近地空間短波紅外恒星探測信噪比分析方法*
2022-02-03 10:24:38汪洪源王秉文毛曉楠
飛控與探測 2022年5期
關鍵詞:背景
汪洪源,王秉文,毛曉楠,2
(1. 哈爾濱工業大學 空間光學工程研究中心·哈爾濱·150001;2.上海航天控制技術研究所·上海·201109)
0 引 言
全球定位系統(Global Positioning System,GPS)廣泛應用于坦克、飛機以及艦船的導航,GPS不受戰場煙霧、云層以及沙塵的影響,可以全天候、全天時工作,定位精度高;但GPS易受電磁干擾,且在戰時一旦GPS的衛星星座遭受敵方攻擊,GPS將會喪失部分功能,甚至有可能完全癱瘓[1]。慣性導航系統(Inertial Navigation System,INS)彌補了GPS的不足,INS完全自主、隱蔽性好、短時精度高且數據輸出率高,但其長時間運行會產生漂移誤差[2-3]。目前,坦克、飛機以及艦船主要使用GPS和INS組合進行導航,GPS用于實現對INS漂移誤差的周期性校準[4]。綜上,亟需尋找一個可以替代GPS的備用導航定位系統,以便在戰時當GPS不可用時,該備用導航定位系統可以實現對INS漂移誤差的快速校準,或者該備用導航定位系統可以不依賴INS而完成自主定姿定位。
作為光測設備的星敏感器受背景雜光的影響較大,所以以往星敏感器僅用于衛星、宇宙飛船、火箭等空間航天器的導航[5-7]。近年來,隨著星慣組合導航技術的不斷發展,星敏感器導航技術正由單純的空間應用逐漸向更廣泛的空中、近地面以及海平面領域發展。由于白天天空背景輻射強烈[8-9],常見的可見光組件在近地空間的探測能力有限[10]。而相較于可見光相機,短波紅外相機在某些特定窗口處(J波段、H波段、Ks波段)的天空背景輻射強度更低、大氣透過率更高;短波紅外相機可探測的恒星數目更多;短波紅外相機的滿阱容量更大;短波紅外相機對霧、煙以及霾的敏感性更弱;短波紅外相機受白天海平面湍流的影響更小[11]。面向近地空間短波紅外星敏感器導航應用的任務需求,針對不同大氣窗口,迫切需要綜合考慮恒星目標以及天空背景特性、光學系統以及圖像傳感器參數,開展恒星探測信噪比分析方法研究。而在星敏感器恒星探測信噪比定量計算方面,現有的研究工作大多集中在可見光波段[12-13]。因此,本文提出了一種近地空間短波紅外恒星探測信噪比分析方法。首先,分析了短波紅外恒星目標與天空背景特性;其次,構建了恒星目標信號傳遞模型、天空背景信號轉換模型和恒星探測信噪比模型;最后,給定了仿真條件,設計了仿真流程,并完成了仿真試驗。
1 恒星目標與天空背景特性
1.1 恒星目標特性
(1)波段及數量
2μm全天巡天(Two Micron All Sky Survey, 2MASS)點源目錄是近地空間短波紅外星敏感器的首選星表,其包括的恒星波段及星等不大于7的恒星數量如表1所示。
(2)光譜輻照度
2MASS點源目錄中0等星的光譜輻照度如表2所示。
光譜輻照度和星等之間的關系如下
(1)
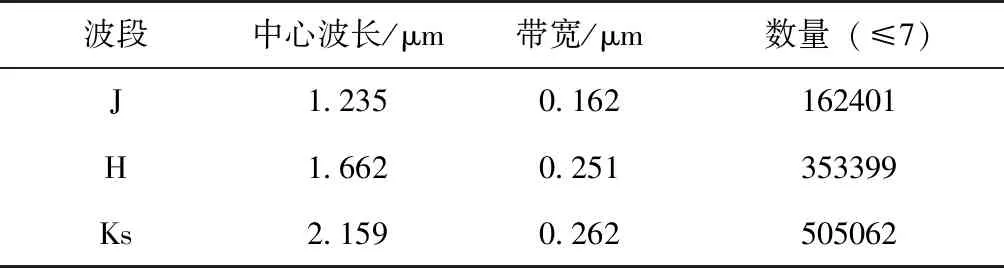
表1 2MASS點源目錄波段及數量
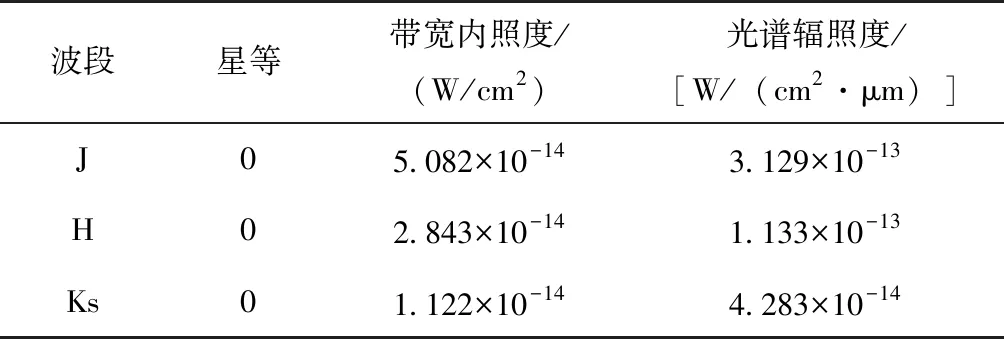
表2 2MASS點源目錄0等星光譜輻照度
式中,m表示星等;E0表示0等星的光譜輻照度;Em表示m星等的光譜輻照度。
1.2 天空背景特性
(1)大氣透過率
libRadtran是一款大氣輻射傳輸計算軟件,其可用于準確分析天空背景特性。選用的求解器為MYSTIC,大氣模式為中緯度夏季,海拔高度為0km,天頂大氣透過率的仿真結果如圖1所示。J波段和H波段處的天頂大氣透過率均為98%,略高于Ks波段處的95%。
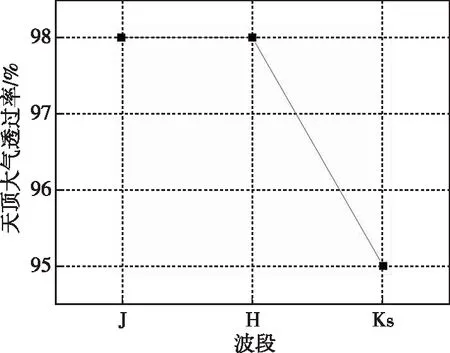
圖1 天頂大氣透過率Fig.1 Zenith atmospheric transmittance
(2)光譜輻亮度
設置觀測天頂角為30°,觀測方位角為180°,太陽天頂角分別為0°、20°、40°、60°,太陽方位角為0°,天空背景光譜輻亮度的仿真結果如圖2所示。同一太陽天頂角下,J波段下的天空背景輻亮度最大,H波段次之,Ks波段最小;同一波段下,太陽天頂角越小,天空背景輻亮度越大。
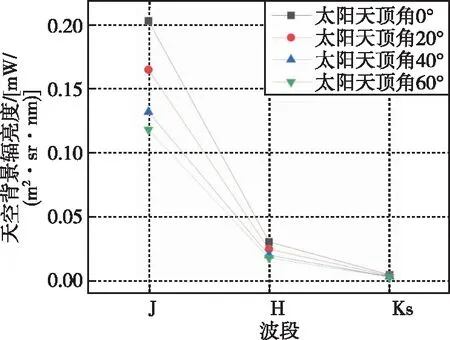
圖2 不同太陽天頂角下天空背景輻亮度Fig.2 Sky background radiance under different solar zenith angles
2 恒星探測信噪比模型構建
2.1 恒星目標信號傳遞
若已知恒星光譜輻照度、大氣透過率、光學系統參數以及圖像傳感器參數,則可定量計算出恒星目標信號經光電轉換后的等效電子數。
恒星星光信號受大氣衰減后,光譜照度水平為
Ea=Emτa
(2)
式中,τa表示大氣透過率。
再經光學系統成像后,到達圖像傳感器平面的光譜輻射通量Φs為
(3)
式中,τo表示光學系統透過率;D表示光學系統有效孔徑。
圖像傳感器在積分時間t內接收的恒星目標信號光譜光子數Ns為
(4)
式中,t表示積分時間;Eph表示單光子能量;λ表示波長;h表示普朗克常數;c表示光速。
考慮圖像傳感器的量子效率,則圖像傳感器生成的恒星星光信號光譜電子數Sλ為
(5)
式中,η表示圖像傳感器量子效率。
再考慮J、H、Ks波段的各自帶寬,則圖像傳感器生成的恒星星光信號電子數S為
(6)
式中,λ1、λ2分別表示帶寬下限和上限。
2.2 天空背景信號轉換
若已知天空背景輻亮度、光學系統參數以及圖像傳感器參數,則可定量計算出天空背景信號經光電轉換后的等效電子數。
天空背景信號經光學系統成像后,到達圖像傳感器平面的光譜輻射通量Φb為
(7)
式中,Lb表示天空背景信號光譜輻亮度;α表示圖像傳感器像元尺寸;f表示光學系統焦距。
圖像傳感器在積分時間t內接收的天空背景信號光譜光子數Nb為
(8)
考慮圖像傳感器的量子效率,則圖像傳感器生成的天空背景信號光譜電子數Bλ為
(9)
再考慮J、H、Ks波段的各自帶寬,則圖像傳感器生成的天空背景信號電子數B為
(10)
2.3 恒星探測信噪比
根據恒星目標信號電子數、天空背景信號電子數、圖像傳感器讀出噪聲以及圖像傳感器暗電流,可知近地空間短波紅外星敏感器恒星探測信噪比rSN為
(11)

3 仿真試驗及結果分析
3.1 仿真輸入條件
仿真輸入條件如表3所示。
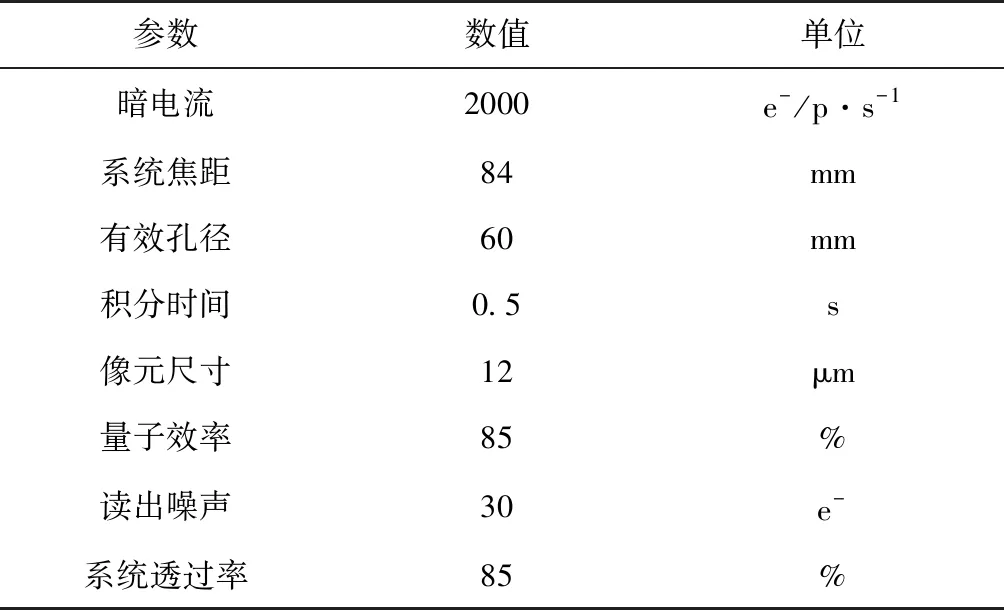
表3 仿真輸入條件
3.2 仿真流程設計
仿真實現流程如圖3所示。
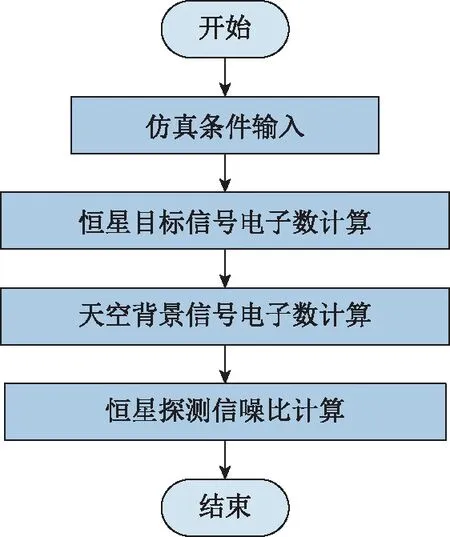
圖3 仿真試驗流程Fig.3 Simulation test flow
3.3 仿真結果分析
基于仿真輸入條件及仿真實現流程,得到不同太陽天頂角(0°、20°、40°、60°)、不同波段(J、H、Ks)、不同星等(4、5、6、7)下的恒星探測信噪比。其中,不同太陽天頂角與不同波段下4等星恒星探測信噪比如圖4所示;不同太陽天頂角與不同波段下5等星恒星探測信噪比如圖5所示;不同太陽天頂角與不同波段下6等星恒星探測信噪比如圖6所示;不同太陽天頂角與不同波段下7等星恒星探測信噪比如圖7所示。

圖4 不同太陽天頂角下4等星恒星探測信噪比Fig.4 SNR for 4 magnitude at different solar zenith angles
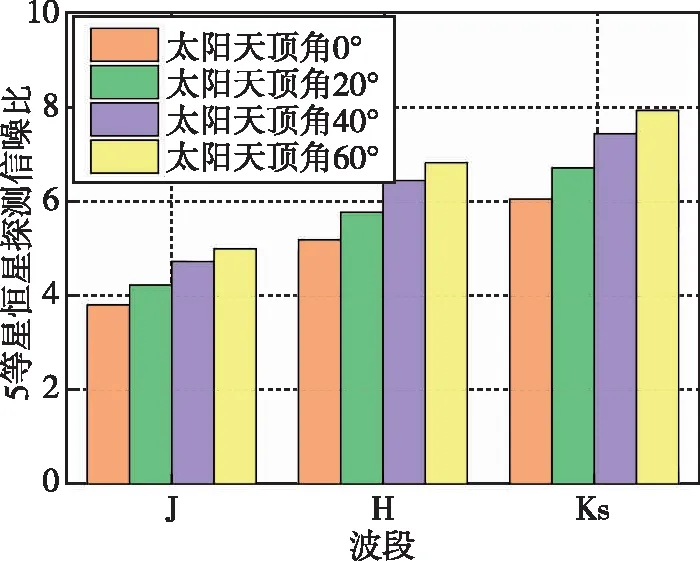
圖5 不同太陽天頂角下5等星恒星探測信噪比Fig.5 SNR for 5 magnitude at different solar zenith angles
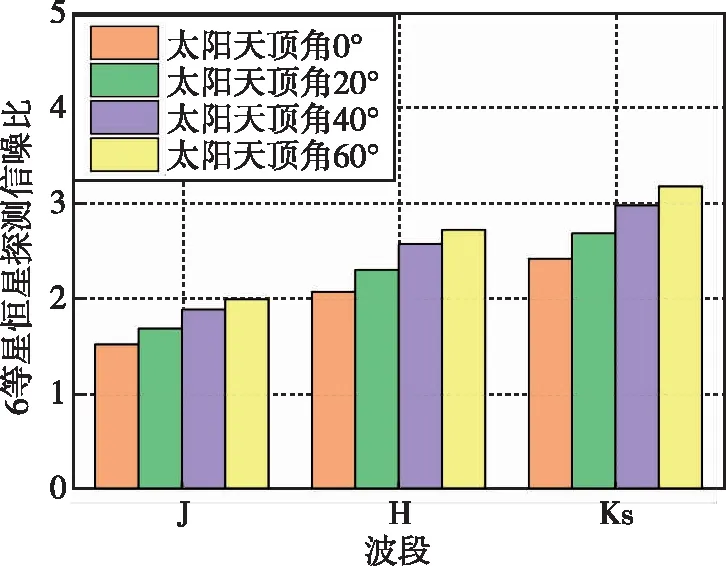
圖6 不同太陽天頂角下6等星恒星探測信噪比Fig.6 SNR for 6 magnitude at different solar zenith angles

圖7 不同太陽天頂角下7等星恒星探測信噪比Fig.7 SNR for 7 magnitude at different solar zenith angles
同一星等及太陽天頂角下,波長越長,恒星探測信噪比越大。以圖4為例,星等為4且太陽天頂角為0°時,J、H、Ks波段的恒星探測信噪比分別為9.56、13.00、15.07;星等為4且太陽天頂角為40°時,J、H、Ks波段的恒星探測信噪比分別為11.86、16.12、18.43。
同一太陽天頂角及波段下,星等越小,恒星探測信噪比越大。以圖4~圖7為例,太陽天頂角為20°且波段為J時,4、5、6、7等星的恒星探測信噪比分別為10.61、4.23、1.69、0.67;太陽天頂角為60°且波段為H時,4、5、6、7等星的恒星探測信噪比分別為17.05、6.83、2.72、1.09。
同一星等及波長下,太陽天頂角越大,即恒星與太陽之間的角距越大,恒星探測信噪比越大。以圖6為例,星等為6且波段為J時,0°、20°、40°、60°太陽天頂角的恒星探測信噪比分別為1.52、1.69、1.89、1.99;星等為6且波段為Ks時,0°、20°、40°、60°太陽天頂角的恒星探測信噪比分別為2.42、2.69、2.98、3.18。
4 結 論
面向近地空間短波紅外星敏感器導航任務需求,根據恒星目標與天空背景特性,構建了恒星探測信噪比模型。恒星探測信噪比的大小不僅與觀測波長、太陽位置、目標星等、背景強度等相關,而且還受星敏感器光學系統以及短波紅外圖像傳感器參數的影響。本文尚未考慮恒星目標與天空背景的偏振屬性,因此后續將研究矢量輻射傳輸效應下的恒星探測問題。
猜你喜歡
教學考試(高考化學)(2022年5期)2022-11-19 14:15:16
汽車工程師(2021年12期)2022-01-17 02:29:54
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
活力(2019年21期)2019-04-01 12:18:06
中國自行車(2018年10期)2018-11-30 02:09:04
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
紡織服裝流行趨勢展望(2016年1期)2016-05-04 03:45:20
語文知識(2015年11期)2015-02-28 22:01:59
中國衛生(2014年10期)2014-11-12 13:10:16