SINS/GPS組合導航系統研究
2022-02-09 02:04:48梁娜,丁丹
計算機仿真 2022年12期
關鍵詞:系統
梁 娜,丁 丹
(航天工程大學電子與光學工程系,北京101416)
1 引言
每一種導航系統均存在優勢和弊端,很難使得每項性能指標都符合預期要求,然而若綜合各個獨立系統的優缺點進行優劣互補,并將現代信息融合方法加以改進和應用,則會組合成為更高精度、更高可靠性的組合導航系統。本文研究的SINS/GPS組合導航系統正是在此背景下提出的,其中捷聯慣性導航系統(SINS)的高自主性能夠彌補全球定位系統(Global Positioning System,GPS)無法工作時的導航任務[1],從而實現連續導航,而 GPS的高精度性可以有效修正SINS輸出數據,從而避免誤差積累問題。目前,航天3所、航天12所、航天13所、航空618所、北京航空航天大學、南京航空航天大學、哈爾濱工業大學和西北工業大學等多家科研院所、高等院校均開展了SINS/GPS組合導航理論算法研究和實體系統樣機研制等工作,相關學者就組合導航的硬件設計、誤差估計技術、系統建模、數據融合算法等多方面內容做了大量深入的研究,通過分析,慣性傳感器精度和誤差補償技術會直接影響組合導航系統的定位精度。本文的創新之處在于:使用MEMS(Micro-Electro-Mechanical System,微電子機械系統)慣性元器件設計SINS子系統,使用高度計修正GPS高度數據,使用FFPGA完成慣性元器件和高度計采集數據的降噪預處理,使用DSP對接收到的FPGA數據做野點剔除、溫度補償處理,然后依次完成SINS解算、GPS報文解析和Kalman濾波解算。
2 慣性導航
測量載體線運動和角運動參數后解算得到速度、位置以及姿態的一種導航方法。主要元器件是陀螺儀和加速度計,兩類傳感器均與載體固連,輸入軸嚴格正交并與機體坐標系嚴格一致。給定初始化位置、速度和姿態角后便能循環迭代進行導航解算:姿態信息解算方法包括歐拉角法、方向余弦法和四元數法[2];速度信息由求解比力方程獲得;速度積分后得到位置信息。
3 衛星導航
發射臺放在衛星上的一種無線電導航方法。發射信號可以概括為“我是哪顆衛星,我現在的位置在哪,我發出信號時的準確時刻是什么”[3],根據電磁波速度乘以接收信號和發射信號的時間差,就得到接收機到衛星的距離。考慮到接收機石英鐘相對衛星原子鐘的誤差,所以計算得到的距離并不是真實距離,是包含有光速乘以接收機鐘差的偽距。偽距定位方程如下
其中(x,y,z)為待確定的用戶位置,(xi,yi,zi)為星歷確定的衛星的位置,i=1,2,3,4,c為光速,ti為已知的衛星時鐘,t0為待確定的用戶時鐘,ρi為偽距。
4 組合導航
4.1 組合模式
4.1.1 重調法
重調法有兩種工作方式:一是在GPS工作期間信任GPS的輸出信息,即用GPS的輸出數據作為SINS此刻的輸出,而在GPS不能正常工作時,SINS的輸出是在上一時刻GPS數據的基礎上進行的,這是一種最簡單的組合方式,在低動態運動情形下SINS的輸出實際上是由GPS確定的;二是對SINS和GPS解算的數據做加權平均,根據慣導器件的精度和解算算法的精度分別給GPS和SINS數據賦以適當的加權系數[4],如圖1所示。這兩種方式均未對SINS的誤差展開及時的修正工作,因此隨著SINS慣導誤差的積累,系統工作效果不佳。
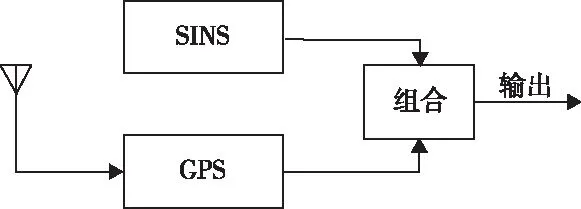
圖1 加權平均
4.1.2 松組合
組合導航系統的融合技術主要采用的是卡爾曼濾波技術,其原理框圖如圖2所示。松組合模式的狀態值為SINS導航參數的誤差量,量測值為GPS和SINS輸出的速度、位置數據對應的差值[5],通過組合導航濾波器估計得到SINS的姿態誤差、速度誤差、位置誤差及慣性元器件誤差,用這些誤差對SINS展開校正,最后輸出的是誤差被修正后的SINS導航參數。松組合模式的最大優勢是在能保證一定的精度時工程性較強[6]。
4.1.3 緊組合
緊組合模式是一種稍微復雜的組合方式,相較松組合中的GPS與SINS是彼此獨立的,緊組合中兩者均不能進行單獨的解算工作,常采用偽距、偽距率的組合形式,其原理框圖如圖3所示。狀態值除了SINS導航參數的誤差量外,還有GPS接收機時鐘誤差,量測值為GPS和SINS輸出的偽距、偽距率數據對應的差值[7],其中SINS的偽距和偽距率由GPS給出的星歷數據結合SINS的位置速度數據計算得到,通過組合導航濾波器估計得到SINS的導航參數誤差、慣性元器件誤差和GPS接收機鐘差,最后輸出的是誤差被修正后的SINS導航參數。緊組合模式優勢是利用衛星的數目可以少于四顆,抗干擾能力強,缺點是計算量隨著卡爾曼濾波狀態量維數的增加而迅速增加[8]。
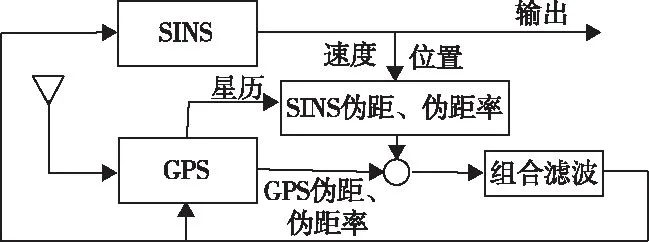
圖3 偽距、偽距率組合
4.2 組合導航系統應用
4.2.1 系統硬件設計
本文研制的GPS/SINS組合導航系統硬件方案如圖4所示。主要包括的子模塊有:集成電源模塊、9自由度MEMS慣性傳感器模塊、FPGA模塊、DSP模塊、高度計模塊、GPS模塊、與上位機通信模塊等[9]。9自由度MEMS慣性傳感器模塊包括三軸加速度計、三軸陀螺儀、三軸磁阻傳感器,其中FPGA模塊通過SPI總線接收加速度計和陀螺儀的數據[10],通過I2C總線接收磁阻傳感器的數據;另外FPGA通過I2C總線采集高度計信息;FPGA將所有傳感器數據存入移位寄存器,通過SPI方式傳給DSP。GPS通過串口把GPS定位數據發送給DSP,所有傳感器信息匯集在DSP中后完成姿態解算、數據融合等算法。DSP可以選擇RJ45網口或者RS232串口的方式將導航數據傳給上位機。
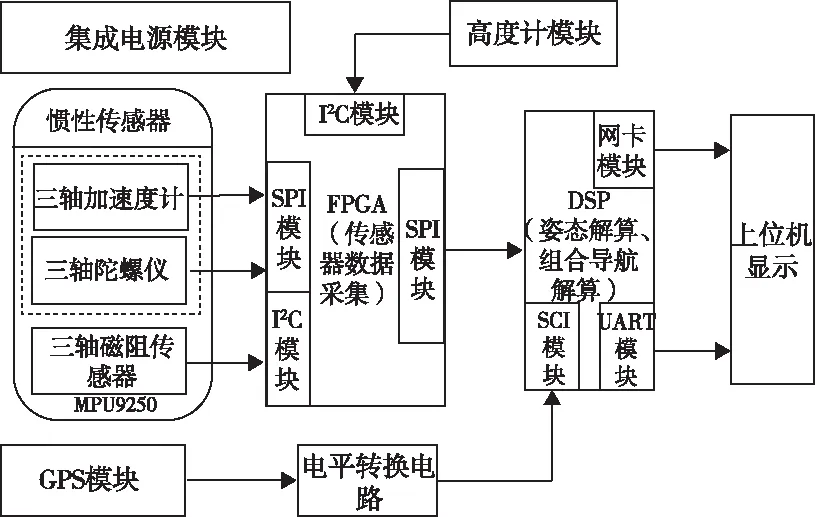
圖4 系統硬件方案
SINS-GNSS組合導航系統硬件實物如圖5所示,系統分為兩層,主要包括底板、DSP核心板、FPGA系統板和傳感器系統板四部分,底板包括電源電路、網口通信電路、串口通信電路、GPS導航模塊;DSP核心板包含DSP處理器、外部RAM和FLASH等[11];FPGA系統板包括FPGA處理器、FPGA程序下載電路;傳感器系統板主要是9自由度MEMS慣性傳感器MPU9250電路、高度計電路、9自由度MEMS慣性傳感器ADIS16405預留接口電路。FFPGA完成對傳感器信號采集、均值降噪預處理;DSP完成與上位機的網口和串口通信、陀螺信號降噪、陀螺零位溫漂補償、磁阻電子羅盤測量及最佳橢圓誤差校正、慣導數據解算以及慣導數據和GPS導航數據的Kalman濾波融合等。
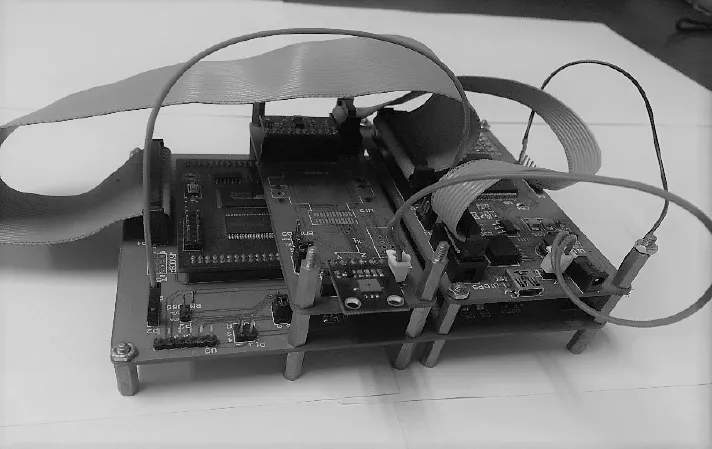
圖5 原型樣機裝配后實物圖
在設計系統底板時,考慮到各模塊要單獨調試,增加了GPS連接跳線和串口連接跳線,可以使GPS信號直接傳到上位機,對GPS信號接收和解讀調試[12]。底板供電設計了兩個供電接口,可以用5V的DC電源供電,也可以通過USB接口供電,并且增加了兩個電源插針,可以通過杜邦線為其它設備提供5V電源。DSP和上位機通信方式,主要以網口RJ45通信為主,并以串口RS232作為備用通信方式,均完成了通信調試。提供多種DSP與FPGA通信方式,主要以SPI方式為主,并留有雙端口RAM接口[13]。具體的底板接口功能如圖6所示。
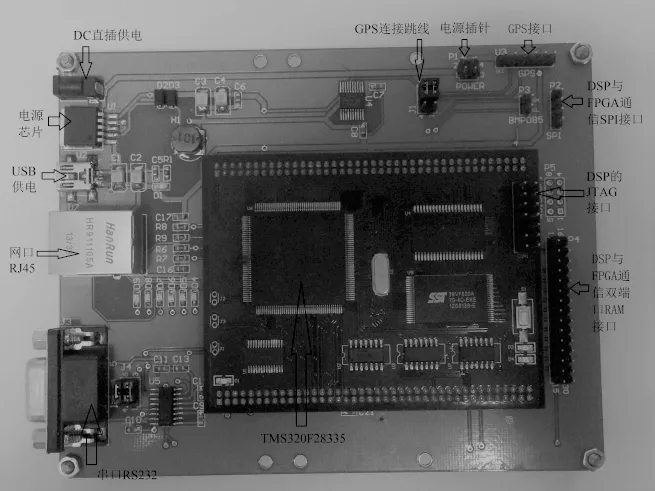
圖6 系統底板實物圖
FPGA最小系統板的供電方式與底板相同,即5V的DC直插電源和USB接口供電任選其一。FPGA主要通過SPI接口與DSP通信,但留有雙端口RAM接口,如需采用雙端口RAM方式與DSP通信,只需在FPGA中編程實現即可[14]。具體功能如圖7所示。
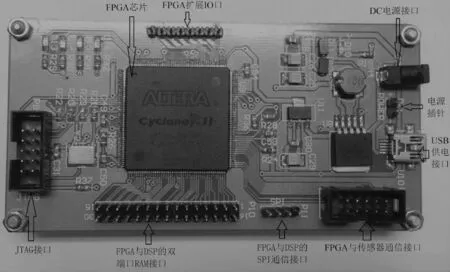
圖7 FPGA最小系統模塊電路板實物圖
本文設計的組合導航系統傳感器模塊兼容9自由度MEMS慣性傳感器MPU9250和ADIS16405兩種傳感器,MPU9250價格便宜,接口簡單易操作,本文設計的組合導航系統樣機在算法驗證階段采用該傳感器。ADIS16405精度較高,但價格昂貴,在原理樣機所有功能實現且工作穩定后,可以直接換成該傳感器,只要更改相應的數據接收程序即可,可再次提高系統的精度。高度計增加了線路選擇跳線[15],方便數據傳輸調試。如圖8所示,傳感器與FPGA通信接口1傳輸的為MPU9250和高度計數據,傳感器與FPGA通信接口2傳輸的為ADIS16405和高度計數據。

圖8 傳感器模塊電路板實物圖
4.2.2 系統軟件設計
FPGA軟件設計的主要任務是實現SPI總線和I2C總線功能,其中SPI總線接收加速度計、陀螺儀數據,而I2C總線接收磁阻傳感器、高度計數據;DSP作為系統的核心單元,其軟件流程為:首先需要編寫系統初始化指令,然后利用SPI接收FPGA傳來的數據,其中FPGA作為從控制器聽從于DSP的時鐘指令,接著對接收到的數據做進一步的野點剔除、溫度補償處理[16],進而進行SINS初始對準解算、SINS姿態解算、GPS報文解析、Kalman濾波解算,最后完成對W5100的配置、與上位機的網口進行通信。整體方案流程如圖9所示,其中Kalman濾波解算在GPS與SINS的松組合模式下進行。

圖9 系統軟件流程圖
組合導航系統性能指標見表1。

表1 系統整體性能參數圖
5 結論
本文研究的SINS/GPS組合導航系統是在歐美等西方國家限制向我國出售高精度SINS和我國北斗衛星導航系統較快發展的背景下提出的,一方面彌補SINS技術中的不足,另一方面為以后北斗與SINS的結合奠定基礎。本文研制的小型SINS/GPS組合導航系統,實現了10米定位精度、80Hz帶寬、2°姿態角精度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32