基于駕駛意圖識別的插電式混合動力汽車智能算法研究
2022-03-03 09:08:20趙金寶校金龍
客車技術與研究
2022年1期
趙金寶, 校金龍
(河南工業貿易職業學院, 鄭州 450000)
不同的駕駛行為對車輛的燃油經濟性有很大影響,在同樣工況下,不同駕駛員駕駛同樣的車輛,燃油消耗差別可達到20%~30%。對插電式混合動力汽車(PHEV)而言,由于有多種動力源和不同的工作模式,其影響更加明顯。
本文先制定基于規則類的定參數控制算法,優化并確定其參數。然后在此基礎上增加駕駛意圖識別模型,建立能夠自動識別駕駛模式,并對輸出扭矩進行修正的智能控制算法,以提高PHEV對駕駛員的適應性和燃油經濟性。
1 定參數控制算法及優化
1.1 動力系統構型及整車主要參數
本文以一套單軸混聯式混合動力系統為研究對象,發動機、ISG電機、驅動電機在同一軸上,通過離合器是否結合實現不同的工作模式。此系統可以實現串聯、并聯、純電動、制動能量回收等多種模式。
整車的基本參數如下:整備質量12 500 kg;滿載質量18 000 kg;長11 900 mm、寬2 550 mm、高3 150 mm;車輪靜態半徑452 mm;迎風面積6.6 m;空氣阻力系數0.55;滾動阻力系數0.009 8;發動機功率147 kW;ISG功率80 kW;主電機功率144 kW;電池電量13.8 kW·h、電壓460 V;超級電容電量0.37 kW·h、電壓384 V;雙向DC-DC功率50 kW;主減速器速比5.77。
1.2 基于規則類的定參數控制算法
該車一開始采用的基于規則類的定參數能量控制算法如下:
1) 動力電池SOC≥0.3,CD(電量消耗)階段。若行駛需求轉矩介于發動機最小轉矩和發動機最大轉矩之間,發動機單獨驅動,工作在發動機開啟區間;若>,發動機和電動機混合驅動,發動機工作在最大轉矩;若電動機轉速在800 r/min 以下或<,由電動機單獨驅動車輛。具體如圖1所示。
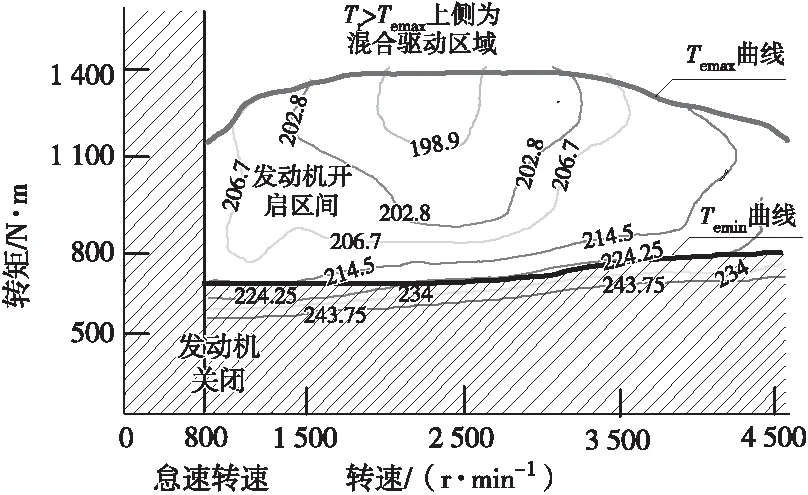
圖1 動力電池SOC≥0.3 CD階段策略
登錄APP查看全文
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26