微細銑刀位姿同軸全息重建方法
2022-03-29 13:04:46孫藝洋許金凱于占江張向輝程亞亞于化東
中國光學 2022年2期
孫藝洋,許金凱,于占江,張向輝,程亞亞,于化東
(長春理工大學 跨尺度微納制造教育部重點實驗室,吉林 長春 130022)
1 引 言
在精密微加工過程中,微細銑刀位姿測量是精密/超精密加工領域的重要研究內容。刀具在主軸上存在裝夾偏角時,不僅會造成單刃磨損嚴重、刀具使用壽命降低,還會直接降低工件的加工精度。對于微細銑刀的位姿測量,常用的儀器及方法有激光對刀儀、激光衍射法、光學成像測量法等[1-3],上述方法的測量精度難以保證且容易損壞刀具,在實際加工中仍采用高精度彈簧夾頭來保證刀具裝夾精度。
隨著微細銑刀制造技術的革新,刀具尺度也隨之減小。機械微加工領域中目前常用的微細銑刀直徑在0.5 mm以下,這對于刀具的位姿測量提出了更高的要求。數字同軸全息技術[4]通過干涉記錄和衍射再現物體真實信息三維狀態,具有記錄光路簡單、成像速度快等特點,已廣泛用于形貌測量[5-7]、生物醫學成像[8-10]、形變測量[11]、信息安全[12-13]等領域。隨著微細銑刀直徑的減小,刀具衍射現象越發明顯,利用數字同軸全息技術對刀具進行全息成像,可以不受微細銑刀直徑的限制,進而實現微細/超細刀具的高精度測量。
微細銑刀發生裝夾傾斜時,全息再現像中會同時混合著聚焦區域和離焦區域[14],此時無法由單一再現距離確定刀具準確的軸向位置獲得精確的刀具狀態。為了精確觀測微細銑刀在機傾斜狀態,提出了基于景深的微細銑刀三維位姿重建方法。利用刀具邊緣點作為關鍵點進行位姿重建,通過模擬和實驗分析了聚焦評價算子的性能,建立了基于最小二乘法的關鍵點擬合方法修正重建誤差,通過實驗驗證了微細銑刀三維位姿重建的可行性。
2 數字同軸全息成像原理
數字全息成像原理可分為兩個過程:波前記錄和數值再現。微細銑刀數字全息記錄光路如圖1所示。用一束相干光源垂直照射物體,光波穿過物面后將形成強而均勻的透射參考光波和弱的衍射物光波,這兩部分滿足相干條件的光波發生干涉被CMOS圖像傳感器所記錄,形成物體的數字全息圖,記錄面的光強分布為I(x,y)。
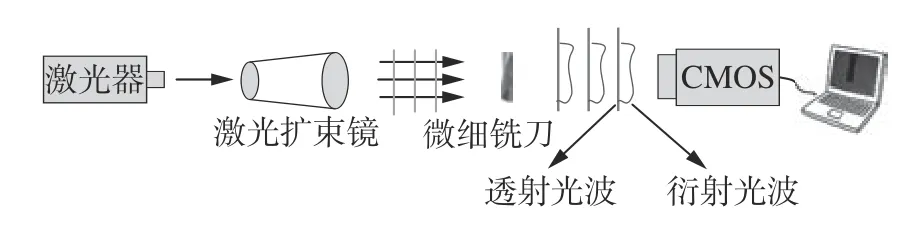
圖1 數字全息記錄過程示意圖Fig.1 Schematic diagram of the recording process of the digital holography
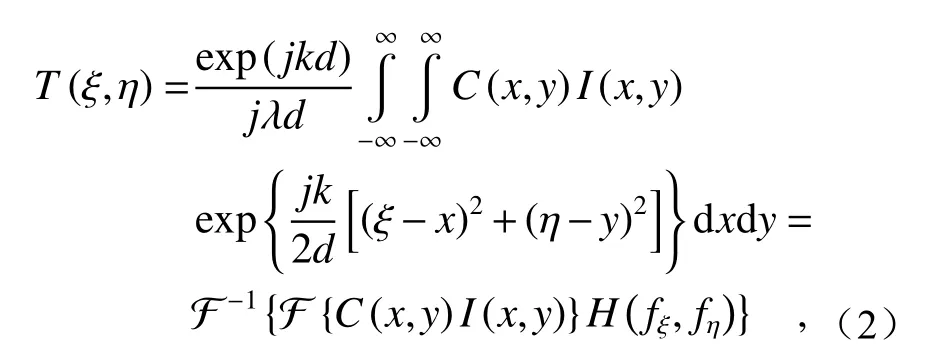
數字全息再現過程如圖2所示:計算機模擬光學衍射過程,用單位振幅平面波C(x,y)照射全息圖。

圖2 數字全息再現過程示意圖Fig. 2 Schematic diagram of the reconstruction process of the digital holography
再現光波在全息圖后的復振幅分布U(x,y)為:

根據菲涅爾衍射積分公式,此再現光波經距離d后在再現像面ξoη的復振幅分布為:
3 基于景深擴展的微細銑刀位姿重建方法
3.1 聚焦評價算子
聚焦評價算子是刀具全息再現像三維重建的關鍵判據,三維位姿重建實質是根據聚焦評價算子取值獲取軸向位置的三維顯示。通過合適的聚焦評價算子計算出每一點的聚焦程度,然后分析聚焦程度,確定其軸向位置。無論是光學圖像還是全息再現像,圖像聚焦越清晰,其灰度變化越劇烈。尤其是圖像的邊緣位置,聚焦清晰的圖像較模糊圖像有更高的銳度,前者往往也能體現更豐富的細節信息。所以圖像的聚焦程度可以用灰度變化的平均程度即灰度方差來衡量,而采用局部灰度方差能夠降低背景的干擾,進一步增強圖像的對比度。
局部灰度方差函數定義為:
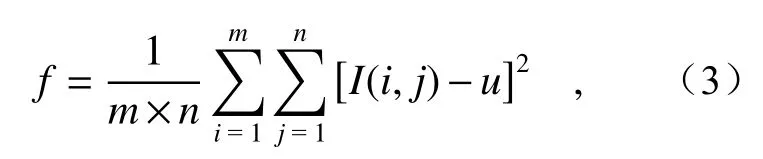
式中u為m×n區域灰度的平均值,文中m,n的取值為3。
小波變換局部方差算子是基于小波分解后的高低頻子圖的梯度圖像局部方差進行計算。陽靜等人[15]采用該算子對傾斜碳纖維進行了較好的三維重建。實現過程是對全息再現像進行小波分解,并利用Sobel算子求取高低頻系數子圖的梯度圖像。H表示高頻,L表示低頻,4張高低頻子圖像分別是:HH,HL,LH和LL。它們分別代表重建圖像的對角線高頻、水平高頻、豎直高頻和低頻系數。則子圖像的梯度矢量G可在x,y方向分別表示為:
再以m×n區域的高低頻子圖像的最大亮度梯度G的局部方差作為融合圖像的聚焦判據,對重建圖像進行景深擴展,依次完成重建圖像上所有點的選取,最后實現了物體的位姿重建。
3.2 刀具位姿三維重建算法
刀具全息再現像三維位姿重建的核心思想與光學成像系統的景深擴展原理類似。首先通過一系列等步長的再現距離,獲取刀具在不同軸向位置的再現像,使整個再現像序列覆蓋刀具在光場中的全部信息。由于每幅再現像中不同區域的清晰程度不一,無法用一個再現距離得到所有點都聚焦清晰的軸向位置。故需要通過聚焦分析,使重建圖像的每一點都精確聚焦,從而實現刀具三維場的重建和相關測量。
設I為全息再現像,d為再現距離,f(i,j)為再現像中(i,j)位置聚焦評價算子的取值。基于景深的全息再現像三維位姿重構步驟如下:
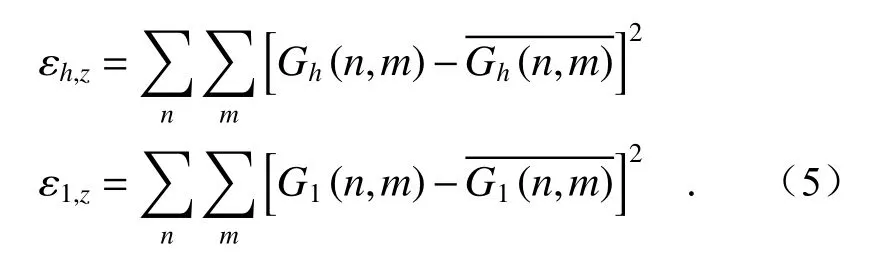
(1)得到全息圖如圖3(a)所示,保證再現距離在最小和最大記錄距離之內。通過菲涅爾再現算法,記錄n個再現距離d=d0+kΔd(k=0···n-1),Δd根據再現區間選取合適值,對應的n張全息再現像I1~In,如圖3(b)所示;
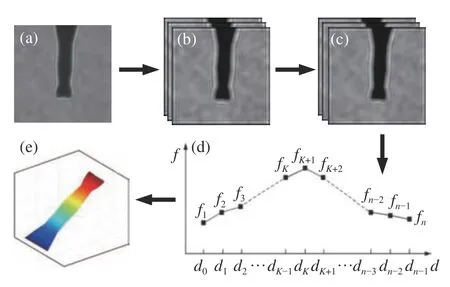
圖3 刀具三維位姿重構流程圖。(a)刀具全息圖;(b) n張再現像;(c)濾波后的n張再現像;(d)點(i, j)的最佳再現距離;(e)刀具三維位姿示意圖Fig.3 Flow diagram of three-dimensional pose reconstruction of the tool.(a) Tool hologram; (b) reconstruction images; (c) reconstruction images after filtering; (d) best reconstruction distance for point (i, j);(e) schematic diagram of the tool’s three-dimensional pose
(2)對n張全息再現像做基于改進自蛇模型濾波方法[16]處理如圖3(c)所示,再利用Sobel算子提取待測刀具的邊緣點;
(3)計算每張再現像中邊緣點對應的聚焦評價算子的取值;
(4)以邊緣點中(i,j)位置距離值的選取為例,比較n張再現像的聚焦評價值f(i,j),通過n張再現像的聚焦評價值取最大法,獲取該點的軸向位置。max(f1(i,j),f2(i,j),···,fn(i,j))對應的距離為dK,則dK為(i,j)的最佳再現距離,如圖3(d)所示,依次獲得所有邊緣點的最佳再現距離;
(5)結合邊緣點在再現像中的位置和其物理尺寸,以及對應的軸向距離,通過三維繪圖,可直觀顯示刀具在三維空間中的位置和傾斜程度如圖3(e)所示。
4 實驗結果與分析
4.1 模擬實驗
使用的數字全息實驗裝置如圖4所示。數字全息成像系統主要由激光器、激光擴束鏡、CMOS、濾波片等組成。激光器安裝架、擴束鏡安裝架及相機安裝組件的設計和安裝過程,必須保證激光器中心、擴束鏡中心和CMOS感光面中心三者共軸線。相機固定在精密滑臺上,可以X向和Y向自由移動,調節相機感光面的位置。激光器波長為635nm,CMOS記錄區域的像素數為2448×2048 pixels,為提高計算效率,截取再現像中600×1024 pixels像素大小作為計算區域。

圖4 數字全息實驗裝置示意圖Fig.4 Schematic diagram of the digital holography experimental device
利用圖4所示實驗裝置,獲得直徑0.5mm鉛芯的數字全息圖。實驗中調整鉛芯與微調角度臺垂直,如圖5(a)所示,手動調節角度臺至傾斜10°,如圖5(b)所示。圖6(a)為鉛芯的全息圖,圖 6(b)為記錄距離2 5.8mm處的再現像。
圖5 鉛芯數字全息實驗裝置示意圖。(a)擺正狀態;(b)傾斜指定角度Fig.5 Schematic diagram of the digital holographic experimental device for the lead core as simulated sample.(a) Straightened; (b) incline at a specified angle
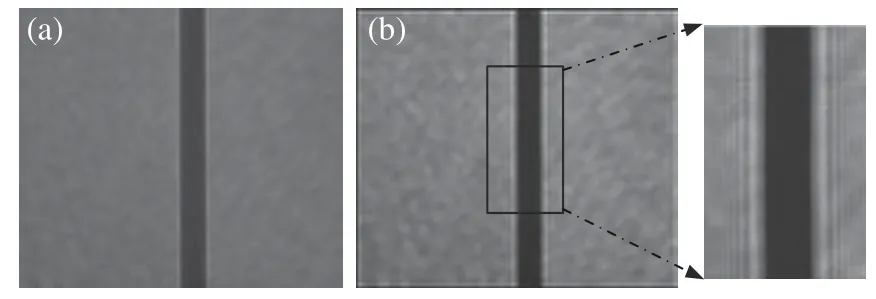
圖6 鉛芯數字全息圖及再現像。(a)數字全息圖;(b)再現像(左)及計算區域放大圖(右)Fig.6 Digital hologram and reconstruction image of the lead-core.(a) Digital hologram; (b) reconstruction image (left) and calculation area magnification(right)
選擇重建距離區間為 24mm~28mm,重建距離間隔10 μm,等間隔重建401張局部聚焦的鉛芯再現像。然后,分別以小波變換局部方差算子和局部灰度方差算子,計算再現像中600×1024區域每點對應的聚焦評價值,并通過聚焦評價曲線獲得聚焦評價最大值,得到如圖7(a)和圖7(b)所示圖像整體的軸向位置分布。
觀察上述軸向位置分布結果發現,兩種聚焦評價算子在低頻區域點的重建均存在聚焦評價抗干擾性不佳的情況。小波變換局部方差算子重建結果中低頻點(290,400)的聚焦評價曲線如圖8(a)(彩圖見期刊電子版)所示,可以發現該曲線單峰性不好,存在明顯干擾峰值,容易帶來重建距離的誤判。反觀邊緣點(229,400)的聚焦評價曲線(如圖8(b)所示彩圖見期刊電子版),一般都能得到準確的重建距離。觀察局部灰度方差算子重建結果中低頻點(290,400)和邊緣點(229,400)的聚焦評價曲線(如圖8(c)和圖8(d)所示),曲線的分布具有類似的特點。考慮到圖像低頻區域點重建距離的不準確性,在重建過程中舍去低頻點。從再現像中提取鉛芯的邊緣點作為關鍵點,僅對關鍵點進行三維重建。
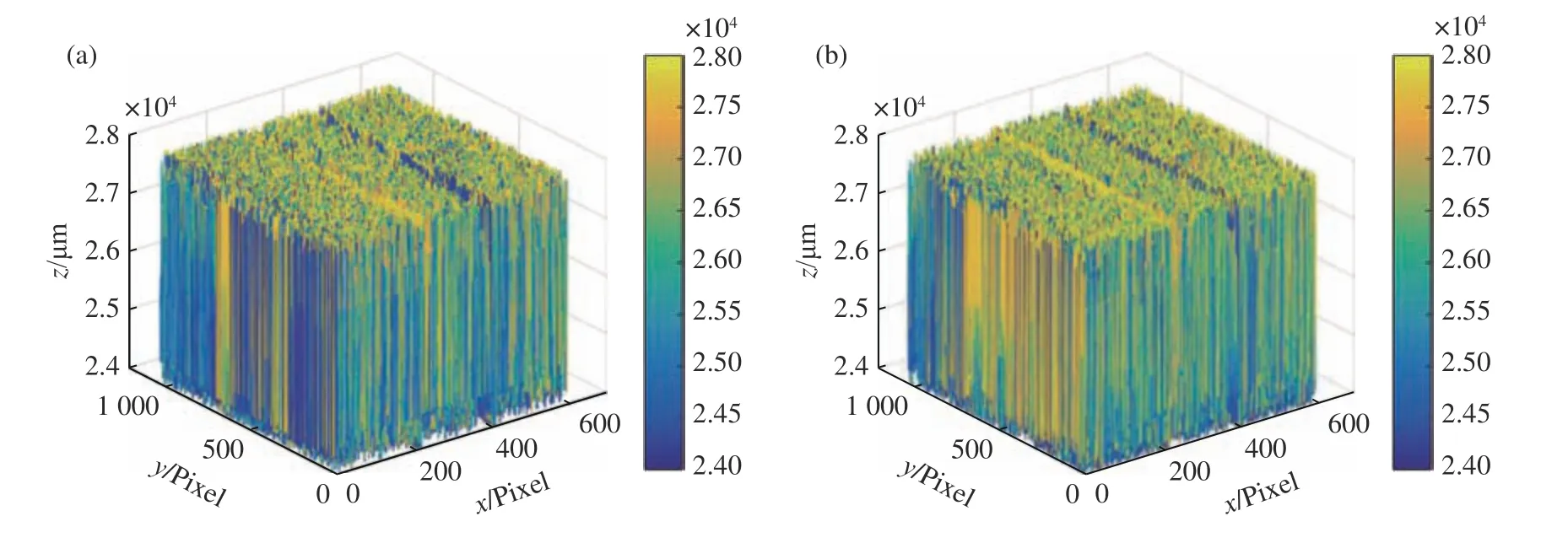
圖7 (a)小波變換局部方差算子及 (b)局部灰度方差算子對應的的整體軸向位置分布Fig.7 Overall axial position distribution corresponding to (a) the local variance operator of wavelet transform and (b) local gray-scale variance operator
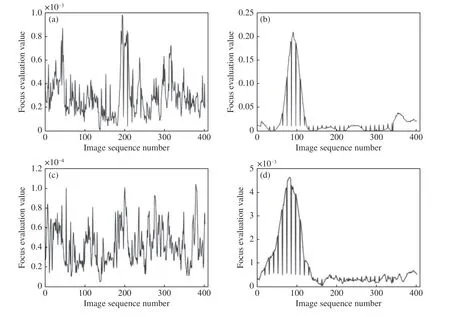
圖8 (a)小波變換局部方差算子對應的低頻點的聚焦評價曲線; (b)小波變換局部方差算子對應的邊緣點的聚焦評價曲線;(c)局部灰度方差算子對應的低頻點聚焦評價曲線; (d)局部灰度方差算子對應的邊緣點聚焦評價曲線Fig.8 (a) Focus evaluation curve of low frequency points corresponding to the local variance operator of the wavelet transform; (b) focus evaluation curve of the edge points corresponding to the local variance operator of the wavelet transform; (c) focus evaluation curve of the low frequency points corresponding to the local gray-scale variance operator;(d) focus evaluation curve of the edge points corresponding to the local gray-scale variance operator
通過改進的自蛇模型[16]對圖6(b)中再現像的計算區域做擴散濾波處理,用Sobel算子提取圖像的邊緣點,并計算邊緣點對應的距離值。再根據物理尺寸與像元大小之間的關系(1pixel=3.45μm),將xoy面的像素坐標轉換為距離坐標系,并進行三維顯示,可得到圖9所示鉛芯的三維重建結果。
從上述重建結果發現,邊緣點中也存在少部分干擾點,使鉛芯的重建結果不夠理想。為了得到準確的傾斜程度,需要去掉明顯的突變點。由于理論上大部分輪廓點的再現距離分布在同一平面上,故空間點到該平面的距離方差最小時,該平面可視為數據的主平面方向。如圖10所示,將三維點投影到yoz面上,在該平面利用最小二乘法對關鍵點做直線擬合,可得到關鍵點所在直線的斜率,干擾點的取值由直線上的點插值得到。最后根據物理尺寸與像元大小之間的關系(1pixel=3.45μm),將xoy面的像素坐標轉換為距離坐標,可得到圖11所示消除誤差后鉛芯的三維重建結果。由擬合結果知,小波變換局部方差算子測得鉛芯與水平方向的夾角為9.55°,與真實傾角基本一致。而局部灰度方差算子測得鉛芯與水平方向的夾角為9.32°,存在較大的重建誤差。
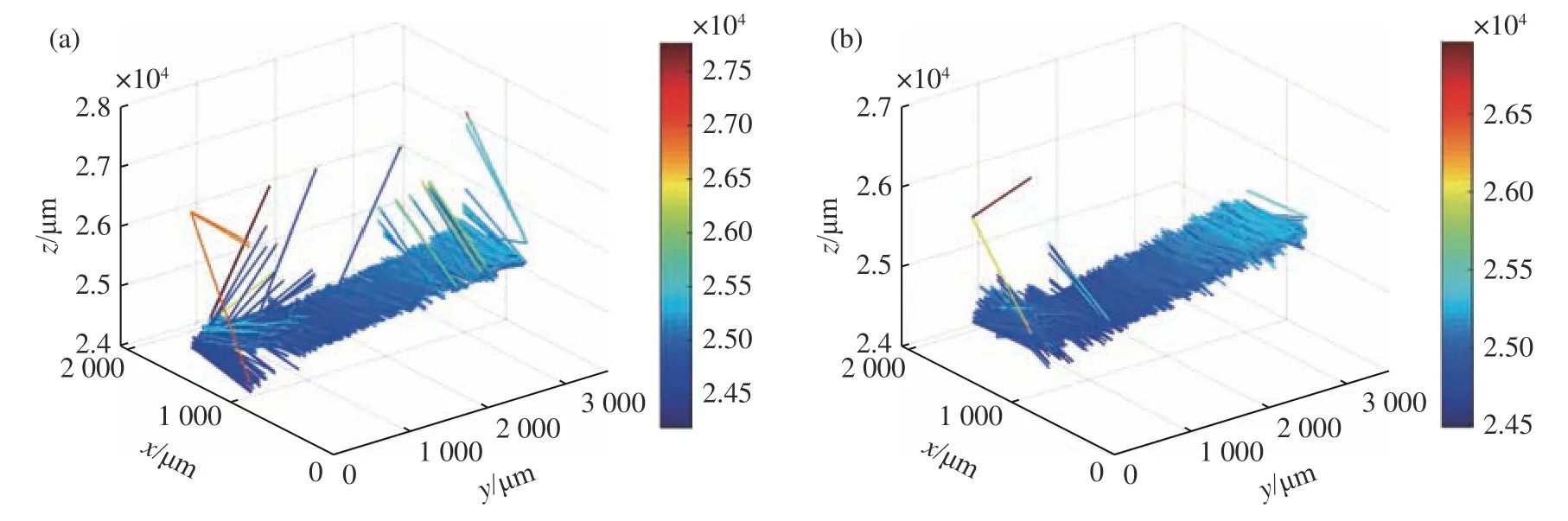
圖9 鉛芯的三維重建結果。(a)小波變換局部方差算子的三維重建結果;(b)局部灰度方差算子的三維重建結果Fig.9 Three-dimensional reconstruction results of lead core.(a) Three-dimensional reconstruction results calculated by local variance operator of the wavelet transform; (b) three-dimensional reconstruction results calculated by local gray-scale variance operator
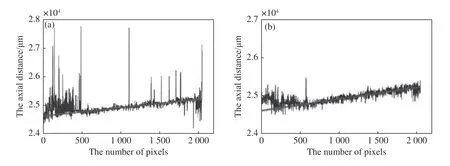
圖10 像素坐標下鉛芯三維重建結果。(a)小波變換局部方差算子的三維重建結果;(b)局部灰度方差算子的三維重建結果Fig.10 Three-dimensional reconstruction results of the lead core in pixel coordinates.(a) Three-dimensional reconstruction results calculated by local variance operator of wavelet transform; (b) three-dimensional reconstruction result calculated by local gray-level variance operator
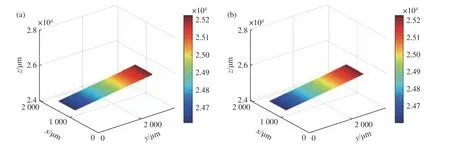
圖11 距離坐標下鉛芯三維重建結果。(a)小波變換局部方差算子的三維重建結果;(b)局部灰度方差算子的三維重建結果Fig.11 Three-dimensional reconstruction results of the lead core in the distance coordinates.(a) Three-dimensional reconstruction result calculated by local variance operator of the wavelet transform; (b) three-dimensional reconstruction results calculated by local gray-level variance operator
4.2 微細銑刀位姿重建實驗
實驗中待測銑刀與豎直方向之間的夾角為2.5°,如圖12(a)所示。使用圖4數字全息實驗裝置獲得圖12(b)所示的銑刀數字全息圖,圖12(c)為記錄距離為21 mm處的菲涅爾衍射再現像。CMOS記錄區域的像素數為1024×1024,為了提高計算效率,截取再現像中451×840像素大小作為計算區域。首先選擇再現距離區間為20.65~21.20 mm,以1 μm為距離間隔,等間隔重建551張再現像。在重建中選擇模擬實驗中效果較好的小波變換局部方差算子進行聚焦評價,重建過程與上述鉛芯重建相同。
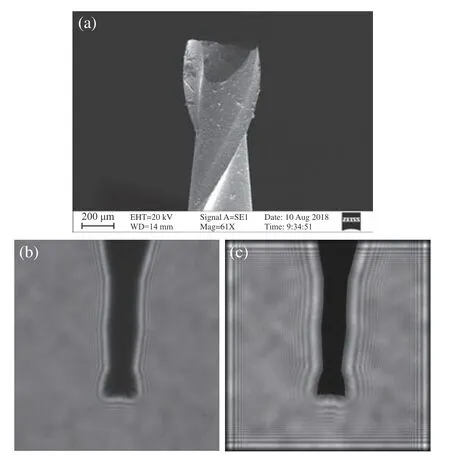
圖12 (a)待測銑刀及其(b)數字全息圖和(c)再現像Fig.12 (a) Tested tool and its (b) digital hologram and (c)reconstruction image
觀察刀具再現像中低頻點的聚焦評價曲線,如圖13(a)所示,可以發現曲線單峰性不好,存在明顯的干擾峰值,容易帶來重建距離的誤判。圖13(b)所示為再現像中邊緣點的聚焦評價曲線,能得到準確的重建距離。與模擬實驗相同,在重建過程中舍去低頻點,即從再現像中提取刀具的邊緣點作為關鍵點,僅對關鍵點進行三維重建。
對關鍵點進行三維重建后,通過干擾點去除和關鍵點擬合后,最后可獲得圖14所示銑刀的三維位姿。實測待測銑刀與豎直方向之間的夾角為2.43°,銑刀的三維重建誤差在0.1°以內。
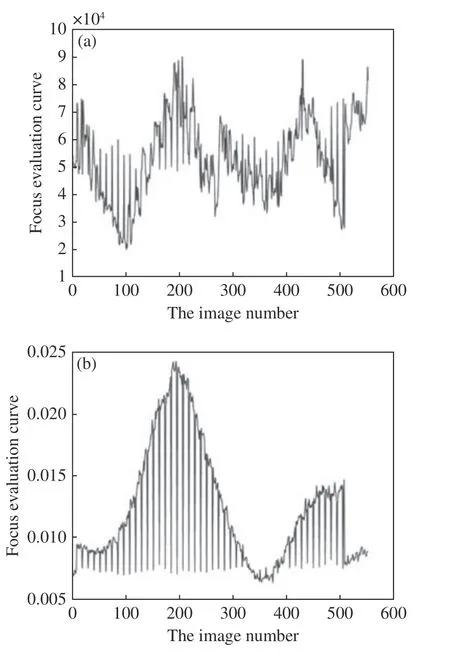
圖13 (a)銑刀再現像低頻點的聚焦評價曲線;(b)銑刀再現像邊緣點的聚焦評價曲線Fig.13 (a) Focus evaluation curve of the low-frequency point of the milling tool's reconstruction image; (b)focus evaluation curve of the edge point of the milling tool’s reconstruction image
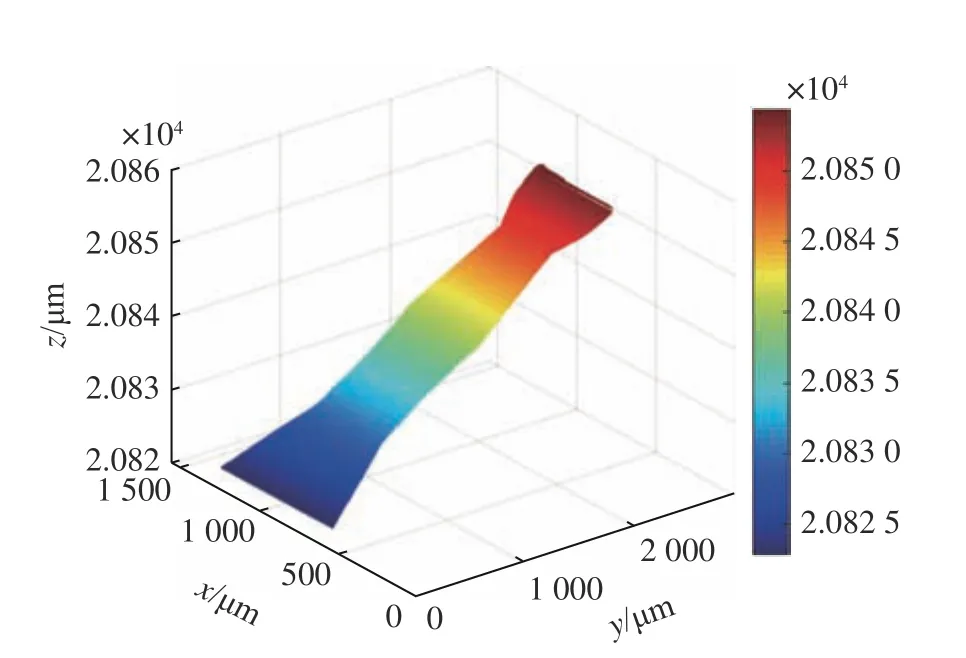
圖14 銑刀三維位姿重構結果Fig.14 Three-dimensional reconstruction results of the milling tool
5 結 論
針對現有對刀方法存在的不足,提出一種基于數字同軸全息成像技術的微細銑刀對刀方法。在對刀過程中,為了可視化觀察刀具在主軸上的傾斜狀態,提出了一種基于景深的刀具三維位姿重建方法。使用小波變換局部方差算子和局部灰度方差算子在模擬實驗中進行分析,得到小波變換局部方差算子的實驗結果更加準確。使用小波變換局部方差算子求出微細銑刀再現像中關鍵點的聚焦程度,然后分析聚焦程度,確定其對應的軸向位置,實現了微細銑刀的三維位姿測量。最后利用最小二乘法進行干擾點去除和關鍵點擬合后,對重建結果進行了誤差分析與消除,實現微細銑刀三維重建誤差優于0.1°。