基于激光雷達的賽道識別系統研究與設計
2021-12-17 01:46:42張博雨畢棟代家喜程昊然
科技信息·學術版 2021年1期
張博雨 畢棟 代家喜 程昊然



摘要:針對激光雷達地面分割難以解決實時性、準確率兼顧的問題,設計了一種多線激光雷達的賽道識別系統。首先對原始點云使用直通濾波截取點云的感興趣區域提高后續模塊的處理效率,地面分割部分使用改進后的隨機一致性采樣(random sample consensus,RANSAC)算法剔除地面點云,最后使用歐式聚類并對其結果進行后處理。試驗結果表明:與傳統的RANSAC地面分割方法和歐式距離聚類相比,改進后的地面分割方法能夠更快速準確地將地面點剔除并達到實時性要求,歐式距離聚類后處理可將非錐桶障礙物剔除。
關鍵詞:隨機一致性采樣;激光雷達;錐桶檢測;歐式距離聚類
在中國大學生無人駕駛方程式大賽(FSAC)中激光雷達檢測周圍環境中的障礙物傳遞給下游任務完成指定賽道中的無人駕駛功能。本文中使用激光雷達設計并實現一種室外錐桶檢測算法,為了保證室外場景下數據處理的實時性和錐桶識別的準確率,該算法中使用一種改進后的RANSAC算法和聚類后處理算法。
1? 系統處理流程
1.1? 濾波
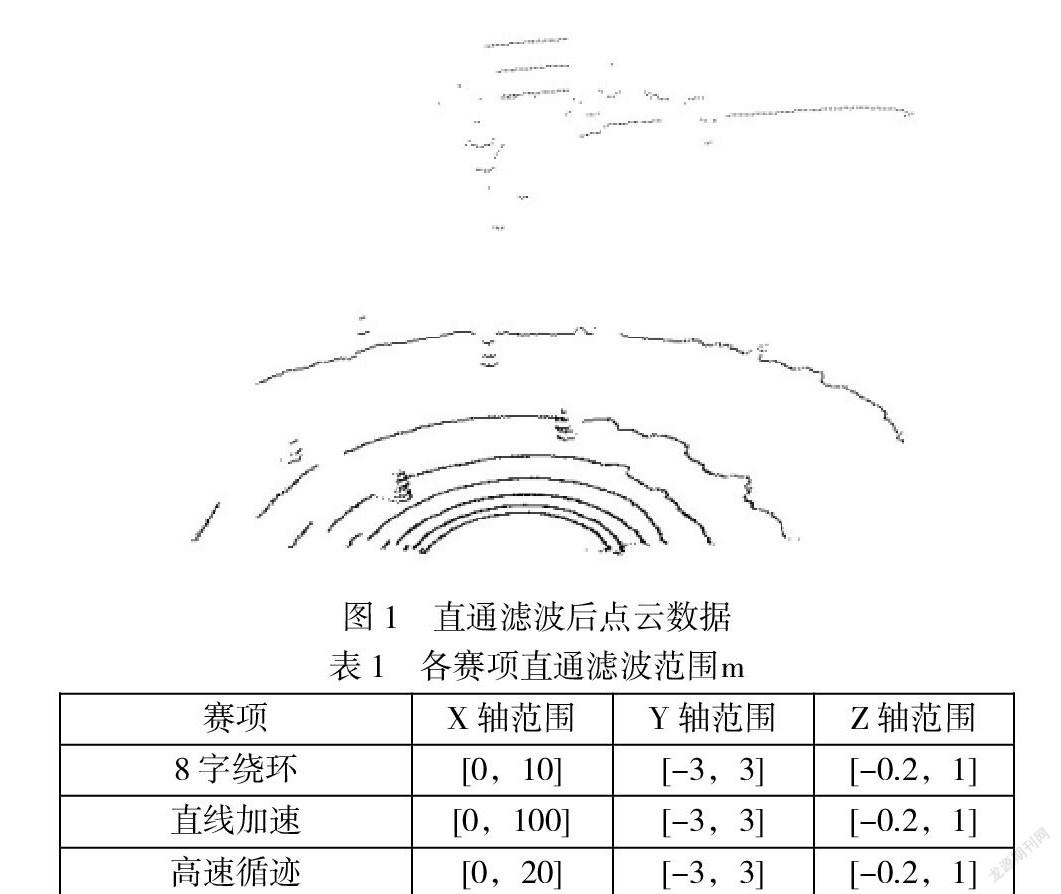
濾波在激光雷達的應用中是根據特定場合設定點云的有效范圍過濾掉無用的點云數據,保留點云的感興趣區域。設置點云的有效范圍可以提升后期地面分割與錐桶障礙物聚類的效率。
在FSAC中賽車需要完成八字環繞、直線加速、高速循跡等動態項目。在本文中,我們選擇了激光雷達點云庫(PCL)中的直接通濾波方法,對激光雷達掃描的點云數據的各個軸進行不同范圍的過濾。根據比賽經驗和賽道特點,當激光雷達安裝在離地面0.2米處時,每場比賽的過濾范圍如表1所示,直接過濾后的點云數據如圖1所示。
1.2? 改進后的RANSAC算法
改進算法的原理是利用激光雷達的安裝位置和地面高度快速找到真實的地平面,過濾掉不可能的多余點,從而找到一些與擬合平面I距離在閾值范圍內的點,即地面點,并將點數最多的點集作為地面剔除點集。點數最多的點集被用作平面擬合點集。這就避免了為那些不可能的地面點計算擬合平面。另外,賽場上真實地面的法向量應與激光雷達安裝位置的Z軸基本平行。
式中:P為點(X,Y,Z)到所擬合的平面的距離;(P,P,P)為所找最佳平面的法向量,P為模型局內地面點集;D為局外點到擬合平面I的距離閾值。通過模型得到3點擬合平面I后,將符合閾值范圍內的局外點加入地面點集P中。
由于擬合平面I的點與真實地面點接近,可以減少處理點云數據時的迭代次數,提高計算效率,得到地面剔除后的點云數據,如圖2所示。
1.3? 歐式距離聚類算法及后處理
在FSAC賽場中唯一的障礙物是錐桶,在直通濾波后緊接著使用改進后的RANSAC算法去除地面,以減少點云。錐桶的點云具有密集的分布,可以用歐氏距離聚類算法進行聚類。障礙物被組合成包含錐桶和非錐桶障礙物的集群,然后使用下面描述的聚類后處理立即丟棄非錐桶障礙物。
FSAC賽道上的圓錐桶有一定的尺寸:小桶長寬20厘米,高30厘米;大桶長寬35厘米,高70厘米。聚類結果根據錐桶的大小進行處理,只保留有效的錐桶聚類。
獲得每個集群點云中三個軸的最大值和最小值,這相當于用一個外圍的邊界盒來包圍錐桶障礙物。計算每個聚類點云中各軸的最大值和最小值之間的距離,并寫成X,Y和Z,以確定該距離是否與錐桶的大小相對應,以決定是否保留該聚類。
因為激光雷達掃描的錐形桶不一定是正面的,再加上點云掃描時的一些噪聲。所以、軸距離閾值設置為X和Y。
2? 試驗
試驗在8字繞環上錄制了500個PCD點云數據,直線加速上錄制了322個PCD點云數據。隨機取193個用于測試,模擬8字繞環賽道如圖4所示。
圖5中顯示了優化前后RANSAC算法的IoU交并比(Intersection over Union)準確率,通過對193個PCD文件計算出的IoU(公式5)取平均得到優化前RANSAC算法mIoU為88.27%,優化后RANSAC算法mIoU為91.31%。
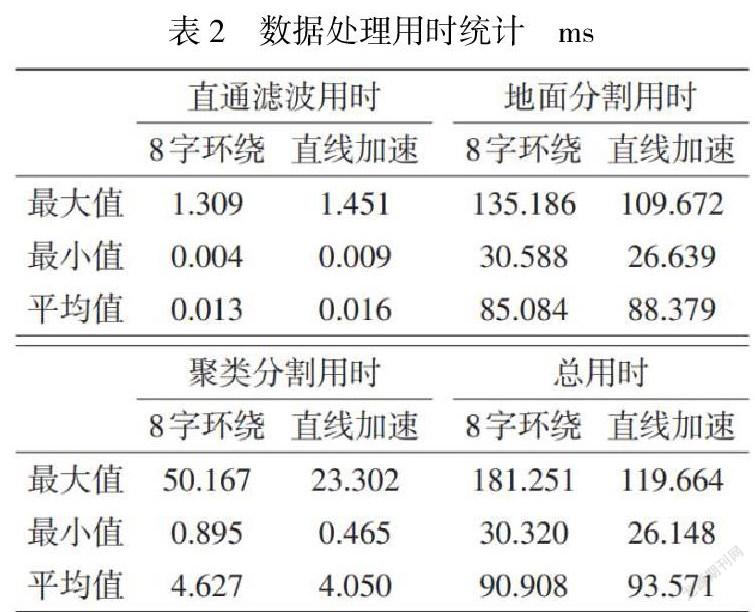
為了測試整個數據處理流程是否滿足實時性要求,對點云預處理、優化后地面分割以及聚類分別進行用時統計,如表2所示。
通過表2可以看出,地面分割算法對比于其他算法平均計算時間最長(85.083510 ms),對于使用激光雷達檢測錐桶障礙物來說可以滿足實時性要求。
3? 結論
本文設計了一個基于激光雷達的軌道識別系統,并優化了RANSAC的地面剔除算法。實驗結果表明,該軌道識別系統可以滿足實時性要求,并可以為賽車避障的后續處理節省時間。
參考文獻:
[1]楊洋,張永生,馬一薇,等.基于掃描線的車載激光雷達點云濾波方法[J].測繪科學技術學報,2010,27(3):209-212.
[2]許志勇,嚴尉劍.基于激光雷達點云的濾波算法研究[J].信息通信,2018,31(2):80-82.
[3]張振華.基于激光點云數據的障礙物檢測算法研究[D].濟南:山東大學,2020:51-53.
基金項目:大學生創新創業訓練計劃項目:DC2021110
作者信息:張博雨,男,2000.10.28,河北滄州,湖北汽車工業學院本科生。
