基于ECMS和Radau偽譜拼接法的多模式HEV能量管理策略優化*
2022-02-24 16:20:14趙克剛麥茂瑜李梓棋劉延偉甄玉珂
汽車技術 2022年2期
趙克剛 麥茂瑜 李梓棋 劉延偉 甄玉珂
(1.華南理工大學,廣州 510641;2.廣東工業大學,廣州 510006)
主題詞:混合動力汽車 能量管理策略 等效燃油消耗最小策略 Radau偽譜拼接法
1 前言
在混合動力車型開發中,評價混合動力系統的節油潛力時,需要確定相應的能量管理策略,測試其在復雜工況下的燃油經濟性表現。
目前,混合動力汽車的能量管理策略主要分為基于邏輯規則的控制策略和基于優化算法的能量管理策略。基于邏輯規則的控制策略具有實現簡單、計算效率高等優點,但邏輯規則的設立依賴研發人員的經驗,且移植性較差。趙利軍等人采用不同的規則和算法,對混合動力系統工作區域和模式切換策略進行了優化。黃康等人將模式區分度作為優化目標,通過多目標粒子群優化算法改善了邏輯門限邊界附近工作點過于密集引起的模式切換頻繁問題,但該方法要求邏輯門劃分合理,依賴于研究人員的開發經驗。
基于優化算法的能量管理策略通過各種算法對目標函數進行優化,獲得最佳的控制效果。隗寒冰等人根據動態規劃算法的優化結果,提取動力總成的工作模式切換規則,應用于電量消耗-維持策略,改善了油耗和排放表現。趙治國等人通過遍歷算法確定所有混合動力系統工作點的最佳工作模式,在新歐洲駕駛循環(New European Driving Cycle,NEDC)工況下,燃油經濟性有所提升。林歆悠等人基于等效燃油消耗最小策略(Equivalent fuel Consumption Minimization Strategy,ECMS)算法獲取各模式切換邊界曲線,通過遺傳算法對模式切換沖擊度進行優化,在保持整車經濟性的同時提高了模式切換品質。以上大部分方法均基于NEDC或類似的簡單循環工況開展研究,隨著能耗法規不斷加嚴,需要將測試工況更換為速度變化更頻繁、波動范圍更大的全球統一輕型車輛測試循環(Worldwide Lightduty Test Cycle,WLTC)工況,現有的優化方法主要考慮油耗優化,對模式切換頻度的關注不足,會導致工作模式頻繁切換,大幅降低燃油經濟性評價結果的可靠性。
本文以一款串并聯式插電式混合動力汽車(Plugin Hybrid Electric Vehicle,PHEV)為研究對象,建立車輛動力學模型,通過ECMS 方法確定其在WLTC 工況下的模式切換序列,然后應用Radau 偽譜拼接法(Radau Pseudo-spectral Knotting Method,RPKM)求解最優模式切換時刻和油耗表現,改善因ECMS方法追求瞬時最優造成的模式頻繁切換問題。
2 多模式混合動力系統模型
串并聯式混合動力方案結合了串聯和并聯2種混合動力結構方案的優點,工作模式更多,動力源工作組合更全面,同時也增加了模式切換策略的優化難度。本文研究的串并聯式混合動力系統結構如圖1所示,發動機與起動∕發電一體化電機(Integrated Starter Generator,ISG)通過離合器串聯,構成輔助動力單元(Auxiliary Power Unit,APU),與驅動電機通過減速機構并聯,動力均經減速機構傳遞至驅動輪。
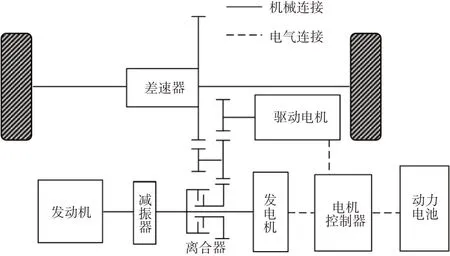
圖1 串并聯式混合動力系統構型
通過控制各動力源和離合器的工作狀態,整車工作模式可分為純電動模式、并聯模式、串聯模式和制動能量回收模式,其中并聯模式包含了純發動機工作模式。整車及動力系統主要參數如表1所示。
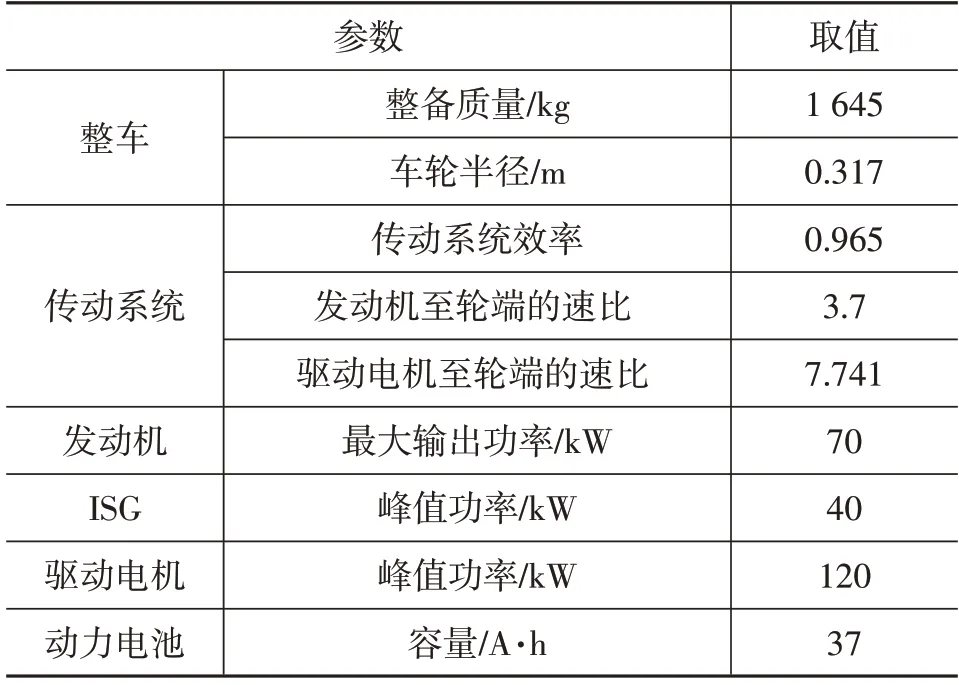
表1 整車及動力系統主要參數
為提高計算效率,各部件建模可采用后向建模方法,根據各系統部件的穩態響應,通過試驗數據建立準靜態模型。
2.1 工作模式
根據系統部件的啟停狀態,分為多種工作模式:
a.純電驅動模式。此模式下,動力電池輸出電能至驅動電機驅動車輪,適合車速較低、負載較小,且動力電池荷電狀態(State of Charge,SOC)較高的工況,避免發動機運行在非經濟區域。
b.串聯驅動模式。此模式可以分為2 種情況:APU和動力電池混合驅動模式,即當行駛工況需求功率較大時,動力電池與APU 共同輸出電能至驅動電機驅動車輪;APU 驅動兼充電模式,即當行駛工況功率需求較小時,APU向驅動電機供能的同時為動力電池充電。
c.并聯模式。發動機和驅動電機通過扭矩耦合裝置共同驅動車輪,適合在車速較大、負載較重且動力電池SOC較高的工況下啟用。
d.再生制動模式。在汽車減速制動時分離離合器,驅動電機反轉,利用制動轉矩發電,為動力電池充電。
2.2 發動機模型
通過試驗測定在不同工況點下發動機的輸入和輸出特性,記錄發動機在不同節氣門開度下的輸出轉速、輸出轉矩和瞬時燃油消耗率等,采用最小二乘法建立發動機的萬有特性曲線,反映發動機的燃油消耗率與轉矩、轉速之間的函數關系,如圖2所示。
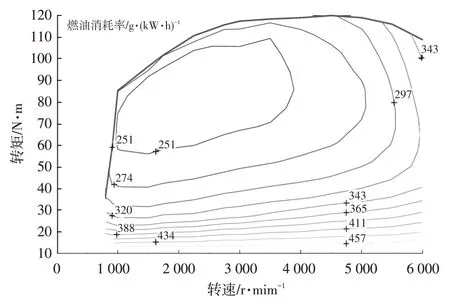
圖2 發動機穩態特性模型
燃油消耗量通過對燃油消耗率積分獲得:

式中,為燃油消耗量;為燃油消耗率;、分別為發動機輸出功率和轉矩;為發動機轉速。
2.3 驅動電機和ISG模型
與發動機建模同理,忽略內部能量變化及動態響應過程,根據試驗數據,建立驅動電機、ISG 不同輸出轉速、轉矩下的效率模型,如圖3和圖4所示。

圖3 ISG效率模型
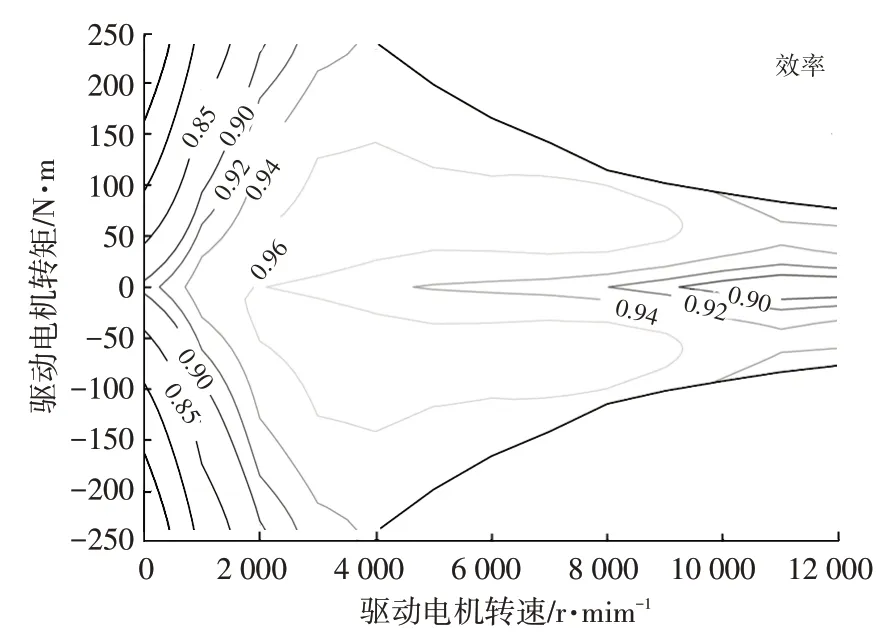
圖4 驅動電機效率模型
2.4 動力電池模型
忽略動力電池內部復雜的電化學反應和外部溫度影響,基于充、放電試驗,將動力電池簡化為等效內阻模型,等效電路如圖5所示,其中,為動力電池的充、放電電流,為內阻,為開路電壓,為負載電壓。

圖5 等效電路結構
不考慮溫度等因素對電壓、電阻的影響,認為電壓僅受電池SOC 變化的影響,電阻受電池SOC 變化和充、放電狀態的影響,動力電池的負載電壓為:



式中,()為時刻的電池SOC 值;、分別為動力電池的額定容量和瞬時功率。
2.5 整車縱向動力學模型
只考慮車輛縱向行駛工況及其控制,忽略其橫向運動及操縱穩定性影響,進行縱向動力學分析。車輛行駛過程中的行駛阻力包括滾動阻力、空氣阻力、坡度阻力和加速阻力,汽車行駛方程可表示為:

式中,為驅動力;為車輛整備質量;為重力加速度;為路面阻力系數;C為空氣阻力系數;為迎風面積;為坡度角;為汽車旋轉質量換算系數,根據開發試驗經驗,取=1.05;為車速;d∕d為行駛加速度。
根據整車力矩平衡,可得力矩平衡方程為:

式中,為車輪半徑;、分別為驅動電機和機械式制動器的輸出力矩;、分別為發動機和驅動電機到輪端的速比;為傳動系統效率。
3 基于ECMS的模式切換序列
ECMS 是通過建立動力電池電耗和發動機油耗的等效關系,將油耗和電耗轉化為一個性能指標進行優化,本質是求解每一步長的瞬時最優油耗及其對應的模式和功率分配比,但逐步尋優容易陷入局部最優,不一定能獲得整個測試工況下的全局最優解。
3.1 性能指標方程
將測試工況以1 s為步長劃分成段,ECMS的性能目標可表示為:

式中,為測試工況下的總燃油消耗量;()為時刻發動機的燃油消耗量;()為時刻通過油電轉換系數將動力電池電耗進行換算得到的等效燃油消耗量。
3.2 狀態變量方程
以動力電池SOC 為狀態變量,根據動力電池模型,狀態轉移方程用式(3)表示。
3.3 控制變量
控制變量為功率分配系數,代表動力電池輸出功率占需求功率的比值,可表示為:
控制變量步長的選擇會影響算法的精度和求解時間,本文控制變量步長選取為0.01。在制動能量回收模式下,以當前制動能量回收水平,回收效率一般不超過30%,此時分配比范圍限制為0≤()<0.3。
為避免電耗的轉換方式對結果產生影響,應保證SOC在測試工況始末一致,以總的燃油消耗量作為整車燃油經濟性評價指標。因此引入二分法對全局油電轉換系數進行調整,首先根據控制算法得到整個工況的SOC 曲線,通過比較始末狀態SOC,對全局油電轉換系數進行調整,然后采用控制算法重新獲取SOC 曲線,直至始末SOC差值小于容許誤差=0.001。
3.4 WLTC工況下模式切換序列提取
國家第六階段機動車污染物排放標準中采用WLTC工況,其與NEDC工況的對比如圖6所示。
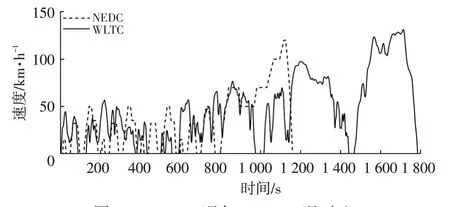
圖6 WLTC工況與NEDC工況對比
相比NEDC 工況,WLTC 工況的行駛車速由穩態變化調整為瞬態變化,行駛工況不斷波動。2種行駛工況的特征參數如表2 所示。可以看出,WLTC 工況下,加、減速工況占比增加,最高車速和最大加速度均有所提高,速度、加速度變化范圍更大,測試更全面。

表2 行駛工況特征參數
WLTC工況下的全局油電轉換系數為=275,ECMS算法下的整個混合動力系統的驅動狀態工作點分布情況如圖7所示,由于ECMS算法追求的是逐步油耗最優,因此圖中存在明顯的模式切換邊界。低速工況下車輛采用純電動模式,在中高速工況下,負荷較小時采用串聯模式,負荷較大時采用并聯模式。
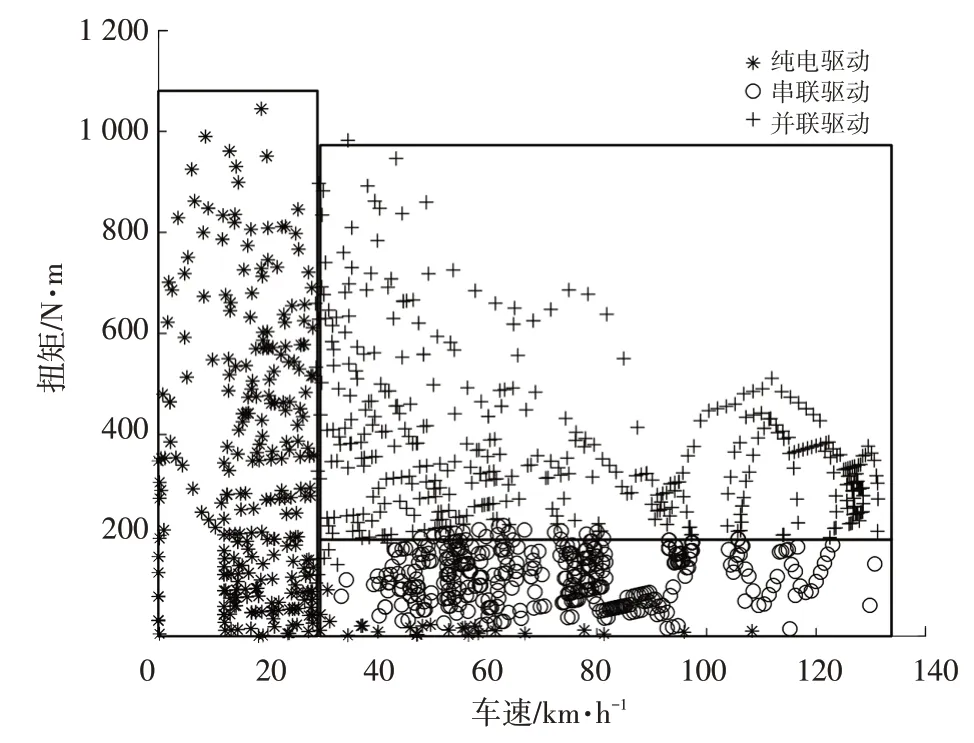
圖7 驅動狀態工作點分布情況
由于存在模式切換邊界,隨著測試工況更改為速度波動更頻繁的WLTC工況,不可避免地會出現工作點圍繞模式切換邊界波動,導致模式頻繁切換的問題,在實際行駛中大幅降低動力系統使用壽命和行駛平順性,同時也會帶來額外的油耗損失。
為改善ECMS 算法作為瞬時優化算法帶來的模式頻繁切換問題,可以ECMS算法結果為階段及模式切換序列的劃分依據,通過RPKM 求解各階段優化結果,建立ECMS-RPKM算法,其流程如圖8所示。對速度波動較小、ECMS算法下模式切換較平穩的階段以及制動能量回收階段,可不經RPKM優化。
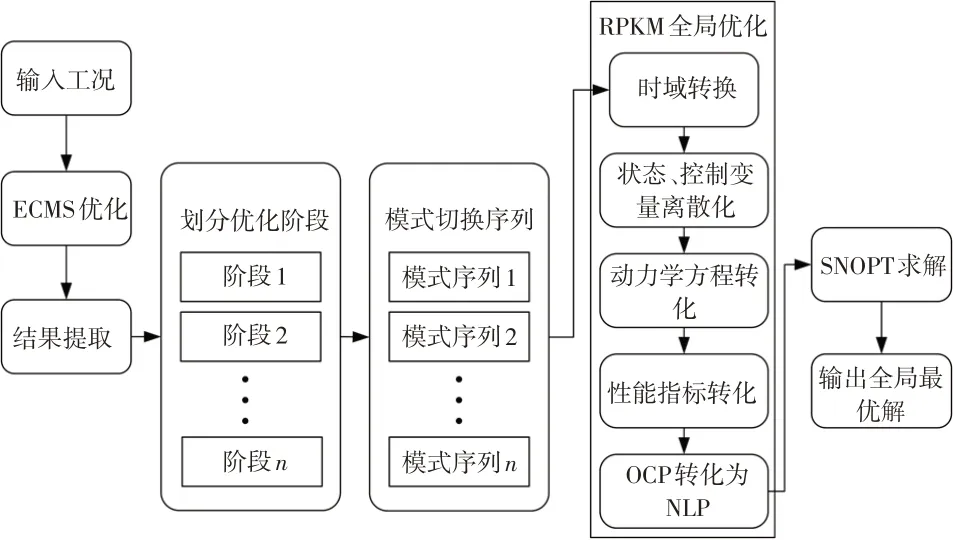
圖8 ECMS-RPKM算法流程
根據ECMS 算法結果提取的WLTC 工況的模式切換待優化時間區域以及模式切換序列如表3所示。
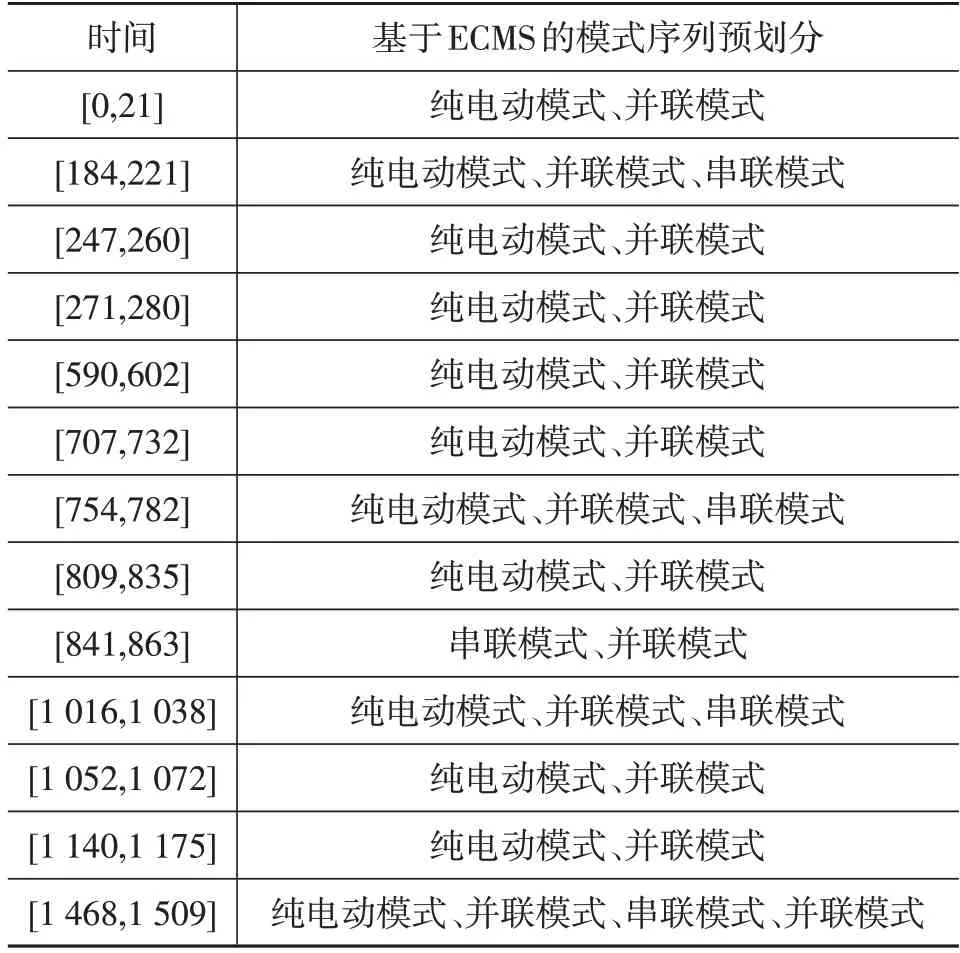
表3 WLTC工況模式切換待優化時間區域及序列 s
4 基于RPKM的全局優化
RPKM作為一種典型直接法,其原理是通過對最優控制問題(Optimal Control Problem,OCP)進行離散化并對控制變量和狀態變量進行拉格朗日(Lagrange)全局插值多項式逼近,將原OCP 轉化為非線性規劃問題(Nonlinear Programming Problem,NLP)進行快速求解,能夠得到多模式混合動力能量管理問題所屬的博爾扎(Bolza)型最優控制問題的全局最優解。由于混合動力汽車在模式切換處出現控制函數、狀態函數突變,為減少在突變點配點數過多引起的求解效率和求解精度下降問題,需將原非光滑的最優控制問題在不連續處,即ECMS各模式切換序列的始末時間點處,劃分為不同段落,分段求解再拼接。RPKM需要預先劃分模式序列,對各階段始末狀態變量進行估計預賦值,可根據ECMS結果給出。
4.1 時域轉換
RPKM 采用勒讓德-高斯-拉道(Legendre-Gauss-Radau,LGR)配點,配點所在區間為(-1,1],節點所在區間為[-1,1]。首先根據ECMS 獲得的模式切換待優化序列,將測試工況劃分為個階段,各分段點依次為,,…,T。接著將每個時間階段[T,T]轉換到勒讓德(Legendre)正交多項式的定義區間∈[-1,1]:

4.2 狀態變量和控制變量離散化
在第個時間階段,選取LGR 配點數量為N,分別為階Legendre 正交多項式P()的N個根(τ,τ,…,τ,),P()表示為:

取N個配點以及階段初始時刻為節點,則第個時間階段的節點數量為(N+1),節點記為τ,其中=0,1,…,N。在節點處將各階段狀態變量S()離散化為S,對各階段控制變量分配比μ(),只需在配點處離散化為μ:
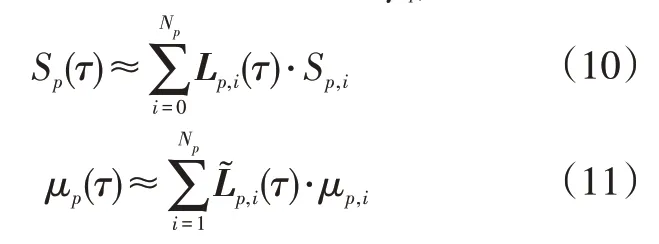
離散化后的狀態變量和控制變量分別通過(N+1)和N個Lagrange插值多項式來逼近:
4.3 動力學方程轉化
經過配點與離散化后,對狀態方程求解一階導數可得:

第個時間階段的配點記為τ,其中=1,2,…,N。將式(10)、式(11)和式(14)代入式(8)可得:



結合式(3)、式(15)和式(16),OCP的動力學方程在第階段配點τ處可以轉化成代數方程:
式中,(τ)為在配點τ處電池輸出功率,由工作模式和分配比確定。
4.4 性能指標轉化
式(6)中性能指標包括發動機的油耗和動力電池的電耗,屬于Bolza型性能指標,可轉化為:

式中,為結束時間;、分別為動力電池的初始和結束時刻SOC。
對第階段,將含有積分項的性能指標通過高斯-拉道(Gauss-Radau)積分方法可近似為:
4.5 最優控制問題轉化為非線性規劃問題
將各階段拼接起來,即可將原混合動力模式最優控制問題轉化為非線性規劃問題,即
該非線性規劃問題可通過SNOPT大型非線性求解器進行求解。
5 優化結果及分析
在WLTC 工況下,ECMS 算法與ECMS-RPKM 聯合算法的最優狀態變量和模式切換情況如圖9和圖10所示。其中模式0~模式4 分別代表停車、串聯模式、并聯模式、純電動模式、制動能量回收模式。
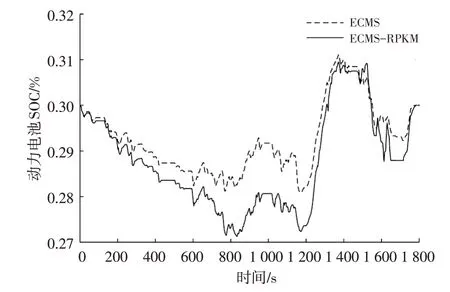
圖9 2種算法的WLTC工況最優狀態變量曲線
圖10 中:在第1 015 s 前的中低速工況,ECMS 算法SOC 曲線變化較小,但該階段發動機轉速較低,充電效率較低;在第1 015~1 467 s 的高速工況區間,ECMSRPKM聯合算法下動力電池SOC上升較多,充電主要集中在第1 200~1 330 s區間,此時車速較高且載荷相對穩定,ECMS-RPKM 聯合算法通過串聯模式進行充電,效率較高;第1 467~1 790 s 的超高速工況下2 種算法的SOC 曲線變化趨勢相似。從圖10 中可以看出,ECMSRPKM算法下各模式切換次數明顯減少。
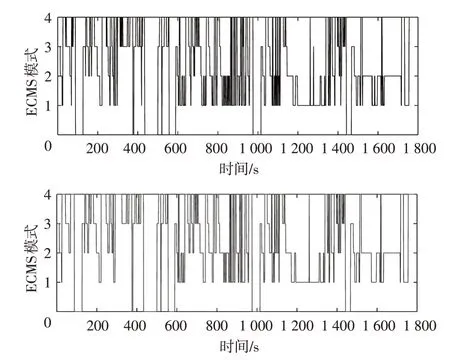
圖10 WLTC工況模式切換對比
ECMS 和ECMS-RPKM 聯合算法控制下的發動機和驅動電機工作點分布分別如圖11和圖12所示。
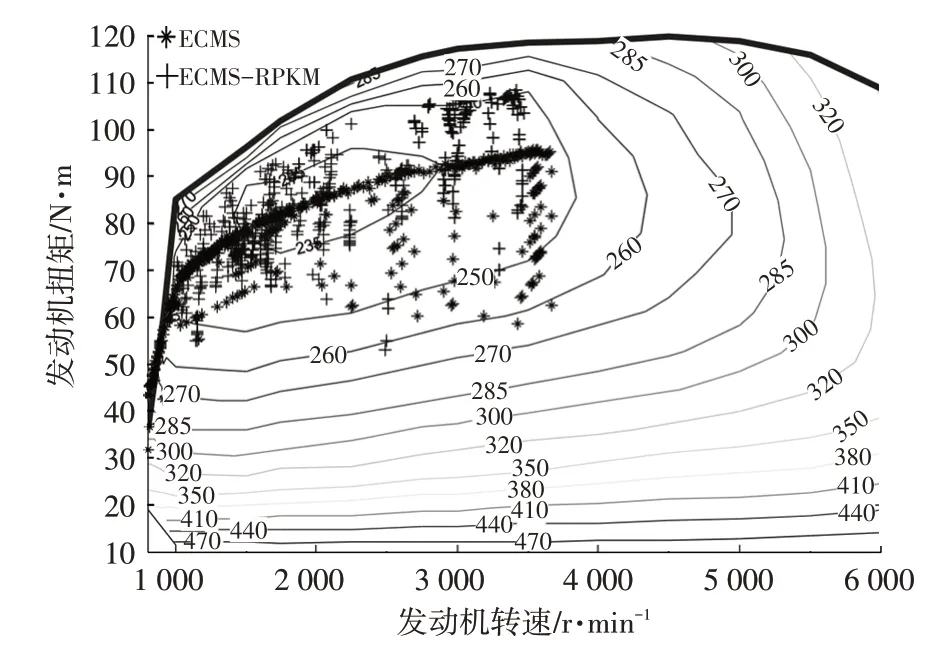
圖11 發動機工作點對比
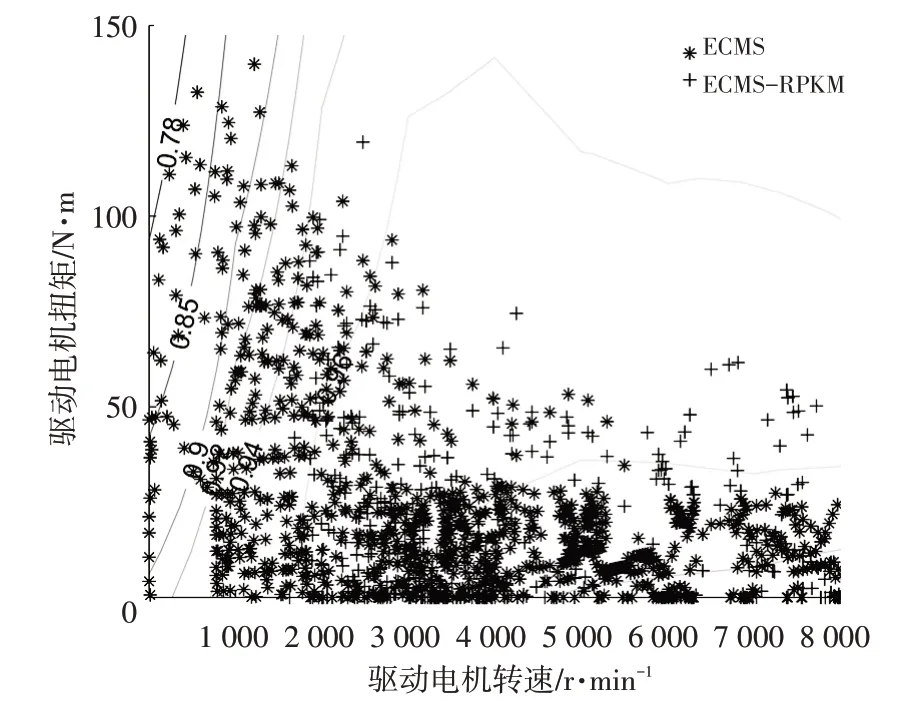
圖12 驅動電機工作點對比
圖11、圖12 的分析結果與上述對SOC 變化曲線的分析結果一致。ECMS 算法在低速和中速工況下發動機工作點較多,且分布集中,說明中低速下主要采用串聯模式,能量在發動機和動力電池之間多次轉換,能量損失相對較多。在ECMS-RPKM 聯合算法控制下,中、低速工況充電頻率較低,發動機主要運行在并聯模式,在高速工況下積極使用發動機發電為動力電池補充電能。因此ECMS-RPKM 聯合算法對燃油經濟性的評價結果比ECMS算法更合理,可以作為混合動力系統節油潛力的評價依據。
在保證燃油經濟性評價可靠性的同時,ECMSRPKM 聯合算法還改善了ECMS 算法作為瞬時優化算法時只追求單步最優解而出現的模式切換頻繁問題。ECMS-RPKM聯合算法控制下混合動力系統的工作點分布如圖13 所示。與ECMS 算法明顯的模式切換邊界不同,ECMS-RPKM聯合算法控制下各模式工作點的邊界出現重疊區域,作為模式切換的緩沖區,見圖13。
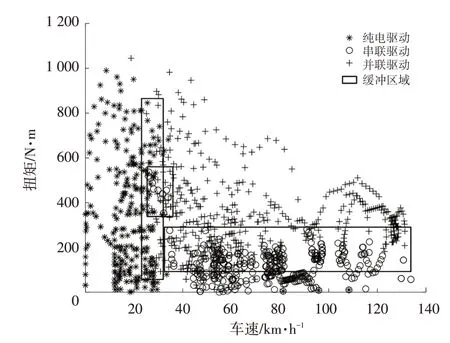
圖13 ECMS-RPKM算法下工作點分布
當工作點在緩沖區波動時,ECMS-RPKM聯合算法下車輛模式可維持不變,避免模式切換頻繁,各緩沖區具體工作范圍如表3所示。
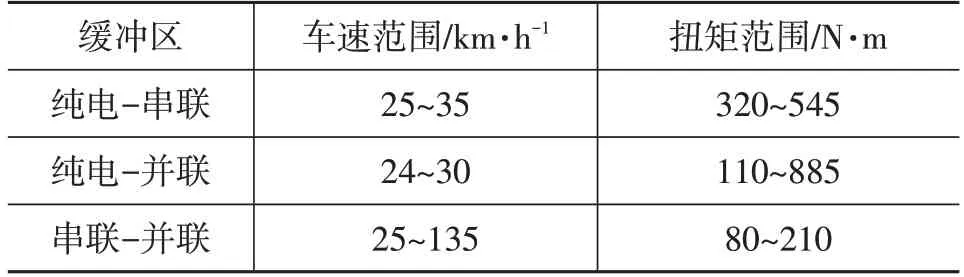
表3 緩沖區工作范圍
2 種算法的求解結果對比如表4 所示。ECMSRPKM 聯合算法在模式切換緩沖區間內維持模式不變,雖然導致瞬時油耗存在一定程度的升高,但通過全局優化得到的油耗仍低于ECMS 算法,燃油經濟性提高了1.23%。同時,ECMS-RPKM 聯合算法控制下發動機的起停次數和離合器的分離與接合次數明顯降低,大幅改善了模式切換頻繁問題。
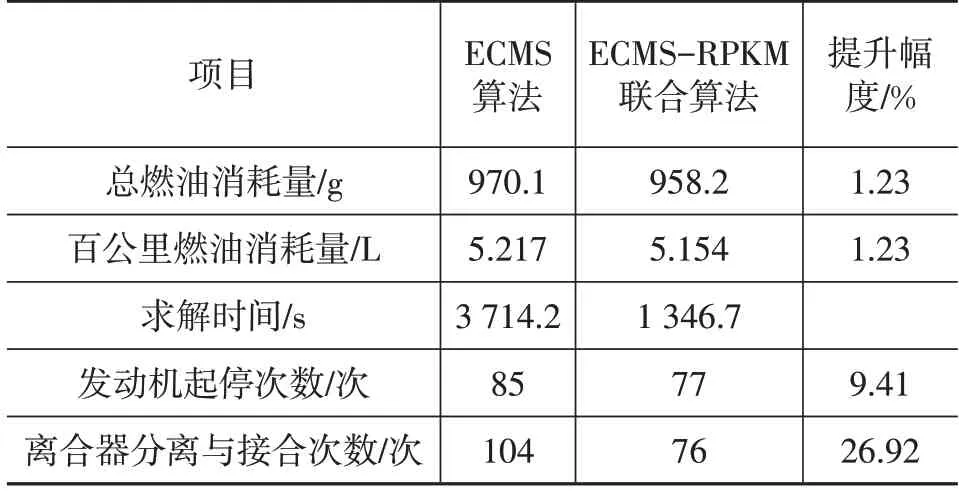
表4 2種算法求解結果對比
6 結束語
本文以一款串并聯式混合動力汽車為研究對象,根據ECMS 算法的優化結果,提取WLTC 工況下的模式切換序列,應用Radau偽譜拼接法對具體模式切換時刻和功率分配比進行優化,獲得WLTC 工況下最優模式控制策略和油耗表現。根據仿真結果分析,該ECMSRPKM 聯合算法可有效改善ECMS 算法在WLTC 工況下的模式頻繁切換問題,發動機起停次數和離合器的分離與接合次數分別降低9.41%和26.92%。同時,通過該方法可獲得整個工況下的全局最優解,燃油消耗量相比ECMS 降低1.23%,求解時間較短,可作為復雜工況下多混合動力系統節油潛力的評價方法,滿足車型快速開發需求。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代企業(2015年2期)2015-02-28 18:45:09
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15