張量模型區(qū)分度函數(shù)在軸承故障診斷中的應(yīng)用
2022-01-27 15:23:10劉遠(yuǎn)紅張彥生
機(jī)械設(shè)計(jì)與制造 2022年1期
劉遠(yuǎn)紅,蔡 煜,張彥生
(東北石油大學(xué)電氣信息工程學(xué)院,黑龍江 大慶 163318)
1 引言
實(shí)際生產(chǎn)中對(duì)機(jī)器的運(yùn)行狀態(tài)進(jìn)行監(jiān)測(cè)尤為重要。在進(jìn)行滾動(dòng)軸承實(shí)時(shí)監(jiān)測(cè)時(shí)會(huì)產(chǎn)生大量的冗余信息,給分析運(yùn)算帶來巨大的計(jì)算壓力,導(dǎo)致無法及時(shí)發(fā)現(xiàn)問題、排除故障。
為了提取信號(hào)的特征頻率并應(yīng)用于故障診斷中,先后出現(xiàn)了:短時(shí)傅里葉變換[1]、小波變換[2]、S變換[3]、經(jīng)驗(yàn)?zāi)B(tài)分解[4]等信號(hào)分解方法。但是單一的信號(hào)變換方法無法有效提取軸承信號(hào)的全面特征。與此同時(shí),由于信號(hào)的數(shù)據(jù)量呈指數(shù)型增長(zhǎng),逐個(gè)處理龐大的軸承信號(hào)數(shù)據(jù)集也變得不切實(shí)際。于是許多降維算法相繼被提出:PCA算法[5]、LDA算法[6]、ISOMAP算法[7]、LTSA算法[8]、LPP算法[9]、LLE算法[10]等。但這些基于向量處理的線性或非線性降維算法也會(huì)在不同程度上導(dǎo)致信號(hào)中特征信息的丟失。
近年來,基于張量的特征提取方法陸續(xù)得到了眾多學(xué)者的關(guān)注。文獻(xiàn)[11]中利用支持向量機(jī)回歸方法機(jī)械制動(dòng)傳感器系統(tǒng)的故障診斷,而其中不包括故障類型的識(shí)別。張等人提出了多線性子空間與LLE算法相結(jié)合的MLSLLE算法,即在信號(hào)的多線性子空間中提取信號(hào)的初始特征,相當(dāng)于對(duì)軸承信號(hào)首先實(shí)施一次降維處理,再利用LLE算法得到最終的降維結(jié)果[12],但該方法需要新舊樣本同時(shí)參與計(jì)算。文獻(xiàn)[13]中利用張量的標(biāo)準(zhǔn)分解得到原始張量的因子矩陣和權(quán)重,將其重構(gòu)回一維信號(hào)并提取信號(hào)特征。
設(shè)計(jì)了軸承振動(dòng)信號(hào)張量模型的故障診斷方法。首先利用小波變換和相空間重構(gòu)進(jìn)行張量建模,通過HOSVD[14]挖掘出信號(hào)的重要特征,經(jīng)過擬合增強(qiáng)不同故障類型曲線間的區(qū)分度,最后依據(jù)提出的區(qū)分度函數(shù)估計(jì)出各類數(shù)據(jù)間的最優(yōu)分類點(diǎn)。在此基礎(chǔ)上,基礎(chǔ)提出了軸承信號(hào)張量模型故障分類方法。
2 軸承信號(hào)的張量建模與分解
信號(hào)在不同的變換方法下獲得的結(jié)果是不同的,投影到不同的子空間時(shí)就可以獲得不同的描述特征。由這些子空間構(gòu)建的張量模型可以綜合考慮信號(hào)的各方面特征,這時(shí)的張量模型可以視為一個(gè)多維矩陣,實(shí)現(xiàn)對(duì)信號(hào)的多角度觀測(cè),提高后續(xù)軸承故障診斷的精度。
為獲取張量模型中軸承故障的特征信息,對(duì)張量模型進(jìn)行分解,選取分解結(jié)果中具有代表性的部分作為軸承信號(hào)的初始特征。常用的張量分解有CP分解和Tucker分解。CP分解是指將張量分解為R組N個(gè)秩一向量外積的形式。但其分解的結(jié)果不唯一,求取R的最小值是一個(gè)NP問題。Tucker分解是指把N階張量分解成一個(gè)N階核心張量和N個(gè)因子矩陣的n模式乘積的形式,如式(1)所示。張量的n模式展開,如圖1所示。其中因子矩陣反映了相應(yīng)階上的特征分布。

圖1 張量不同維度展開形式Fig.1 Flattening a Tensor along Different Dimensions
高階奇異值分解(High-Order Singular Value Decomposition,HOSVD)屬于Tucker分解的特殊形式,其中得到的伴隨矩陣是呈正交關(guān)系的。對(duì)軸承振動(dòng)信號(hào)按照時(shí)間、頻率、子空間三個(gè)不同維度建立三階張量模型,利用HOSVD進(jìn)行分解的具體過程為:將張量展開成一系列的矩陣,如圖1所示。再對(duì)這些矩陣進(jìn)行SVD分解,得到各維度上的對(duì)角奇異值矩陣、列空間展開項(xiàng)、行空間展開項(xiàng)。

式中:χ∈CΦ×Γ×Η—三階軸承信號(hào)張量模型;Φ—模型的頻率維度;Γ—模型的子空間維度;H—模型的時(shí)間維度。χ中的元素用x?,γ,η表示。由此,χ的等效模式展開矩陣為:
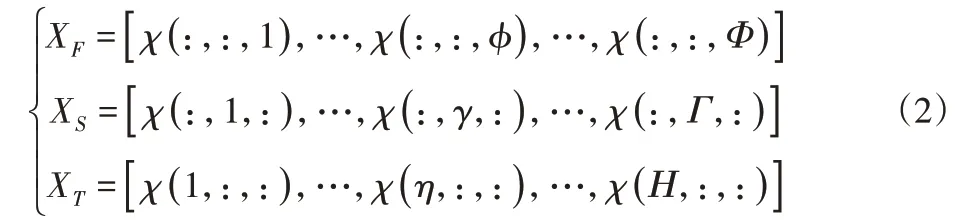
式中:XF、XS、XT矩陣—沿頻率維度、子空間維度和時(shí)間維度切割得到的矩陣按行展開的形式。
由矩陣的奇異值分解知,存在正交矩陣U∈?m×m和V∈?n×n,使得矩陣X∈?m×n有X=UΛVT。其中,Λ=∈?m×n為偽對(duì)角矩陣,Λ=diag(σ1,σ2,σ3,…,σG)的對(duì)角元素是X的奇異值,G為矩陣X的秩數(shù)。并且有:

則(2)式在分解后得到:

為了選擇盡可能少的元素來概括盡可能多的特征用于分析故障類別,在以上得到的分解結(jié)果中,選擇ΛF,ΛT,ΛS矩陣中的對(duì)角元素作為初始特征。
3 軸承故障診斷系統(tǒng)
軸承故障診斷系統(tǒng)由特征提取子系統(tǒng)、特征優(yōu)化子系統(tǒng)和故障診斷子系統(tǒng)三部分組成,虛線箭頭表示已知故障類型的軸承振動(dòng)信號(hào)的訓(xùn)練過程,實(shí)線箭頭表示新采集的軸承振動(dòng)信號(hào)的故障診斷流程,如圖2所示。在特征提取子系統(tǒng)中,通過對(duì)軸承振動(dòng)信號(hào)進(jìn)行小波變換和相空間重構(gòu),建立其三階張量模型,經(jīng)HOSVD獲得軸承信號(hào)的初始特征。在特征優(yōu)化子系統(tǒng)中,對(duì)軸承信號(hào)的初始特征進(jìn)行處理,得到初始特征曲線在最優(yōu)分類點(diǎn)處的特征值。根據(jù)區(qū)分度函數(shù),在已知故障類別的初始特征曲線上找到軸承故障的最優(yōu)分類點(diǎn),同時(shí)得到在最優(yōu)分類點(diǎn)處各類軸承狀態(tài)的特征值區(qū)間。將得到的特征值區(qū)間輸入故障診斷子系統(tǒng)中,等待新的軸承振動(dòng)信號(hào)經(jīng)過特征提取子系統(tǒng)和特征優(yōu)化子系統(tǒng)處理后得到其最優(yōu)分類點(diǎn)處的特征值,在故障診斷子系統(tǒng)中進(jìn)行比對(duì),得出軸承的故障類型。

圖2 軸承故障診斷系統(tǒng)結(jié)構(gòu)Fig.2 Structure of Bearing Fault Diagnosis System
3.1 特征提取子系統(tǒng)
文獻(xiàn)[12]利用小波變換和S變換對(duì)信號(hào)進(jìn)行處理,構(gòu)建軸承信號(hào)的張量模型。小波變換和S變換均為實(shí)現(xiàn)信號(hào)時(shí)頻變換的信號(hào)分解方法,但S變換的計(jì)算復(fù)雜度高、效率低,因此只保留其中對(duì)信號(hào)的小波變換。
信號(hào)x(t)在小波基下進(jìn)行展開,得到的連續(xù)小波變換為:

式中:ɑ—尺度參數(shù);τ—平移參數(shù)。為了解決計(jì)算量問題,ɑ,τ均選為2j(j∈N+)的倍數(shù),得到的離散小波變換為:

令軸承振動(dòng)時(shí)間序列共有w個(gè)采樣點(diǎn),表示為{Wj},其中,j=1…w,信號(hào)的小波變換結(jié)果表示為,分解層數(shù)為n。得到的小波變換空間為:

為了利用軸承振動(dòng)一維時(shí)間序列估計(jì)出原系統(tǒng)的動(dòng)態(tài)特性,引入信號(hào)的相空間重構(gòu)[15]。使用延遲重構(gòu)法,令軸承振動(dòng)時(shí)間序列共有w個(gè)采樣點(diǎn),表示為{Wj},其中j=1…w,相空間參數(shù)為嵌入維數(shù)m和時(shí)間延遲τ。得到重構(gòu)的軸承信號(hào)相空間為:

式中:i—相空間中的第i個(gè)相點(diǎn)。
利用軸承信號(hào)的小波變換與相空間重構(gòu)結(jié)果建立軸承信號(hào)的張量模型。通過小波變換獲取軸承信號(hào)在時(shí)頻上的特征。通過相空間重構(gòu)估計(jì)出與原系統(tǒng)相同的動(dòng)力學(xué)特征,避免實(shí)際工程中的多次采樣時(shí)軸承初始校準(zhǔn)位置不對(duì)齊的情況。

圖3 張量表示Fig.3 Tensor Representation
在初始特征提取時(shí),在HOSVD處理后的結(jié)果中,選用ΛS中的對(duì)角元素來代替龐大的張量模型,作為軸承振動(dòng)信號(hào)的初始特征IF(theinitial features)。

3.2 特征優(yōu)化子系統(tǒng)
為便于對(duì)初始特征進(jìn)行觀察和分析,尋找這些相似性作為故障診斷的依據(jù),在二維空間中繪制初始特征曲線(IF曲線)。由式(3)可知IF向量中的元素均為非負(fù)元素,且按照遞減的順序排列。
將在特征提取子系統(tǒng)中得到的IF向量集描述為:

式中:C—軸承狀態(tài)類別總數(shù);pn—第n個(gè)軸承振動(dòng)信號(hào)在特征提取子系統(tǒng)中得到的IF向量,每個(gè)IF向量含有(J+1)個(gè)元素。由于軸承信號(hào)在采集時(shí)伴有干擾,且軸承在工作中也存在持續(xù)地緩慢磨損,因此增加了IF曲線中無意義極值的分布。這些無意義極值點(diǎn)相比于其相鄰極值點(diǎn)變化速度過快或過慢,使得C簇IF曲線出現(xiàn)少數(shù)的交疊現(xiàn)象。這些曲線是非平滑的,不利于通過函數(shù)運(yùn)算進(jìn)行處理。在保留IF向量中元素非負(fù)遞減趨勢(shì)的情況下,對(duì)式(10)進(jìn)行拋物線擬合結(jié)果為:

擬合后的曲線簇Q去除了原IF曲線上具有干擾性質(zhì)的極值點(diǎn),同時(shí)保留了IF曲線的主體下降趨勢(shì)。把Q投影在二維空間中,自變量區(qū)間為(0,J),則區(qū)間內(nèi)一定存在一點(diǎn)j使得同類IF的Q(j)聚集度最高,非同類IF的Q(j)分散度最高。于是定義區(qū)分度函數(shù)L:

式中:L1—在j點(diǎn)處Q中所有IF曲線占用的總空間;L2—在j點(diǎn)處C簇曲線擬合結(jié)果分別占用的空間和。則最優(yōu)分類點(diǎn)j可通過計(jì)算如下目標(biāo)函數(shù)獲得:

式中:j=argminL(j)—初始特征的最優(yōu)分類點(diǎn)。
3.3 故障診斷子系統(tǒng)
在特征優(yōu)化子系統(tǒng)中,對(duì)已知故障類型的IF曲線進(jìn)行處理,通過區(qū)分度函數(shù)得到故障最優(yōu)分類點(diǎn),將其輸入故障診斷子系統(tǒng)中。當(dāng)機(jī)械設(shè)備采集到新的軸承振動(dòng)信號(hào)時(shí),在特征優(yōu)化子系統(tǒng)中計(jì)算新的IF曲線在最優(yōu)分類點(diǎn)處的特征值,將其與原有信號(hào)的故障分類信息比對(duì),得出當(dāng)前軸承的故障狀態(tài)。
4 實(shí)驗(yàn)
4.1 不同IF提取方法的對(duì)比
使用江蘇千鵬軸承實(shí)驗(yàn)平臺(tái)采集軸承正常狀態(tài)、外圈故障、滾珠故障和內(nèi)圈故障的軸承振動(dòng)信號(hào),軸承轉(zhuǎn)速1000r/min,采樣頻率5kHz,如圖4所示。每類狀態(tài)的軸承信號(hào)隨機(jī)選取80個(gè),同時(shí)建立兩種不同的張量模型,對(duì)比初始特征效果。第一組采用MLSLLE算法中的張量建模方式,模型的子空間由軸承信號(hào)的小波變換和S變換構(gòu)成。其中小波變換選用db3小波作為母小波,分解層數(shù)為7。S變換選取變換結(jié)果的前八層。第二組張量模型由特征提取子系統(tǒng)完成。

圖4 軸承測(cè)試平臺(tái)Fig.4 Bearing Test Platform
橫坐標(biāo)表示每個(gè)IF向量中的16個(gè)特征值(J=15),縱坐標(biāo)表示IF值,如圖5所示。圖5(a)、圖5(b)為第一組張量模型的IF曲線與其擬合結(jié)果。圖5(a)中在從第四個(gè)IF值開始,即橫坐標(biāo)3的位置處,正常狀態(tài)與內(nèi)圈故障狀態(tài)的IF值開始出現(xiàn)重疊,可用于區(qū)分類別的區(qū)間僅為(0,3)。經(jīng)擬合后的IF曲線變得平滑(圖5(b)),可區(qū)分空間擴(kuò)大到(0,5)。圖5(c)、圖5(d)為第二組張量模型的IF曲線與其擬合結(jié)果。圖5(c)中除僅有一條滾珠故障IF曲線在3處和內(nèi)圈故障曲線相近,其余各類IF值在(0,11)區(qū)間內(nèi)差距明顯。圖5(d)中各類IF曲線擬合后的可區(qū)分區(qū)間擴(kuò)大到(0,13),同時(shí)忽略了個(gè)別IF曲線中的無用極值點(diǎn),增大了各類IF曲線之間的可區(qū)分度。從上述實(shí)驗(yàn)可以看到,第二組張量模型中各類IF的區(qū)分度更高。同時(shí)在對(duì)IF曲線擬合后,可以增大不同類特征之間的差異,并能擴(kuò)大可選取分類區(qū)間的范圍。

圖5 不同算法的初始特征Fig.5 Initial Features Extracted by Different Algorithms
4.2 軸承故障診斷系統(tǒng)效果驗(yàn)證
選用美國(guó)凱斯西儲(chǔ)大學(xué)軸承故障診斷實(shí)驗(yàn)中心的軸承數(shù)據(jù)驗(yàn)證軸承故障診斷系統(tǒng)效果。數(shù)據(jù)集采集參數(shù)為:驅(qū)動(dòng)端軸承型號(hào)為SKF6205,軸承損傷直徑0.007英寸,采樣頻率為12kHz。400個(gè)軸承振動(dòng)信號(hào)隨機(jī)分成由320個(gè)信號(hào)構(gòu)成的訓(xùn)練樣本集和80個(gè)信號(hào)構(gòu)成的測(cè)試樣本集。訓(xùn)練樣本用于確定IF最優(yōu)分類點(diǎn)。測(cè)試樣本用于驗(yàn)證故障診斷系統(tǒng)的準(zhǔn)確性。
特征優(yōu)化子系統(tǒng)中輸出的訓(xùn)練樣本和測(cè)試樣本IF曲線,如圖6所示。

圖6 特征優(yōu)化子系統(tǒng)的IF曲線Fig.6 IF Curve of Feature Optimization Subsystem
在(6,12)區(qū)間計(jì)算訓(xùn)練樣本IF曲線的L值,如表1所示。在6處L值為0.3035,(6,8)區(qū)間L值逐漸下降,8處L值為0.2955,(8,12)區(qū)間內(nèi)L值呈現(xiàn)遞增趨勢(shì)。L在8處取得最小值,確定此處為各軸承狀態(tài)的最佳分類點(diǎn)并輸入到故障診斷子系統(tǒng)中。測(cè)試樣本集經(jīng)特征提取子系統(tǒng)和特征優(yōu)化子系統(tǒng)后,得到新的IF曲線,計(jì)算其在最優(yōu)分類點(diǎn)處的IF值(圖6(b))。在故障診斷子系統(tǒng)中,將其與訓(xùn)練樣本的輸入信息比較,實(shí)現(xiàn)故障類型的識(shí)別。各狀態(tài)的訓(xùn)練樣本和測(cè)試樣本IF在最優(yōu)分類點(diǎn)處的數(shù)值分布的范圍,如表2、表3所示。可以清晰地看出各個(gè)軸承狀態(tài)的IF值都有各自的分布區(qū)間且沒有任何交集,符合用于軸承故障的分類的條件,如圖7所示。測(cè)試樣本在最優(yōu)分類點(diǎn)處的IF值幾乎全部落在訓(xùn)練樣本的IF值分布區(qū)間中。個(gè)別在區(qū)間外的,也可以通過計(jì)算最相近IF,判斷出故障類別,各類軸承狀態(tài)的IF值分布區(qū)間差距大,不會(huì)對(duì)判斷故障類別造成影響,證明了軸承故障診斷系統(tǒng)的實(shí)用性和準(zhǔn)確性。
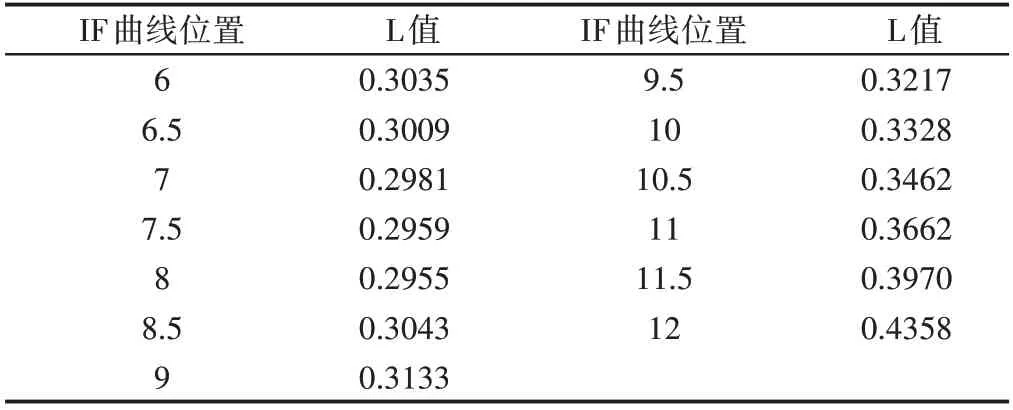
表1 IF曲線的區(qū)分度函數(shù)值Tab.1 Discrimination Function Value of IF Curve

表2 訓(xùn)練樣本IF值統(tǒng)計(jì)Tab.2 IF Numerical Values of Training Samples

表3 測(cè)試樣本IF值統(tǒng)計(jì)Tab.3 IF Numerical Values of Testing Samples

圖7 故障診斷子系統(tǒng)對(duì)比結(jié)果Fig.7 Comparison Results of Fault Diagnosis Subsystems
同時(shí),為提高軸承故障診斷的準(zhǔn)確性,將歷次實(shí)驗(yàn)中得到的已知故障類型的軸承初始特征并入訓(xùn)練樣本中,豐富系統(tǒng)中訓(xùn)練樣本的初始特征內(nèi)容。用盒圖統(tǒng)計(jì)了利用上述凱斯西儲(chǔ)軸承信號(hào)數(shù)據(jù)進(jìn)行的三次迭代實(shí)驗(yàn)結(jié)果,如圖8所示。其中的樣本集使用情況,如表4所示。樣本集1作為訓(xùn)練樣本,其余的作為迭代實(shí)驗(yàn)的測(cè)試樣本。

圖8 迭代實(shí)驗(yàn)結(jié)果Fig.8 Iterative Experimental Results

表4 迭代實(shí)驗(yàn)樣本集Tab.4 Sample Set of Iterative Experiments
依實(shí)驗(yàn)的迭代順序把最優(yōu)分類點(diǎn)處IF統(tǒng)計(jì)量按照正常狀態(tài)(1-4)、內(nèi)圈故障(5-8)、滾珠故障(9-13)和外圈故障(14-16)的順序進(jìn)行排列,其中序號(hào)1、5、9、14對(duì)應(yīng)的為四類狀態(tài)的訓(xùn)練樣本IF值統(tǒng)計(jì)量,其余為測(cè)試樣本IF值統(tǒng)計(jì)量,如圖8所示。可以看出各類軸承狀態(tài)的IF區(qū)分度很大,且各次實(shí)驗(yàn)的結(jié)果一直保持在穩(wěn)定的數(shù)值區(qū)間中,進(jìn)一步證明了軸承故障診斷系統(tǒng)符合工業(yè)實(shí)用的需要。
5 結(jié)論
這里提出了應(yīng)用于張量模型初始特征最優(yōu)分類點(diǎn)的區(qū)分度函數(shù),設(shè)計(jì)了一種利用HOSVD和區(qū)分度函數(shù)的軸承故障診斷系統(tǒng)。為驗(yàn)證軸承故障診斷系統(tǒng)的有效性,分別利用千鵬故障平臺(tái)和凱斯西儲(chǔ)大學(xué)的軸承數(shù)據(jù)進(jìn)行實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果表明,故障診斷系統(tǒng)能夠獲得比MLSLLE算法中更優(yōu)越的初始特征,且與最優(yōu)分類點(diǎn)區(qū)分度函數(shù)結(jié)合后能夠取得故障分類的高準(zhǔn)確率。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31
