偏航工況下海上浮式風力機基礎運動響應及錨泊載荷影響分析
2022-03-02 02:36:50楊翔宇
海洋工程 2022年1期
白 旭,楊翔宇
(1. 江蘇科技大學 船舶與海洋工程學院,江蘇 鎮江 212003; 2. 江蘇科技大學 結構力學研究所,江蘇 鎮江 212003)
自然界中風向復雜多變,水平軸風力機不能立即跟蹤風向變化,保持其軸向與風向平行,經常處于偏航工作狀態。與固定式風力機相比,海上浮式風力機支撐平臺漂浮在海面,同時承受空氣動力、水動力及系泊系統的共同影響,風力機偏航狀態更加顯著。風力機處于偏航工況時,風輪葉片周圍流場發生劇烈變化,給風輪帶來復雜的氣動載荷,對風力機基礎運動響應和錨泊載荷產生重要影響,因此了解偏航工況下風力機基礎運動響應和錨泊載荷變化,對保證海上風電場的安全平穩運行至關重要。
針對浮式風力機相關性能的研究,多基于經典葉素動量理論與勢流理論相結合的方法,Jonkman等[1]開發了一種水動力—氣動力—伺服系統—結構響應實時耦合分析的FAST程序,并對Spar式、半潛式等風力機平臺的水動力性能進行了分析,但該程序忽略了海流引起的渦激振動。在FAST程序基礎上,Marco等[2]研究了浮式風力機基礎與錨泊系統動力響應的FAST-OrcaFlex耦合分析方法,克服了FAST在水動力計算及錨泊系統模擬不準確的問題。基于此方法,鄧露等[3]研究了風浪夾角變化、氣動阻尼等因素對海上浮式風力機水動力性能的影響,表明共線風浪會造成最大的系泊張力,氣動阻尼能有效地降低縱蕩和縱搖運動RAOs的峰值。隨著計算機技術的發展,致動線模型和計算流體力學(CFD)方法在浮式風力機耦合領域得到了發展和應用,Tran等[4-5]利用計算流體力學商業軟件STAR-CCM+對半潛式風力機進行了氣動—水動耦合數值模擬,并運用了重疊網格技術來處理葉片—平臺等多級運動問題。Huang等[6]采用重疊網格方法開發了浮式風力機水動—氣動—錨鏈系統耦合分析工具FOWT-UALM-SJTU,對浮式風力機系統的氣動—水動耦合模型進行了一系列的數值分析。CFD方法尚存在諸如水氣兩相流場的計算域的劃分、計算效率低等問題需要解決,有待進一步發展。海上浮式風力機的研究多集中在耦合分析方法的實現及平臺水動力性能的研究,關于浮式風力機偏航工況下相關性能的研究較少。段鑫澤等[7]將致動線模型與CFD方法相結合,利用大渦模擬(LES)計算研究帶偏航角串列式兩風機之間的復雜尾流干擾效應。Jeong等[8]建立葉片耦合分析模型,研究了偏航誤差對葉片穩定性的影響,并未對風力機基礎運動展開研究;覃泉龍[9]運用時域耦合分析方法研究了錨鏈預張力對風力機基礎運動響應影響,表明增加系泊鏈預張力,浮式風力機的縱蕩運動響應極值和縱蕩固有周期減小,但研究并未考慮偏航工況對風力機基礎運動響應的影響;Li等[10]基于FAST程序研究了偏航及風浪不共線對浮式風力機氣動特性的影響,表明偏航的存在會降低風力機輸出功率且功率波動增大,風浪不共線對風力機基礎運動及結構載荷影響較大,但研究采用定常風載荷未考慮風切變及湍流效應影響。有關偏航工況對海上浮式風力機基礎運動響應及錨泊載荷影響有待進一步研究。
針對以上問題,以半潛式海上風力機為研究對象,基于葉素動量理論及勢流理論,采用FAST-Orcaflex程序建立浮式風力機氣動彈性—水動—伺服—系泊實時耦合分析模型,考慮湍流風場及不規則波浪影響,對海上浮式風力機偏航工況下的基礎運動響應及錨泊載荷展開研究,分析偏航工況對風力機基礎運動響應及系泊錨鏈載荷的影響規律,為海上浮式風力機安全穩定分析提供理論參考。
1 計算方法
1.1 風場模擬
海上浮式風力機工作狀態下,除受波浪及海流的影響,風力機上部高聳的結構承受較大的氣動載荷,對平臺運動以及系泊系統的影響同樣不容忽視[11]。針對海上浮式結構物的研究,通常情況下采用定常風場,未能充分考慮湍流效應對風輪影響。為準確模擬氣動載荷對浮式風力機的影響,采用Kaimal風譜模擬湍流風場。IEC61400-3標準[12]中將Kaimal譜描述為:
(1)

將風場區域劃分為17×19的網格(如圖1所示),根據功率譜分別對網格上不同點處的湍流風速進行擬合,運用相干函數保持各空間網格之間的相干性,相干函數描述為:
(2)
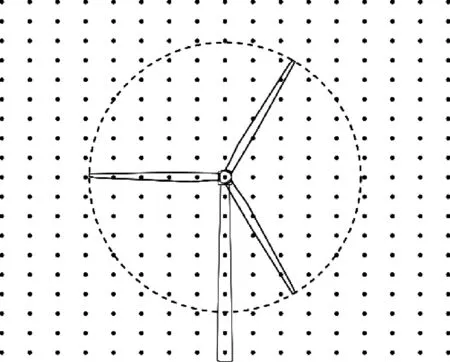
圖1 風場網格示意Fig. 1 Diagram of wind field grid
(3)
式中:Coh為相干函數;l為空間中兩異點間距;Lc為相干長度;Swij(f)為i,j兩點間的互功率譜;Swii(f)·Swjj(f)為i,j兩點間的自功率譜。
1.2 海上浮式風力機水—氣動力耦合方法
運用Orcaflex軟件對風力機平臺及系泊系統進行數值建模,將AQWA求解的浮體靜水剛度、波浪力、附加質量和輻射阻尼等水動力參數導入其中,進行水動力載荷時域分析。采用美國可再生能源實驗室(NREL)開發的風場前處理程序Turbsim模擬湍流風場氣動載荷變化,通過NREL開發的風力機時域耦合程序FAST[13]模擬風力機風輪、控制系統和塔架結構讀取風場模型,計算出控制系統及彈性變形影響下風力機的運動狀態,并將平臺位移、速度和加速度等參數通過數據傳輸程序FASTLink實時傳遞給Orcaflex。Orcaflex模擬風力機基礎及錨泊系統,利用FAST實時傳遞的數據,計算風力機考慮氣動—伺服—彈性效應的等效載荷,再將計算結果通過FASTLink傳遞回FAST,求出對應時刻風力機基礎與系泊系統的動力響應,作為計算風力機下一時刻動力響應的部分參數輸入,如此往復循環,從而實現了考慮控制系統、風輪及塔架氣動彈性、平臺水動力與錨泊載荷的全耦合分析模型,耦合分析流程如圖2。
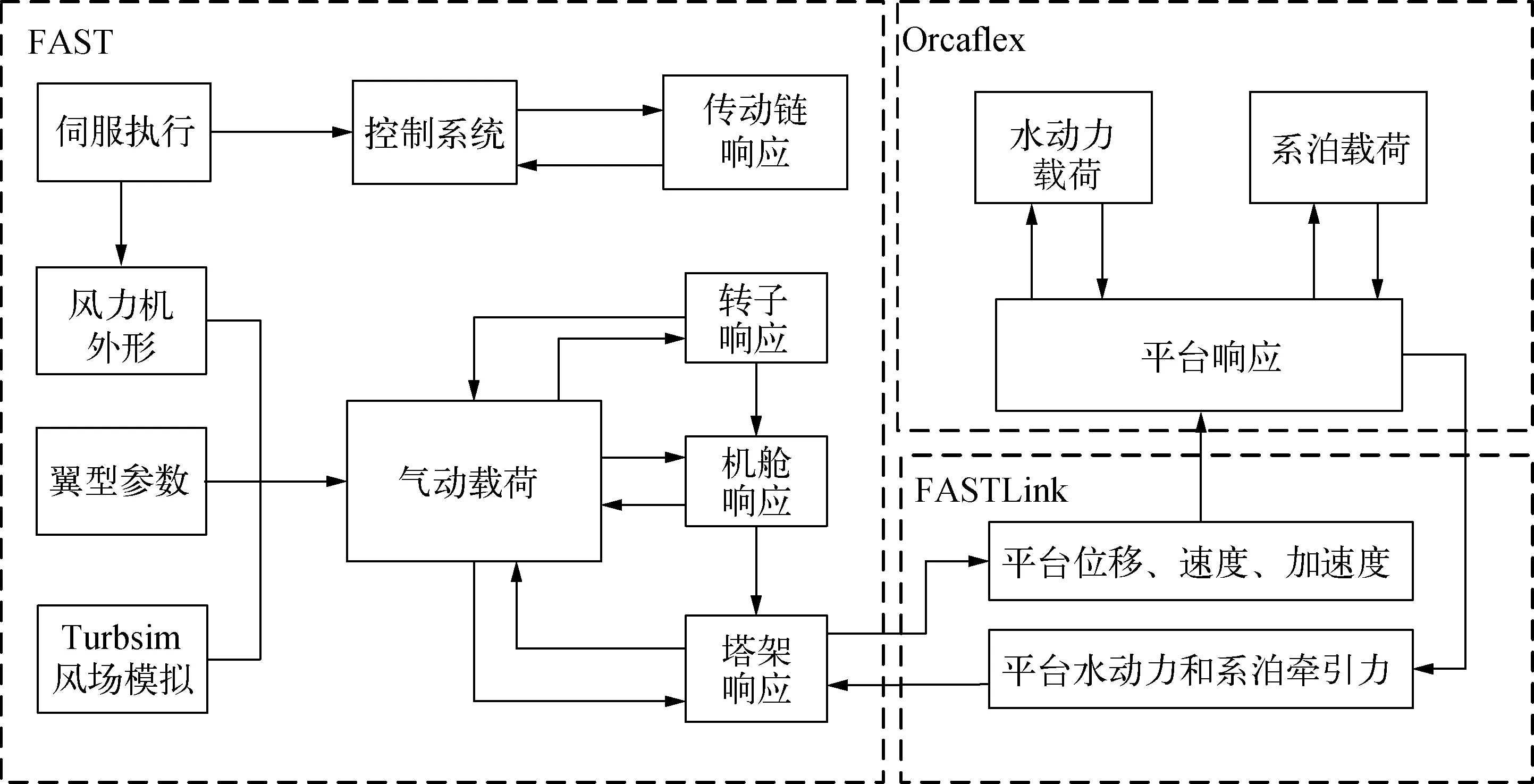
圖2 耦合分析流程圖Fig. 2 Flow diagram of coupling analysis
2 數值計算模型
2.1 海上浮式風力機模型參數
以OC4 DeepCwind半潛式浮式風力機[14]為研究對象,風力機模型是NREL設計的5 MW開源風力機,整體模型如圖3所示,具體參數見文獻[15]。
圖3 OC4 DeepCwind浮式風力機系統示意Fig. 3 OC4 DeepCwind floating offshore wind turbine
參照模型相關數據[15]進行建模,風力機平臺主要由浮力艙、橫支撐桿及斜支撐桿組成。浮式平臺主要參數如表1所示,風力機主要參數如表2所示。
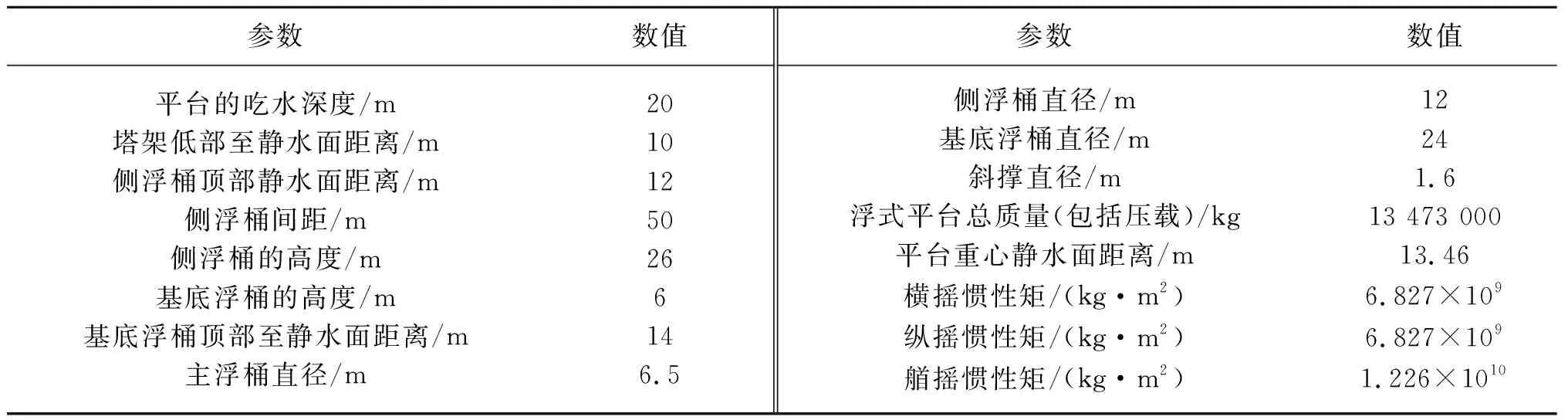
表1 浮式平臺主要參數
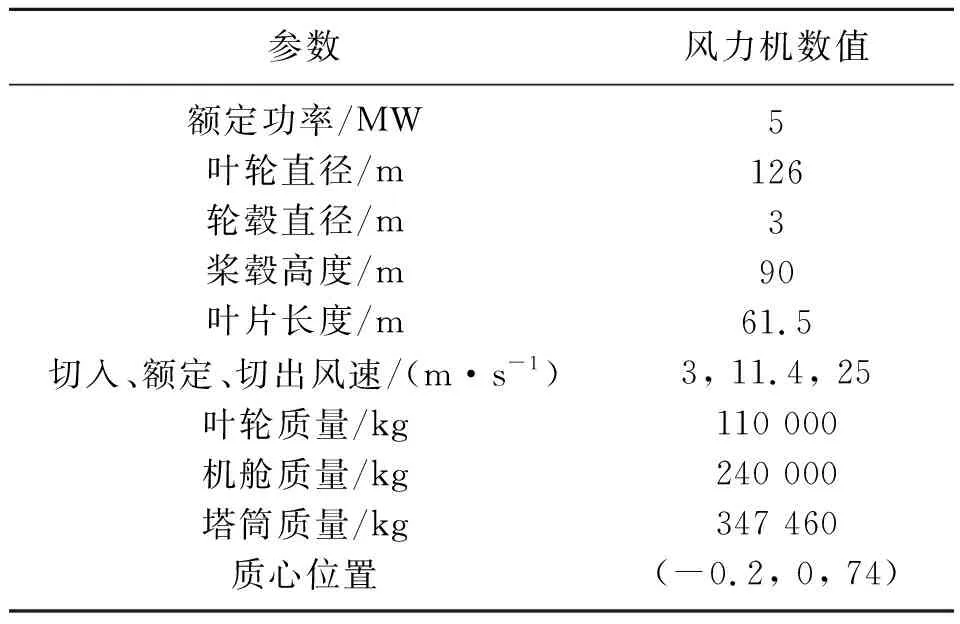
表2 風力機主要參數
2.2 系泊錨鏈參數及布置方式
OC4 DeepCwind 半潛式浮式風力機系泊系統,通過3組懸鏈線式錨鏈進行鏈接固定于海底,每根錨鏈與浮式平臺導纜孔連接,并沿中心立柱軸向均勻分布。表3為系泊系統相關參數,系泊平面布置如圖4所示。
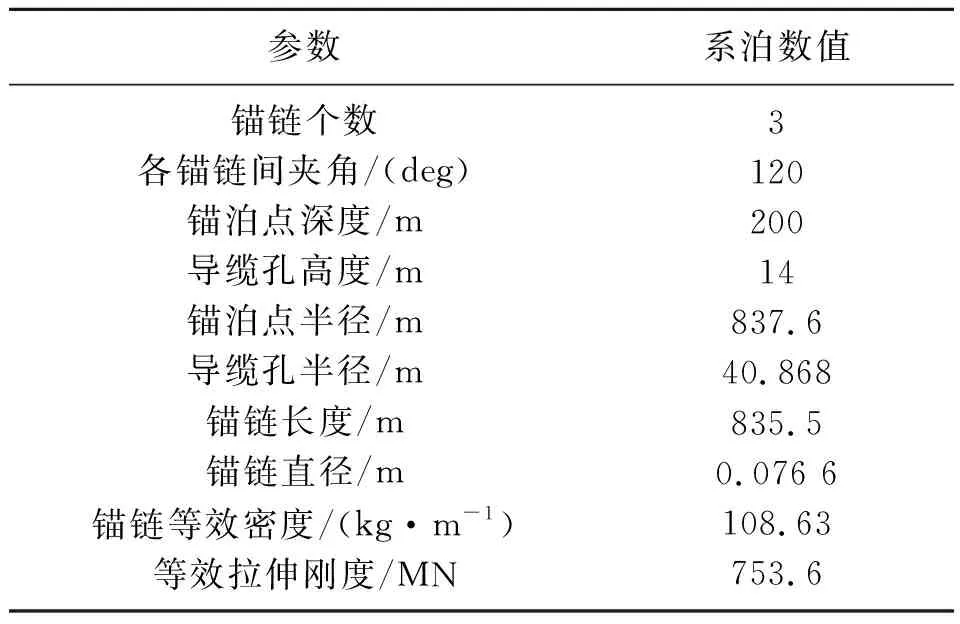
表3 系泊系統主要參數
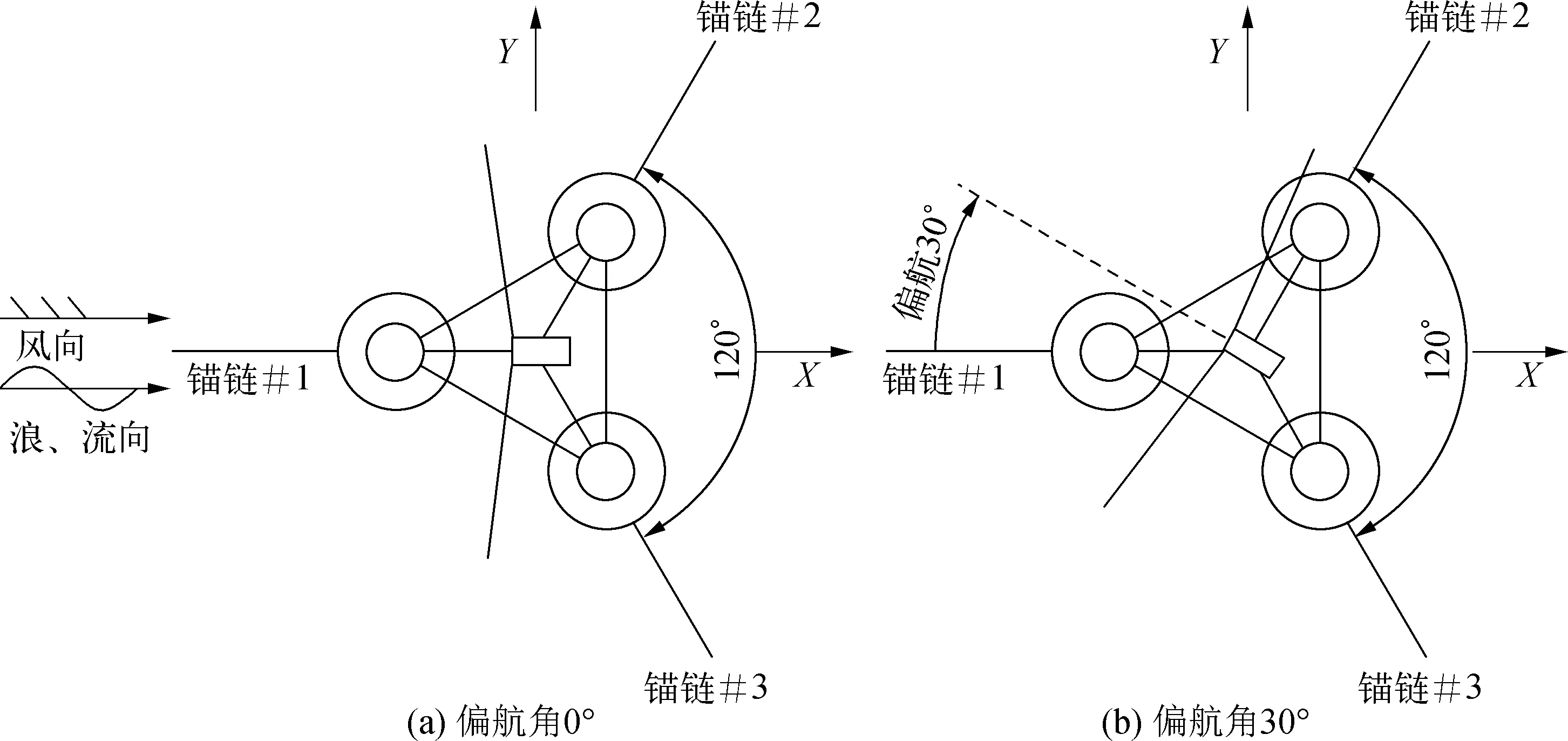
圖4 系泊錨鏈布置及風力機偏航示意Fig. 4 Schematic diagram of mooring chain arrangement and yaw of wind turbine
2.3 環境條件
在額定風速工況下,考慮風浪流載荷共同影響,選取中國南海某海域環境工況。氣動載荷輸入選擇湍流風,Kaimal風譜,輪轂高處平均風速11.4 m/s,波浪載荷[16]選擇JONSWAP 譜,有效波高2.5 m,譜峰周期7 s,流速取0.8 m/s,工作水深200 m,風浪流方向相同均取0°(沿x軸正方向,如圖4所示),浮式風力機偏航角依次從0°到30°,每隔5°取一個工況進行計算,風力機偏航時會產生傾斜尾跡效應,FAST的氣動模塊中考慮了傾斜尾跡修正模型,盡可能地捕捉傾斜尾跡效應。為準確模擬浮式風力機各系統之間的耦合效應,每個工況計算模擬總時長3 500 s,時間步長設置為0.01 s,具體工況參數見表4。

表4 工況參數
2.4 模型驗證
自由衰減運動數值模擬可以驗證耦合數值模擬方法在浮式結構物水動力求解問題上的可靠性[17],對平臺縱蕩、垂蕩、縱搖三個方向自由度進行了自由衰減運動數值模擬,縱蕩、垂蕩、縱搖初始位移分別為22 m、6 m、8°,在對某一個自由度進行自由衰減模擬時,將其他自由度固定,風力機系統在自身重力和系泊錨鏈的作用下,平臺偏離平衡位置后,具有恢復平衡的趨勢,受到流體阻尼的影響平臺運動的振蕩幅值逐漸減小,最終趨于平衡。模擬結果與文獻[18]中MARIN水池試驗數據及FAST V8.10模擬計算結果進行比較,吻合度較好(見圖5所示)。證明了軟件建模以及耦合數值仿真的可靠性。
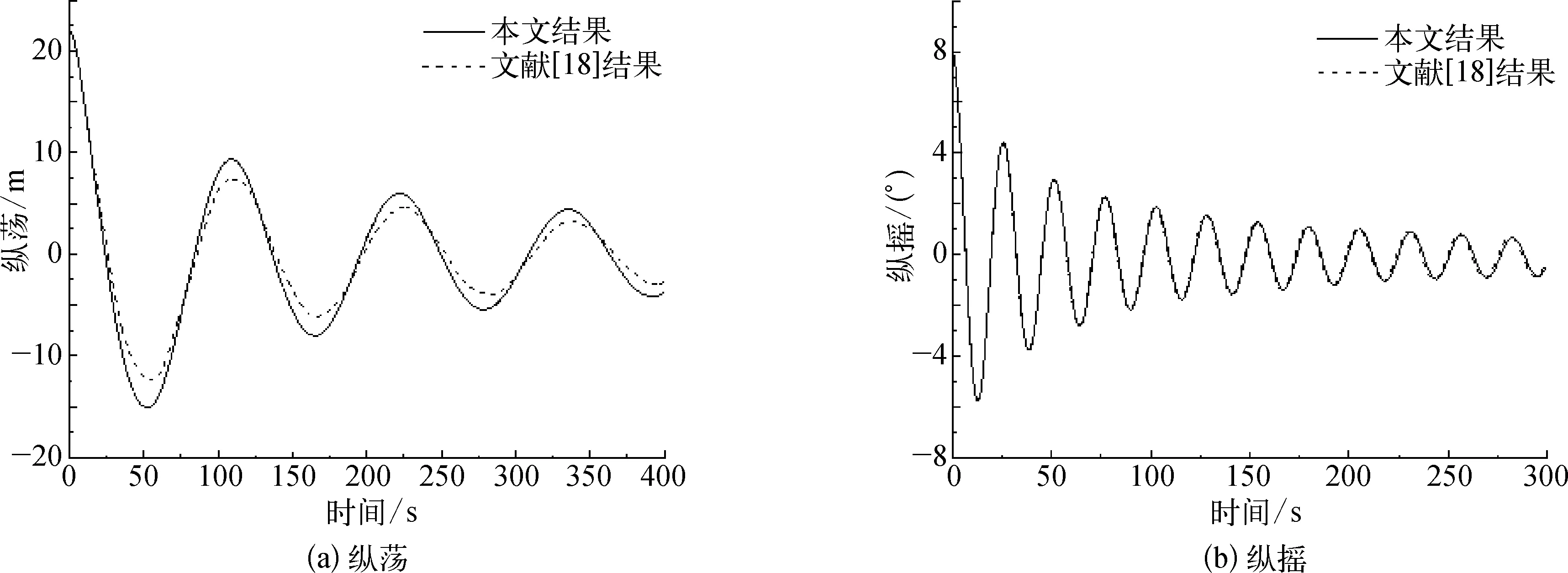
圖5 平臺自由衰減運動對比Fig. 5 Comparison of platform free attenuation motion
3 結果分析
相較于固定式風力機,海上浮式風力機受風浪流等環境載荷的共同影響,存在較明顯的陀螺力矩效應(見圖6所示),使得偏航工況下風力機平臺的運動響應更加復雜。由圖7可知,偏航工況對浮式風力機平臺縱蕩及縱搖方向運動響應影響較大,對垂蕩方向運動響應影響較小,隨風力機偏航角度增加,支撐平臺縱蕩及縱搖運動響應平均值減小,垂蕩方向運動響應變化較小。由表5可知,在額定風速工況下,風力機偏航5°、10°、15°、20°、25°、30°時的縱蕩方向運動響應平均值,相較于偏航0°時分別下降0.65%、2.50%、5.51%、9.52%、14.77%、20.68%;縱搖方向運動響應平均值分別下降0.83%、4.21%、10.01%、17.6%、27.13%、37.36%,平臺縱蕩、縱搖響應的標準差也呈現減小趨勢。主要由于偏航角度增大,葉輪承受的法向氣動載荷減小,導致風力機整體承受載荷減弱,進而使得平臺在縱蕩和縱搖方向的運動響應減小,其運動幅值隨之降低,風力機運動響應趨于相對平穩狀態。風力機垂蕩方向主要受風力機系統自身重力載荷影響,因此運行狀態下垂蕩方向運動響應變化較小。
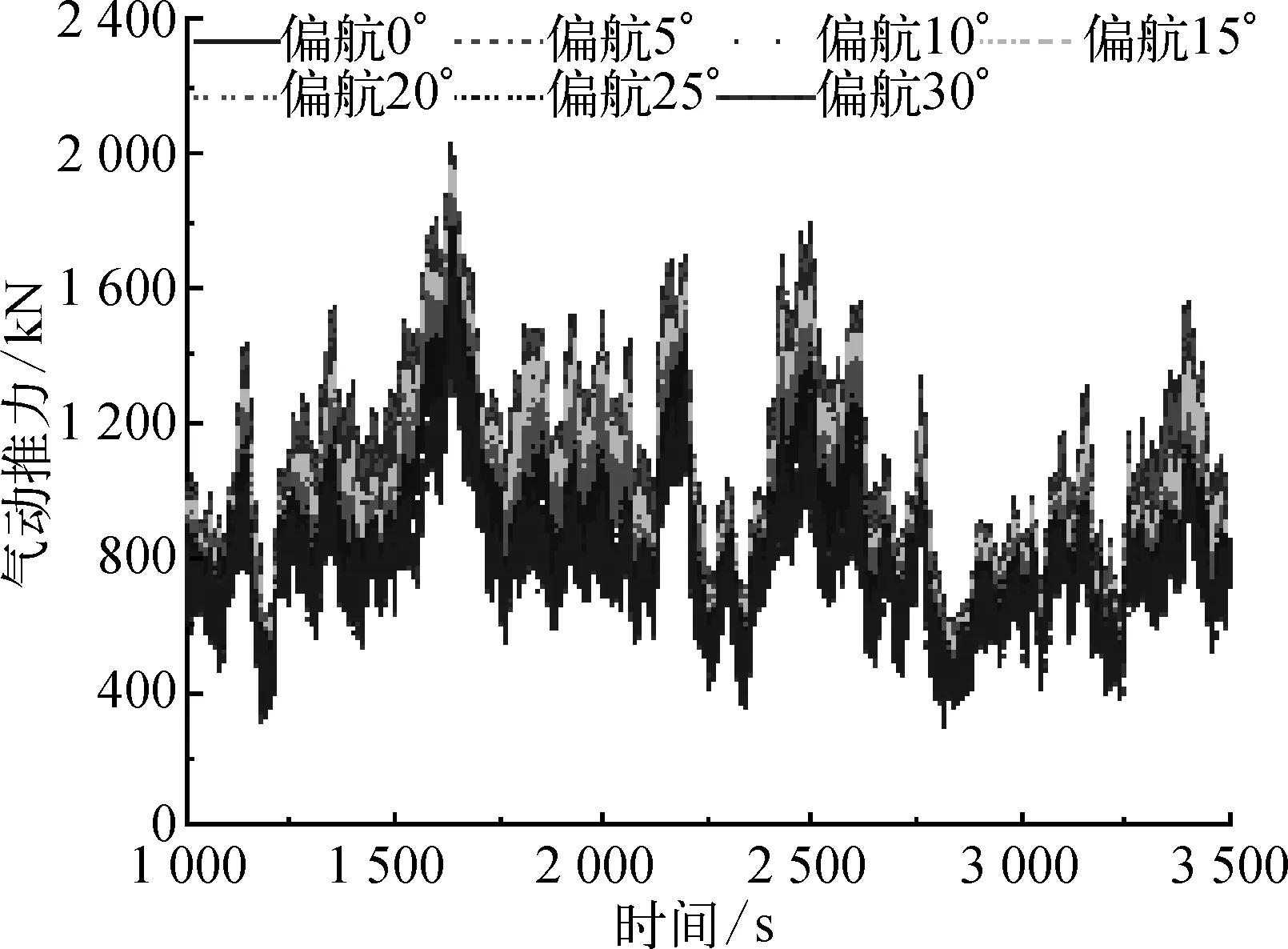
圖6 氣動推力時程曲線Fig. 6 Aerodynamic thrust time history curve
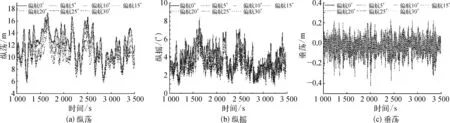
圖7 風力機基礎運動響應時程曲線Fig. 7 Time history curve of motion response of wind turbine platform
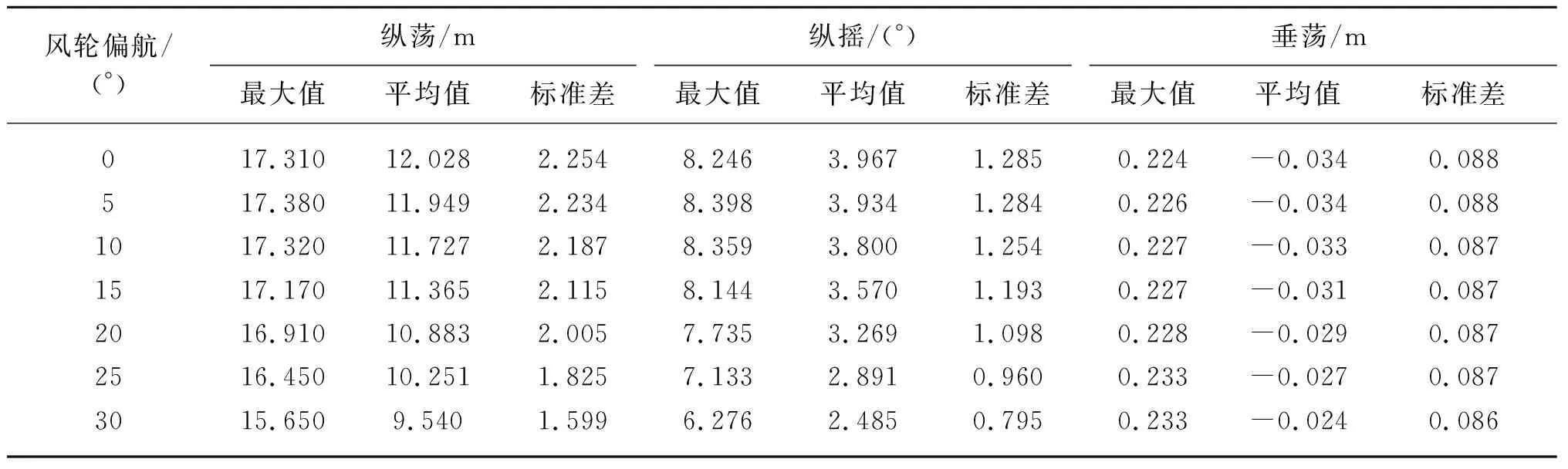
表5 風力機基礎運動響應數值統計
3.1 平臺水動力性能分析
3.2 系泊動力響應分析
系泊系統作為海上浮式風力機定位的重要組成部分,其可靠性直接影響風電場發電效率。風力機偏航不僅影響平臺六自由度的運動響應,同時也影響系泊錨鏈張力變化。由圖8可知,隨偏航角度增加,錨鏈#1有效張力平均值降低,這是由于氣動載荷在錨鏈#1方向的分力隨著偏航角增大而減小導致;錨鏈#2和錨鏈#3表現卻有差異,隨偏航角度增加,錨鏈#2張力均值增加,錨鏈#3張力均值有所下降但變化幅值較小,這是因為偏航工況下,風輪盤法向受到的氣動推力逐漸減小,氣動推力影響浮式風力機平臺搖蕩運動的平均位移,進而影響不同位置錨鏈張力的變化。
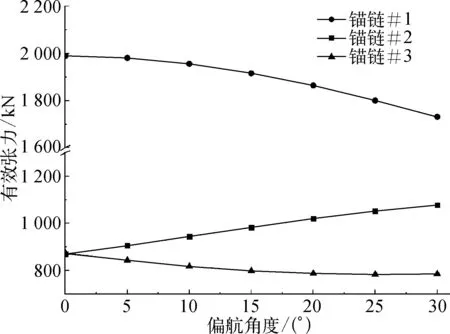
圖8 錨鏈有效張力平均值變化Fig. 8 Variation of average effective tension of anchor chain
表6為系泊錨鏈張力響應數字特征統計。隨偏航角度增大,錨鏈#1有效張力平均值下降明顯,偏航30°時,有效張力降低了258.5 kN,相較于偏航0°時降低12.98%,最大值變化可達378.61 kN,其張力標準差隨偏航角度增大呈減小趨勢,主要原因是錨鏈#1布置方向沿平臺縱蕩方向,受到風浪流載荷的同時作用,偏航角度變化對縱蕩運動影響明顯,進而導致錨鏈#1張力平均值變化最大,隨偏航角增加,風力機縱蕩方向運動響應幅度減小,造成錨鏈#1張力變化減弱,故其張力標準差減小;錨鏈#3張力平均值變化較小,僅有88.3 kN,偏航30°時,其臥鏈長度最大,故此時張力平均值最低;風力機偏航30°時,錨鏈#2張力平均值增加了208.21 kN,相較于偏航0°時增大23.94%;因錨鏈#2臥鏈長度受平臺縱蕩和橫蕩運動影響,故其張力平均值變化很大;錨鏈#2與錨鏈#3沿風浪流方向對稱排布,受環境載荷影響較小,因此相較于錨鏈#1,錨鏈#2、#3張力標準差變化不大(圖9為偏航前后平臺及錨鏈位移變化)。綜上所述,風力機發生偏航會明顯影響系泊錨鏈載荷,其變化趨勢與平臺運動及系泊布置有關,平臺縱蕩運動對錨鏈載荷影響較大,建議在浮式風力機系泊設計時考慮偏航工況造成的疲勞損傷。
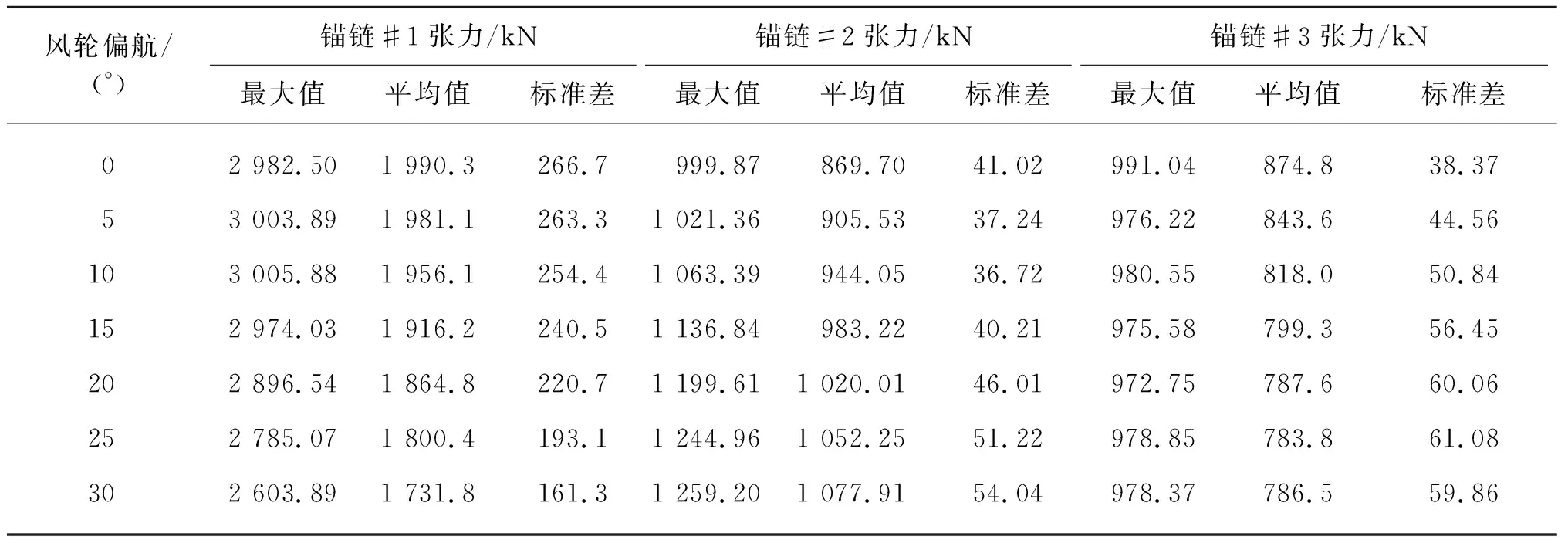
表6 錨鏈有效張力數字特征統計

圖9 系泊錨鏈動態變化趨勢Fig. 9 Dynamic change trend of mooring chain
4 結 語
建立海上浮式風力機水—氣動力耦合分析模型,考慮湍流風場的非定常性,對不同偏航工況下風力機基礎運動響應系泊錨鏈載荷對應關系進行分析,探究偏航工況對海上浮式風力機基礎運動響應及錨鏈載荷影響,得到結論如下:
1) 額定風速工況下,風力機偏航對支撐平臺縱蕩和縱搖方向的運動響應影響較大,隨偏航角度增加,縱蕩和縱搖運動響應減小,偏航30°時縱蕩和縱搖平均值比偏航0°時分別下降20.68%和37.36%。垂蕩運動響應受風力機偏航影響較小;
2) 風力機偏航對錨泊載荷有明顯影響,隨偏航角度增加,錨鏈#1有效張力平均值降低,錨鏈#2卻有所增加,偏航30°時錨鏈#1張力平均值比偏航0°時降低12.98%,錨鏈#2增加了23.94%,錨鏈#3有效張力平均值受風力機偏航影響較小;
3) 偏航工況下,錨泊載荷變化趨勢與平臺運動及錨鏈布置有關,沿風浪流載荷方向布置的錨鏈載荷受風力機偏航工況影響較大,建議在錨鏈設計階段考慮風力機偏航對系泊系統造成的疲勞損傷。