛好能覆蓋2×2區域微鏡單元,接下來,分別記錄僅有2×2區域處于“開”狀態以及所有微鏡單元處于“開”狀態時的探測器圖像。為了消除激光器穩定性與環境噪聲對測試結果的影響,以20 ms為時間間隔連續拍攝50幅圖像后取其平均值作為最終測試結果,如圖7(a)(彩圖見期刊電子版)和圖7(b)(彩圖見期刊電子版)所示。為了方便對比,將圖7(a)和圖7(b)像元灰度值矩陣提取出來做減法并反向合成,得到如圖7(c)(彩圖見期刊電子版)所示的圖像。此外,為了更好地消除背景噪聲,在開始測試前,以相同曝光時間分別采集10幅圖像,將其平均值作為測試環境的背景噪聲加以消除。

圖7 實驗測試結果Fig.7 Experimental test results
圖8(彩圖見期刊電子版)給出了僅 2×2陣列微鏡單元處于“開”狀態以及所有微鏡單元處于“開”狀態時的探測器像元灰度分布情況。考慮到匯聚光斑尺寸較小且近似為圓形中心對稱圖形,因此只給出了從中心位置出發一個方向的光強分布情況,如圖7中箭頭所示。圖中X軸坐標表示探測器像元編號,編號為“零”的像元對應2×2陣列微鏡單元在探測器上所成像的中心位置;Y軸表示像元的灰度值。
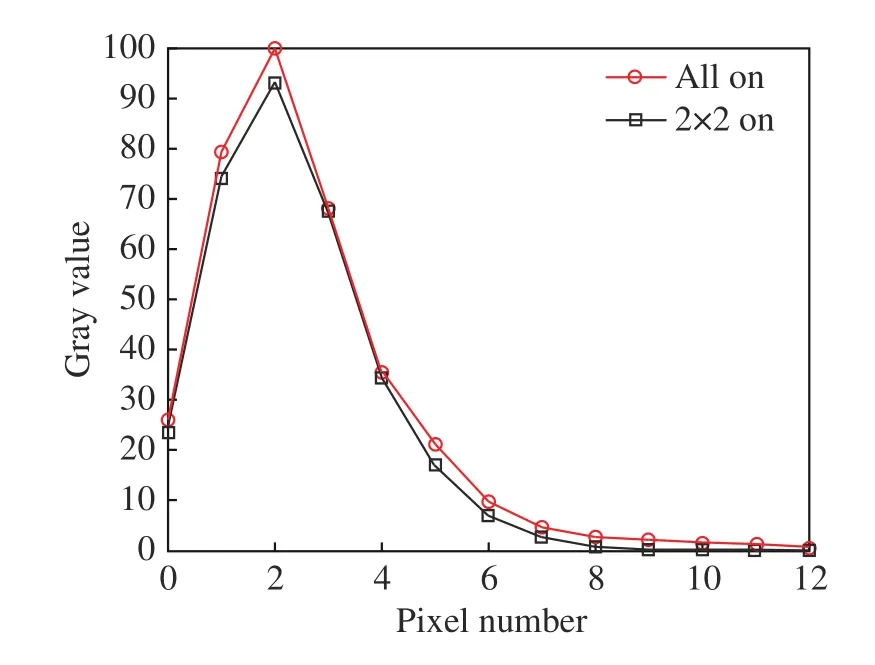
圖8 僅有2×2陣列微鏡單元處于“開”狀態以及所有微鏡單元處于“開”狀態時的探測器像元灰度分布情況Fig.8 Grayscale distribution of detector pixels when only the 2×2 array micro-mirror unit is in the "on" state and all micro-mirror units are also in the "on" state
DMD上2×2區域微鏡單元通過顯微系統成像于探測器像面,DMD微鏡單元與探測器像元之間存在嚴格的幾何成像對應關系,因此可以通過探測器上光斑能量分布情況分析出DMD的成像特性。在所搭建的這個測試裝置里面一個DMD微鏡單元成像于4×4個探測器像元上。從圖8可以看到:灰度值最大值并沒有出現在與成像光斑中心位置對應的“0”號像元上,這可能與成像光斑中心剛好對應微鏡單元縫隙的十字交叉位置,參與反射的有效面積較小有關;灰度值最大值出現在編號為“2”的像元上,在兩種測試模式下的灰度值分別為100和93,通過分析發現編號為“2”的像元剛好對應微鏡單元中心孔道位置附近,由此可以推斷這可能與微鏡單元中心孔道附近的反射較強有關,若想更加精細的描述DMD微鏡單元成像特性需要進一步提高成像系統的放大倍率與分辨率。兩種測試模式下的曲線半峰全寬(FWHM)均為4個像元左右,這表明前端照明系統絕大部分能量都能集中在測試區域范圍之內,但仍會有一部分能量散落在測試區域范圍之外,這部分能量會對DMD成像的邊緣銳利程度產生一定影響。
接下來將2×2陣列微鏡單元處于“開”狀態以及所有微鏡單元處于“開”狀態時探測器像元灰度值做減法,得到探測器像元灰度值差值曲線,如圖9 所示。圖中X軸坐標表示探測器像元編號,編號為“0”的像元對應成像光斑中心位置;Y軸為兩種不同測試模式下探測器像元灰度值的差值。從圖9可以看到,曲線在編號為“3”和編號為“7”這兩個像元位置出現了明顯的下降趨勢,而編號為“3” 和編號為“7”的像元均對應相鄰兩個微鏡單元的邊緣附近,由此可以說明微鏡單元邊緣附近的雜散光絕對強度相對較弱;雜散光絕對強度的最大值出現在編號為“2”和編號為“5”的像元上,分別對應從測試區域中心向外數第一個和第二個微鏡單元的中心孔道位置附近,灰度值分別為6.86和4.01,由此可以說明與其它地方相比微鏡單元中心孔道位置附近的雜散光絕對強度較強。
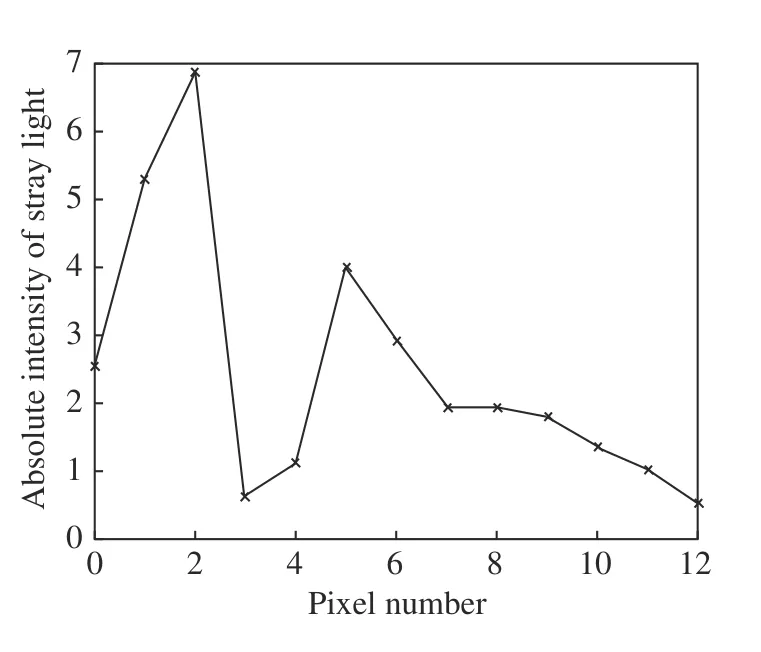
圖9 2×2陣列微鏡單元測試模式下的雜散光絕對強度分布曲線Fig.9 Absolute intensity distribution of stray light in the 2×2 array micro-mirror unit test mode
將信噪比的倒數,即雜散光強度,與有效反射光強度的比值定義為雜散光相對強度,該指標反映了雜散光強度與有效反射光強度的相對大小關系。圖10給出了2×2陣列微鏡單元的雜散光相對強度分布曲線。從圖10可以看到,雖然測試區域內的微鏡單元反射能量較強,但雜散光相對強度并不高;相反地,雖然測試區域之外微鏡單元反射的能量相對較弱,但雜散光相對強度卻很大,從測試區域邊緣開始急劇增加,經過大約兩個微鏡單元后達到峰值,數值大小為293.5%,此后開始急劇下降。這說明在測試區域范圍內微鏡單元雜散光對有用信號影響較小,而在測試區域邊緣,微鏡單元雜散光對有用信號影響較大。由此可見,對于使用DMD作為多目標選擇器件的光譜類儀器而言,目標選擇具有較大的離散性,系統性能主要受目標區域內微鏡單元雜散光影響,微鏡單元上述雜散光相對強度特性可以確保儀器獲得不錯的信噪比。
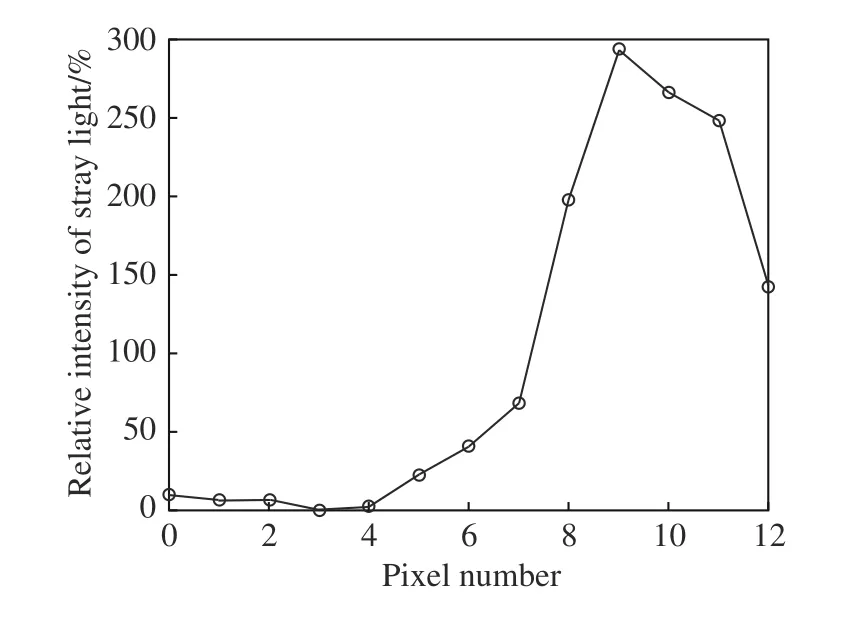
圖10 2×2陣列微鏡單元測試模式下的雜散光相對強度分布曲線Fig.10 Relative intensity distribution of stray light in the 2×2 array micro-mirror unit test mode
5 結 論
為了獲得DMD的真實光學特性,提出了雜散光測試方法,并搭建測試裝置對2×2陣列區域微鏡單元的雜散光分布情況進行了測試。測試結果表明,單個微鏡單元中心孔道位置附近反射的能量較強,靠近邊緣位置反射的能量則相對較弱,此外測試區域之外微鏡單元也會反射一部分能量;測試區域內微鏡單元雜散光絕對強度最大值出現中心孔道附近,其灰度值為6.86,緊鄰測試區域微鏡單元雜散光絕對強度最大值同樣也出現在中心孔道附近,其灰度值為4.01,由此可以說明中心孔道位置附近的雜散光較強;測試區域內微鏡單元的雜散光相對強度相對較弱,從測試區域邊緣開始急劇增大,經過大約兩個微鏡單元后達到峰值,數值為293.5%,此后開始急劇下降。以上這些結論可為今后使用DMD研制各類儀器起到一定指導作用。
然而受成像系統放大倍率和分辨率的限制,目前還無法確定造成微鏡單元不同部位反射特性不一致的具體原因,接下來可以通過選用更高分辨率的成像鏡頭以及探測器來開展下一步研究工作。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15