弱通訊條件下水下航行器編隊(duì)行為分析
2022-01-10 14:08:44蘇浩秦郭明禹張子俊盧曼曼
兵器裝備工程學(xué)報 2021年12期
呂 達(dá),蘇浩秦,2,郭明禹,張子俊,盧曼曼
(1.中國航天空氣動力技術(shù)研究院, 北京 100074; 2.彩虹無人機(jī)科技有限公司, 北京 100074)
1 引言
多水下航行器編隊(duì)控制是近年來熱門的研究方向。編隊(duì)控制的思想來源于人類對于自然界的觀察,自然界中的鳥類、魚類等群體普遍存在編隊(duì)行為,這種編隊(duì)行為能使動物群體更有效地抵御入侵或捕獲獵物。同樣,利用多個水下航行器在空間中的編隊(duì),可以提高水下航行器系統(tǒng)的工作效率,擴(kuò)大其工作范圍;并且利用水下航行器編隊(duì)內(nèi)資源的冗余性,可以增強(qiáng)水下航行器系統(tǒng)的容錯性、魯棒性和靈活性。目前主流的水下航行器編隊(duì)控制策略主要有傳統(tǒng)主從編隊(duì)控制策略[1-3]基于人工勢場編隊(duì)控制策略[4-6]、虛擬剛體結(jié)構(gòu)編隊(duì)控制策略[7-8]、基于行為編隊(duì)控制策略[9-10]、分布式編隊(duì)控制策略[11-12]等等。
對于傳統(tǒng)主從式編隊(duì)控制,即在水下航行器編隊(duì)中指定一個航行器作為領(lǐng)航者,其余航行器作為跟隨者,跟隨者獲取領(lǐng)航者的運(yùn)動狀態(tài)并以此作為參考,根據(jù)自身在編隊(duì)中與領(lǐng)航者的相對位置,以一定的空間距離跟隨領(lǐng)航者航行。
假設(shè)在編隊(duì)中有m個水下航行器,假定第i個水下航行器為AUVi(i=1,2,…,m)。不妨令A(yù)UV1為領(lǐng)航者,AUV1通過水聲通訊機(jī)向其余水下航行器廣播其位置信息,AUVi(i=2,…,m)的任務(wù)計(jì)算機(jī)通過AUV1坐標(biāo)為參考,計(jì)算出AUVi的期望位置的表達(dá)式為:
(1)
式(1)中:GPS_x(i),GPS_y(i),GPS_z(i)分別為AUVi的3個坐標(biāo);l_x(1,i),l_y(1,i),l_z(1,i)分別為AUVi相對于AUV1的3個坐標(biāo)差。
對于有3個水下航行器的編隊(duì),其通訊結(jié)構(gòu)如圖1所示。
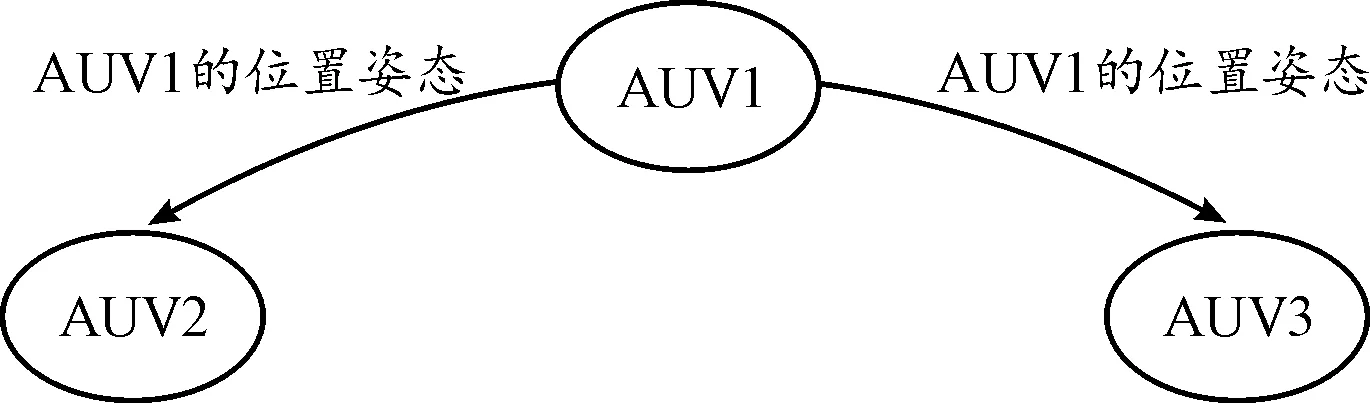
圖1 傳統(tǒng)主從式編隊(duì)策略通訊結(jié)構(gòu)示意圖Fig.1 communication structure of traditional master-slave formation strategy
傳統(tǒng)主從式編隊(duì)控制策略結(jié)構(gòu)簡單,易于實(shí)現(xiàn),是目前科學(xué)研究以及工程實(shí)現(xiàn)比較常用的方法。但是該方法對于各水下航行器的通訊要求比較高,從航行器存在由于距離或盲區(qū)等原因收不到主航行器水聲信號的問題,且主航行器通訊消耗的能量較大,容易造成能源消耗不均,主航行器在極端情況下一旦發(fā)生故障,航行器編隊(duì)很難繼續(xù)進(jìn)行作業(yè)。因此,可靠性較高的非主從式編隊(duì)策略具備很高的研究價值與應(yīng)用需求。
2 弱通訊非主從編隊(duì)控制策略介紹
2.1 編隊(duì)策略
本文提出一種弱通訊條件下的非主從編隊(duì)控制策略,具體為:假設(shè)在編隊(duì)中有m個水下航行器,假定第i個水下航行器為AUVi(i=1,2,…,m)。各個航行器在定速航行時按照預(yù)先設(shè)計(jì)的軌跡航行,不是時刻進(jìn)行通訊,只在固定的時間間隔進(jìn)行通訊以校正各航行器在隊(duì)形中的位置,且當(dāng)航行器編隊(duì)需要進(jìn)行一定編隊(duì)動作時,開始進(jìn)行通訊,隨機(jī)指定一個臨時“機(jī)動發(fā)起者”,不妨設(shè)為AUV1,AUV1將自身位置和姿態(tài)信息發(fā)送給AUV2作為參考,AUV2根據(jù)此信息解算出自身期望的位置;AUV2再將自身的位置和姿態(tài)信息發(fā)送給AUV3,AUV3再發(fā)送給AUV4,依次類推,AUVm-1發(fā)送給AUVm,形成一個鏈型的通訊拓?fù)浣Y(jié)構(gòu),如圖2所示。
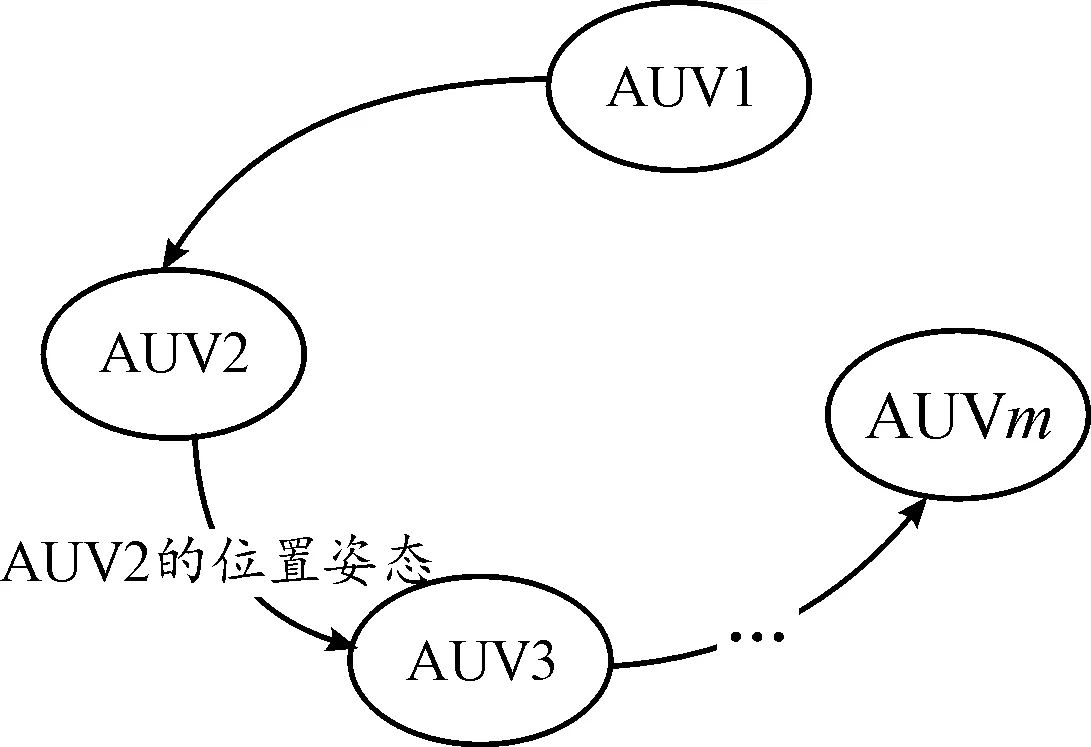
圖2 弱通訊非主從編隊(duì)策略通訊拓?fù)浣Y(jié)構(gòu)示意圖Fig.2 Communication structure of weak communication non master-slave formation strategy
第i個水下航行器位置的期望表達(dá)式為:
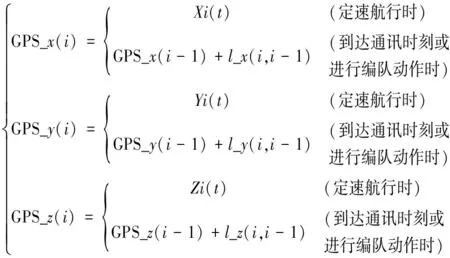
(2)
式(2)中:GPS_x(i),GPS_y(i),GPS_z(i)分別為AUVi的3個坐標(biāo);l_x(i,i-1),l_y(i,i-1),l_z(i,i-1)分別為AUVi相對于AUVi-1的3個坐標(biāo)差;Xi(t),Yi(t),Zi(t)分別為AUVi的預(yù)定航線的3個坐標(biāo)值。
2.2 通信故障處理機(jī)制
當(dāng)編隊(duì)中某一個航行器發(fā)生故障不能正常通信時,只需將其后面所有的航行器的編號都減1,可以繼續(xù)完成后續(xù)編隊(duì)的動作,具體為:不妨假設(shè)編隊(duì)中的AUVk發(fā)生故障,那么AUVk+1在之后的編隊(duì)中就變?yōu)锳UVk,接收AUVk-1發(fā)出的位置信息,AUVk+2就變?yōu)锳UVk+1,接收AUVk發(fā)出的位置信息,依次類推,可以繼續(xù)完成后續(xù)編隊(duì)的動作,當(dāng)編隊(duì)動作執(zhí)行完成后,各航行器的通訊終止,繼續(xù)各自沿各自預(yù)先期望軌跡航行。
3 水下航行器編隊(duì)行為分類
為了方便水下航行器的編隊(duì)任務(wù)管理,根據(jù)幾種常見的編隊(duì)航行模式的特點(diǎn),將水下航行器編隊(duì)航行歸納為3種編隊(duì)行為:定速航行、編隊(duì)轉(zhuǎn)彎以及隊(duì)形轉(zhuǎn)換。
定速航行即編隊(duì)內(nèi)所有航行器保持相對位置不變,朝同一方向以同一速度航行。定速航行是AUV編隊(duì)最常見的編隊(duì)行為,任何編隊(duì)的保持都需要實(shí)現(xiàn)編隊(duì)的定速航行,在此基礎(chǔ)上才能實(shí)現(xiàn)更復(fù)雜的編隊(duì)動作。定速航行最需要注意的問題是航行軌跡的保持,對于傳統(tǒng)主從式編隊(duì)控制策略而言,主航行器由于始終與各從航行器保持通訊,從而實(shí)時校正各航行器在編隊(duì)中的位置,所以航行軌跡保持的難度較低,各航行器的航跡偏差主要取決于各從航行器;弱通訊條件下,航行器之間在定速航行時并不時刻通訊,這樣各航行器由于受擾動而并不容易保持直線軌跡,因此,需要在固定的時間間隔進(jìn)行通訊,以校正各航行器在隊(duì)形中的位置。
編隊(duì)轉(zhuǎn)彎即編隊(duì)內(nèi)的各個航行器向同一方向轉(zhuǎn)過同一角度,轉(zhuǎn)彎完成之后和轉(zhuǎn)彎完成之前航行器的隊(duì)形不變。編隊(duì)轉(zhuǎn)彎是水下航行器編隊(duì)的重要組成內(nèi)容,在一般的編隊(duì)任務(wù)中,編隊(duì)轉(zhuǎn)彎出現(xiàn)的頻率僅次于編隊(duì)定速航行,其應(yīng)用領(lǐng)域包括固定海域掃海探測、障礙物躲避以及目標(biāo)跟蹤監(jiān)視。以3個航行器的編隊(duì)為例,如圖3和圖4所示,編隊(duì)轉(zhuǎn)彎有2種轉(zhuǎn)彎方式,分別為定速度轉(zhuǎn)彎和變速度轉(zhuǎn)彎,定速度轉(zhuǎn)彎是各個航行器在轉(zhuǎn)彎過程中走過的距離相等,速度不變,易于控制,缺點(diǎn)是各個航行器航跡有交叉,在外界擾動下容易發(fā)生碰撞;變速度轉(zhuǎn)彎是各個航行器在轉(zhuǎn)彎過程中比較嚴(yán)格的保持相對的位置關(guān)系,轉(zhuǎn)彎過程中各個航行器的速度會有變化,由于變速度轉(zhuǎn)彎各個航行器之間始終保持一定的位置關(guān)系,因此不易發(fā)生碰撞,但缺點(diǎn)是有可能導(dǎo)致各個航行器的能耗不均。
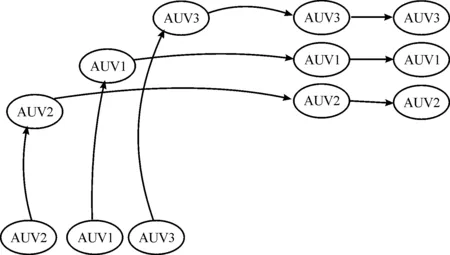
圖3 定速度的橫向編隊(duì)轉(zhuǎn)彎編隊(duì)示意圖Fig.3 Schematic diagram of lateral formation turning at constant speed
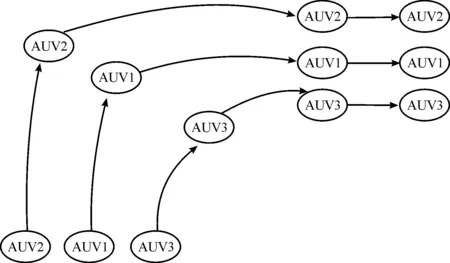
圖4 變速度的橫向編隊(duì)轉(zhuǎn)彎編隊(duì)示意圖Fig.4 Schematic diagram of lateral formation turning with variable speed
隊(duì)形轉(zhuǎn)換即航行器編隊(duì)由一種隊(duì)形形式轉(zhuǎn)換為另一種隊(duì)形形式。例如,圖5所示的航行器編隊(duì)由三角形隊(duì)形轉(zhuǎn)換為橫向隊(duì)形,圖6所示的航行器編隊(duì)由橫向隊(duì)形轉(zhuǎn)換為縱向隊(duì)形等。隊(duì)形轉(zhuǎn)換可使AUV編隊(duì)的功能得到拓展,實(shí)現(xiàn)在不同的任務(wù)條件和航行環(huán)境下選擇合適的編隊(duì)隊(duì)形,實(shí)現(xiàn)任務(wù)效率的提升以及環(huán)境適應(yīng)性的增強(qiáng)。
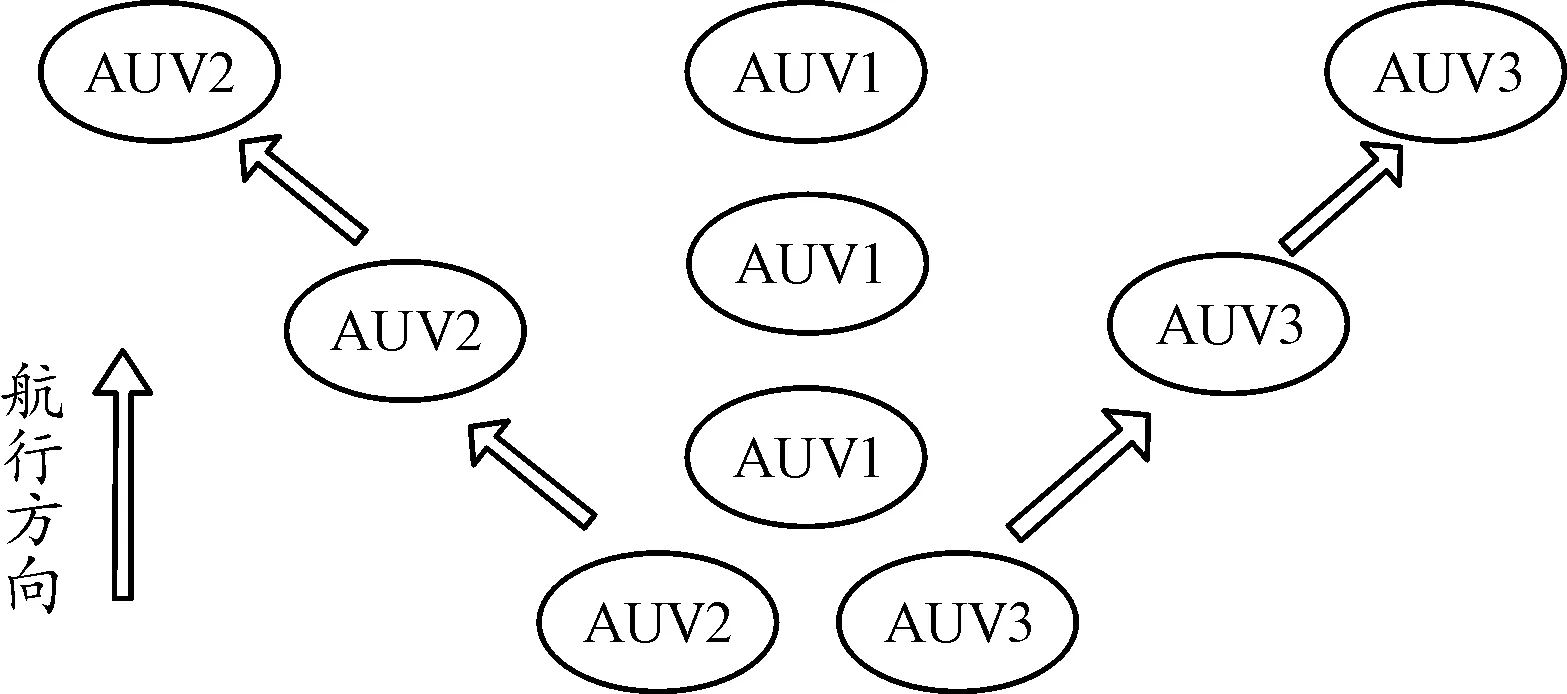
圖5 AUV編隊(duì)由三角形編隊(duì)轉(zhuǎn)換為橫向編隊(duì)示意圖Fig.5 Schematic diagram of AUV formation transferring from triangular formation to transverse formation
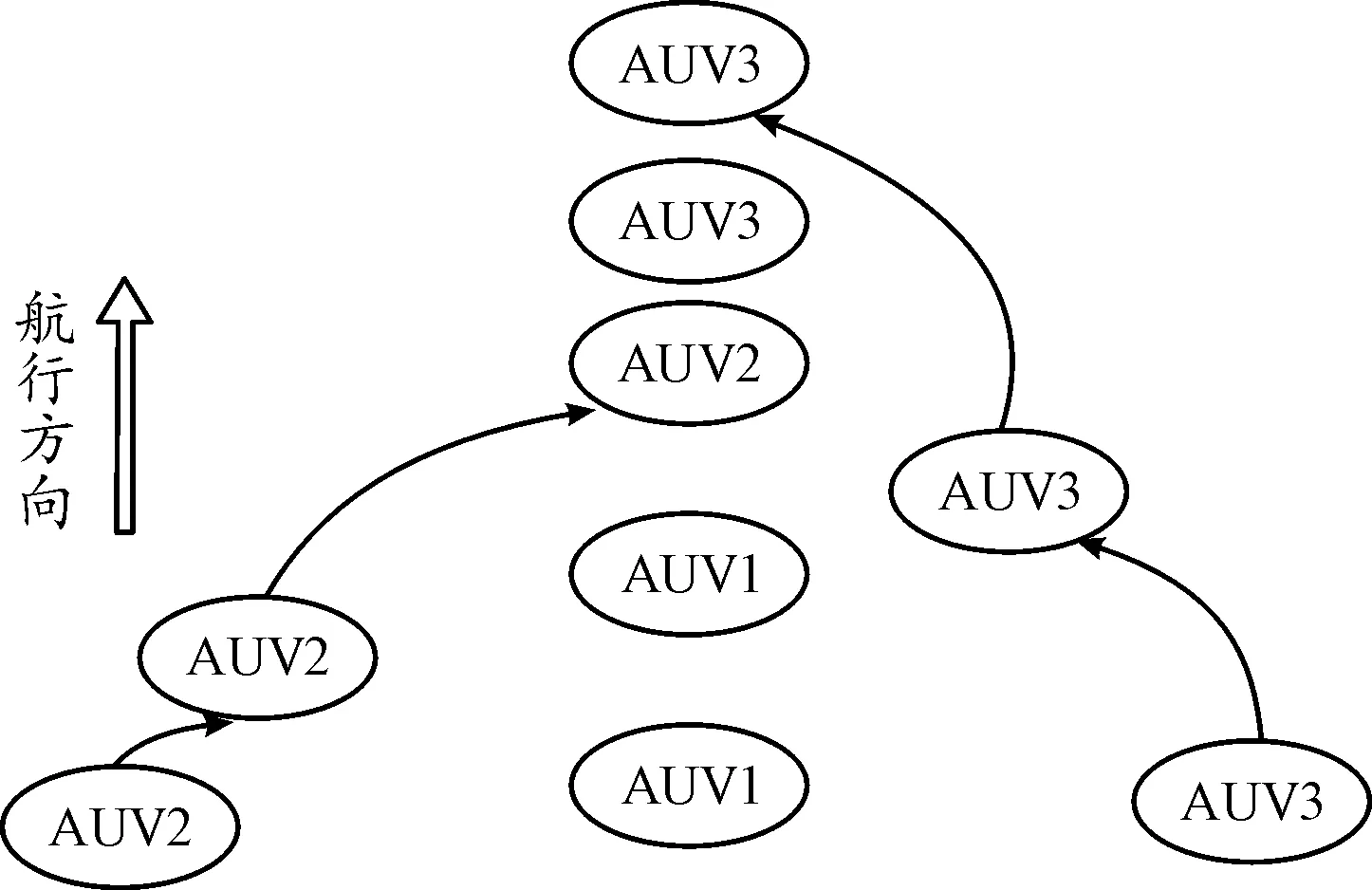
圖6 AUV編隊(duì)由橫向隊(duì)形轉(zhuǎn)換為縱向隊(duì)形示意圖Fig.6 Conversion of AUV formation from transverse formation to longitudinal formation
本文所仿真的3種編隊(duì)隊(duì)形在AUV實(shí)際編隊(duì)任務(wù)中應(yīng)用較為廣泛,其中三角形隊(duì)形具有隊(duì)形縱深較小,機(jī)動靈活的優(yōu)點(diǎn),便于進(jìn)行巡邏及警戒工作;橫向隊(duì)形可以增大航行器編隊(duì)的側(cè)掃聲吶掃描面積以提高探測效率,便于進(jìn)行海洋探測工作;縱向隊(duì)形則便于進(jìn)行避障,有利于提高穿越狹長水道的通行效率。同樣以3個航行器編隊(duì)為例,對于采用傳統(tǒng)主從式的編隊(duì)控制方法,假定AUV1為領(lǐng)航者,AUV2和AUV3為跟隨者,且AUV1的預(yù)定航線的坐標(biāo)值如式(3),對于斜邊為120 m的等腰直角三角形隊(duì)形,則根據(jù)式(1)可得到:AUV2和AUV3的期望坐標(biāo)值即為式(4)和式(5)。對于航行器相鄰間隔為120 m的橫向隊(duì)形,AUV2和AUV3的期望坐標(biāo)為式(6)和式(7)。對于采用弱通訊非主從編隊(duì)控制方法,假定AUV1為機(jī)動發(fā)起者,則在隊(duì)形轉(zhuǎn)換過程中,同樣假設(shè)AUV1的預(yù)定航線的坐標(biāo)值如式(3),則根據(jù)式(2)可得到:對于上述三角形隊(duì)形,AUV2的期望坐標(biāo)與傳統(tǒng)主從式相同為式(4),AUV3的期望坐標(biāo)為式(8)。對于橫向隊(duì)形,AUV2的期望坐標(biāo)與傳統(tǒng)主從式相同為式(6),AUV3的期望坐標(biāo)為式(9)。
(3)
(4)
(5)
(6)

(7)
(8)
(9)
4 水下航行器編隊(duì)行為仿真試驗(yàn)
4.1 對比仿真試驗(yàn)1:水下航行器編隊(duì)定速航行
進(jìn)行水下航行器編隊(duì)行為的仿真試驗(yàn),以3個航行器的編隊(duì)為例,仿真試驗(yàn)設(shè)計(jì)如下:首先進(jìn)行無干擾、無失聯(lián)、且水聲通訊無延時情況下航行器編隊(duì)的定速航行仿真試驗(yàn)。該仿真試驗(yàn)?zāi)M的情形為航行器編隊(duì)沿預(yù)定航線定速直線航行,且保持為橫向編隊(duì),航行器的速度為2 m/s。分別進(jìn)行傳統(tǒng)主從式編隊(duì)控制方法和弱通訊非主從編隊(duì)控制方法的仿真,仿真過程的基本信息設(shè)置如表1所示,且仿真過程中沒有外力干擾,沒有通訊故障。得到3個航行器在平面中的航行軌跡,如圖7和圖8所示。從圖中可看出,在不考慮外界干擾以及沒有通訊故障的情況之下,2種編隊(duì)方法所呈現(xiàn)出的編隊(duì)控制效果基本相同,說明2種方法均能實(shí)現(xiàn)對航行器編隊(duì)的定速航行控制。

表1 仿真試驗(yàn)1基本信息設(shè)置
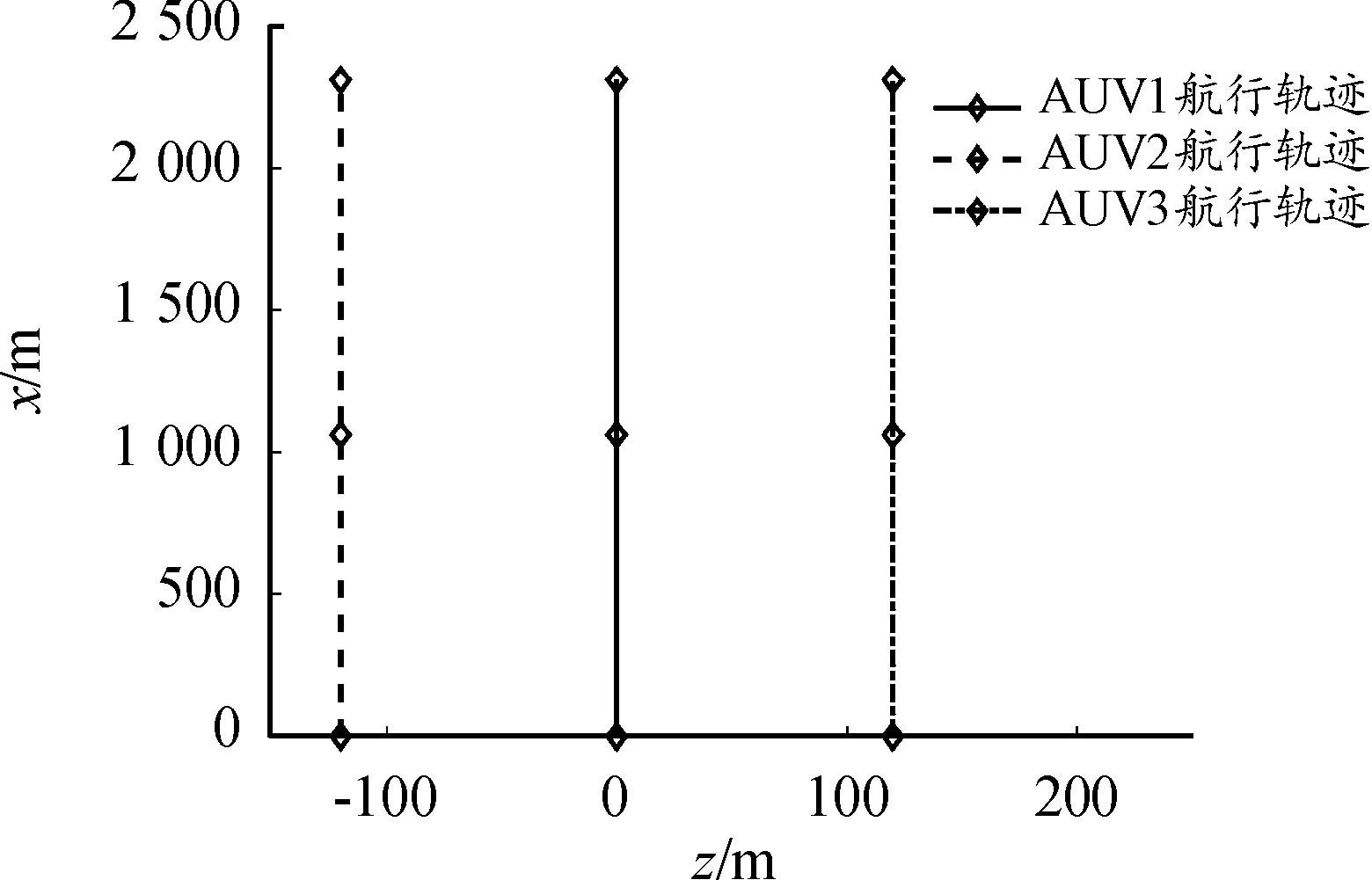
圖7 無海浪干擾及通訊故障條件下傳統(tǒng) 主從式三航行器編隊(duì)的定速航行示意圖Fig.7 Constant speed navigation of traditional master-slave three AUVs’ formation without wave interference and communication failure

圖8 無海浪干擾及通訊故障條件下弱通訊非 主從式三航行器編隊(duì)的定速航行示意圖Fig.8 Constant speed navigation of weak communication non master-slave three AUVs’ formation without wave interference and communication failure
其次進(jìn)行有海浪干擾以及水聲通訊延遲且航行過程中存在通訊故障情況下航行器編隊(duì)的定速航行仿真試驗(yàn)。仿真試驗(yàn)設(shè)計(jì)如下:航行器沿預(yù)定直線進(jìn)行速度為2 m/s的定速航行,且保持為橫向編隊(duì),在時間為300 s時發(fā)生通訊故障,即傳統(tǒng)主從式編隊(duì)中各從航行器失去來自主航行器的信號,弱通訊非主從編隊(duì)中某一航行器失去上位航行器的信號,且在航行過程中受到海浪的干擾,海浪干擾模型類似于文獻(xiàn)[18-19],在仿真過程中,不考慮導(dǎo)航系統(tǒng)的誤差,且由于水聲通訊機(jī)聲波傳輸速率的影響,通訊訊號無法實(shí)時到達(dá)目標(biāo)AUV,假設(shè)聲波在海水中的傳輸速率為vs,則傳統(tǒng)主從式編隊(duì)的第i個AUV由于信號傳輸而造成的通訊誤差時間為:
(10)
式(10)中,ΔTi為第i個AUV的通訊延遲時間。
弱通訊非主從式編隊(duì)的第i個AUV由于信號傳輸而造成的通訊誤差時間為:
(11)
式(11)中,ΔTi為第i個AUV的通訊延遲時間。
仿真過程的基本信息設(shè)置如表1所示。得到3個航行器在平面中的航行軌跡如圖9和圖10所示。從圖中可看出,傳統(tǒng)主從式編隊(duì)在失去通訊時,編隊(duì)受到干擾較大,3個航行器受到不同程度的干擾,且未能保持橫向編隊(duì);弱通訊非主從編隊(duì)中航行器雖然也受到干擾,但因?yàn)楹叫衅髟诓煌ㄓ崟r可以各航行器任務(wù)計(jì)算機(jī)預(yù)置的航線為參考,所以航行器的橫向隊(duì)形保持良好。
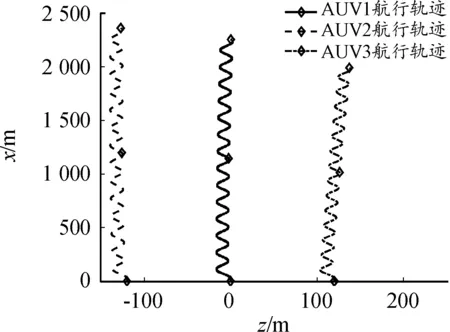
圖9 海浪干擾及通訊故障條件下傳統(tǒng)主從式 三航行器編隊(duì)的定速航行示意圖Fig.9 Constant speed navigation of traditional master-slave three AUVs’ formation under wave interference and communication failure
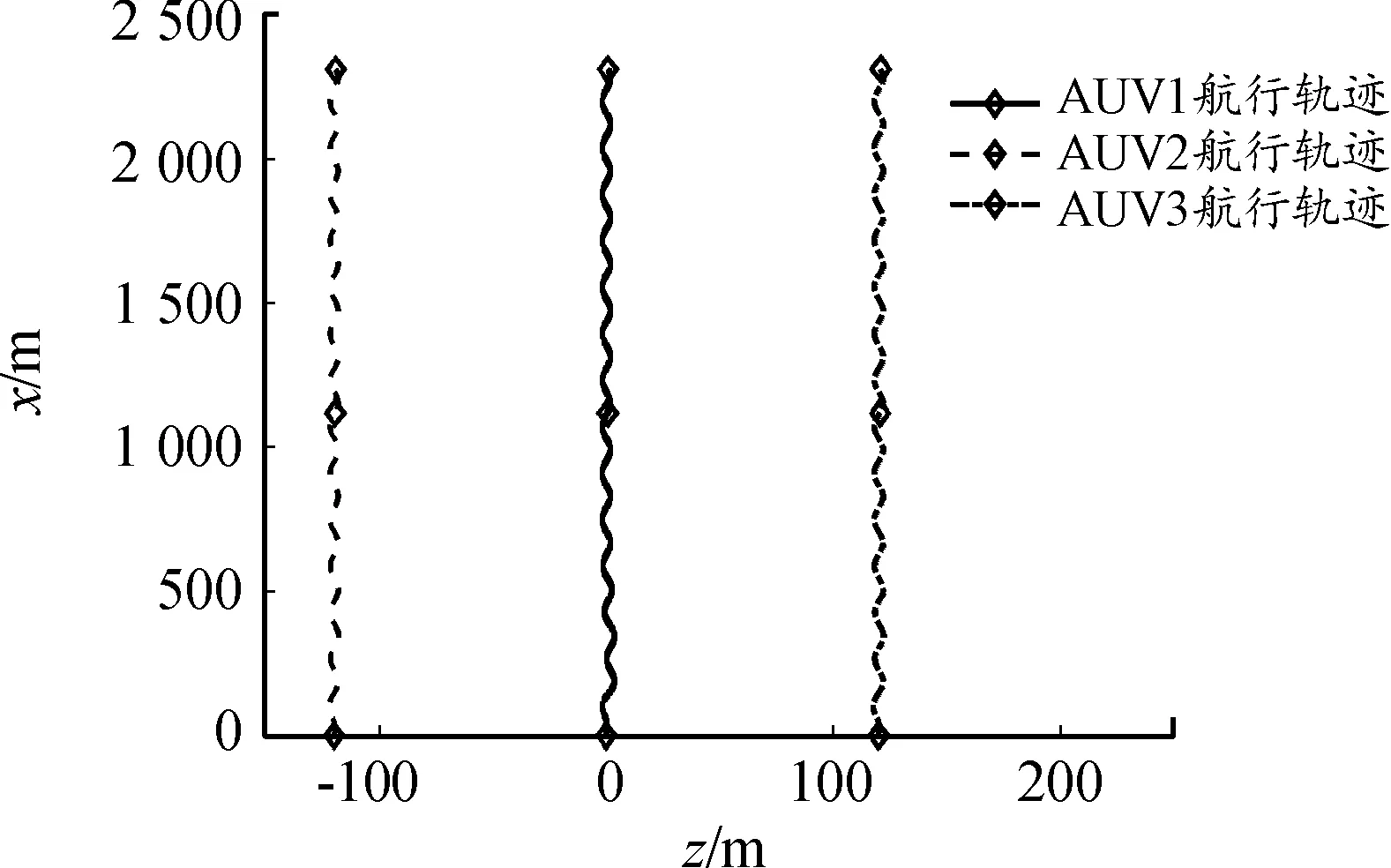
圖10 海浪干擾及通訊故障條件下弱通訊非主從式 三航行器編隊(duì)的定速航行示意圖Fig.10 Constant speed navigation of weak communication non master-slave three AUVs’ formation under wave interference and communication failure
4.2 對比仿真試驗(yàn)2:水下航行器編隊(duì)轉(zhuǎn)彎仿真
進(jìn)行三航行器編隊(duì)的編隊(duì)轉(zhuǎn)彎仿真試驗(yàn),首先進(jìn)行無干擾、無通訊延遲以及無通訊失聯(lián)情況下的編隊(duì)轉(zhuǎn)彎仿真。該仿真試驗(yàn)?zāi)M的情形為航行器橫向編隊(duì)沿預(yù)定航線進(jìn)行90°的編隊(duì)轉(zhuǎn)彎,編隊(duì)轉(zhuǎn)彎應(yīng)避免航行器之間出現(xiàn)碰撞。首先采用定速度方式,分別進(jìn)行傳統(tǒng)主從式的編隊(duì)控制方法和基于弱通訊的非主從編隊(duì)控制方法的仿真,仿真過程的基本信息設(shè)置如表2所示,得到3個航行器在平面中的航行軌跡,如圖11、圖12所示。
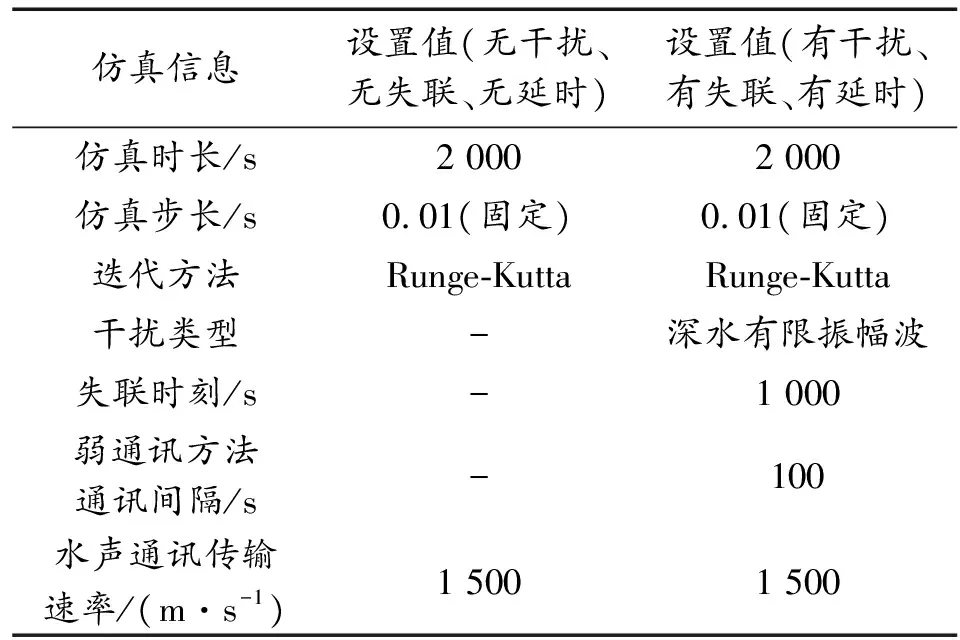
表2 仿真試驗(yàn)2基本信息設(shè)置
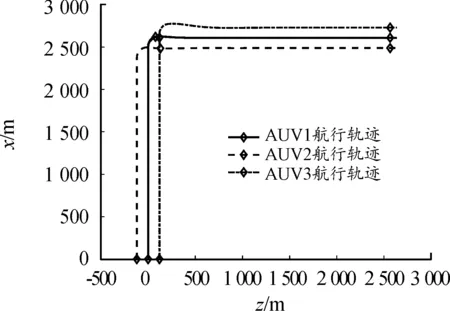
圖11 無海浪干擾及通訊故障條件下傳統(tǒng)主從式 三航行器編隊(duì)的定速度轉(zhuǎn)彎示意圖Fig.11 Constant speed turning of traditional master-slave three AUVs’ formation without wave interference and communication failure
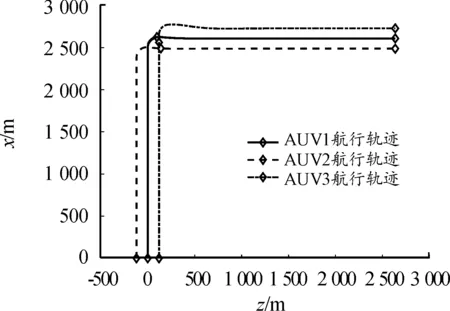
圖12 無海浪干擾及通訊故障條件下弱通信的非主從式 三航行器編隊(duì)的定速度轉(zhuǎn)彎示意圖Fig.12 Constant speed turning of non master-slave three AUVs’ formation with weak communication without wave interference and communication failure
其次考慮采用變速度轉(zhuǎn)彎方式進(jìn)行仿真試驗(yàn),分別進(jìn)行傳統(tǒng)主從式的編隊(duì)控制方法和基于弱通訊的非主從編隊(duì)控制方法的仿真,仿真過程的基本信息設(shè)置見表2,得到3個航行器在平面中的航行軌跡,如圖13、圖14所示。綜合圖11-圖14可知,2種方法在控制編隊(duì)轉(zhuǎn)彎方面效果差異不明顯,均能很好地控制航行器編隊(duì)進(jìn)行90°的轉(zhuǎn)彎,且轉(zhuǎn)彎過程中航行器很好地避免了碰撞。
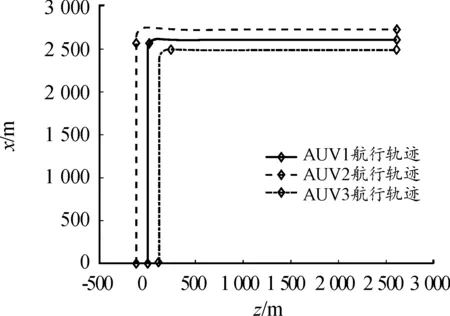
圖13 無海浪干擾及通訊故障條件下傳統(tǒng)主從式 三航行器編隊(duì)的變速度轉(zhuǎn)彎示意圖Fig.13 Variable speed turning of traditional master-slave three AUVs’ formation without wave interference and communication failure
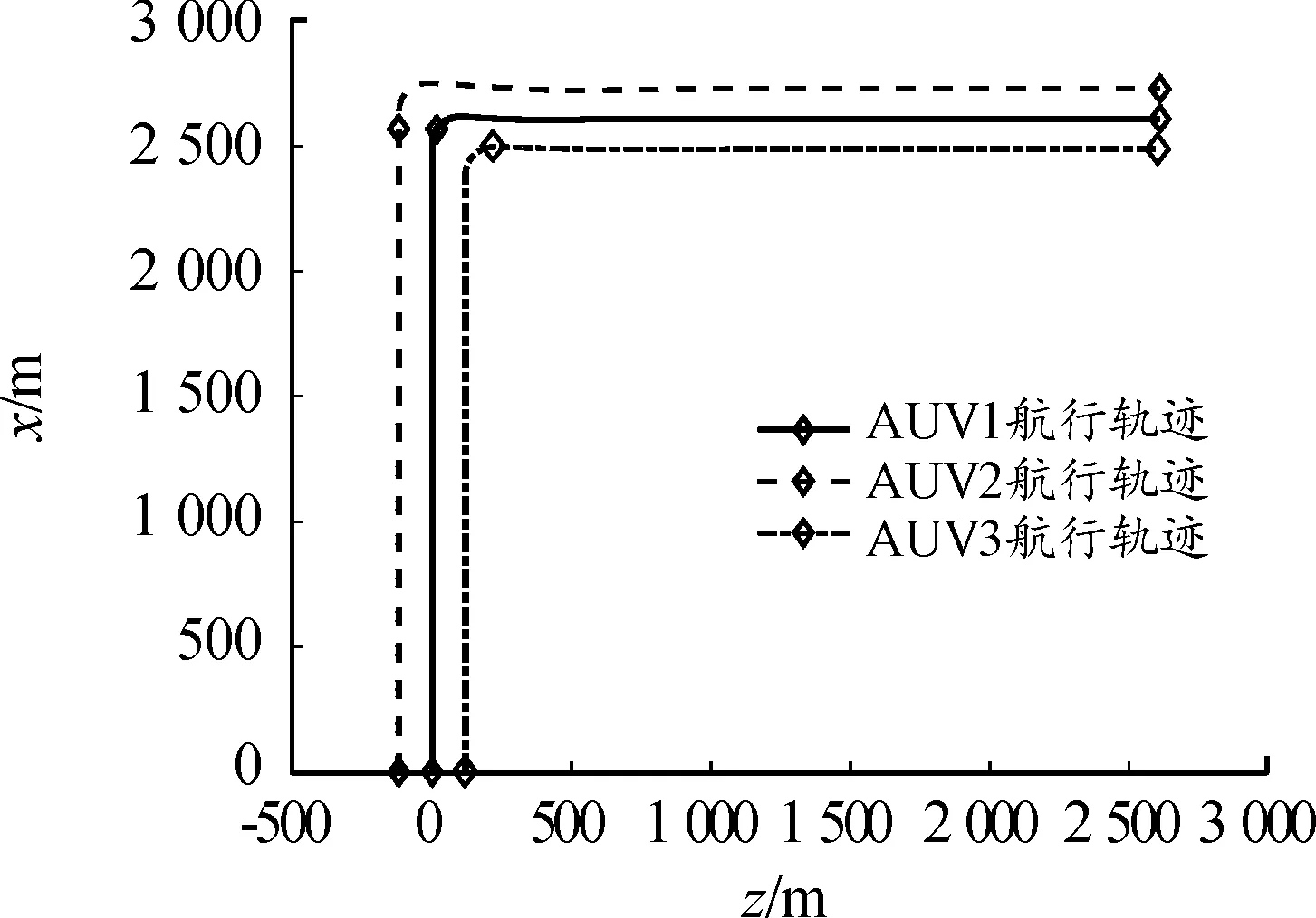
圖14 無海浪干擾及通訊故障條件下弱通信非主從式 三航行器編隊(duì)的變速度轉(zhuǎn)彎示意圖Fig.14 Variable speed turning of weak communication non master-slave three AUVs’ formation without wave interference and communication failure
繼續(xù)進(jìn)行有海浪干擾、通訊延遲以及航行過程中存在通訊故障情況下航行器編隊(duì)的編隊(duì)轉(zhuǎn)彎仿真試驗(yàn)。仿真試驗(yàn)設(shè)計(jì)如下:航行器橫向編隊(duì)沿預(yù)定航線進(jìn)行90°的編隊(duì)轉(zhuǎn)彎,且保持為橫向編隊(duì),在時間為1 000 s時發(fā)生通訊故障,此時刻為航行器編隊(duì)開始進(jìn)行轉(zhuǎn)彎時,即傳統(tǒng)主從式編隊(duì)中各從航行器失去來自主航行器的信號,弱通訊非主從編隊(duì)中某一航行器失去上位航行器的信號,假設(shè)航行器2失去航行器1的信號,仿真過程中受到海浪的干擾,且考慮水聲通訊延遲的影響,傳統(tǒng)主從式編隊(duì)的第i個AUV的通訊延遲為式(10),弱通訊非主從式編隊(duì)的第i個AUV的通訊延遲為式(11),不考慮導(dǎo)航系統(tǒng)的誤差,仿真過程的基本信息設(shè)置見表2。3個航行器在平面中定速度轉(zhuǎn)彎的航行軌跡如圖15、圖16所示,變速度轉(zhuǎn)彎的航行軌跡如圖17、圖18所示。從圖中可看出,傳統(tǒng)主從式編隊(duì)在失去通訊時,編隊(duì)受到干擾較大,在經(jīng)歷編隊(duì)轉(zhuǎn)彎后,3個航行器未能保持橫向隊(duì)形;弱通訊非主從編隊(duì)中航行器1受到海浪干擾脫離編隊(duì),但航行器2和航行器3仍舊能夠保持在同一條垂直于航跡的直線上,航行器的橫向隊(duì)形保持良好。

圖15 海浪干擾及通訊故障條件下傳統(tǒng)主從式 三航行器編隊(duì)的定速度轉(zhuǎn)彎示意圖Fig.15 Constant speed turning of traditional master-slave three AUV’s formation under wave interference and communication failure
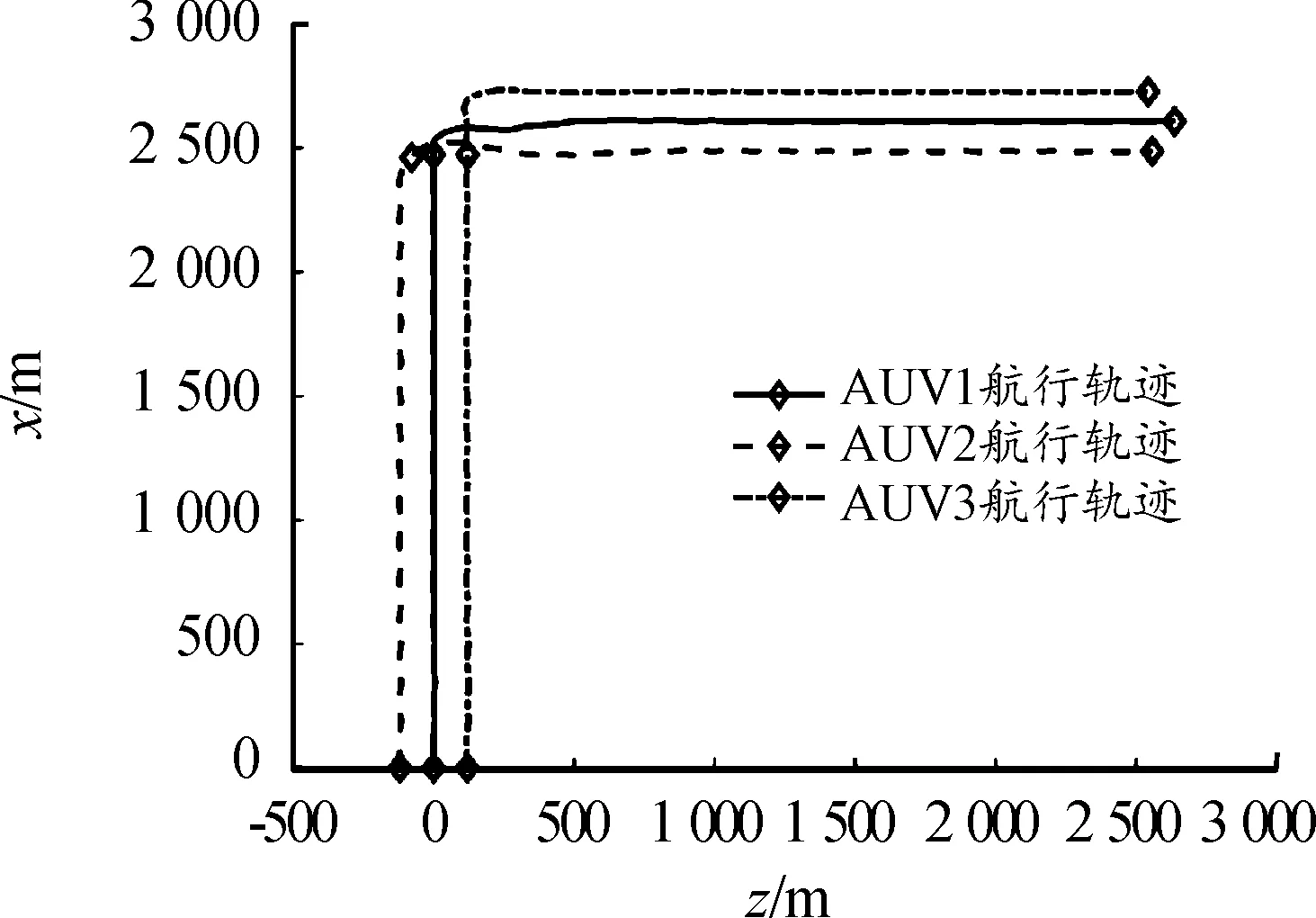
圖16 海浪干擾及通訊故障條件下弱通訊非主從式 三航行器編隊(duì)的定速度轉(zhuǎn)彎示意圖Fig.16 Constant speed turning of weak communication non master-slave three AUVs’ formation under wave interference and communication failure
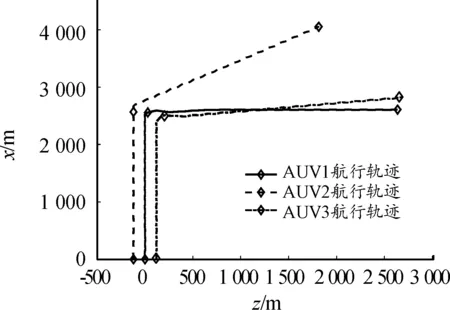
圖17 海浪干擾及通訊故障條件下傳統(tǒng)主從式 三航行器編隊(duì)的變速度轉(zhuǎn)彎示意圖Fig.17 Variable speed turning of traditional master-slave three AUVs’ formation under wave interference and communication failure
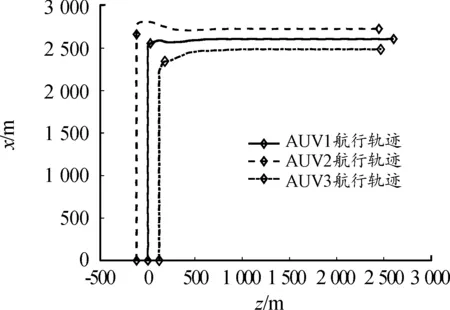
圖18 海浪干擾及通訊故障條件下弱通訊非主從式 三航行器編隊(duì)的變速度轉(zhuǎn)彎示意圖Fig.18 Variable speed turning of weak communication non master-slave three AUVs’ formation under wave interference and communication failure
4.3 對比仿真試驗(yàn)3:水下航行器編隊(duì)隊(duì)形轉(zhuǎn)換仿真
進(jìn)行三航行器編隊(duì)的隊(duì)形轉(zhuǎn)換仿真試驗(yàn),首先進(jìn)行沒有海浪干擾、通訊延遲以及通訊故障時的仿真,該仿真試驗(yàn)?zāi)M的情形為航行器編隊(duì)沿預(yù)定航線進(jìn)行隊(duì)形轉(zhuǎn)換,分別進(jìn)行了傳統(tǒng)主從式編隊(duì)控制方法和弱通訊非主從編隊(duì)控制方法的仿真,仿真過程的基本信息設(shè)置如表3所示,得到航行器在平面中的航行軌跡,如圖19~圖22所示。圖19和圖20展示了航行器由三角形隊(duì)形轉(zhuǎn)換為橫向隊(duì)形,圖21和圖22展示了航行器由橫向隊(duì)形轉(zhuǎn)換為縱向隊(duì)形,根據(jù)不同任務(wù)類型和航行條件選擇合適的編隊(duì)方式是航行器編隊(duì)隊(duì)形轉(zhuǎn)換的主要作用。通過圖19與圖20,圖21與圖22的對比可以得出以下結(jié)論:采用傳統(tǒng)主從式編隊(duì)控制策略的隊(duì)形轉(zhuǎn)換過程中,因?yàn)楦鲝暮叫衅饔星抑挥幸粋€主航行器作為參考點(diǎn),所以其隊(duì)形轉(zhuǎn)換過程響應(yīng)更為迅速,且其軌跡規(guī)劃更為合理。而對于弱通訊非主從編隊(duì)控制策略,由于其在隊(duì)形轉(zhuǎn)換的過程中各航行器有著不同的參考點(diǎn),且與機(jī)動發(fā)起航行器是間接通訊關(guān)系,故其隊(duì)形轉(zhuǎn)換過程的響應(yīng)速度及軌跡規(guī)劃合理性均不及主從式方法,處于通訊鏈末端的航行器尤為明顯,體現(xiàn)在圖中即為航行器編隊(duì)的整體軌跡難以保持對稱,且通訊鏈末端的航行器走過的路程較長。
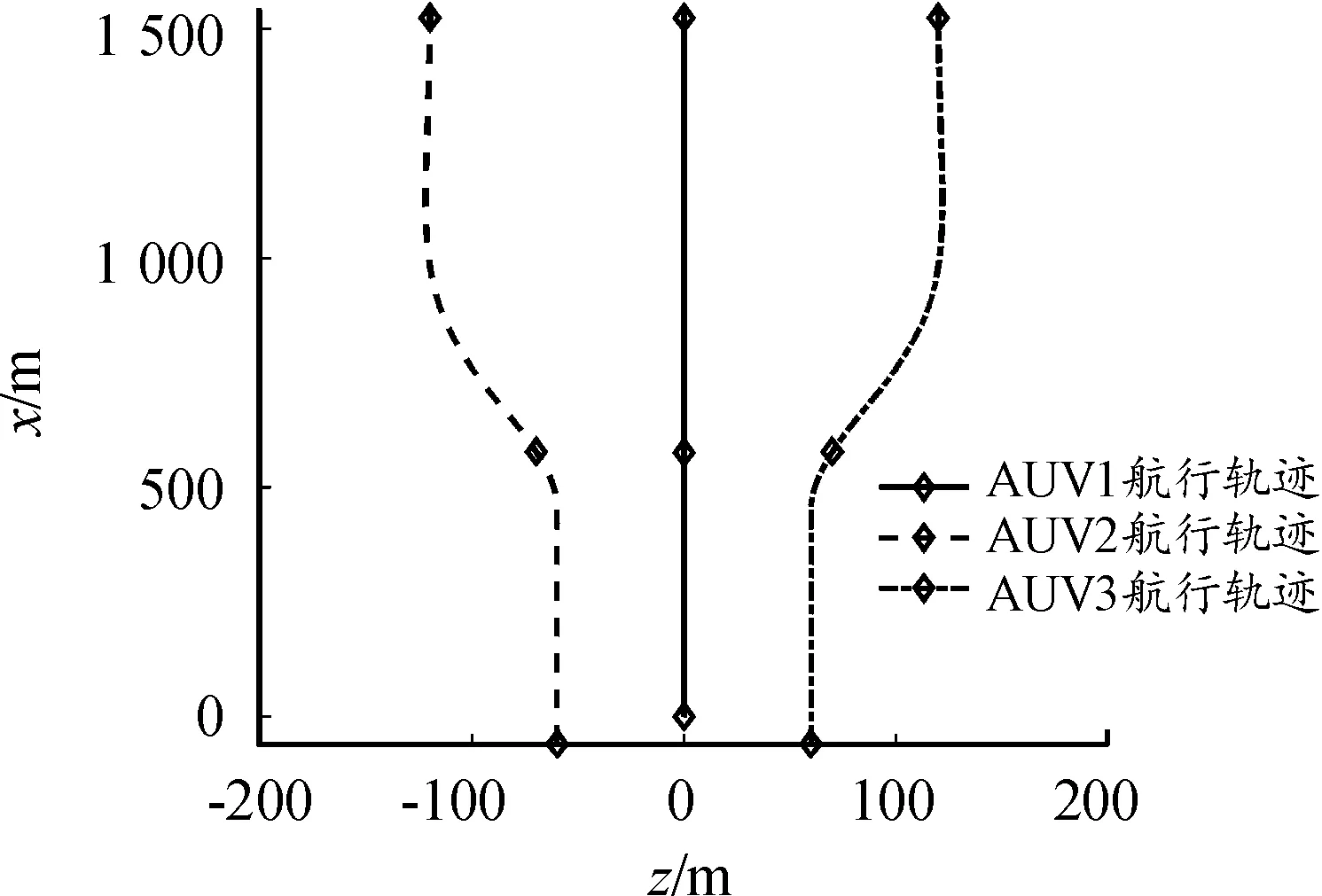
圖19 無海浪干擾及通訊故障條件下傳統(tǒng)主從式 三航行器編隊(duì)的三角隊(duì)形-橫向隊(duì)形轉(zhuǎn)換示意圖Fig.19 Triangular formation lateral formation conversion of traditional master-slave three AUVs’ formation without wave interference and communication failure
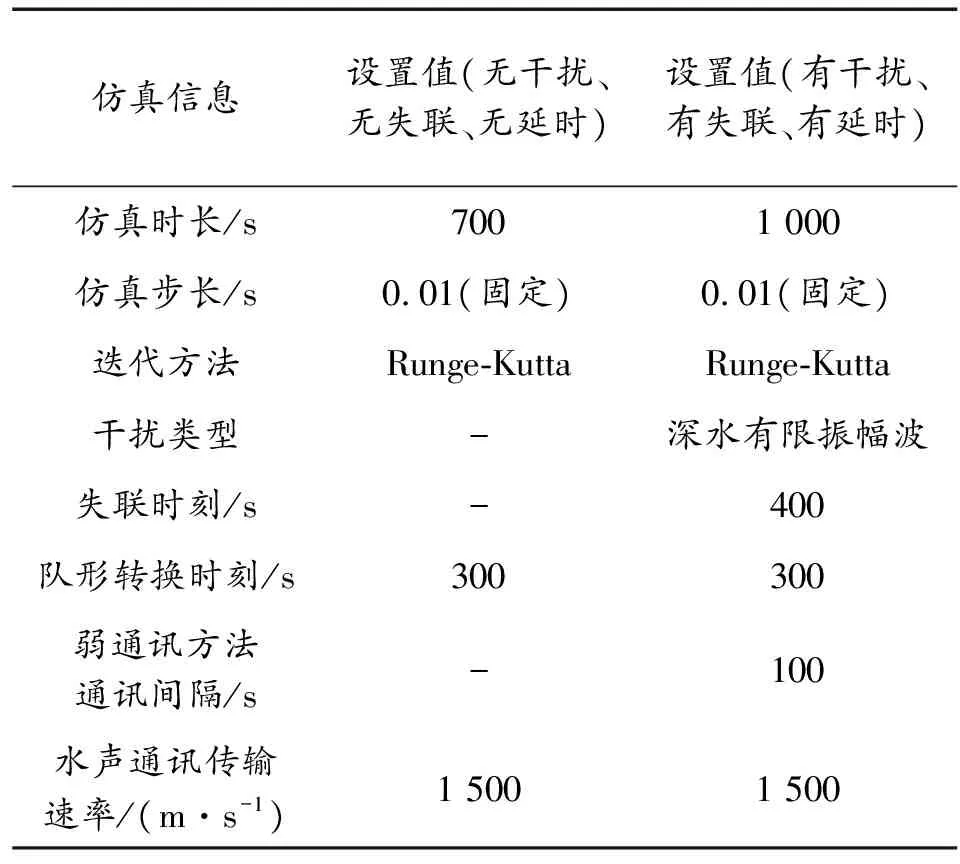
表3 仿真試驗(yàn)3基本信息設(shè)置Table 3 Basic information setting of simulation test 3
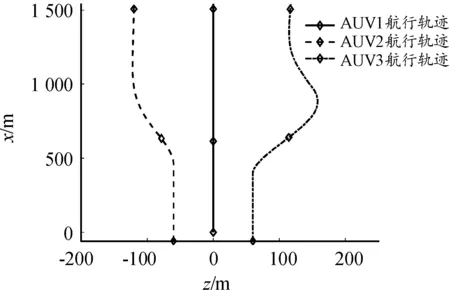
圖20 無海浪干擾及通訊故障條件下弱通信非主從式 三航行器編隊(duì)三角隊(duì)形-橫向隊(duì)形轉(zhuǎn)換示意圖Fig.20 Triangular formation lateral formation conversion of weak communication non master-slave three AUVs’ formation without wave interference and communication failure
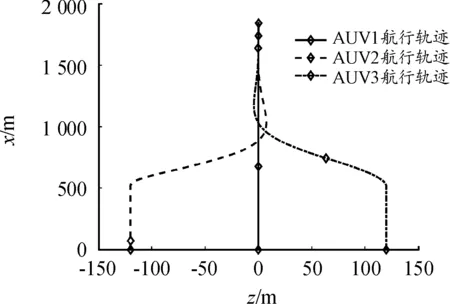
圖21 無海浪干擾及通訊故障條件下傳統(tǒng)主從式 三航行器編隊(duì)的橫向隊(duì)形-縱向隊(duì)形轉(zhuǎn)換示意圖Fig.21 Lateral to longitudinal formation conversion of traditional master-slave three AUVs’ formation without wave interference and communication failure
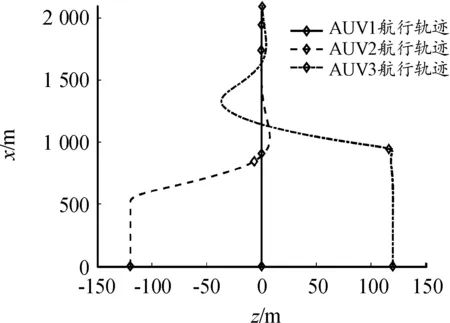
圖22 無海浪干擾及通訊故障條件下弱通信非主從式 三航行器編隊(duì)橫向隊(duì)形-縱向隊(duì)形轉(zhuǎn)換示意圖Fig.22 Horizontal to vertical formation conversion of weak communication non master-slave three AUVs’ formation without wave interference and communication failure
為了驗(yàn)證本文所述弱通訊條件下非主從編隊(duì)方法的特點(diǎn)及優(yōu)勢,繼續(xù)進(jìn)行有海浪干擾、通訊延遲且航行過程中存在通訊故障情況下航行器編隊(duì)的隊(duì)形轉(zhuǎn)換仿真試驗(yàn)。該仿真設(shè)計(jì)如下:航行器編隊(duì)由初始狀態(tài)的三角形隊(duì)形轉(zhuǎn)換為橫向隊(duì)形并繼續(xù)沿預(yù)定航線保持橫向隊(duì)形航行,隊(duì)形轉(zhuǎn)換的時刻為300 s。假設(shè)在時間為400 s時發(fā)生通訊故障,傳統(tǒng)主從式編隊(duì)中各從航行器失去來自主航行器的信號,弱通訊非主從編隊(duì)中航行器2失去來自上位航行器1的信號,仿真過程中受到海浪的干擾,且考慮水聲通訊延遲的影響,傳統(tǒng)主從式編隊(duì)的第i個AUV的通訊延遲為式(10),弱通訊非主從式編隊(duì)的第i個AUV的通訊延遲為式(11),仿真過程不考慮導(dǎo)航系統(tǒng)的誤差,仿真過程的基本信息設(shè)置見表3。3個航行器由三角形隊(duì)形轉(zhuǎn)換為橫向隊(duì)形的航行軌跡如圖23、圖24所示。類似的,可進(jìn)行航行器編隊(duì)在海浪干擾、通訊延遲以及通訊故障下由橫向隊(duì)形轉(zhuǎn)換為縱向隊(duì)形的仿真,仿真過程的基本信息設(shè)置見表3,其中,隊(duì)形轉(zhuǎn)換時間與通訊故障時間不變,分別為300 s和400 s,通訊的延遲時間也不變,得到其航行軌跡如圖25、圖26所示。從以上圖中可看出,傳統(tǒng)主從式編隊(duì)在失去主航行器的通訊時,在海浪干擾下2種隊(duì)形轉(zhuǎn)換均無法完成,2個從航行器因?yàn)闆]有主航行器的引導(dǎo),未能機(jī)動到期望的位置;而采用本文所述弱通訊非主從編隊(duì)的3個航行器在失去航行器1的通訊時,仍完成了2種隊(duì)形的轉(zhuǎn)換,并能夠保持新隊(duì)形繼續(xù)航行,航行器1因?yàn)槭ネㄓ嵠渲荒芡ㄟ^自身導(dǎo)航繼續(xù)航行,所以最后在編隊(duì)中的位置略有偏差,而航行器2和3之間仍可通訊直到完成隊(duì)形轉(zhuǎn)換,繼續(xù)航行仍舊能夠保持在同一條垂直于或平行于航跡的直線上,隊(duì)形保持良好。

圖23 海浪干擾及通訊故障條件下傳統(tǒng)主從式 三航行器編隊(duì)的三角隊(duì)形-橫向隊(duì)形轉(zhuǎn)換示意圖Fig.23 Triangular formation lateral formation conversion of traditional master-slave three AUVs’ formation under wave interference and communication failure
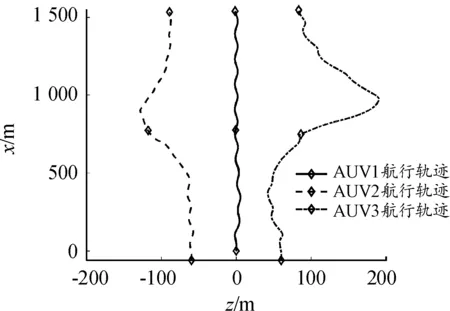
圖24 海浪干擾及通訊故障條件下弱通訊非主從式 三航行器編隊(duì)的三角隊(duì)形-橫向隊(duì)形轉(zhuǎn)換示意圖Fig.24 Triangular formation lateral formation conversion of weak communication non master-slave three AUVs’ formation under wave interference and communication failure
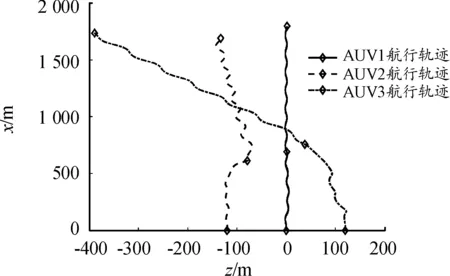
圖25 海浪干擾及通訊故障條件下傳統(tǒng)主從式 三航行器編隊(duì)的橫向隊(duì)形-縱向隊(duì)形轉(zhuǎn)換示意圖Fig.25 Lateral to longitudinal formation conversion of traditional master-slave three AUVs’ formation under wave interference and communication failure
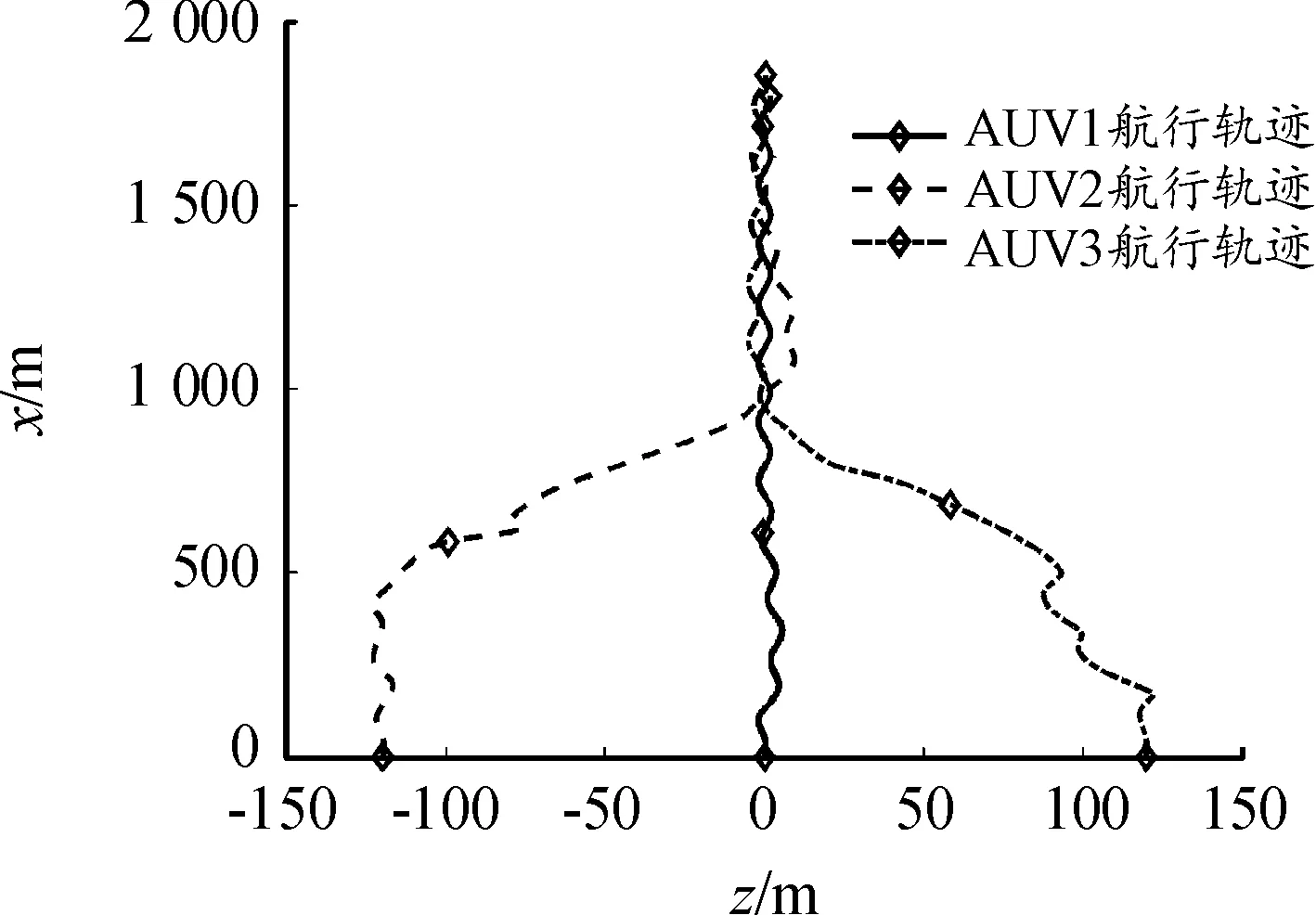
圖26 海浪干擾及通訊故障條件下弱通訊非主從式 三航行器編隊(duì)的橫向隊(duì)形-縱向隊(duì)形轉(zhuǎn)換示意圖Fig.26 Lateral to longitudinal formation conversion of weak communication non master-slave three AUVs’ formation under wave interference and communication failure
5 結(jié)論
1) 所提出的方法能夠在通訊受限、通訊存在一定延遲并且具有一定海浪干擾的條件下有效控制水下航行器編隊(duì)完成各種編隊(duì)行為,包括定速航行、編隊(duì)轉(zhuǎn)彎以及2種常見的隊(duì)形轉(zhuǎn)換。
2) 傳統(tǒng)主從式編隊(duì)控制方法在主航行器通訊故障并且航行器編隊(duì)受到海浪干擾的情況下,不能保持期望的隊(duì)形,且完不成編隊(duì)轉(zhuǎn)彎以及隊(duì)形轉(zhuǎn)換。
3) 相比傳統(tǒng)主從式編隊(duì)方法,所提出的方法具有通訊質(zhì)量要求低、編隊(duì)失效風(fēng)險低的優(yōu)點(diǎn)。
4) 相比傳統(tǒng)主從式編隊(duì)方法,所提出的方法在某些情況下由于參考位置信息的間接性,位于通訊鏈末端的航行器運(yùn)動軌跡規(guī)劃容易受到影響,導(dǎo)致走過的路徑偏長,該問題有待通過算法優(yōu)化改進(jìn)。
猜你喜歡
《學(xué)習(xí)方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
數(shù)學(xué)小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
當(dāng)代貴州(2019年41期)2019-12-13 09:28:56
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
中國共青團(tuán)(2015年7期)2015-12-17 01:24:38
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
