基于骨架的路面裂紋最大寬度檢測
2021-12-22 05:34:52代維康
無損檢測 2021年11期
代維康,雷 斌,2,蔣 林,2
(1.武漢科技大學 機械自動化學院,武漢 430081;2.武漢科技大學 機器人與智能系統研究院,武漢 430081)
截至2018年年底,我國公路通車里程達484.65萬公里,其中高速公路14.25萬公里,規模居世界第一[1]。隨著使用年限的提升,大量道路開始出現破損,如果不及早檢測,將會給國家和人民帶來巨大的財產損失。因此,自動化路面檢測系統的開發尤為重要。
裂紋(指路面裂紋)最大寬度是裂紋最具代表性的特征。在計算裂紋最大像素寬度方面,國內外相關專家學者提出了大量方法。王中宇等[2]針對表面裂紋邊緣輪廓的不規則性,提出了一種分段寬度評定方法。該方法在獲得裂紋的表面圖像后,對圖像沿縱向進行分段,然后用Ferret算法分別對每段裂紋的寬度進行評定。方志等[3]將裂紋邊緣擬合成兩條曲線,然后再計算每個邊緣點對應的裂紋寬度,得出最大寬度點。JIN等[4]提出一種柔性核來計算裂紋寬度,首先提取裂紋骨架,將裂紋骨架作為內切圓圓心,以此來計算裂紋的最大寬度。曹梅麗[5]運用數字散斑相關原理進行像素標定與裂紋長度的像素搜索計算,進而用亞像素原理解決了測量裂紋寬度時,整像素分辨率不夠的技術難點。程豐[6]在提取出裂紋對象后,用裂紋的像素點總數與裂紋骨架的像素點數的比值來作為裂紋嚴重程度的標準。丁寧等[7]采用K-means聚類算法將網狀裂紋分成多個單分支裂紋,然后再分別計算單分支裂紋的最大寬度,這種方法能有效檢測網狀裂紋的寬度,相對誤差為2.968%。王鵬[8]用裂紋對象的最小外包矩形的長寬比來衡量裂紋的伸展情況,該方法雖簡潔高效,但測量精度較低。
計算得到裂紋的像素寬度后,需要將像素寬度轉換為實際寬度。傳統方法采用單目攝像頭進行定高垂直拍攝,根據針孔成像模型將像素寬度轉換為實際尺寸[9];也有一些裂紋檢測系統采用標記物標定法,即在圖像中放置一個定長標記物,通過比例換算計算出每個像素的實際寬度。
傳統的像素寬度計算法更適用于單分支裂紋,需要將多分支裂紋分割為單分支裂紋后逐個計算像素寬度,計算流程過于復雜,且分割過程易引入誤差,同時,傳統的標定方法在實際應用中存在一定的難度,其標定條件要求的應用環境過于理想,嚴重影響檢測速度和精度,很難滿足應用需求。
筆者設計了一套雙目視覺采集系統,以樹莓派連接USB雙目攝像頭作為圖像采集設備,利用socket編程將拍攝到的圖片傳輸到計算機,通過圖像處理技術獲取裂紋對象。為了高度適應各形態的裂紋,筆者提出了一種基于骨架的邊緣腐蝕算法,用于計算裂紋的最大像素寬度,并通過雙目標定,將獲取的最大寬度像素坐標轉換為世界坐標,從而計算出裂紋的實際最大寬度。
1 基于雙目攝像頭的路面裂紋最大寬度檢測系統
在實際工程應用中,路面裂紋的形狀呈現無規律性、復雜性的特點[10]。常見裂紋種類及其形狀如圖1所示。
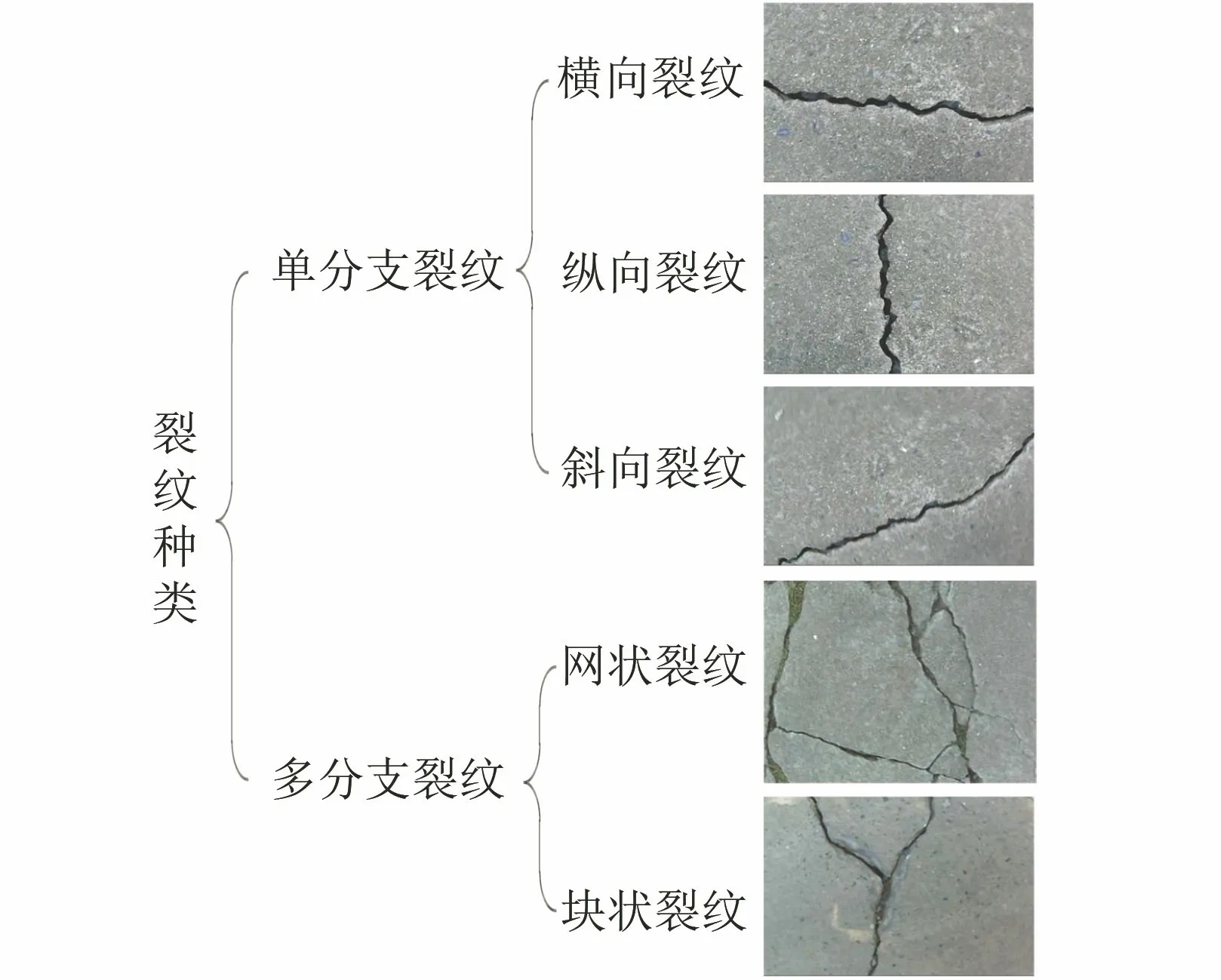
圖1 常見裂紋種類及其形狀示意
由于骨架能夠反映裂紋的拓撲結構[11],首先利用ZHANG等[12]的骨架化算法對裂紋進行迭代細化,在進行一次完整的骨架提取后,記錄下迭代刪除次數N,將其作為第二次細化操作的種子,再對原裂紋對象進行N-1次細化。將兩次骨架化的差集記為M,然后對差集M進行基于距離的閾值濾波,去除孤立點,得到點集P。利用最小二乘法,將點集P擬合成一條相切于骨架的直線L,L的正交線與裂紋對象邊緣的兩個交點就是最大裂紋寬度點。在得到裂紋最大像素寬度所在的位置后,通過標定雙目相機,將像素坐標轉換為世界坐標,得到裂紋的實際最大寬度。整個計算流程如圖2所示。
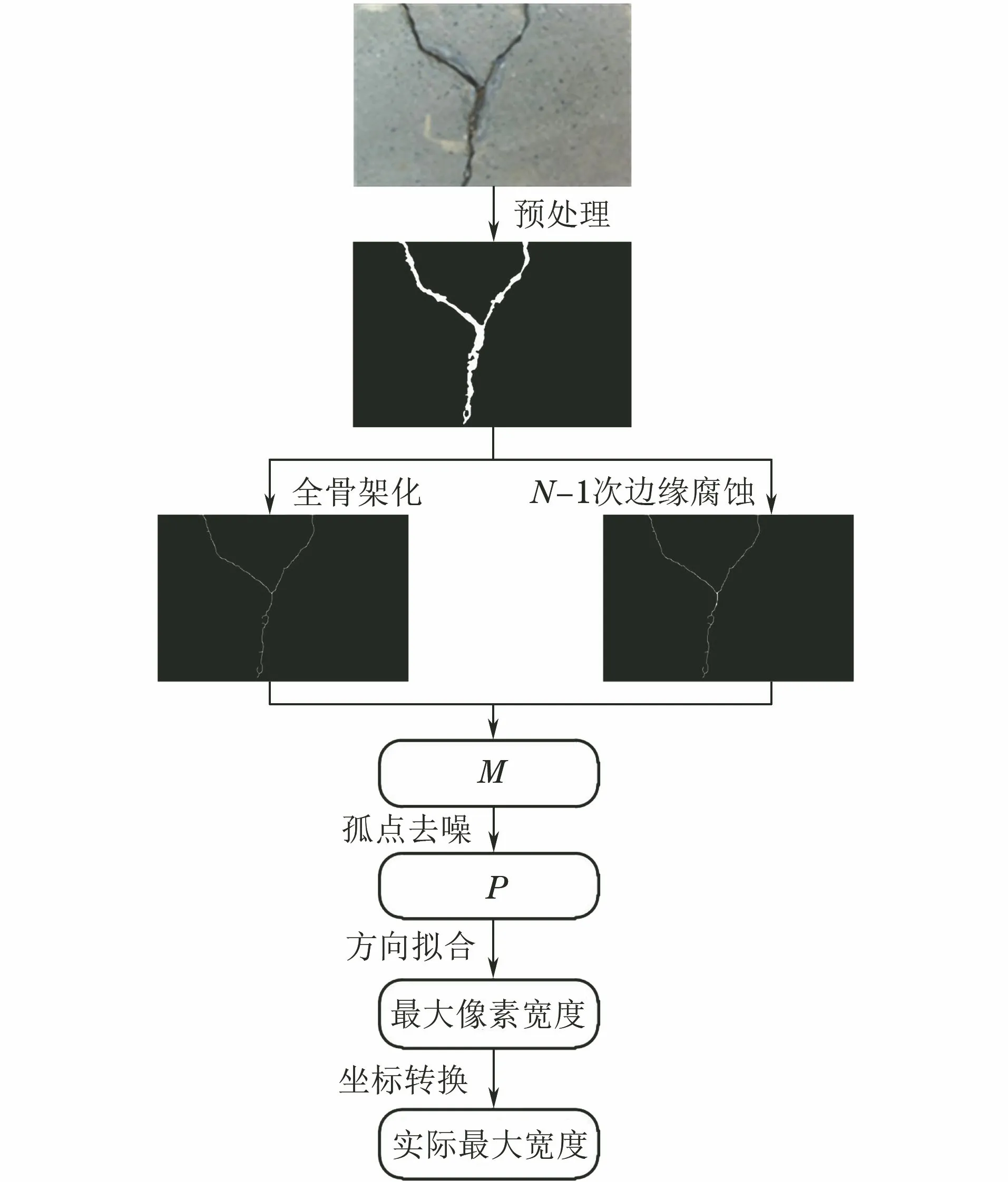
圖2 邊緣腐蝕算法計算像素寬度的流程
1.1 基于骨架的邊緣腐蝕算法
1.1.1 圖形預處理
裂紋檢測系統拍攝得到的原始圖像存在很多噪聲[見圖3(a)],需要對圖像進行一系列預處理,去除噪點,以獲取裂紋對象。具體步驟如下所述。
(1) 對原始圖像進行灰度化、中值濾波,并利用自適應閾值分割法對圖像進行二值化,得到具有白色前景、黑色背景的二值圖像[見圖3(b)]。
(2) 利用形態學開操作,去除二值圖像中細小的前景噪聲[開操作是對圖像進行基本的形態學組合操作(先腐蝕后膨脹),見圖3(c)]。
(3) 遍歷所有連通域,并計算出所有連通域的面積,設置一個面積閾值,利用面積剔除法,保留閾值以上的部分作為裂紋對象[見圖3(d)]。
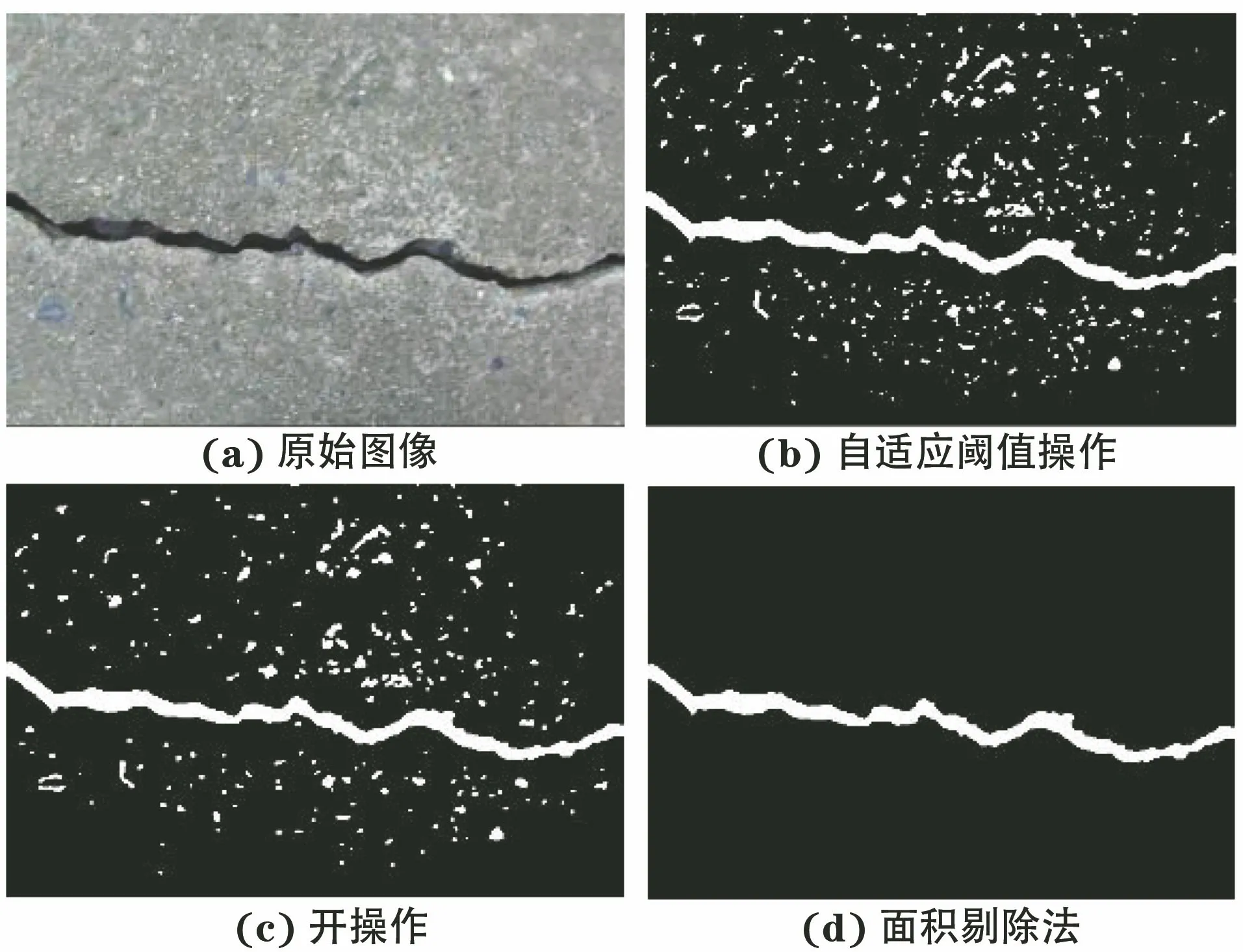
圖3 裂紋預處理各階段獲得的圖像
1.1.2 獲取裂紋最大寬度位置
提取出完整的裂紋對象后,需要對裂紋進行迭代細化處理。每一次迭代細化就是對滿足式(1),(2)的像素點進行刪除的過程。
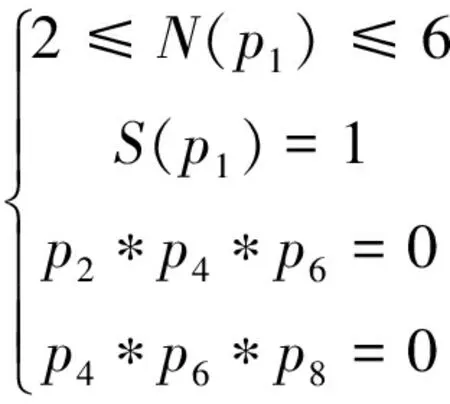
(1)

(2)

(3)
[f(p9)=0&&f(p2)=1]
(4)
式中:pi(i=1,2,…,9)為卷積窗口中的9個像素點,f(pi)為pi處的像素值,S(p1)為像素鄰域連續兩個像素值為0,1的次數。
裂紋骨架化的過程可以理解為對裂紋進行邊緣腐蝕剝離的過程,每迭代一次會刪除邊緣上滿足刪除條件的像素點,直到所有像素點不滿足刪除條件時,循環停止。當裂紋剝離循環到最后一次時,仍然滿足細化條件的像素位置為裂紋最大寬度所在位置。裂紋分步細化過程得到的圖像如圖4所示,圖中白色為分割出來的裂紋,黑色為背景,紅色為當前條件下迭代骨架后的結果。隨著迭代次數的增加,可以明顯發現裂紋較細位置優先實現了骨架化。
算法的整個過程需要進行兩次骨架化操作,第一次骨架化是全骨架化,對裂紋對象不斷迭代細化,直到沒有滿足刪除條件的像素點為止,圖片記為TN,并將細化次數N作為第二次骨架化的迭代種子數。第二次骨架化是對裂紋進行N-1次細化,細化得到裂紋骨架和一些非骨架像素點(見圖5,紅色為骨架),這些像素點稱為最大凸點m,最大凸點的集合為最大凸點集(即兩次骨架化的差集),記為M(m1,m2,m3,…)。將完成上述兩次細化操作后得到的圖片記為TN-1。為了更好地可視化凸點,筆者放大了最大凸點位置,如圖5中藍色點所示。最大凸點集M表示為
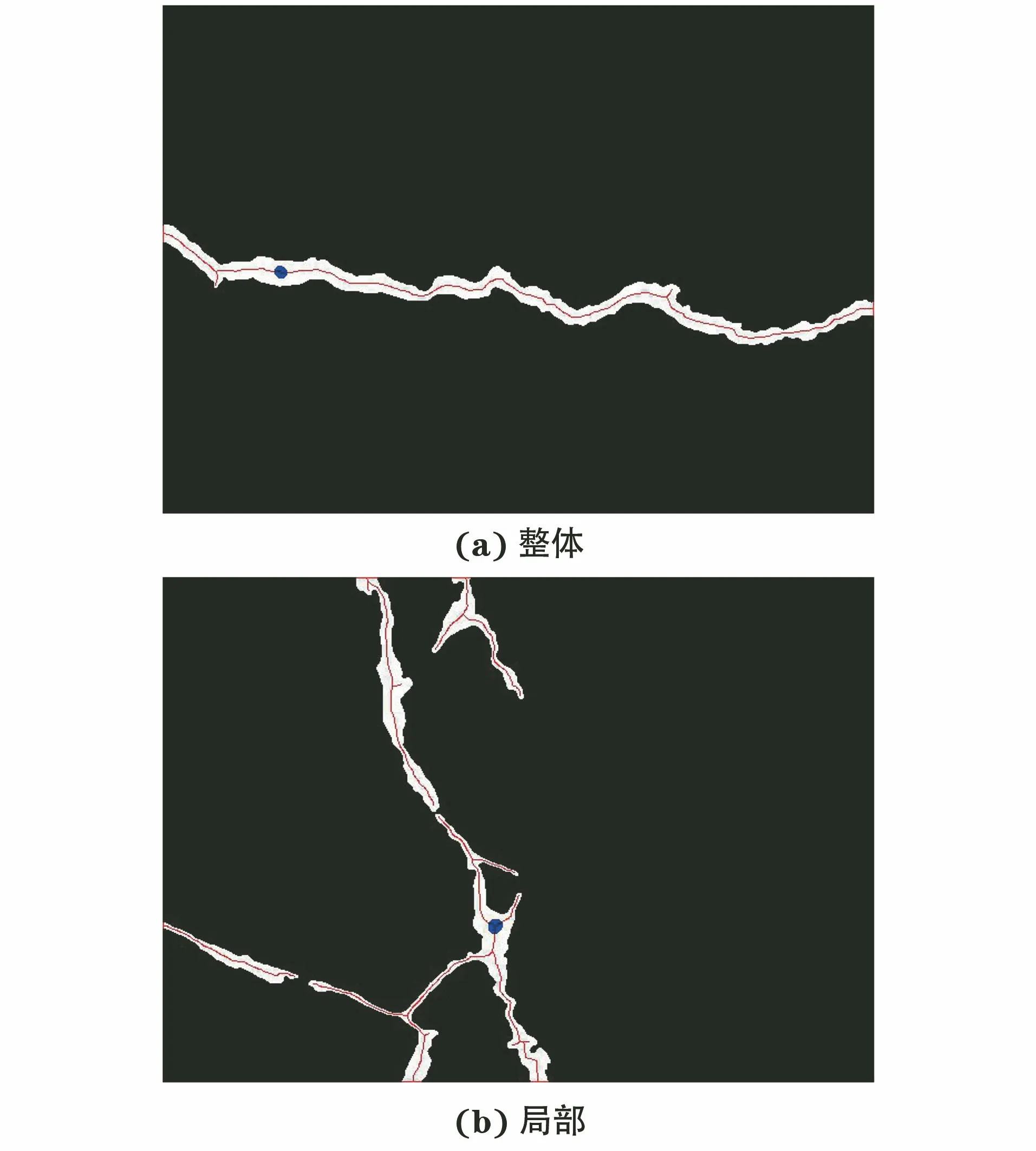
圖5 第二次骨架化得到的裂紋圖像
M(m1,m2,m3,…)=TN-TN-1
(5)
1.1.3 獲取裂紋最大寬度所在方向
獲取裂紋最大凸點集M(m1,m2,m3,…)后, 便可以得到裂紋最大寬度所在位置[mi為第i個凸點的坐標(xi,yi)]。利用最小二乘法對M擬合出一條切于TN的直線l1。最大凸點擬合及獲取最大寬度方向如圖6所示,取M上一點作l1的正交線l2,l2與裂紋邊緣的交點a,b即為最大寬度所在點,由這兩個點可以計算裂紋的寬度。

圖6 最大凸點擬合及獲取最大寬度方向示意
利用文章的方法分別對單分支裂紋和多分支裂紋進行寬度計算,將最大凸點擬合線的正交線與裂紋邊緣相交的線段用紅色直線標出,線段長度即為裂紋的最大像素寬度。裂紋像素最大寬度計算的效果圖如圖7所示。

圖7 裂紋像素最大寬度計算的效果圖
1.1.4 最大凸點集去噪
上述操作成功獲取到裂紋的最大像素寬度,但在對最大凸點集進行方向擬合時,會因為一些非連續點的存在,最終擬合精度受到影響。造成這種情況的原因是同一裂紋存在多個最大寬度處,即同一裂紋存在多個位置寬度相同且均為最大寬度。由于孤立點的存在會嚴重影響擬合后直線的方向,降低了最大寬度方向的準確性。文章采取了一種基于距離閾值的M點集濾波法,去除孤立點,得到點集P,再利用最小二乘法擬合出正確的切線。
距離濾波過程采用一個大小為3的核h(見圖8)與M進行卷積計算,在實際應用中利用M創建一個圖像掩膜,其中凸點位置像素值為1,其他點像素值為0,為了避免浪費算力,僅對像素值為1的像素進行卷積運算。卷積計算結果D可表示為
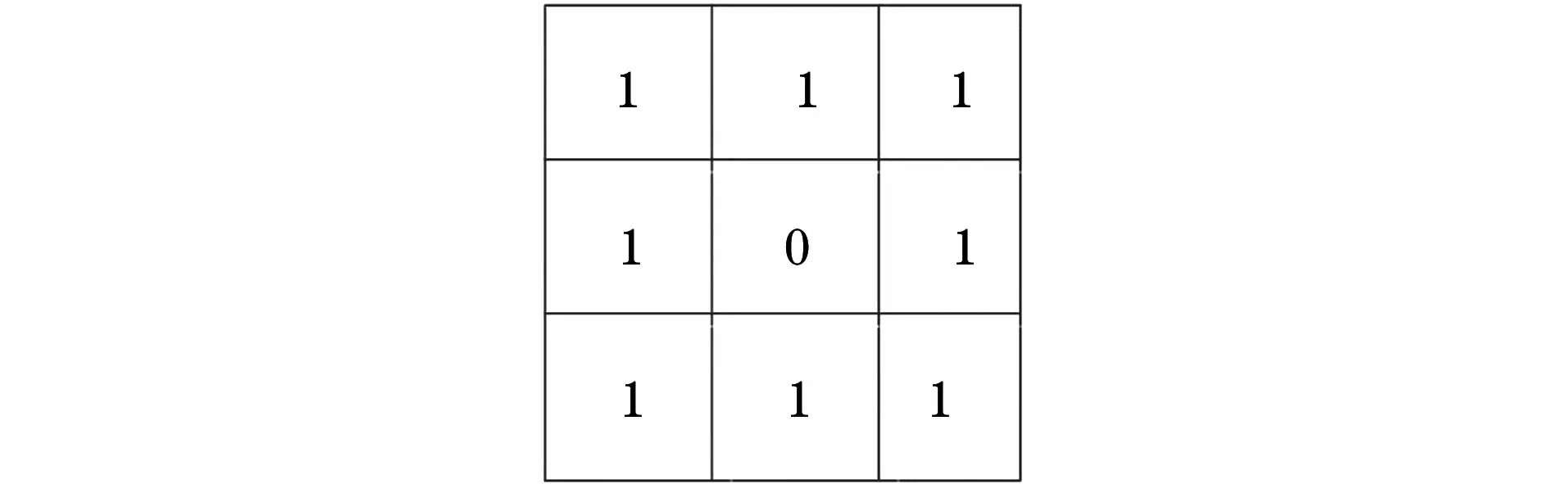
圖8 大小為3的卷積核h
D=h*M
(6)
對D進行閾值分割,得到濾波后的結果P,表示為

(7)
利用非連續點濾波法對圖5(a)中的裂紋進行寬度測量,濾波前后的效果如圖9所示,圖中綠線表示擬合最大寬度所在方向,藍色點為獲取的最大寬度點。由于裂紋最后產生的最大凸點集中像素點的數量較少,當存在一些偏差較大的點(孤立噪聲點)時,會對擬合結果產生非常顯著的影響,所以必須對最大凸點集進行去噪。
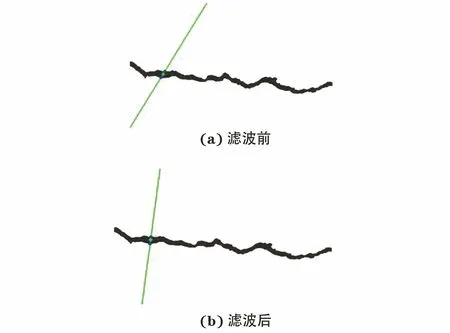
圖9 濾波前后裂紋寬度測量效果對比
1.2 裂紋實際寬度測量
為了得到相機世界坐標系與像素坐標系的關系,采用張正友雙目標定法對雙目相機進行標定[13]。標定使用的圖片對如圖10所示。

圖10 標定使用的圖片對
使用MATLAB軟件的雙目標定工具箱,利用上述圖片進行相機標記,得到相關的相機標定參數。其標定平均誤差低于0.35,標定誤差計算結果如圖11所示。
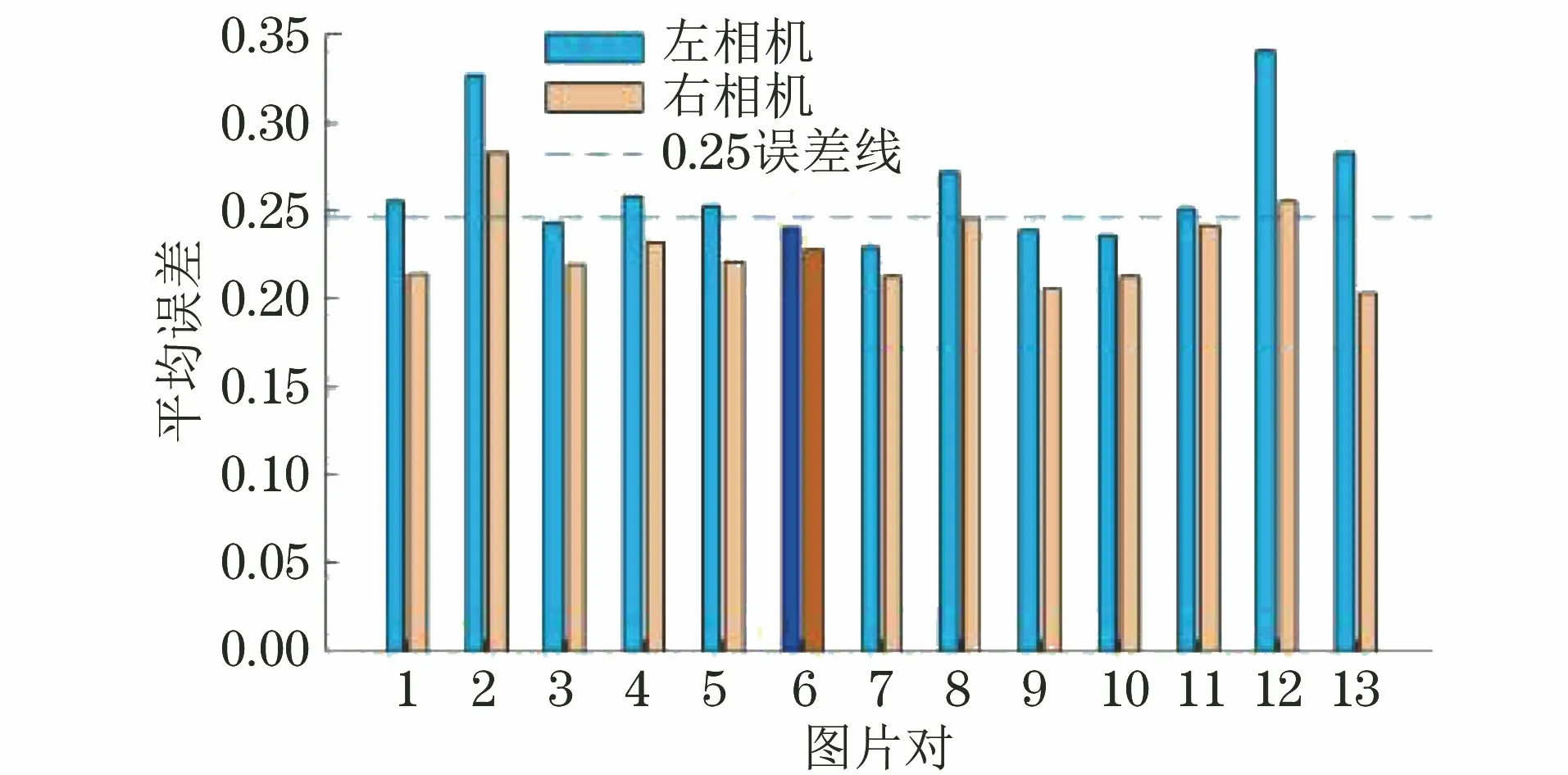
圖11 標定誤差計算結果
利用裂紋邊緣腐蝕的最大寬度計算算法,得到了左攝像頭中裂縫最大像素寬度對應的兩個像素點的坐標,為了進一步通過雙目攝像機還原裂紋實際的世界坐標,計算實際距離,通過對極限約束找到右相機上對應的最大像素寬度點所在的直線。與此同時,由于最大像素寬度點都在邊緣上,通過邊緣點匹配,便可以匹配到右相機上的最大寬度像素點,根據張正友雙目標定結果計算最后的真實世界坐標,并利用歐式距離公式得到最后的實際裂紋寬度。
2 實際最大寬度結果對比
為了驗證在計算裂紋像素寬度時,基于骨架的邊緣腐蝕算法提高檢測效率和檢測精度的效果,通過雙目相機拍攝200組裂紋圖片并測量出實際裂紋的最大寬度(其中橫向、縱向、斜向、網狀、塊狀裂紋各200張,圖片大小為1280 像素×960像素)。分別采用基于裂紋骨架的內切圓計算法[4](方法一)、基于K-means聚類劃分的像素寬度計算法[7](方法二)以及基于骨架的邊緣腐蝕算法(方法三,文章方法)計算出裂紋像素的最大寬度,并還原世界坐標計算裂紋的實際寬度。3種方法的檢測相對誤差如表1所示,平均運行時長如表2所示。

表1 3種方法的檢測相對誤差 %
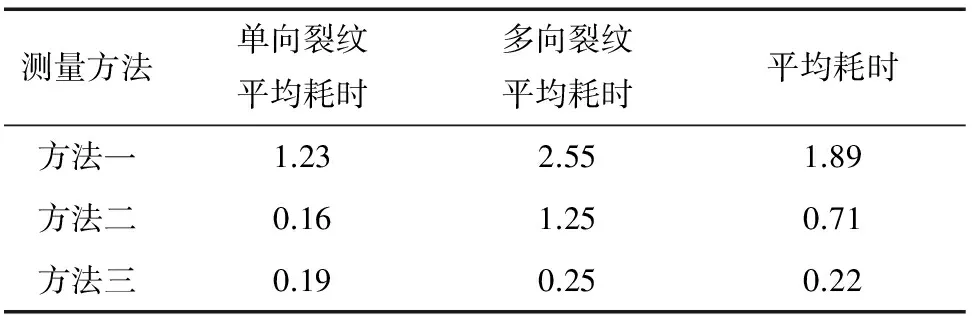
表2 3種方法的平均運行時長 s
由表中數據可知,方法一計算裂紋像素寬度時,多向裂紋和單向裂紋的檢測精度相差0.48%,該方法對裂紋形狀不敏感,整體平均誤差為9.03%,但由于基于骨架作為圓心進行內切圓繪制會消耗大量算力,所以算法耗時較長。方法二使用邊緣擬合法[3]計算單向裂紋像素的最大寬度,對于多向裂紋,則采用K-means聚類算法將裂紋劃分為多個單向裂紋,聚類過程耗時較長,且對多向裂紋進行聚類分割時會產生分割誤差,使得該方法在幾種方法中誤差最大。
文章采用的基于骨架的邊緣腐蝕算法平均相對誤差為4.1%,平均耗時為0.57 s。能夠在保證裂紋檢測精度的同時,快速計算出裂紋的實際最大寬度,其相比于方法一,精度提高4.93%;相比于方法二,速度提升了3.2倍。試驗結果表明,該算法極大地提高了裂紋檢測系統的檢測效率和精度,更加符合實際應用需求。
3 結語
文章提出了一種基于骨架的路面裂紋最大寬度的檢測算法。該方法主要有3個優點:① 結合裂紋骨架計算裂紋方向,避免了傳統方法難以識別復雜裂紋的問題;② 對最大凸點集進行濾波處理去除孤點,降低在極端情況下的誤差率;③ 利用雙目攝像頭獲取圖像,避免了傳統方法中復雜的標注過程,極大地提升了整個裂紋檢測系統的效率和準確率。文章所采用的拍攝裝置在進行戶外作業時仍然存在一定的難度,樹莓派作為邊緣設備,算力較低,很難實現實時檢測,現階段只能實現圖片采集和識別的分開處理。因此,如何提高整個系統的檢測速度將是接下來的研究重點。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:29:16
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
World Journal of Diabetes(2019年7期)2019-07-23 11:52:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
建筑材料學報(2014年3期)2014-03-11 17:08:02
