基于Simulink的航天器姿態動力學仿真教學研究
2022-01-22 02:46:06王衛杰張雅聲
計算機仿真 2021年12期
王衛杰,張雅聲,姚 紅,任 元
(航天工程大學,北京 101416)
1 引言
航天工程大學是我軍培養航天指揮管理與工程技術人才的搖籃。航天器姿態動力學是我校航天測發測控本科專業和航空宇航科學與技術學科研究生學員必修的專業課,是體現我校航天特色的主干課程。航天器姿態動力學主要研究剛體航天器繞其質心的轉動規律,即航天器姿態在外力矩作用下的動力學和運動學特征。課程內容涵蓋知識范圍廣、數學公式推導多、系統性邏輯性強,傳統灌輸式教學方法使得課堂教學較為枯燥、教學效果不夠理想。如何在課程教學中,使學生在學習航天器姿態動力學基本內容的同時,能更深刻地領會和掌握所學知識的內在聯系和應用效果,是課程教學過程中面臨的難題。
仿真教學具有理論教學和物理實驗的雙重功能,有利于引導學員探究式學習,是當前教學改革的重要方向[1-4]。Simulink是Matlab中的一種可視化圖形化模塊化軟件工具,集成動態系統建模、綜合設計分析和虛擬現實仿真環境,廣泛應用于線性非線性系統、控制理論及數字信號處理等教學科研領域。文獻[5,6]結合通信原理課程內容實例,研究了Simulink通信系統仿真教學改革。文獻[7]分析了Simulink在電力電子技術教學過程中動態比較、疑難解答、系統認知和實驗拓展等方面的應用問題。文獻[8,9]利用Simulink建立了電路系統虛擬實驗平臺。文獻[10-12]分別探討了Simulink在非線性系統、自動控制原理和理論力學教學中的應用模式。上述文獻結合各自課程內容特點,驗證了運用Simulink開展仿真教學的可行性和有效性。在航天器動力學相關的教學科研方面,文獻[13]結合Simulink和VRML(Virtual Reality Modeling Language)語言設計了航天器軌道運動原理虛擬實驗系統。文獻[14-16]針對各自科研項目需求,從不同的側重點搭建了Simulink航天器姿態控制仿真系統,但因專業性較強,難以適用于航天器姿態動力學的課程教學。
基于上述分析,結合航天器姿態動力學課程內容特點和教學需求,開展圖形化可視化Simulink仿真教學研究。梳理課程內容體系,分析典型姿控系統自閉環回路特征,提出基于航天器姿控仿真教學系統的理論輔助教學和實驗實踐教學的教改思路。設計航天器姿控仿真教學系統總體方案,依據航天器姿態歐拉動力學和四元數運動學方程構建Simulink姿態運動模型,建立速率陀螺和反作用飛輪等典型姿控硬件模型,運用虛擬現實三維建模語言和Simulink/3D Animation工具闡明可視化姿態模擬的實現思路。搭建了反作用飛輪姿控Simulink仿真教學系統實例,通過姿態非線性微分方程數值解實時驅動下的動態立體姿控視覺效果,使學員以閉環交互方式獲得課程內容學習的多重感知。
2 航天器姿態動力學課程分析
本課程以剛體動力學和控制工程知識為依據,緊緊圍繞航天器姿態動力學、運動學和姿態控制軟硬件等內容展開教學任務,是航天器飛行控制與在軌管理方向學員未來勝任崗位業務需求必須掌握的基本技能。
2.1 內容體系
航天器姿態動力學課程內容包括姿態運動理論和姿態控制大部分,如圖2所示。其中,姿態運動是以動量矩定律為基礎研究航天器在合外力矩作用下繞其質心運動的狀態和性質,主要包括為航天器姿態歐拉動力學方程和四元數運動學方程。合外力矩是指控制力矩和空間擾動力矩的矢量和。空間擾動力矩來源于氣動、重力梯度、太陽輻射和地磁等環境力矩,擾動力矩會引起航天器姿態發生變化。有些情況也可將擾動力矩作為姿態穩定力矩。
航天器姿態控制是在控制力矩作用下實現航天器姿態定向,包括姿態穩定和姿態機動兩方面。前者是保持已有姿態,后者是從一個姿態到另一個姿態的轉變。實現航天器姿態控制依賴于由姿態敏感器、控制執行機構和星載計算機等軟硬件組成的姿控系統。其中,姿態敏感器主要包括星敏感器、太陽敏感器和速率陀螺等。姿態執行機構主要包括飛輪系統(細分為反作用飛輪、控制力矩陀螺、偏置動量矩輪等類型)、推力器和重力桿等裝置。
2.2 課程特點
在課程內容的兩大模塊中,以歐拉動力學和四元數運動學為核心的姿態運動理論,其數學表現形式為多元非線性微分方程,描述對象為慣性系、星體系和軌道系等多種三維空間坐標系下的航天器時變姿態參數,具有很強的理論性。姿態控制部分則緊密結合工程應用,需要講授諸多姿態控制軟硬件。如何將上述抽象的理論知識和實際硬件算法有效結合,提高授課質量,是主講教員必須思考的問題。
考慮到航天器姿控系統設計涉及課堂教學的全部內容,是對學員課程學習效果和實踐能力的綜合檢驗。筆者以此為突破口,探索課程仿真教學改革模式。
課程講授的航天器姿控系統主要類型如表1所示,顯然,各類姿控系統的區別在于航天器產生控制力矩的方法不同。被動式姿控系統因指向精度低且無姿態機動能力,主要用于早期航天器。主動式姿控系統的控制力矩來自于航天器上的能源。其中,推力器姿控系統因需消耗工質,影響航天器壽命且姿態控制精度有限,目前主要用于航天器軌道控制。現用航天器姿控系統主要為基于角動量交換的飛輪三軸姿態控制技術。
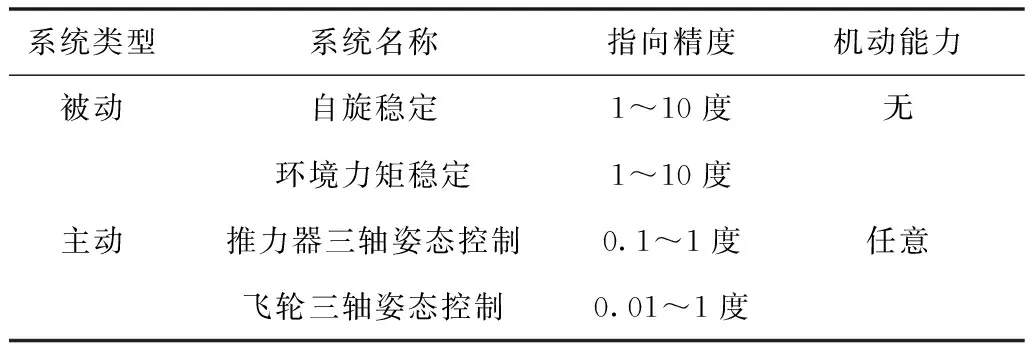
表1 航天器姿控系統類型
飛輪三軸姿控系統的顯著特征是將課程主要內容串聯成一個閉環回路,如圖2所示,圖中姿態控制器的功能是由星載計算機實現控制規律或控制對策,把姿態敏感器和執行機構聯接起來,從而完成對航天器姿態的控制任務。姿態信息(姿態角和角速度)和力矩指令則成為連通姿控系統各組件的“血液”。
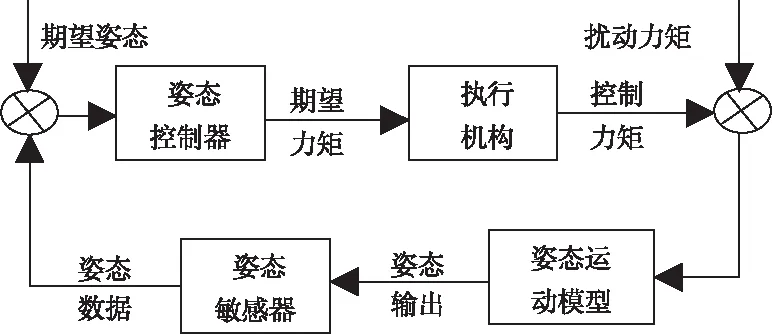
圖2 航天器姿控系統回路
綜上所述,為著眼提高學員綜合素養,增強課程理論教學的直觀性,突出航天器姿態控制的邏輯關系和控制效果,通過充分調研相關課程教學改革的有益實踐,結合課程內容體系自閉環回路的特點,提出基于Simulink虛擬現實的姿態控制仿真系統教學方法,用于課堂理論輔助教學和課程實驗實踐教學。
3 Simulink仿真教學系統設計
Simulink作為一種建模與仿真軟件工具,視覺上表現為方框圖,數學上表征為微分或差分方程并用數值法加以求解,行為上模擬了物理硬件和算法軟件功能。基于Simulink的仿真教學系統設計就是要構建集圖形化數學模型、參數化姿態信息曲線、可視化姿態動態模擬等功能于一體的仿真教學系統,全方位展現航天器姿態運動學和動力學方程、姿態控制系統軟硬件、姿態控制信息流、航天器姿態變化規律等課程教學重難點,夯實學員專業基礎,啟迪學員創新思維。仿真教學系統總統設計方案如圖3所示,圖中只列出了常用姿態控制執行機構和姿態敏感器。
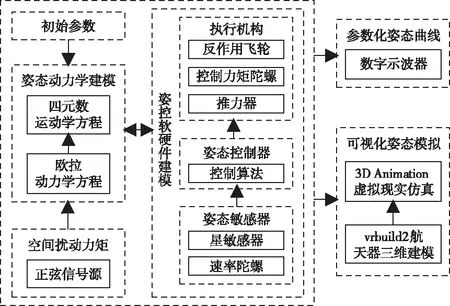
圖3 航天器姿控仿真教學系統總體方案
為與教學內容匹配,仿真教學系統的執行機構和敏感器有多種模型庫,下文以反作用飛輪和速率陀螺為例給出系統建模方法。
3.1 姿態運動建模
姿態運動理論是課程理論性最強的部分,姿態運動建模也是實現仿真教學系統的基礎。Simulink/Aerospace模塊提供了坐標系變換函數、歐拉角和四元數等數學模型,可用于仿真分析航天器飛行動力學和運動學。
剛體航天器姿態歐拉動力學方程為

(1)
式中,J為航天器轉動慣量,ω為星體坐標系相對于慣性坐標系的角速度在在星體坐標系下的分量,ω×為斜對稱矩陣,Tc為控制力矩,Td為擾動力矩,二者構成合外力矩T。
式(1)是一組非線性微分方程式,難以獲得解析解,利用Simulink數值法求解即能加深學員對問題的理解,還可增強學員實踐能力。依據該式構建航天器Simulink動力學模型,如圖4所示,輸入為合外力矩T,輸出為角速度ω。
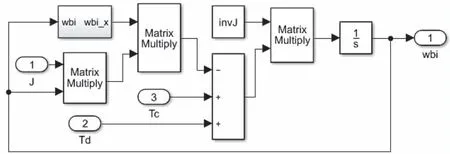
圖4 姿態動力學模型
航天器四元數姿態運動學方程為

(2)


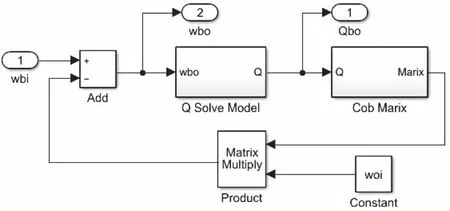
圖5 四元數運動學模型
3.2 姿控硬件建模
速率陀螺敏感到的姿態信息含有陀螺噪聲,該噪聲分為白噪聲和常值漂移兩部分。考慮陀螺噪聲的速率陀螺模型如圖6所示,其中,White Noise模塊用于生成隨機白噪聲Constant Drifting模塊用于提供常值漂移,編碼器Quantizer模塊是為了體現陀螺精度。
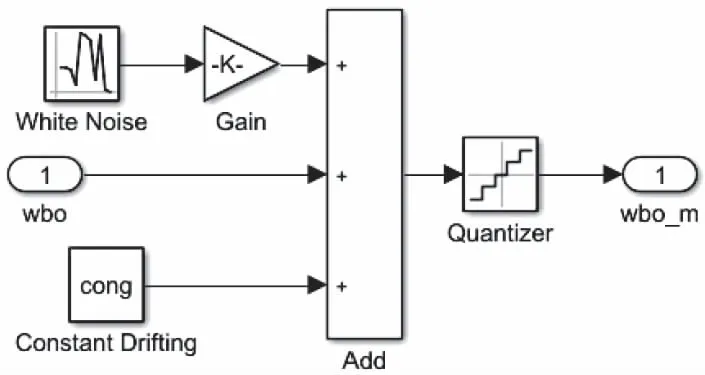
圖6 角速率陀螺模型
反作用飛輪通過飛輪轉速的改變輸出控制器給予的期望力矩,飛輪固連在航天器上,由于陀螺進動效應,當星體以角速度ω轉動時,還會產生陀螺力矩ω×hw,hw為飛輪動量矩,故反作用飛輪模型如圖7所示,輸入為控制信號Tu和角速度ω,輸出為控制力矩Tc。
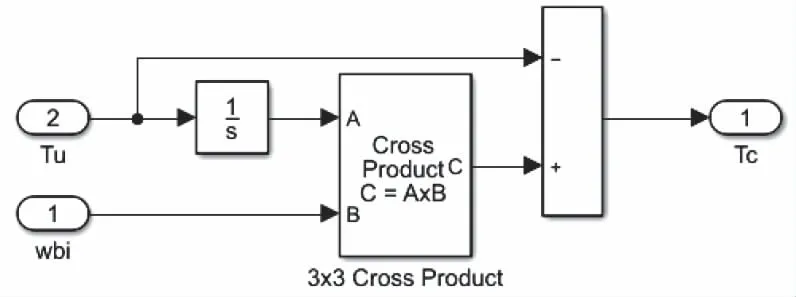
圖7 反作用飛輪模型
3.2 可視化姿態模擬
為了將航天器姿態變化規律和控制效果動態立體的展示給學員,利用Matlab/Simulink虛擬現實技術構建航天器姿態三維可視化仿真模型。
在Matlab2017b中虛擬現實工具箱包括V-Realm Builder2三維建模工具和Simulink/3D Animation動畫演示工具。3D Animation還集成有3D Player和3D World Editor兩個子工具,前者用于播放3D Animation錄制的動畫,后者用于查看三維模型。
利用V-Realm Builder2實現三維航天器建模,其底層為虛擬現實建模語言(VRML)。Matlab提供了大量的三維模型庫,為了提高效率,在現有模型基礎上建立三維航天器模型,如圖8所示,圖中左側樹形列表中的center、rotation、scale、translation等參數,就是Simulink操控模型的數據接口。
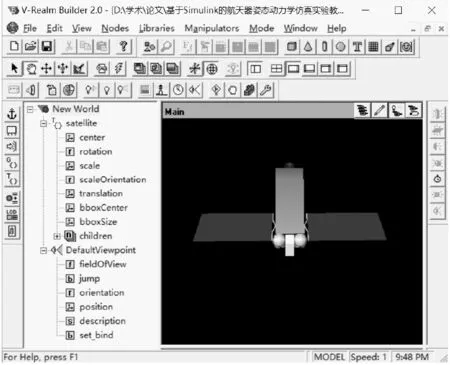
圖8 三維航天器建模
航天器三維模型建好后,利用Simulink/3D Animation工具中的VR Sink模塊將其集成進入仿真系統,因姿態運動是航天器繞其質心的轉動,故選中參數rotation,如圖9所示。
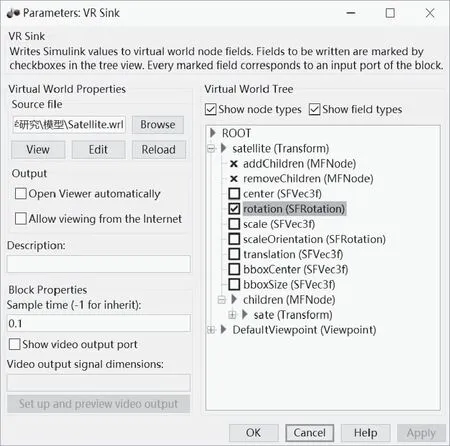
圖9 VR Sink模型設置
以上就是Simulink姿控仿真教學系統的方案設計和建模流程。
4 教學應用實例
基于上述建模成果,針對反作用飛輪三軸姿態控制教學內容,搭建Simulink航天器姿態控制仿真教學系統,如圖10所示,圖中Dynamics和Kinematics為姿態歐拉動力學和四元數運動學模型,Gyro Sensor為速率陀螺、Flywheel為反作用飛輪,PD Controller為PD姿態控制器,Disturbance為擾動力矩,4個示波器Scope分別用于顯示歐拉角、角速度、控制力矩和擾動力矩變化曲線,VR Sink為姿態可視化模擬模塊。包括轉動慣量J在內的初始參數通過m文件賦值。
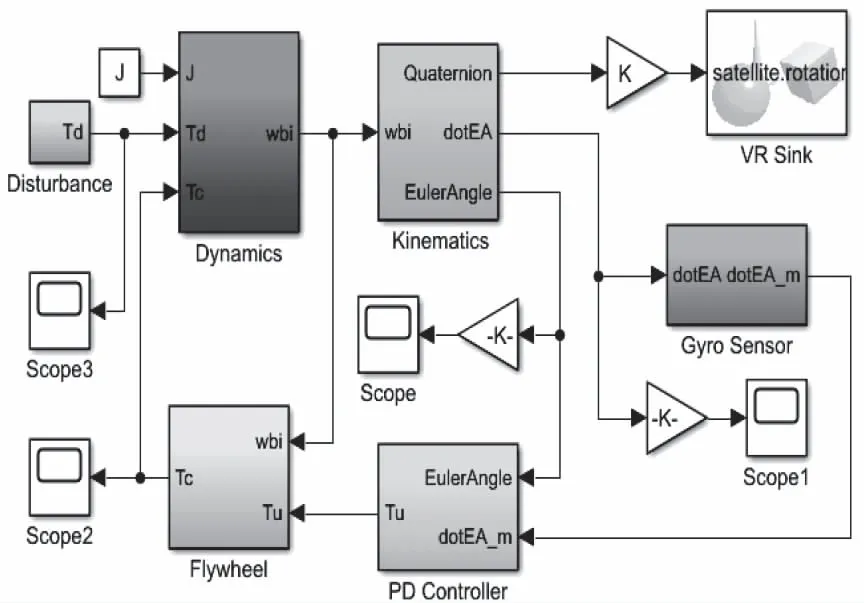
圖10 Simulink姿控仿真教學系統
雙擊VR sink模塊,打開3DAnimation虛擬現實動畫演示窗口,如圖11所示,點擊圖中三角形按鈕啟動整個仿真系統,航天器姿態則隨仿真進程中姿態角的變化實時改變,實現可視化姿態機動模擬。
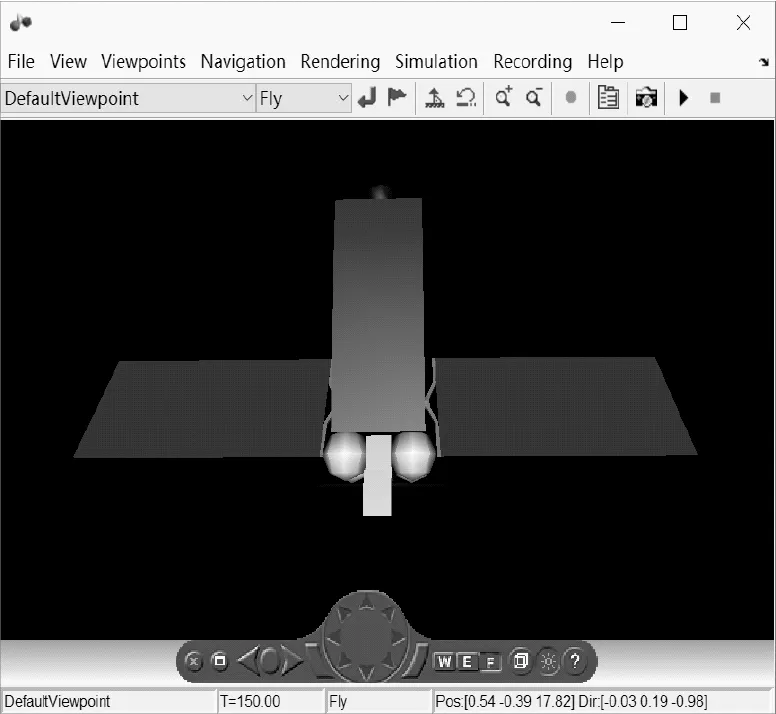
圖11 可視化姿態機動模擬
雙擊打開Scope則可查看與圖11對應的航天器姿態動態變化曲線,圖12為歐拉角速度變化收斂曲線,亦可通過圖中的三角形按鈕啟動仿真系統運行。

圖12 歐拉角速度曲線
在課堂教學中,引入仿真教學系統,針對姿態運動理論內容,結合實驗系統輔助教學,著重講解數學推導過程和建模方法步驟,剖析非線性微分方程的數值求解方法,使學員明晰航天器姿態運動原理。針對姿控軟硬件,運用實驗實踐教學法,學員可在現有實驗系統的基礎上,更換執行機構及其構型,調整初始參數,通過動態立體的視覺效果顯示,理清姿控系統各組件模塊間的邏輯關系。仿真教學系統的應用可使學員以閉環交互的方式獲得課程內容學習的多重感知。
5 結論
針對航天器姿態動力學課程特點和教學需求,開展圖形化可視化Simulink仿真教學研究。梳理了課程內容體系,分析了典型姿控系統的閉環回路特征,提出了基于航天器姿控仿真教學系統的理論輔助教學和實驗實踐教學的教改思路。設計了航天器Simulink姿控仿真教學系統總體方案,建立了姿態歐拉動力學、四元數運動學以及速率陀螺和反作用飛輪等典型姿控硬件的Simulink模型,運用虛擬現實三維建模語言和Simulink動畫演示工具闡明了可視化姿態模擬的實現思路。搭建了反作用飛輪姿控Simulink仿真教學系統實例,該系統能夠直觀展示姿態運動非線性微分方程的數值求解方法以及解算數據實時驅動下的動態立體姿控視覺效果,使學員以閉環交互方式獲得課程內容學習的多重感知,收到了良好教學效果。
猜你喜歡
小學教學研究(2022年21期)2022-07-28 02:50:58
河北畫報(2021年2期)2021-05-25 02:06:16
甘肅教育(2020年14期)2020-09-11 07:57:50
甘肅教育(2020年12期)2020-04-13 06:25:34
東方教育(2017年19期)2017-12-05 15:14:48
唐山文學(2016年2期)2017-01-15 14:03:59
體育世界(學術版)(2015年9期)2015-07-01 15:57:55
語文知識(2015年9期)2015-02-28 22:01:41
風能(2015年4期)2015-02-27 10:14:38
體育師友(2013年6期)2013-03-11 18:52:18