基于錨節(jié)點分布特性的跳距修正的DV-HOP定位算法?
2021-12-15 00:48:08李躍飛
傳感技術學報 2021年10期
關鍵詞:環(huán)境
李躍飛
(湖南信息學院計算機科學與工程學院,湖南 長沙410014)
隨著電子技術的發(fā)展,無線傳感網絡(Wireless Sensor Networks,WSNs)已在康復醫(yī)療、工業(yè)監(jiān)測等領域廣泛使用。WSNs中的節(jié)點先感測環(huán)境數(shù)據(jù),再將數(shù)據(jù)傳輸匯聚節(jié)點,進而實現(xiàn)對環(huán)境的監(jiān)測目的。具有準確位置信息的感測數(shù)據(jù)才具有意義。因此,定位成為WSNs領域的一個研究熱點之一[1-2]。
盡管全球定位系統(tǒng)(Global Position System,GPS)[3]定位技術很成熟,但是將WSNs中所有傳感節(jié)點配備GPS,成本太高,而且節(jié)點運行GPS增加了節(jié)點的能量消耗。對于微型的、能量有限的節(jié)點而言,高的能量消耗是無法接受的。
因此,通常在網絡內只允許部分節(jié)點配置GPS,使這些節(jié)點能夠獲取自己的位置,常將它們稱為參考節(jié)點或錨節(jié)點。現(xiàn)存的定位算法可分為測距定位和非測距定位算法。如基于接收信號強度指標(Receiver Signal Strength Indicator,RSSI)、到達角度和到達時間差(Time Difference of Arrival,TDOA)[4]屬基于測距定位算法。相比于非測距定位算法,測距定位算法需一些硬件設備,增加了定位算法的成本以及開銷。
據(jù)此,非測距定位算法,如質心定位[5]、DVHOP[6]在WSNs中廣泛應用。這些非測距定位算法利用跳數(shù)等連通信息估計節(jié)點位置。目前,研究人員對非測距定位算法進行了深入研究,并得到較滿意的定位精度[7-8]。然而,這些算法是基于同構的節(jié)點網絡。在實際環(huán)境場景中,節(jié)點間的通信區(qū)域是不規(guī)則的,并且受障礙物影響,容易形成異構網絡,這就影響了定位性能。此外,隨機部署節(jié)點無法保證錨節(jié)點在網絡內的分布的均勻性。這直接影響節(jié)點的定位精度。
為此,本文考慮到實際環(huán)境,正視錨節(jié)點分布的均勻性問題,提出對跳距修正的DV-HOP定位算法HDCD。HDCD算法利用全局錨節(jié)點信息以及局部信息對跳距進行修正,減少測距誤差。在不同拓撲結構下分析HDCD算法的定位性能。性能分析表明,提出的HDCD算法提高了定位精度,增強了對錨節(jié)點分布不均勻的惡劣環(huán)境的強健性。
1 系統(tǒng)模型
N個傳感節(jié)點隨機分布于二維(2-D)網絡區(qū)域?×?,如圖1所示,其中錨節(jié)點占比為p%,未知節(jié)點占比為(100-p)%。令αi表示第i個錨節(jié)點,其位置坐標為;令sj表示第j個未知節(jié)點,其位置坐標為(xj,yj)。
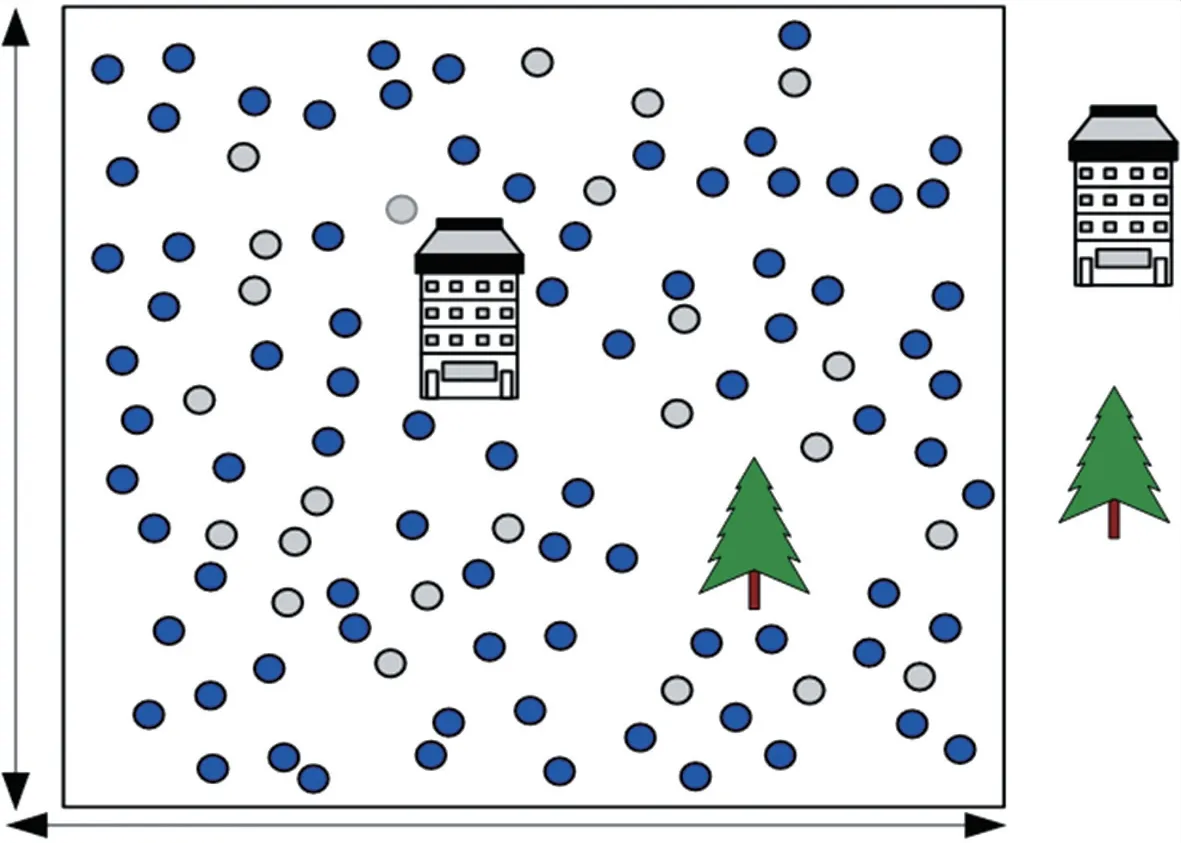
圖1 網絡模型
假定所有節(jié)點具有相同的通信半徑Rt。每個節(jié)點在其通信范圍內能夠與它的鄰居節(jié)點進行直接通信。錨節(jié)點利用GPS獲取其自身的位置。
與傳統(tǒng)的定位算法不同,本文假定區(qū)域內存在障礙物,如建筑物、樹。這些障礙物影響節(jié)點間信號的傳輸,增加跳距估計的誤差。此外,考慮錨節(jié)點分布不均勻性對定位精度的影響。本文針對上述問題,對平均跳距進行修正,進而提高定位精度。
2 HDCD定位算法
傳統(tǒng)的DV-HOP算法并沒有考慮到錨節(jié)點分布是否均勻問題。然而,在實際環(huán)境中,錨節(jié)點分布是不均勻的。換而言之,傳統(tǒng)的DV-HOP算法嚴重依賴于錨節(jié)點的分布。針對此問題,HDCD算法對未知節(jié)點與錨節(jié)點間的距離進行修正。
2.1 錨節(jié)點的全局跳距修正
首先,依據(jù)傳統(tǒng)DV-HOP算法[9]的策略,計算未知節(jié)點與錨節(jié)點間的最小跳數(shù)。具體過程如圖2所示。錨節(jié)點廣播beacon包,其包含其位置以及該beacon包被傳輸?shù)奶鴶?shù)Nh,最初Nh=0。
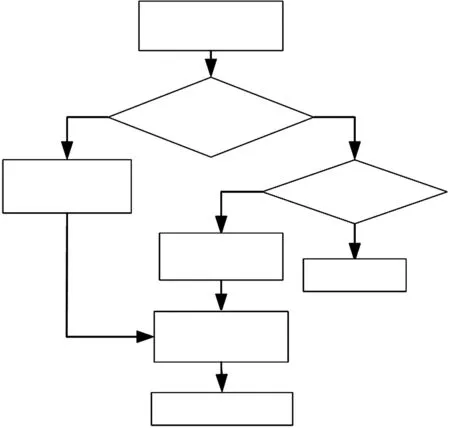
圖2 beacon包的處理流程
一旦收到beacon包,節(jié)點就判斷是否之前已接收過此包。若是第一次接收,就從beacon包中提取發(fā)送節(jié)點的位置以及跳數(shù)信息。并更新beacon包中跳數(shù)值(Nh+1),再轉播。若之前已接收過此beacon,就將目前所接收的beacon包跳數(shù)值與之前存儲的跳數(shù)值進行比較,并且保存兩者中的最小值。
然后,錨節(jié)點就依據(jù)式(1)計算平均跳距:

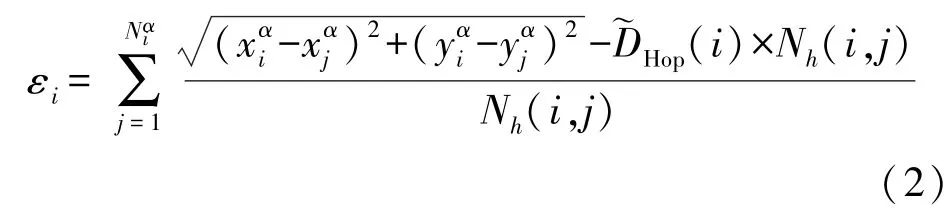
傳統(tǒng)的DV-HOP算法是利用式(1)計算錨節(jié)點的平均跳距。這存在較大誤差,其并沒有充分利用錨節(jié)點的已知信息計算平均跳距的誤差。為此,HDCD算法利用錨節(jié)點的已知信息,計算式(1)所計算的平均跳距的誤差。式中:εi表示錨節(jié)點αi端所計算的平均跳距的誤差。
因此,利用該誤差εi對(i)進行修正,如式(3)所示:

2.2 錨節(jié)點的局部跳距修正
由于節(jié)點是隨機分布于監(jiān)測區(qū)域,網絡拓撲結構的不規(guī)則概率較大。因此,僅從全局拓撲結構修正跳距是不準確的。為此,HDCD算法也從局部拓撲結構對跳距進行修正。

式中:M表示估計一個未知節(jié)點位置至少需要的錨節(jié)點數(shù);m=p%×N表示網絡內的錨節(jié)點數(shù);?×?表示監(jiān)測的區(qū)域面積。
錨節(jié)點將其獲取的離其他錨節(jié)點的跳數(shù)值進行比較,計算在小于跳數(shù)范圍內的單跳平均跳距。
不失一般性,平均每跳的誤差服從高斯分布。利用參數(shù)估計理論,通過估計誤差建立代價函數(shù),再依據(jù)最小均方誤差準則獲取平均跳距[11]。具體過程如下。
構建代價函數(shù),如式(6)所示:
2.3 未知節(jié)點離錨節(jié)點的距離估計
在真實環(huán)境中,兩節(jié)點間的真實距離與其估計的距離差值并不相同。有些差值小,有些差值大。而依據(jù)式(1)可知,平均跳距與兩節(jié)點間的歐式距離成正比,與它們間中跳數(shù)成反比。
如圖3所示,圖3中有兩個錨節(jié)點(αr、αq)。利用它們間的歐式距離以及它們間的跳數(shù)值計算平均跳距。通常,所估計的距離總是小于它們間的真實距離,如圖3(a)所示。在這種情況下,通過修正它們的平均跳距,降低定位誤差,提高定位精度。
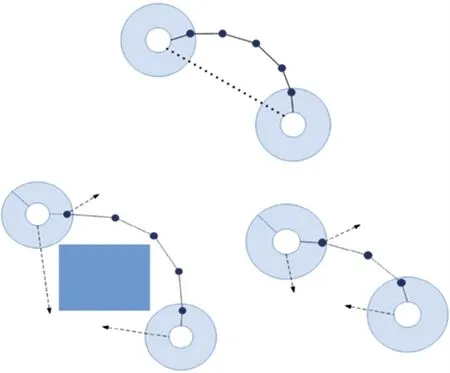
圖3 三類情況分析
當存在障礙物時,錨節(jié)點間的跳數(shù)越大,且所估計的它們間距離小于它們真實的距離,如圖3(b)所示。在這種情況下,它們的平均跳距偏小,也需要對它們的平均跳進行修正。
第三種情況:當錨節(jié)點間跳數(shù)較少,所估計的距離與實際距離偏差較小。如圖3(c)所示。在這種情況下,平均跳距對定位精度影響偏小。
依據(jù)上述分析的三種情況可知,并結合2.1節(jié)和2.2節(jié),未知節(jié)點利用式(8)估計距離:
2.4 基于最小二乘法的位置估計
未知節(jié)點利用式(8)獲取離錨節(jié)點間的距離,即測距。假定未知節(jié)點sj獲取了離κ個錨節(jié)點的距離,令αj,1,αj,2,…,αj,k,…αj,κ表示這些錨節(jié)點。未知節(jié)點sj所測量的離這個κ個錨節(jié)點的距離分別表示為
有κ個錨節(jié)點就能構建κ個等式。參照式(10),第κ個等式為:
3 性能分析
利用MATLAB R2016a軟件建立仿真平臺,分析HDCD算法的性能。由于本文旨在分析錨節(jié)點的分布均勻性對定位精度的影響,建立四個不同拓撲結構的網絡,它們的各項參數(shù)值如表1所示。
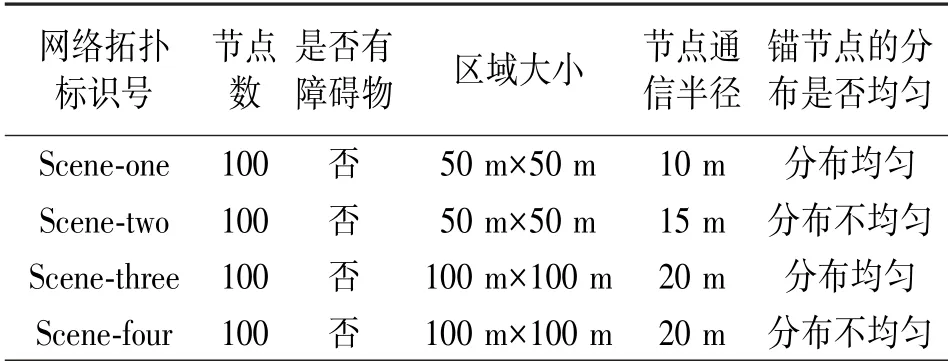
表1 四種網絡拓撲結構的參數(shù)值
選用通信半徑歸一化后的平均定位誤差作為性能指標,其定義如式(18)所示:
此外,選擇同類的DV-HOP定位算法為參照,對比分析在四種不同拓撲結構下它們的定位誤差性能。考慮到隨機誤差,每種拓撲結構下,獨立重復100次,取平均值作為最終的仿真數(shù)據(jù)。
3.1 Scene-one環(huán)境下的定位性能
圖4給出Scene-one環(huán)境下的拓撲結構示例,其中未知節(jié)點數(shù)為100,錨節(jié)點數(shù)為8,錨節(jié)點分布均勻。從圖4可知,8個錨節(jié)點較均勻地分布在監(jiān)測區(qū)域內。
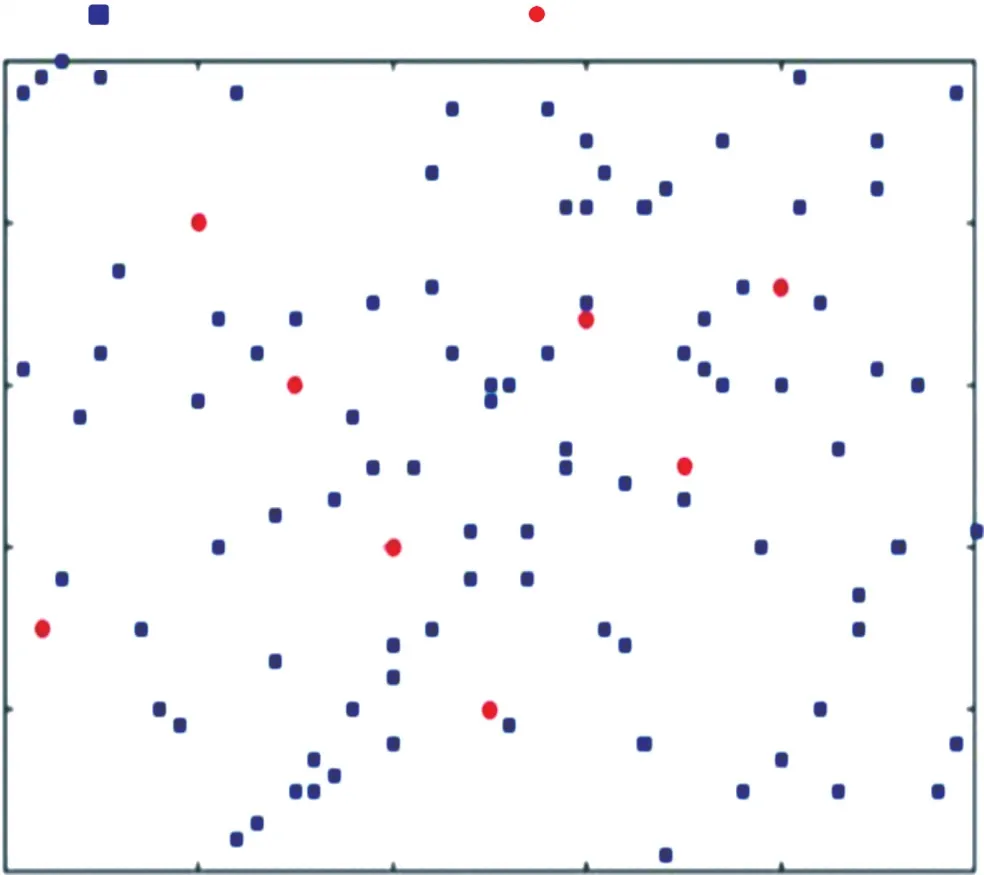
圖4 Scene-one的網絡拓撲示例(8個錨節(jié)點)
圖5 給出DV-HOP算法和HDCD算法在Sceneone環(huán)境下歸一化定位誤差。從圖可知,相比于DVHOP算法,提出的HDCD算法降低了定位誤差。此外,錨節(jié)點比例的增加,有利于定位誤差的下降。但是定位誤差與錨節(jié)點數(shù)并非呈線性關系。
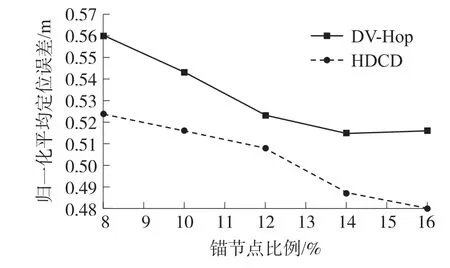
圖5 歸一化平均定位誤差(Scene-one)
3.2 Scene-one環(huán)境下的定位性能
圖6 給出Scene-two的網絡拓撲結構示例,其中未知節(jié)點數(shù)為100,錨節(jié)點數(shù)為10,錨節(jié)點分布不均勻。從圖可知,相比于圖5的Scene-one,網絡Scene-two中錨節(jié)點分布集中,未能在監(jiān)測區(qū)域內均勻分布。
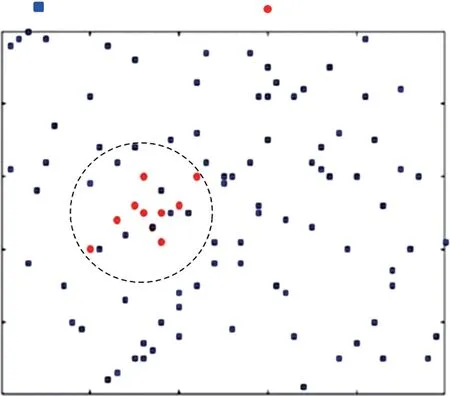
圖6 Scene-two的網絡拓撲結構示例(10個錨節(jié)點)
圖7給出Scene-two網絡環(huán)境下HDCD算法和DV-HOP算法的定位誤差隨錨節(jié)點數(shù)的變化情況。從圖可知,錨節(jié)點數(shù)的增加降低定位誤差。原因在于:錨節(jié)點數(shù)的增加,使未知節(jié)點獲取的測距信息越多,測距誤差越低。
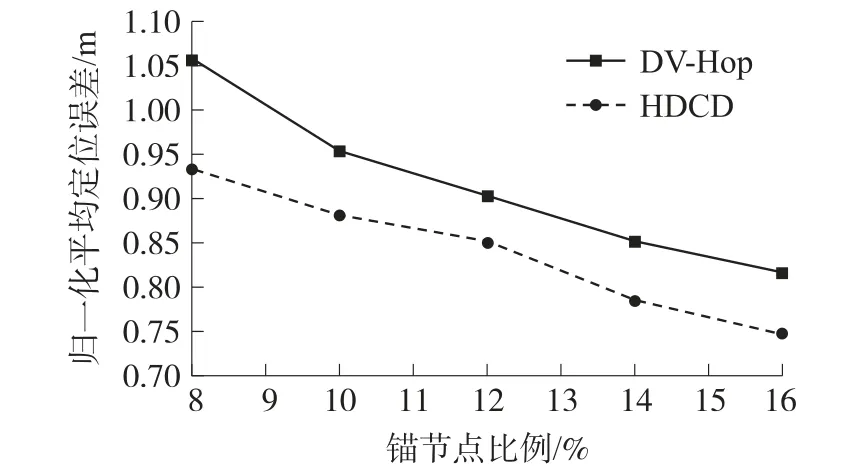
圖7 歸一化平均定位誤差(Scene-two)
此外,相比于Scene-one條件,Scene-two條件下的定位誤差偏大。原因在于:錨節(jié)點分布不均勻。離錨節(jié)點遠的未知節(jié)點,測距誤差較大,不不利于定位,導致定位精度下降。
3.3 Scene-three環(huán)境下的定位性能
圖8給出Scene-three的網絡拓撲結構示例,其中未知節(jié)點數(shù)為100,錨節(jié)點數(shù)為10。監(jiān)測區(qū)域內有障礙物,阻礙節(jié)點間直接通信。而在遠離障礙物的區(qū)域錨節(jié)點分布較均勻。
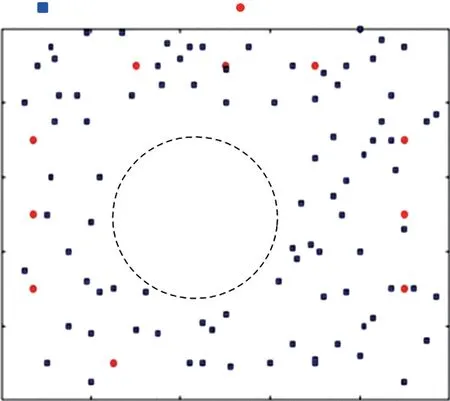
圖8 Scene-three的示例(10個錨節(jié)點)
圖9 給出Scene-three網絡環(huán)境下HDCD算法和DV-HOP算法的定位誤差。從圖可知,錨節(jié)點數(shù)量的增加,使定位誤差下降。這符合預期。此外,對比看圖8與圖7不難發(fā)現(xiàn),Scene-three環(huán)境下的定位精度高于Scene-two環(huán)境下的定位精度。原因在于:盡管Scene-three存在障礙物,除障礙物所在區(qū)域外的其他區(qū)域,錨節(jié)點分布均勻。
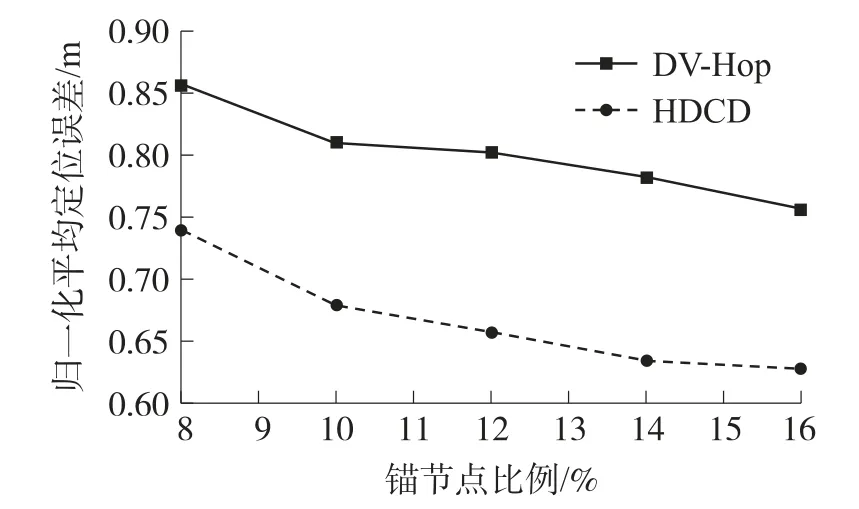
圖9 歸一化平均定位誤差(Scene-three)
3.4 Scene-four環(huán)境下的定位性能
圖10 給出Scene-four的拓撲結構示例,其中未知節(jié)點數(shù)為100,錨節(jié)點數(shù)為14。監(jiān)測區(qū)域內有障礙物,阻礙節(jié)點間直接通信。而在遠離障礙物的區(qū)域錨節(jié)點分布不均勻。
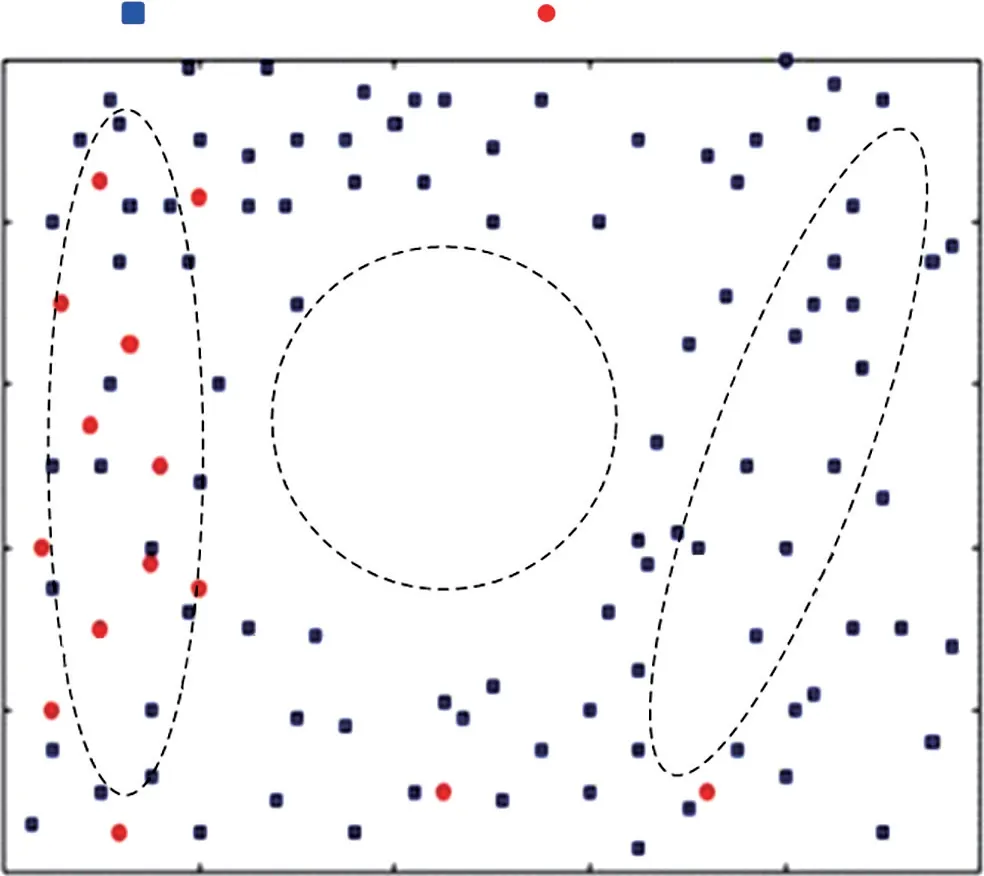
圖10 Scene-four的示例(14個錨節(jié)點)
圖11 給出Scene-four的網絡環(huán)境下HDCD算法和DV-HOP算法的定位誤差。從圖可知,錨節(jié)點數(shù)量的增加,使定位誤差下降。這符合預期。此外,對比看圖10與圖11不難發(fā)現(xiàn),Scene-three環(huán)境下的定位精度高于Scene-four環(huán)境下的定位精度。原因在于:Scene-four的定位環(huán)境很惡劣:既存在障礙物,錨節(jié)點分布又不均勻。
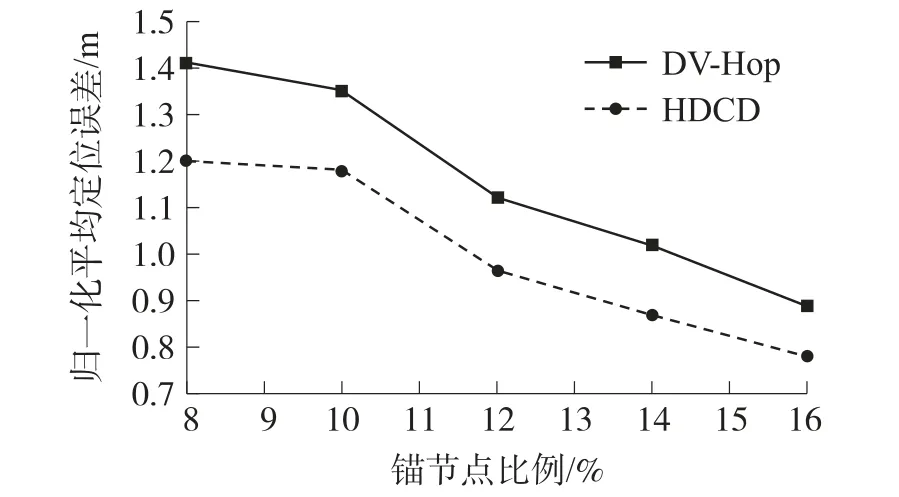
圖11 歸一化平均定位誤差(Scene-four)
表2給出四個網絡拓撲環(huán)境下的定位誤差。從2可知,Scene-two和Scene-four兩種環(huán)境下的定位誤差低于Scene-one和Scene-three。這主要因為:Scene-one環(huán)境下錨節(jié)點分布均勻,又不存在障礙物。盡管Scene-three環(huán)境中存在障礙物,但是其錨節(jié)點分布是均勻的,并且其通信半徑為20 m。節(jié)點通信半徑的提高,有利于降低定位誤差。
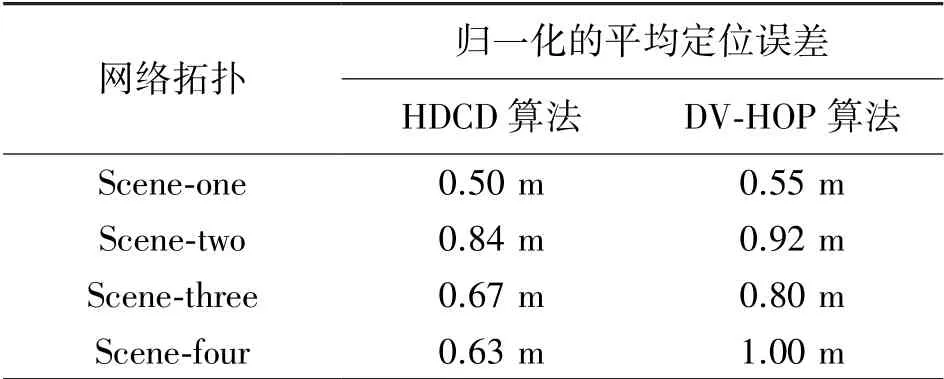
表2 四個網絡拓撲環(huán)境下的定位誤差
4 總結
考慮到實際環(huán)境中錨節(jié)點分布的不均勻性對定位精度的影響,提出了跳距修正的DV-HOP定位算法HDCD。HDCD算法依據(jù)錨節(jié)點的分布特性對跳距進行修正,減少定位誤差。針對不同拓撲環(huán)境,分析了HDCD算法的定位性能。仿真結果表明,相比于DVHOP算法,HDCD算法在Scene-one、Scene-two、Scenethree和Scene-four網絡條件下的歸一化的平均定位誤差分別下降了約9%、6.5%、16%和37%。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38