一種無人集群自組網網絡管理系統設計
2022-01-10 07:52:40楊道錕盧艷玲張亞師王振領
彈箭與制導學報 2021年5期
關鍵詞:系統
楊道錕,盧艷玲,張亞師,賈 碩,王振領
(西安現代控制技術研究所,西安 710065)
0 引言
無人集群是以分布式協同控制和自組網技術為支撐的大規模低成本作戰系統,具有數量眾多、協同任務、協同探測、協同攻擊的特點,可極大提高單一無人機節點的作戰效能,是顛覆未來作戰樣式的一種重要形式。隨著美國在2014年開始開展拒止環境下協同作戰項目[1]、小精靈項目[2]、進攻性蜂群[3]項目后,英國、歐盟、俄羅斯等也相繼開展了集群系統研究,國內多家研究所和高校也主要圍繞蜂群任務分配、編隊控制和航機規劃等關鍵技術開展集群前沿課題研究。無人集群系統雖然具有較多優勢,但也存在大規模自組網通信、網絡重構、網絡監控與規劃等網絡管理技術問題。
1 無人集群網絡管理現狀分析
無人集群系統執行作戰任務時,通常節點數量眾多,例如美國捕食者無人機在出動任務時一般采用4機編隊,而在美軍“阿爾法計劃”仿真演示中甚至使用了 100 架無人機[4],大規模的無人機操控給地面操控人員帶來了極大的挑戰,需要操控人員根據集群系統的自主情況,決定介入或者輔助控制集群系統管理。
美國DARPA在OFFSET項目[3]初稿中提出要發展蜂群戰術開發生態系統及支撐性的開放系統架構,包括先進的人-蜂群界面,讓用戶同時實時監控和指揮數量龐大的蜂群無人平臺,并在項目第二階段中將人機協同交互合同授予凱斯西儲大學、查爾斯河分析公司和西北大學,并在《美國空軍無人機系統飛行計劃2009—2047》中提出一名操作人員將可以操控多架無人機實施“更加集中、更加持續、更具規模”的集群打擊,到 2047 年完成 “觀察-判斷-決策-行動”(OODA)回路的時間縮短為μs,甚至ns級。操作人員的作用也逐漸由“人在回路之內”轉變為“人在回路之上”到“人在回路之外”。
國內國防科學技術大學提出了大規模無人機管理與控制是無人集群系統的關鍵問題,需要研究空域、態勢、有人干預相結合的集群管理技術[4];中國電子科學研究院在研究無人集群城市作戰情況下提出人機協同技術、人機交互技術等方面的研究是無人集群作戰應用的關鍵技術[5]。
文中通過研究無人集群系統自組網的網絡管理,探討無人集群系統實時狀態感知和人機交互,為無人集群系統狀態監控、集群協同偵察情報的高效展現,集群的高效控制提供思路。
2 自組網網絡管理系統設計
自組網網絡管理系統與無人集群系統的任務和功能緊密相關,具有無中心、自組織、網絡拓撲可變、任務執行可調的特點[7-10],通過借鑒典型無人機地面站的功能和配置[11-13],提出網絡管理系統應具有以下典型功能。
1)網絡狀態監控
能夠匯集無人集群系統網絡狀態,并根據網絡結構和集群任務情況,實時展示系統網絡規模、網絡結構和網絡連通狀態,提供任務全程的任務狀態與網絡狀態關聯情況。
2)鏈路狀態監控
根據節點間的鏈路狀態,實時提供節點的完整鏈路狀態信息和整網鏈路情況,實時反映無人集群飛行任務的隊形、移動性對鏈路穩定性的影響,并給出相應的告警信息,提醒操作人員關注節點的任務狀態。
3)網絡拓撲監控
能夠結合網路狀態、網絡拓撲結構、任務地圖,可視化展示網絡受節點移動、地理環境、編隊環境的影響,為操作人員提供網絡拓撲與任務的動態關系。
4)網絡規劃管理
根據任務需求預先規劃網絡結構、網絡流量、時隙分配狀態,便于自組網快速部署,增加無人集群系統的任務執行速度和成功率。
5)全網信息管理
能夠通過實時記錄、分類、分析全網信息狀態,快速定位故障節點和故障原因,給無人集群系統的優化、故障排除和任務臨時變更提供必要的全局數據分析記錄手段。
6)全網應急控制能力
在網絡某一節點發生意外時,能及時定位并采取緊急控制,將故障節點轉移出集群任務或設定獨特的任務要求,保證整個無人集群系統的正常工作,避免節點飛行異常導致的集群系統任務失敗。
7)隨機接入權限管理
由于自組網網絡管理可以監控、控制、記錄和分析無人集群下的網絡狀況、節點情況和任務執行情況,因此需要嚴格管理操作網絡管理系統人員的權限,避免因誤操作或非法操作所導致的集群任務失敗情況,提供安全可靠的網絡管理能力。
3 自組網網絡管理系統組成
自組網網絡管理系統主要由通信管理、配置管理、網絡狀態監控、鏈路狀態監控、告警管理、日志管理、視頻管理、拓撲管理、應急管理、用戶權限管理、數據分析等功能模塊組成,如圖1所示。
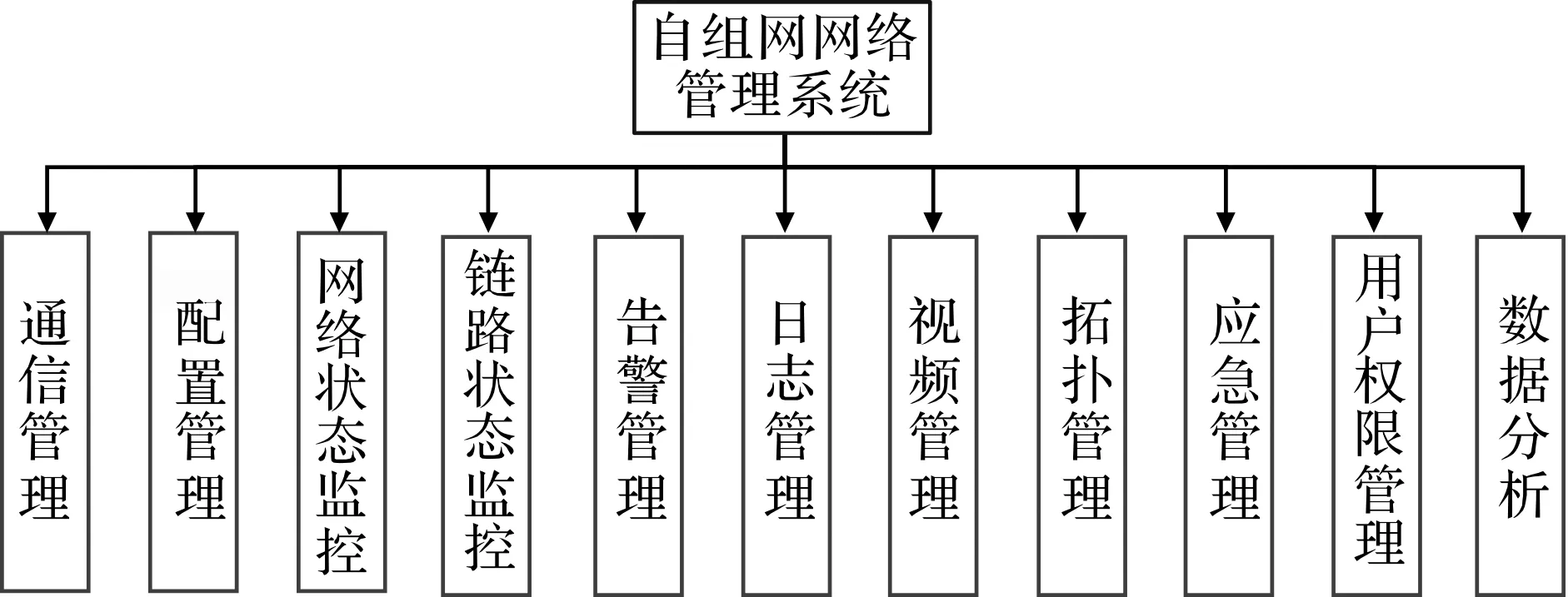
圖1 自組網網絡管理系統功能模塊組成
4 自組網網絡管理系統軟件設計
為了便于自組網網絡管理進行擴展,網絡管理系統采用層次性結構設計,分為前端界面、后端邏輯、接口通信、數據存儲等4層架構。通過設置通信接口,信息流進入到接口通信緩存中,后端邏輯對各端口緩存信息按照通信協議解析后生成相應無人集群節點群/簇狀態和節點鏈路狀態,從而產生相關的狀態展示圖和告警圖示,并根據相關操作完成數據分析、數據存儲功能。
前端界面層是自組網網絡管理系統的人機交互界面,負責將無人集群自組網系統的網絡狀態直觀、有效的展示給操作人員。為了能夠將復雜繁多的無人集群網絡狀態有效展示出來,按照人類注意力機制,視覺的焦點集中在中心、標簽等圖例上,視線移動方向也傾向于左上-中間-左下-右下的方向,通過圖形變化、顏色變化吸引操作人員的視線方向。界面采用一致性原則,提示、菜單、按鍵采用相同的顏色、大小、字體等,并在每個操作序列中增加反饋信息。
為了滿足集群系統大規模無人機節點工作的情況,網絡管理系統提供直觀的網絡狀態信息,采用網絡拓撲圖和地圖拓撲圖相結合的方式,軟件默認顯示網絡拓撲圖,并允許用戶開啟地圖拓撲圖模式,地圖拓撲圖是網絡拓撲圖在地面界面上的疊加。網絡拓撲圖采用簡單的“點-線”模式實現復雜網絡拓撲的可視化,通過實時解算集群系統的群內狀態、群間狀態、節點狀態,形成如圖2所示的拓撲結構。節點在網時,該節點自動顯示并根據與其他節點狀態形成拓撲結構,若節點與其他節點狀態變化時,節點間連線將變為黃色、紅色等警示色,示意當前狀態異常。節點退網時,拓撲圖實時更新,消除退網節點,形成新的網絡拓撲結構,并通過彈窗給操作人員提示。
為了清晰展示大規模集群節點,網絡管理系統結合集群系統任務情況,將網絡拓撲圖按群劃分,每個群代表一個子任務,操作用戶根據子任務執行情況實時監控網絡情況,并在任務結束后,將子任務網絡拓撲圖匯總,形成新的網絡拓撲圖。
告警圖采用如圖3所示的統計方式將網絡中的基本狀態展現給操作人員,讓操作人員可以清晰的看到網絡總業務流量、全網節點狀態變化情況、各任務中節點狀態,了解任務執行中網絡狀態的變化趨勢,及時管理任務執行。

圖3 網絡告警圖設計
后端邏輯主要通過C++完成,通過設置端口管理邏輯,完成拓撲圖生成、地圖加載、協議解析和數據分析等操作。具體流程是協議解析模塊將通信接口中的數據按照通信協議解析,各模塊按照自身功能解析并分析、存儲數據,并實時將網絡變化信息、鏈路變化信息、告警數據發送至前端界面,更新前端界面顯示。后端邏輯操作的數據流如圖4所示。
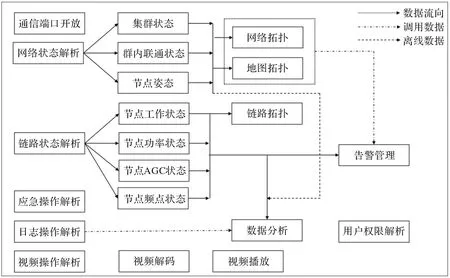
圖4 后端邏輯設計
5 試驗驗證
通過4架實體旋翼無人機和操控軟件生成的虛擬無人機進行軟件烤機試驗,試驗結果如表1所示,網絡管理軟件能夠較好的為操作人員提供必要的網絡狀態監控和管理,并及時提供節點網絡異常和網絡丟失的情況。
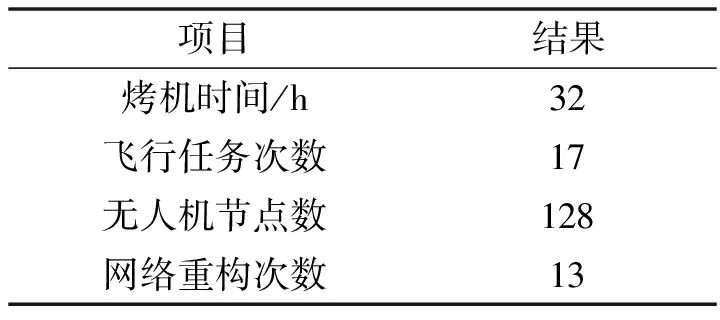
表1 試驗結果
6 結束語
依據無人集群系統的工作特點,研究了自組網網絡管理系統應具有的核心功能,并按照這些功能設計了一種無人集群項目的自組網網絡管理系統,該系統能夠實時監控自組網系統網絡狀態和飛行過程中各節點狀態。通過該系統,操作人員從以往的單/雙節點網絡狀態管理變成了128個節點同時管理的狀態,為無人集群系統的飛行任務提供良好的操作依據。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
