基于虛擬引力約束的光纖傳感器網絡節點空洞智能修復算法研究
2021-12-15 00:49:24宋亞磊
傳感技術學報 2021年10期
關鍵詞:區域
宋亞磊
(鄭州商學院現代教育技術中心,河南 鞏義451200)
光纖傳輸傳感網絡是一種以信息感知、處理和傳輸為一體的大規模隨機分布的傳感節點,在橋梁、大壩、油田等城市建設中均有應用,考慮到大多數光纖傳輸傳感網絡都是由靜態或動態的傳感器節點組成,能夠實時地獲取各個監測目標的信息,并將采集到的全部信息通過通信設備發送至系統服務器。但是在應用過程中極易出現能量消耗或其他原因,導致出現未被光纖傳感節點覆蓋的監測區域,即“覆蓋空洞”[1-2]。覆蓋問題在光纖傳輸傳感網絡中一直廣泛受到各界學者的關注,其中主要包括節能問題、連通性問題等。未來階段,將重點研究如何促使服務器內各個節點至少獲取一個傳感器節點的監控。
于春榮等人[3]為了實現物聯網中任意節點的快速定位,設計基于光纖傳感的快速定位技術,實驗結果表明該方法定位精度與節點數量密切相關,該方法應用效果較好,但是存在耗時較長問題。金保林等人[4]提出一種基于蟻群優化算法的壞死節點躲避路由算法,在考慮鏈路中多種因素的影響下,選取數據傳輸的最優路徑。該方法耗時指標較為理想,但是其實現過程復雜度較高,不適宜廣泛應用。李煒等人[5]通過調度光纖應變網絡節點位置關系,提高覆蓋質量,最終完成光纖應變傳感器節點高效覆蓋,該方法實現過程較為簡單,但是應用效果不理想。Zy A等人[6]利用矢量量化方法,找出協作通信中的主動節點,研究了整個網絡的性能參數。首先對節點位置進行了數學分析,并根據節點的傳感輸出進行能量檢測。仿真結果與理論方法和仿真方法進行了比較。該方法有效地解決了傳統無線傳感器網絡的功耗分析問題,但是存在數學分析容易出錯的問題。Harizan S[7]針對調度問題提出了一種改進的NSGA-II算法。考慮了傳感器節點的覆蓋率、連通性和剩余能量等多個參數,該算法應用效果較好,但是存在耗時較長的問題。
針對傳統光纖傳感器網絡節點空洞修復方法存在的問題,本文提出基于虛擬引力約束的光纖傳感器網絡節點空洞修復算法,以期能夠快速、準確完成絡節點空洞修復。
1 基于虛擬引力約束的光纖傳感器網絡節點空洞修復算法
1.1 基于IVFA-B算法的虛擬引力模型
隨著光纖傳輸傳感網絡綜合性能的不斷提升。光纖傳感技術不僅能夠實時進行數據采集,同時也能夠進行數據處理,同時還能夠有效向用戶反映真實的數據變化情況。將低成本和低能耗的傳感器節點任意分布在設定的監測區域內,利用圖1給出光纖傳感器網絡結構示意圖。
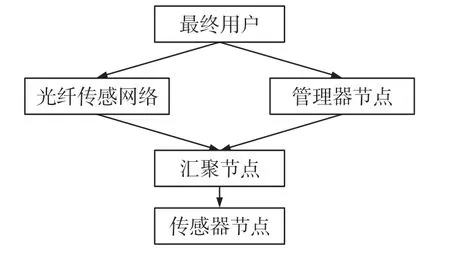
圖1 光纖傳感器網絡結構的具體示意圖
通過分析圖1可知,光纖傳感器網絡主要包含以下三種不同的節點,分別為:①管理節點;②匯聚節點;③傳感器節點。其中,在監測區域分布最為廣泛的就是傳感器節點,同時也被稱為感知節點;在整個網絡中只含有一個管理節點,通過管理節點實現全部節點的管理;匯聚節點在整個網絡中主要承擔數據采集以及數據管理工作。
現階段的覆蓋問題能夠劃分為很多種,其中包含多種不同的分類方法,具體分類如圖2所示:
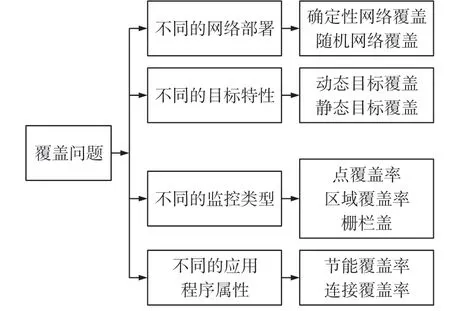
圖2 光纖傳感器網絡覆蓋問題分類
傳感器節點在監測區域內移動的過程中會受到虛擬力的影響,虛擬力可能是兩種不同的力,分別為:①吸引力;②排斥力。
通過上述不同的作用力能夠有效計算節點之間的最佳部署距離[8]。
其中虛擬力的模型能夠表示為式(1):
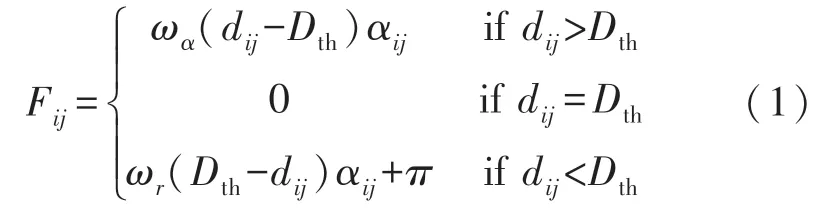
式中,dij代表不同節點之間的歐式距離;αij代表不同節點之間的方向角;ωα代表虛擬引力;ωr代表斥力參數;Dth代表網絡設定的距離閾值[9-10]。
在具體的操作過程中,光纖傳感器網絡需要滿足以下的約束條件:①在算法的初始計算過程中,傳感器節點會被隨機分布在監測區域內,同時各個節點的性能是一樣的。②各個節點中都含有移動執行器,移動執行器能夠保證節點在移動區域內任意移動。其中各個節點都含有相同的初始能量,同時節點在移動過程中還會消耗一定的能量[11]。③傳感器節點利用GPS或者其他定位算法獲取節點自身的坐標信息,同時也能夠獲取鄰近節點之間的距離關系。
其中各個節點之間的作用力計算如式(2):
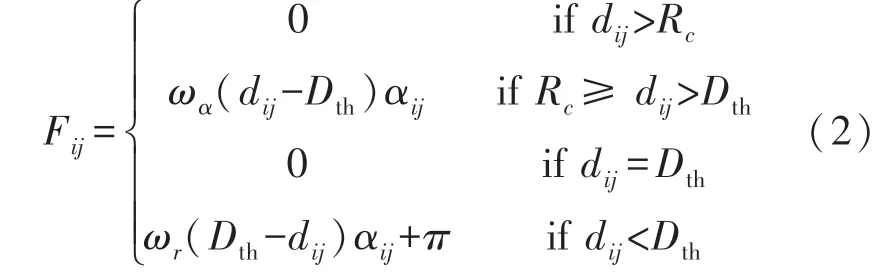
式中,Rc代表節點的通信半徑。
被選用模型主要在經典虛擬力模型中添加了以下幾方面的條件,具體如下所示:①當節點距離高于通信半徑時[12-13],需要將虛擬力的取值設定為0,使其滿足現階段的發展需求。②網絡中的節點由于受到不同力的影響,會使其移動出監測區域內,形成無用的節點。
在上述分析的基礎上,在所提算法中加入區域邊界對節點的斥力作用,確保監測區域內的節點不會隨意移動[14]。假設節點之間不存在斥力作用,則有式(3):

式中,dib代表節點和區域邊界之間的距離;ωb代表邊界斥力參數;Dth-b代表節點和區域邊界之間的距離閾值。
式中,

通常情況下,監測區域是一個四邊形,因此節點會受到各個區域邊界的作用力,其中x1、x2、y1、y2分別代表不同的方向。
在此基礎上可以得到傳感器節點受到的虛擬力合力為式(5):

式中,k代表鄰近節點的數量[15-16]。
結合上述分析可知,節點的移動距離是需要通過相關的計算式獲取的,則有:
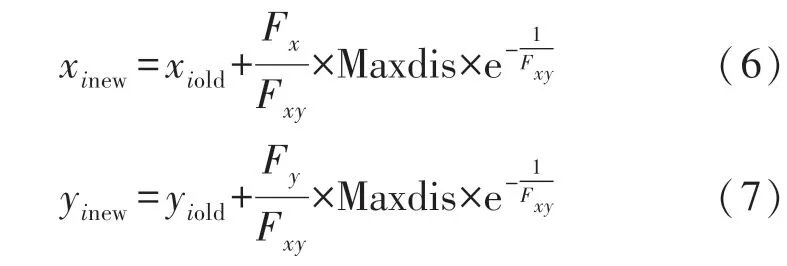
式中,xiold代表節點移動之前的位置;Fx代表傳感器在x方向上的投影;Fy代表傳感器在y方向上的投影;Fxy代表增加在傳感器上的合力[17];Maxdis代表節點的單位最大移動距離。
以下需要對節點si進行受力分析,其中排斥力的計算式為:

其中吸引力的計算式為:

在A×B監測區域內,忽略相關的參數,則能夠獲取以下的計算式:

當節點si受力平衡,且達到穩定的狀態,則有:

由于區域邊界對節點的排斥力是一致的,則:

模擬經典的虛擬力模型,通過模擬結果得到對應的距離閾值[18-19],根據距離閾值實時調節傳感器節點之間的作用力屬性。
通過節點的密集程度能夠詳細描述節點在監測區域內的分布情況,具體的計算式如下所示:
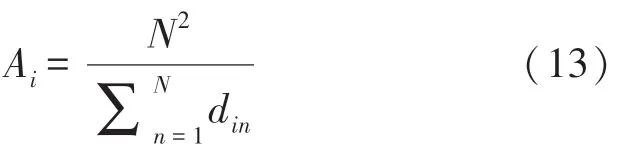
式中,N代表節點的鄰居節點數量;din代表節點到鄰居節點之間的歐式距離。
利用圖3給出不同距離的閾值分析圖[20],當覆蓋率a<1時,則說明節點沒有完全覆蓋整個監測區域內,其中距離閾值的計算式(14)為:


圖3 距離閾值分析結構圖
當監測區域內的覆蓋率a≥1時,則說明整個監測區域中存在覆蓋空洞,得到距離閾值的公式如式(15)所示:

2.2 基于虛擬引力約束的光纖傳感器網絡節點空洞修復算法
利用圖4給出相鄰三個節點組成的正三角形[21-22],圖4(a)代表在相同結構傳感器網絡中全部節點的詳細覆蓋情況;圖4(b)是圖4(a)三個圓心圍成的正三角形的基礎上,三個交點相交形成最大的覆蓋面積[23-24]。
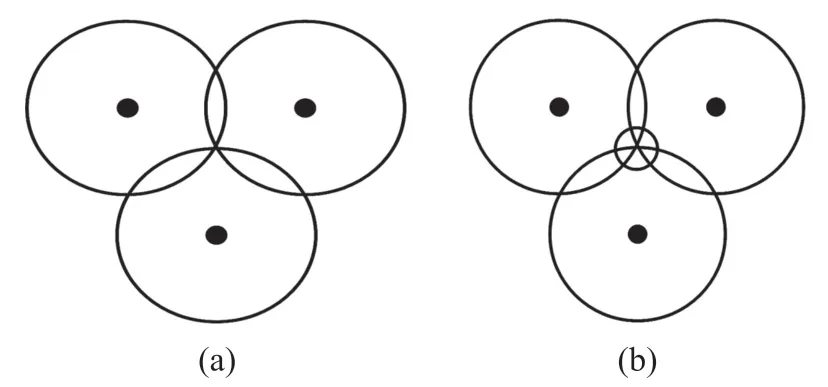
圖4 相鄰三個節點組成的正三角形
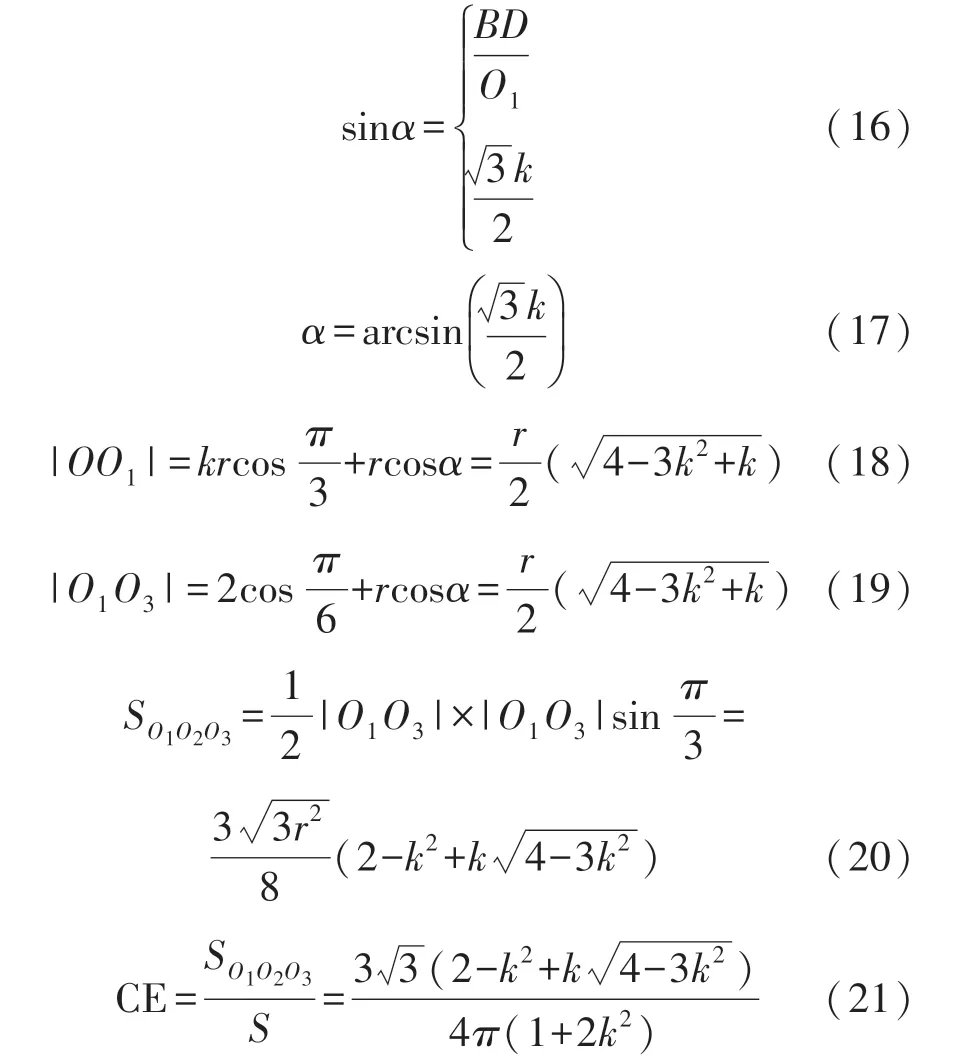
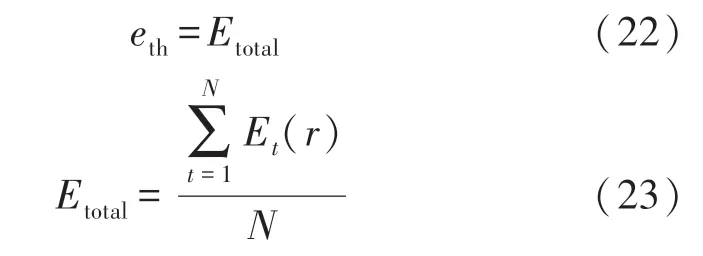
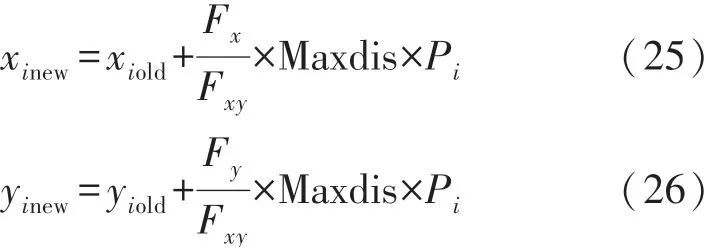
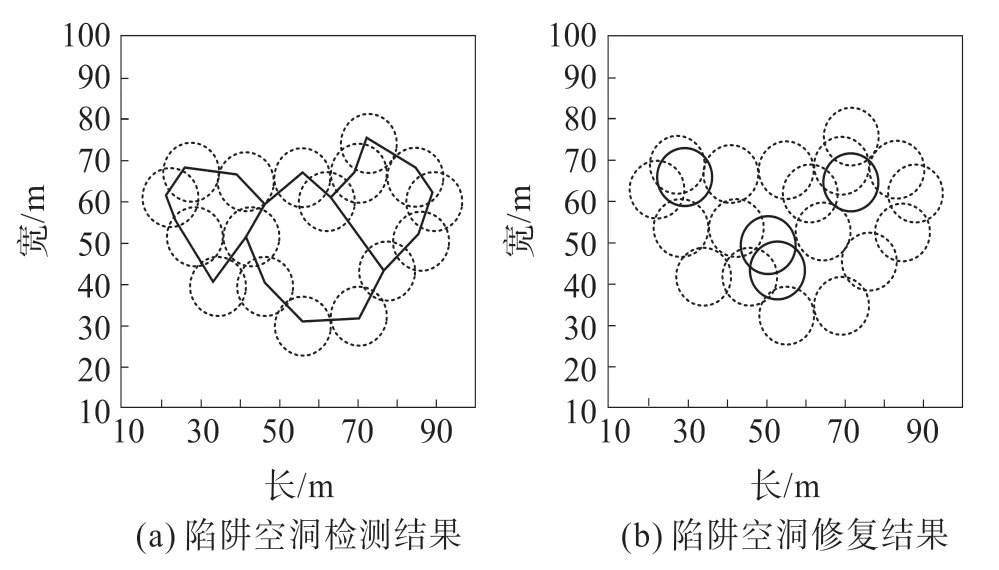
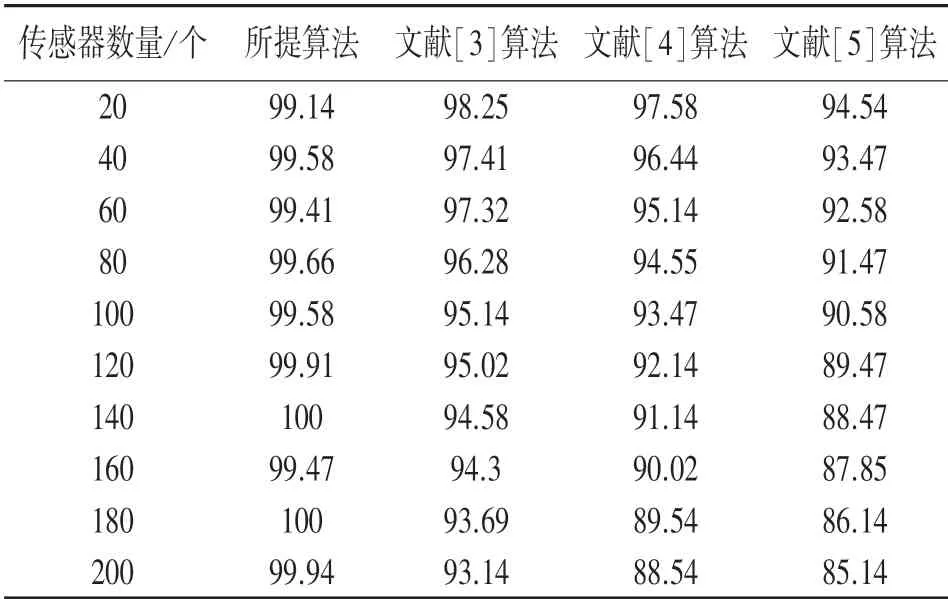
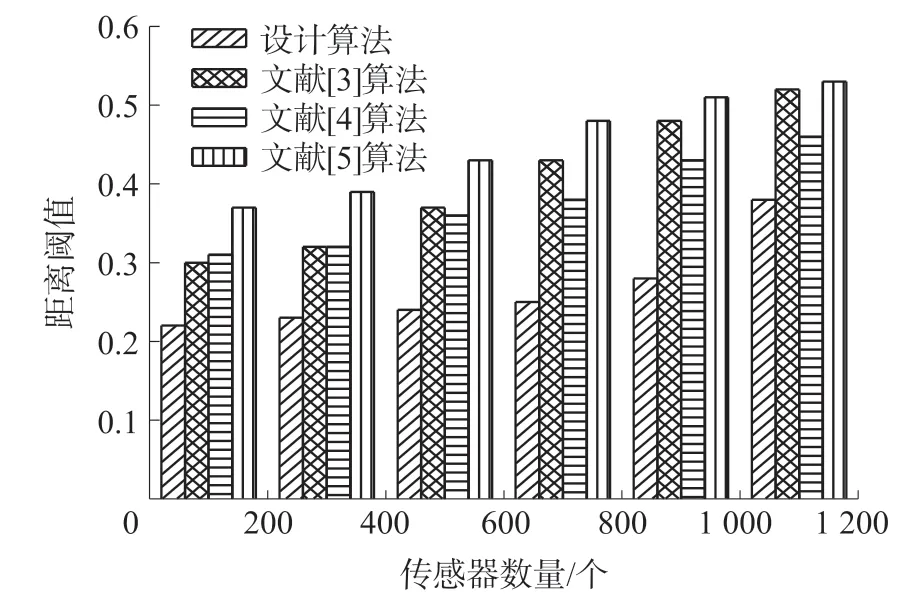
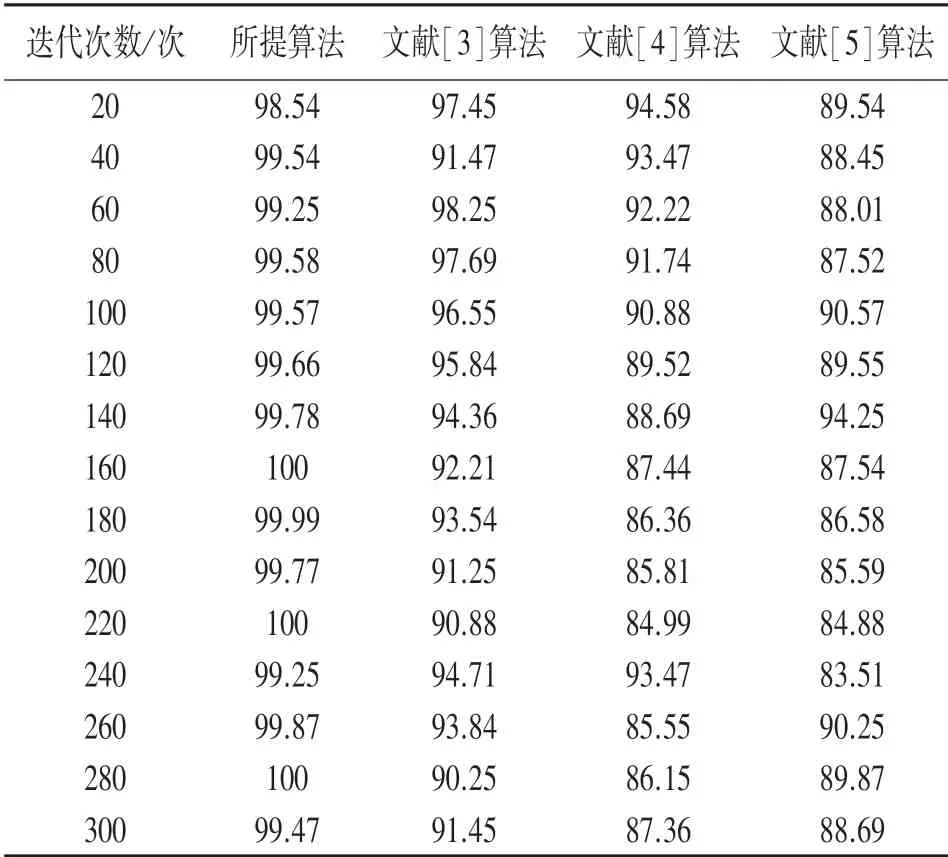
分析圖5可知,假設其中任意一個節點的感知半徑為R1,另外一個節點的感知半徑為R2,R1>R2,則設定R1=r,R2=kr,0 圖5 傳感器節點分析圖 在三角形中,能夠獲取以下的計算式: 式中,節點的能量閾值[25]計算式為: 傳感器節點在移動的過程中,由于節點的能量不同導致節點移動的概率也存在一定的差異,以下給出具體的計算式: 式中,節點移動距離的計算公式為: 將上述過程中得到的節點最佳距離和對應的最佳距離閾值相結合,計算傳感器網絡的適用度,并且將節點的移動概率引入到對應的計算式中,實現光纖傳感器網絡節點空洞修復。 考慮到光纖傳感器網絡節點空洞修復的復雜性,不同方法修復的有效性主要通過MATLAB仿真軟件進行,因此本文搭建的仿真平臺為:Intel(R)Core(TM)i3,主 頻3.7 GHz,內 存4.0 GHz,Windows10.0操作系統,并采用Visual C++軟件編程。并將引言中提到的文獻[3]DSN中基于虛擬部隊的節點部署和目標定位方案、文獻[4]基于光纖傳感的物聯網節點定位技術研究以及文獻[5]中性光纖通信網絡中壞死路由算法的設計,作為對比方法進行對比驗證。 首先需要明確的是,仿真過程中為了排除偶然性因素的影響,使結論更具有普遍意義,需要設置重復組求其平均值,下述仿真過程中涉及的測試結果均為50次測試的平均值,具體測試過程如下:①在100 m×100 m的光纖傳感器網絡監測區域內部隨機部署若干個感知半徑為R的傳感器節點;②設置通信半徑為10 m,陷阱空洞直徑閾值為20 m,輸入至MATLAB仿真軟件中生成如圖6所示的陷阱空洞檢測與修復仿真示例。③測試四種算法的感知半徑,距離閾值以及節點能量閾值變化情況。 圖6 修復仿真示例 3.2.1 不同算法的感知半徑對比 以下給出四種算法在傳感器數量不斷發生變化的情況下,各個修復算法的感知半徑對比情況如表1所示。 綜合分析表1的數據可知,不同算法的感知半徑會隨著傳感器數量的變化而變化,其中所提算法的感知半徑在四種方法中為最高,表明所提方法能夠更好地完成光纖傳感器網絡節點空洞修復。 表1 四種算法的感知半徑變化情況 3.2.2 距離閾值 以下分別給出四種算法的距離閾值變化情況,具體如圖7所示。 分析圖7可知,傳感器數量與距離閾值存在密切相關關系,其中基于虛擬引力約束的光纖傳感器網絡節點空洞智能修復算法的距離閾值相比其他三種方法有了較為明顯的下降,這說明所提能夠具有較高的運行效率。 圖7 不同算法的距離閾值對比結果 3.2.3 節點能量閾值 以下分別對比四種光纖傳感器網絡節點空洞修復算法的能量閾值,具體的對比結果如表2所示。 表2 不同算法的節點能量閾值變化情況 分析上述實驗數據可知,本論文所設計的算法能量閾值在四種算法中為最高,說明研究的實際應用效果最優,相比較傳統方法,所提算法具有更多優勢。 針對傳統的光纖傳感器網絡節點空洞修復算法存在感知半徑較低、距離閾值較長等問題,本文設計并提出基于虛擬引力約束的光纖傳感器網絡節點空洞修復算法。在綜合分析設計的基礎上通過實驗進行驗證,實驗結果表明本文設計方法具有一定有效性以及適用性。 未來階段,將重點針對以下幾方面展開研究:①本文在計算的過程中是不存在障礙物的,在實際應用的過程中會存在障礙物,造成網絡性能的下降,如何在有障礙物的情況下提升算法的覆蓋能力成為下一階段研究的重點內容。②未來階段在擴大研究范圍,如何在三維空間中得到最佳的部署,也是未來階段研究的熱點話題。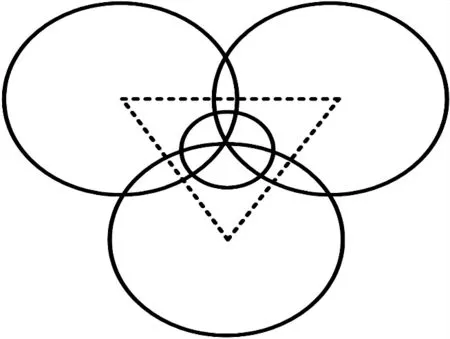

3 仿真分析與結果
3.1 仿真設置
3.2 仿真測試結果
4 結束語
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15