信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維仿真
2022-01-22 02:45:42余孟陽
計算機仿真 2021年12期
余孟陽,楊 帆
(重慶師范大學(xué)涉外商貿(mào)學(xué)院,重慶 合川 401520)
1 引言
現(xiàn)代工業(yè)中的生產(chǎn)設(shè)備在科學(xué)技術(shù)的促進下,開始向自動化、連續(xù)化、高速化、系列化的方向發(fā)展[1]。生產(chǎn)設(shè)備的進步可以降低生產(chǎn)成本、保障產(chǎn)品質(zhì)量的同時提高經(jīng)濟效益和生產(chǎn)力,節(jié)約了大量的能源和人力,在現(xiàn)代工業(yè)中具有重要意義。但如動力機械設(shè)備等生產(chǎn)設(shè)備發(fā)生故障時,產(chǎn)生的維修費用較高、損失幅度較大[2]。鋼鐵、電力、化工等現(xiàn)代化大生產(chǎn)目前常使用連續(xù)性的生產(chǎn)操作方式,在現(xiàn)代化大規(guī)模生產(chǎn)過程中最基本且最常用的裝置為自動化設(shè)備,當(dāng)自動化設(shè)備在生產(chǎn)過程中出現(xiàn)故障時會導(dǎo)致停產(chǎn),造成巨大的經(jīng)濟損失[3]。在上述背景下自動化設(shè)備現(xiàn)場故障運維方法成為研究的熱點,當(dāng)前自動化設(shè)備現(xiàn)場故障運維方法存在檢測準確率低和檢測效率低的問題,需要對自動化設(shè)備現(xiàn)場故障運維方法進行研究[4]。
申鴻燁[5]提出基于監(jiān)測點的自動化設(shè)備現(xiàn)場故障運維方法,該方法建立故障監(jiān)測點,在故障傳播方向和層次的基礎(chǔ)上構(gòu)建故障樹,將自動化測試節(jié)點引入故障樹中,根據(jù)故障樹對獲取的自動測試信息和監(jiān)測點信息進行推理,實現(xiàn)自動化設(shè)備現(xiàn)場故障的檢測和維護,該方法得到的檢測結(jié)果誤差較大,存在檢測準確率低的問題。楊豐源等人[6]提出基于奇異譜熵分析的自動化設(shè)備現(xiàn)場故障運維方法,該方法在經(jīng)驗?zāi)B(tài)分解理論的基礎(chǔ)上獲得奇異譜熵分析的協(xié)方差矩陣,去除信號中存在的噪聲,提取熵特征向量,實現(xiàn)自動化設(shè)備故障的檢測與維護,該方法提取熵特征向量所用的時間較長,存在檢測效率低的問題。江麗、郭順生[7]提出基于特征映射的自動化設(shè)備現(xiàn)場故障運維方法,該方法通過LE算法提取原始高維設(shè)備振動信號中存在的低維流形特征,將提取到的特征輸入半監(jiān)督分類器中,對自動化設(shè)備的現(xiàn)場運行狀態(tài)進行識別,完成自動化設(shè)備現(xiàn)場故障的檢測和維護,該方法識別低維流形特征所用的時間較長,存在檢測效率低的問題。
綜上所述,提出信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法。
2 提取故障特征參數(shù)
針對自動化設(shè)備現(xiàn)場故障,不同特征參數(shù)在自動化設(shè)備現(xiàn)場故障檢測過程中的敏感性之間存在差異,為了準確地檢測自動化設(shè)備的現(xiàn)場故障,采集多個自動化設(shè)備的現(xiàn)場故障特征參數(shù),建立故障特征集,去除特征集中存在的不相關(guān)特征參數(shù)和冗余的特征參數(shù),利用剩余的故障特征參數(shù)實現(xiàn)自動化設(shè)備現(xiàn)場故障的檢測[8]。信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法通過以下4種設(shè)備故障特征參數(shù)建立故障特征集
(1)
(2)
(3)

(4)

設(shè){qm,t,p,m=1,2,…,Mt;t=1,2,…,T;p=1,2,…,P}代表的是自動化設(shè)備故障特征集,其中,qm,t,p描述的是利用采集的第m個樣本在第t種設(shè)備狀態(tài)下獲得的第p種特征參數(shù)值;Mt描述的是第t種設(shè)備狀態(tài)對應(yīng)的樣本數(shù)量;T描述的是設(shè)備狀態(tài)的總數(shù);P描述的是特征參數(shù)對應(yīng)的總量。
設(shè)dt,p代表的是不同樣本間存在的特征參數(shù)在不同設(shè)備狀態(tài)下的距離平均值,其計算公式如下

(5)

(6)

(7)
設(shè)ut,p代表的是所有樣本在不同設(shè)備狀態(tài)下的特征參數(shù)對應(yīng)的平均值,其計算公式如下
(8)


(9)

(10)
設(shè)λp代表的是補償因子,其計算公式如下
(11)
設(shè)αp代表的是距離評估指數(shù),其計算公式如下
(12)
設(shè)β代表的是綜合距離評估指數(shù),其計算公式如下
(13)
通過上述分析,信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法在CL3自適應(yīng)多小波庫中采用遺傳算法選擇最優(yōu)的多小波,利用選取的多小波提取設(shè)備的故障特征,具體步驟如下:
1)信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法對算法的進化次數(shù)進行初始化處理i=0,確定多小波分解系數(shù)和多小波分解層數(shù)的優(yōu)化分支,獲取二進制種群。
2)在二進制種群的基礎(chǔ)上獲取參數(shù)a、b、c、d、f的值,并將其帶入下述公式中獲得TST矩陣M1(ω)和M2(ω)

(14)

(15)
信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法采用自適應(yīng)小波構(gòu)造方法得到雙正交多小波。通過多小波分解經(jīng)過預(yù)處理后的信號,計算優(yōu)化分支在多小波分解系數(shù)中對應(yīng)的各個特征參數(shù)的綜合距離評估指數(shù)和距離評估指數(shù),在綜合距離評估指數(shù)的基礎(chǔ)上對染色體對應(yīng)的適應(yīng)度進行計算[10]。
3)通過選擇種群、交叉操作和變異操作獲得新種群。
4)設(shè)定最大進化次數(shù),當(dāng)進化次數(shù)i與信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法設(shè)定的最大進化次數(shù)相等時,最優(yōu)多小波即為進化所得的多小波,保存優(yōu)化分支在該小波分解系數(shù)中的綜合距離評估指數(shù)與距離評估指數(shù)以及多小波的濾波器系數(shù);如果當(dāng)進化次數(shù)i與信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法設(shè)定的最大進化次數(shù)不相等,回到步驟(2)中。
5)在故障特征集中根據(jù)上述步驟獲得結(jié)果選擇兩個存在巨大距離評估指數(shù)對應(yīng)的特征參數(shù),將其作為最終的自動化設(shè)備故障特征參數(shù)。
3 檢測自動化設(shè)備現(xiàn)場故障
信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法通過支持向量描述方法根據(jù)獲取的故障特征參數(shù)實現(xiàn)自動化設(shè)備現(xiàn)場故障的檢測。
將松弛變量ξi≥0引入每個樣本xi中,用求解目標(biāo)類訓(xùn)練樣本的超球體問題代替優(yōu)化問題
(16)
式中,C代表的是懲罰因子;R描述的是超球體的半徑;a描述的是超球體的中心點。
上述約束的優(yōu)化問題可以通過Lagrange乘子法轉(zhuǎn)變?yōu)闊o約束問題

(17)
式中,αi≥0、γi≥0均代表的是Lagrange乘子。求偏導(dǎo)后可用對偶問題代替原問題
(18)
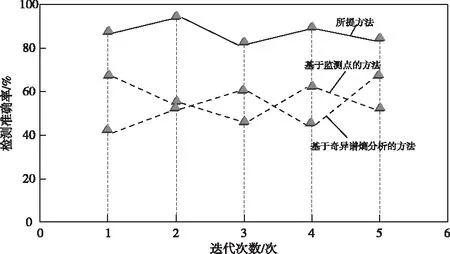
根據(jù)KKT條件可知,當(dāng)超球內(nèi)存在樣本時,αi的值為0;當(dāng)超球面中存在樣本時,0<αi 上式中存在的〈xi,xj〉用核函數(shù)K(xi,xj)=〈φ(xi),φ(xj)〉代替,將對偶問題變形為 (19) 根據(jù)上述分析,獲得決策函數(shù)的表達式 f(z;a,R)=sign(||φ(z)-φ(a)||2-R2) (20) 式中,z描述的是待檢測樣本點對應(yīng)的坐標(biāo),即決策變量。 當(dāng)f(·)的輸出值為0時,此時為目標(biāo)類,當(dāng)f(·)的輸出值不為0時,表明為故障點,信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法通過下式實現(xiàn)自動化設(shè)備現(xiàn)場故障的檢測 (21) 為了驗證信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法的整體有效性,在Visual C++開發(fā)的TTE平臺中對信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法進行測試,本次測試的操作系統(tǒng)為Windows。 分別采用信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法(所提方法)、基于監(jiān)測點的自動化設(shè)備現(xiàn)場故障運維方法(文獻[5]方法)和基于奇異譜熵分析的自動化設(shè)備現(xiàn)場故障運維方法(文獻[6]方法)進行測試,對比三種不同方法檢測自動化設(shè)備現(xiàn)場故障的準確率,測試結(jié)果如圖1所示。 圖1 三種不同方法的檢測準確率 分析圖1可知,采用所提方法對自動化設(shè)備現(xiàn)場故障進行檢測時,在多次迭代中的檢測準確率均高于80%,在第2次迭代中獲得的檢測準確率高達90%;采用基于監(jiān)測點的方法對自動化設(shè)備現(xiàn)場故障進行檢測時,在第3次迭代中基于監(jiān)測點的自動化設(shè)備現(xiàn)場故障運維方法獲得的檢測準確率低至50%;采用基于奇異譜熵分析的方法對自動化設(shè)備現(xiàn)場故障進行檢測時,在第1次迭代中基于奇異譜熵分析的自動化設(shè)備現(xiàn)場故障運維方法的檢測準確率低至40%。對比上述三種方法的測試結(jié)果可知,所提方法的檢測準確率較高,因為該方法通過多個設(shè)備故障特征參數(shù)建立自動化設(shè)備現(xiàn)場故障特征集,去除特征集中存在的不相關(guān)和冗余的特征參數(shù),通過高精度的特征參數(shù)進行自動化設(shè)備現(xiàn)場故障檢測,提高了信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法的檢測準確率。 將檢測效率作為測試指標(biāo),通過檢測效率對信息連接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法(方法1)、基于監(jiān)測點的自動化設(shè)備現(xiàn)場故障運維方法(方法2)和基于奇異譜熵分析的自動化設(shè)備現(xiàn)場故障運維方法(方法3)的有效性進行驗證,三種不同方法檢測自動化設(shè)備現(xiàn)場故障所用的時間如圖2所示。 圖2 三種不同方法的檢測時間 由圖2可知,采用所提方法對自動化設(shè)備故障進行檢測時,多次迭代中所用的檢測時間均在4s以下;采用基于監(jiān)測點的方法對自動化設(shè)備故障進行檢測時,多次迭代中所用的檢測時間在6s上下波動;采用基于奇異譜熵分析的方法對自動化設(shè)備故障進行檢測時,多次迭代中所用的檢測時間也在6s附近波動。對比上述三種方法的測試結(jié)果可知,所提方法所用的檢測時間較短,因為該方法采用遺傳算法選擇最優(yōu)多小波,通過多小波提取設(shè)備的故障特征,縮短了提取故障特征所用的時間,進而提高了所提方法的檢測效率。 為進一步驗證所提方法的運維效率,以現(xiàn)場故障信號誤差值為指標(biāo),進行仿真的結(jié)果如圖3所示。 圖3 不同方法獲取的故障信號誤差曲線 分析圖3可知,基于監(jiān)測點的方法獲取的故障信號誤差曲線波動較大,誤差范圍在0.59至-0.23。基于奇異譜熵分析的方法獲取的故障信號誤差曲線波動同樣較大,誤差范圍在0.57至-0.28。相較于其它兩個方法,所提方法獲取的故障信號誤差曲線波動較平穩(wěn),誤差范圍僅為0.34至0.08。實驗結(jié)果表明,使用所提方法進行現(xiàn)場故障檢測時獲取的信號誤差較小,運維效果更理想,具有較高的實際應(yīng)用性。 識別設(shè)備運行狀態(tài)信息是自動化設(shè)備狀態(tài)監(jiān)測的實質(zhì),在設(shè)備現(xiàn)場故障運維過程中上述狀態(tài)信息的質(zhì)量至關(guān)重要,特別是自動化設(shè)備向智能化、大型、精密、高速的發(fā)展過程中,設(shè)備的工作強度不斷加大,結(jié)構(gòu)越來越復(fù)雜,使自動化設(shè)備現(xiàn)場故障運維成為重要工作內(nèi)容。當(dāng)前自動化設(shè)備現(xiàn)場故障運維方法存在檢測準確率低和檢測效率低的問題,提出信息鏈接技術(shù)下自動化設(shè)備現(xiàn)場故障運維方法,可在短時間內(nèi)提取自動化設(shè)備故障的特征參數(shù),通過特征參數(shù)準確地實現(xiàn)自動化設(shè)備故障的檢測,為自動化設(shè)備的應(yīng)用和發(fā)展奠定了基礎(chǔ)。由于時間有限,所提方法仍然存在可提升的空間,尤其在自動化設(shè)備現(xiàn)場故障運維能耗方面,這也是未來的研究方法,為工業(yè)自動化設(shè)備的廣泛應(yīng)用奠定扎實的理論基礎(chǔ)。
4 實驗結(jié)果與分析
5 結(jié)束語
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
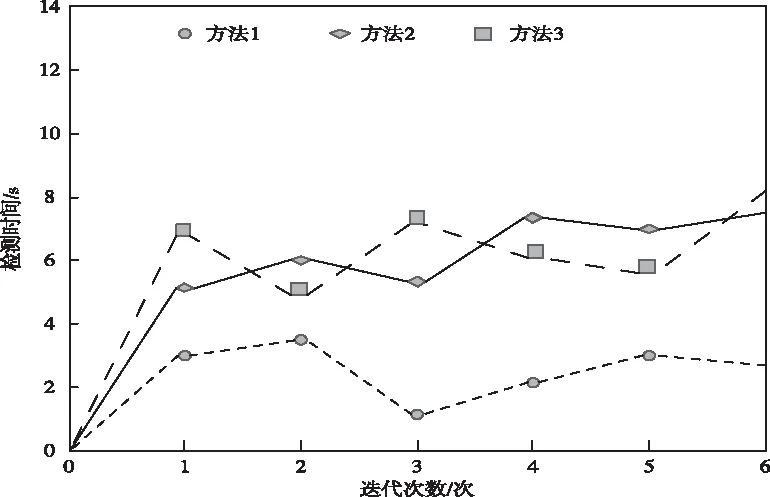
電子制作(2018年11期)2018-08-04 03:26:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
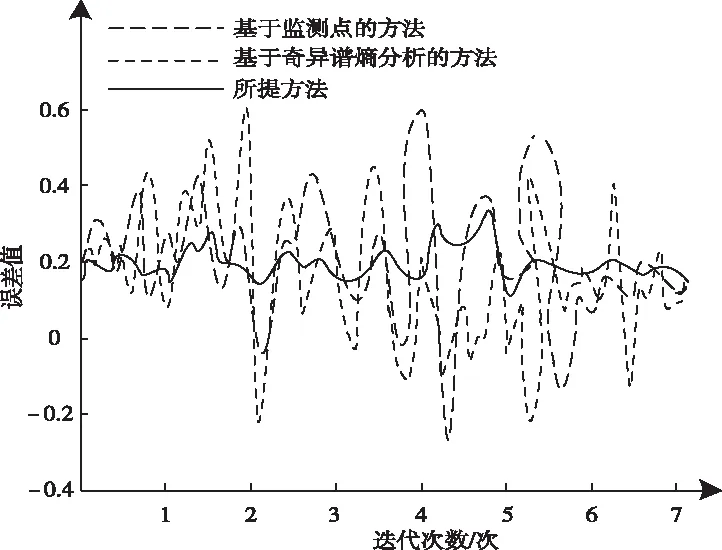
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50