智能手機多頻多系統(tǒng)實時動態(tài)的定位性能分析
2021-12-14 08:32:06王楚極龍馳宇王鋒栗廣才
全球定位系統(tǒng) 2021年5期
關(guān)鍵詞:智能手機
王楚極,龍馳宇,王鋒,栗廣才
( 1. 武漢大學(xué) 測繪學(xué)院,武漢 430079;2. 武漢大學(xué) 衛(wèi)星導(dǎo)航定位技術(shù)研究中心,武漢 430079 )
0 引 言
近年來,位置服務(wù)在現(xiàn)代化社會中的需求逐漸提升. 不論是出行導(dǎo)航、共享單車還是快遞物流都需要獲取位置信息,人民的生活越來越離不開定位. 智能手機作為提供位置服務(wù)最普遍的移動設(shè)備,具有易攜帶、捕獲衛(wèi)星能力強等優(yōu)勢,擁有許多定位產(chǎn)品,如百度地圖、高德地圖,但這些產(chǎn)品仍然不能完全滿足人們的定位精度需求. 在城市復(fù)雜環(huán)境中,全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS)信號衰減受多路徑影響更加嚴(yán)重,影響了單點定位的精度和可用性[1]. 2016 年,谷歌宣布在Android 7.0 (Nougat)操作系統(tǒng)中開放獲取GNSS原始觀測數(shù)據(jù)的接口,極大地促進了智能手機高精度定位算法的研究與發(fā)展.
與此同時,智能手機GNSS 模塊的性能也在不斷提升. 2018 年,小米公司宣布在新發(fā)布的小米8 中搭載博通BCM47755 導(dǎo)航芯片,該芯片支持L1+L5 雙頻GNSS 信號. 與L1 相比,L5 的信號測距碼的碼片速率提高了10 倍,能有效抑制多路徑誤差,具有更強的魯棒性,這將有望進一步提升智能手機在城市環(huán)境中定位的精度[2].
實時動態(tài)(RTK)載波相位差分定位技術(shù)是高精度定位領(lǐng)域中常用的一種定位技術(shù),能夠在較短時間內(nèi)獲得較高的精度,滿足智能手機定位服務(wù)對精度和實時性的需求. 國內(nèi)外對于RTK 算法在智能手機上的應(yīng)用做了大量研究. 趙俊蘭等[3]對不同GNSS 系統(tǒng)下華為Mate20 Pro 的RTK 性能進行解算,在開闊環(huán)境下,基于智能手機北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS)能夠獲得分米級的定位精度. 趙碩等[4]通過動態(tài)和靜態(tài)實驗對小米8 單頻GPS 和BDS 的RTK 定位性能進行了對比分析,發(fā)現(xiàn)單頻GPS RTK 定位精度比單頻BDS RTK 的要高,靜態(tài)時GPS 在東(E)、北(N)、天(U)方向上的精度分別為0.146 m、0.555 m、0.463 m.冷宏宇等[5]分析了小米8 智能手機RTK 的定位精度,提出對智能手機原始GNSS 觀測值進行優(yōu)化,將有助于正確解算出整周模糊度,以提高定位精度.
上述研究主要關(guān)注智能手機的單頻RTK 定位性能,缺少對多頻多系統(tǒng)RTK 定位性能的探討. 為了探索智能手機在多頻多系統(tǒng)下RTK 算法的定位性能,本文選擇支持多頻多系統(tǒng)GNSS 信號接收的華為P40 智能手機為實驗設(shè)備,分別在靜態(tài)、動態(tài)開闊和動態(tài)遮蔽環(huán)境下進行測試,基于智能手機GNSS 原始觀測數(shù)據(jù)進行數(shù)據(jù)質(zhì)量評估和RTK 定位,并分析該智能手機多頻多系統(tǒng)RTK 在靜態(tài)和動態(tài)實驗下的定位性能.
1 智能手機RTK 定位原理
1.1 多頻多系統(tǒng)GNSS 觀測模型
GNSS 接收機從不同的衛(wèi)星導(dǎo)航系統(tǒng)中接收觀測量信息,其中主要用于高精度定位的觀測量為偽距觀測值和載波相位觀測值. 偽距通過測量信號傳播的時間延遲獲得衛(wèi)星至接收機間的距離,載波相位觀測值通過比對接收機產(chǎn)生的載波相位與接收到的衛(wèi)星載波得到兩者的載波相位差. 偽距和載波相位的觀測方程如下:

1.2 多頻多系統(tǒng)RTK 解算模型
1.3 隨機模型
隨機模型可描述觀測值的精度及相關(guān)性,由方差-協(xié)方差矩陣表示. 在多系統(tǒng)觀測模型中,認(rèn)為各系統(tǒng)觀測值之間互不相關(guān),故雙差觀測值的方差-協(xié)方差矩陣可表示為

式中:r、b分別表示流動站和基準(zhǔn)站;s為站間共視衛(wèi)星;L為載波相位觀測值;頻率f為對應(yīng)的頻率. 在上述站間單差基礎(chǔ)上再進行星間單差組成雙差觀測值,并依據(jù)誤差傳播定律,可獲得雙差相位觀測值的方差協(xié)方差矩陣
式中,s1為參考衛(wèi)星,s2···sm為非參考衛(wèi)星.
在雙差觀測模型的構(gòu)建中,一般認(rèn)為不同類型不同頻率的觀測值是互不相關(guān)的,其他系統(tǒng)類型在各個頻段的觀測值也可由以上方法獲得. 最終可得到GPS 系統(tǒng)的雙差協(xié)方差矩陣為
1.4 RTK 解算卡爾曼濾波模型
根據(jù)式(3)~(4)可構(gòu)建卡爾曼濾波模型的觀測方程和狀態(tài)方程如下:
量測更新則是指獲得當(dāng)前k時刻的觀測信息后,利用觀測信息對預(yù)測的狀態(tài)向量及協(xié)方差矩陣進行修正. 其增益矩陣以及狀態(tài)向量和方差協(xié)方差矩陣的更新計算如下所示:
1.5 手機原始觀測值獲取
2016 年5 月,谷歌宣布在Android 7.0 及之后的版本中開放了原始觀測數(shù)據(jù)的獲取,用戶可以通過Android Location API 獲取GNSS 原始觀測數(shù)據(jù). 其GNSS 原始觀測數(shù)據(jù)主要從API 中開放的GnssNavigationMessage、GnssMeasurement、GnssClock 三個類中獲取. 其中,通過GnssNavigationMessage 解調(diào)出衛(wèi)星星歷信息,基于GnssMeasurement 和GnssClock 提供的觀測信息和接收機鐘信息進行相應(yīng)轉(zhuǎn)換,最終生成每顆衛(wèi)星的偽距、載波相位和多普勒觀測值等定位原始觀測數(shù)據(jù)[6].
開放獲取原始觀測數(shù)據(jù)后,為了讓研究人員更加容易采集觀測數(shù)據(jù),一些企業(yè)也發(fā)布了一系列關(guān)于采集GNSS 原始觀測數(shù)據(jù)的應(yīng)用. 谷歌發(fā)布了可以輸出原始觀測值的日志記錄GNSS Logger 軟件,并公布了開源代碼,但該軟件只能獲取接收的GNSS原始數(shù)據(jù),不顯式提供偽距和載波相位等觀測值[7].2017 年Geo++公司發(fā)布了Geo++ RINEX Logger 應(yīng)用,它可以輸出RINEX 格式的GNSS 原始觀測值,研究人員無需系統(tǒng)學(xué)習(xí)Android 應(yīng)用的開發(fā),只需下載軟件進行操作,便可以直接獲取轉(zhuǎn)換的偽距和載波相位等觀測值,這為研究人員進行觀測數(shù)據(jù)分析提供了便利[8].
2 實驗與分析
本次實驗采用華為P40 智能手機作為移動定位設(shè)備采集原始觀測數(shù)據(jù). 該設(shè)備支持GPS (L1+L5 雙頻)、GLONASS、BDS (B1I+B1C+B2a 三頻,其中B1C和B2a 頻段暫時不可用)、Galileo (E1+E5a 雙頻)、QZSS (L1+L5 雙頻)多衛(wèi)星系統(tǒng)多頻段觀測值的獲取[9]. 為了分析不同狀態(tài)下智能手機RTK 的定位質(zhì)量,分別使用智能手機在靜態(tài)和動態(tài)環(huán)境下進行了實驗,在靜態(tài)和動態(tài)實驗中,基準(zhǔn)站都選用了安裝在武漢大學(xué)信息學(xué)部教學(xué)實驗大樓樓頂?shù)臏y量型基準(zhǔn)站.同時為了獲取參考解以評價RTK 的定位精度,在實驗過程中選用了Novatel SPAN-CPT 慣性導(dǎo)航與Trimble R9 接收機與華為P40 同時固定在小車上進行靜態(tài)實驗和動態(tài)實驗,如圖1 所示. 其組合導(dǎo)航的定位結(jié)果作為參考解. 本文首先對數(shù)據(jù)質(zhì)量進行分析,然后對靜態(tài)定位和動態(tài)定位的性能進行分析.
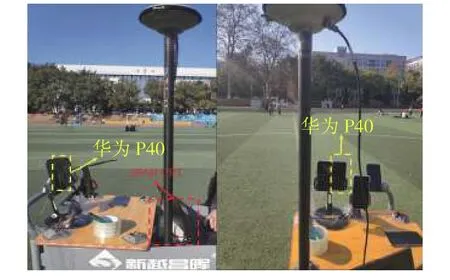
圖1 實驗場景
2.1 靜態(tài)實驗測試
為了測試智能手機在靜態(tài)環(huán)境下的定位精度,本次實驗將華為P40 智能手機固定在制動條件下的小車下,在開闊的操場中心進行了90 min 的靜態(tài)觀測,與旁邊的測量型接收機組成長度約為300 m 的短基線. 實驗時間從2021-01-19 T 04:44:00—06:14:00 協(xié)調(diào)世界時(UTC),采樣率為1 Hz.
2.1.1 數(shù)據(jù)質(zhì)量分析
獲取到靜態(tài)原始觀測數(shù)據(jù)后,對數(shù)據(jù)質(zhì)量進行分析,主要是從載噪比(CNR)和可見衛(wèi)星數(shù)兩個方面進行分析.
1) CNR
CNR 為輸出信號的功率和噪聲單位功率的比值,是評價接收信號性能的重要指標(biāo)之一. 一般CNR越大,說明觀測噪聲越小,信號的質(zhì)量越好[10]. 圖2為實驗中手機所接收到的衛(wèi)星在L1 頻段的平均CNR. 在該實驗中,智能手機接收到的衛(wèi)星平均CNR大部分處于30 dB-Hz 以上,僅個別衛(wèi)星CNR 在25 dBHz 左右,衛(wèi)星信號總體表現(xiàn)較好.
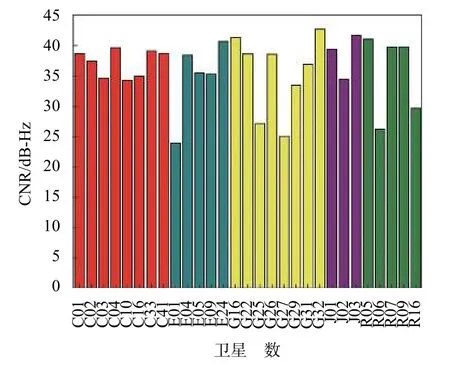
圖2 靜態(tài)實驗衛(wèi)星L1 頻段平均CNR
2) 可見衛(wèi)星數(shù)
華為P40 能夠觀測GPS、GLONASS、Galileo、QZSS 和BDS 的數(shù)據(jù). 該靜態(tài)環(huán)境下觀測到的不同系統(tǒng)的可見衛(wèi)星數(shù)隨時間的變化如圖3 所示. 由圖3可知,BDS 的可見衛(wèi)星數(shù)較多,大多數(shù)時刻能夠觀測20 顆以上. 具體而言,GPS 可見衛(wèi)星的平均數(shù)為6 顆,GLONASS 的為5 顆,BDS 的為20 顆,而Galileo 和QZSS 在大多數(shù)時刻的可見衛(wèi)星數(shù)低于4 顆,不能滿足單獨定位的條件.
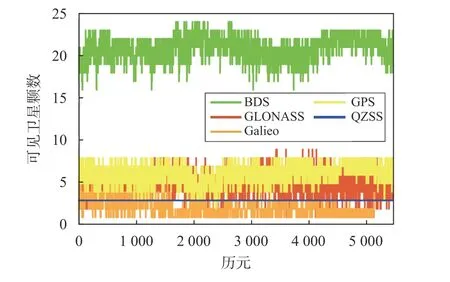
圖3 各歷元可見衛(wèi)星數(shù)
2.1.2 靜態(tài)手機RTK 定位精度
手機的RTK 定位結(jié)果是利用手機的原始觀測數(shù)據(jù)與基站觀測數(shù)據(jù)進行后處理差分解算得到. 將定位結(jié)果與參考真值進行比較,手機RTK 解算和手機芯片解在E、N、U 三個方向上的定位誤差隨時間的變化如圖4 所示,各個方向定位誤差的均方根(RMS)如表1 所示. 由圖4 可知,靜止?fàn)顟B(tài)下,隨著時間的推移,RTK 和芯片解定位的誤差都開始逐漸收斂,但芯片解誤差需要10 min 左右的時間才能收斂到米級,而RTK 定位在1 min 以內(nèi)便能夠收斂到亞米級. 芯片解在E、N、U 各方向的定位誤差RMS 分別為0.46 m、1.34 m、1.25 m,而多頻多系統(tǒng)RTK 對應(yīng)的定位誤差RMS 為0.20 m、0.39 m、0.31 m,比芯片解在三個方向的精度分別提升了56.52%、70.90%、75.20%. 因此,在靜態(tài)定位中多頻多系統(tǒng)RTK 具有更出色的定位性能.
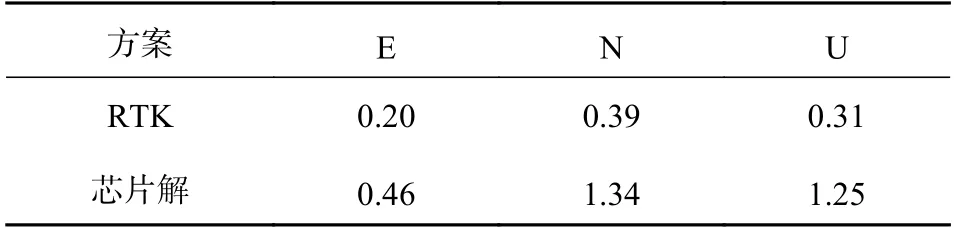
表1 靜態(tài)實驗華為P40 智能手機定位精度m

圖4 靜態(tài)定位誤差
2.2 動態(tài)車載實驗測試
為了測試智能手機RTK 動態(tài)定位性能,本文將華為P40 智能手機固定于小推車上,沿武漢大學(xué)信息學(xué)部操場跑道運動3 圈. 將RTK 解和芯片解的結(jié)果繪制到地圖上. 如圖5 所示,其中藍(lán)色表示芯片解的運動軌跡,紅色表示RTK 解的運動軌跡,黃色表示Novatel SPAN CPT 組合導(dǎo)航解的軌跡,該軌跡為參考線. 與參考線比較,智能手機本身芯片解誤差較大且不穩(wěn)定,而RTK 解算結(jié)果與參考線的誤差較小且穩(wěn)定,能夠很好地與參考線相符合. 如圖6 所示,當(dāng)小車受到跑道旁高大喬木和周圍建筑物的部分遮擋時,手機芯片解出現(xiàn)較大偏差,而RTK 的定位結(jié)果仍然能夠很好的接近于參考結(jié)果,這表明部分遮擋的狀態(tài)下RTK 能夠很好地抑制誤差.
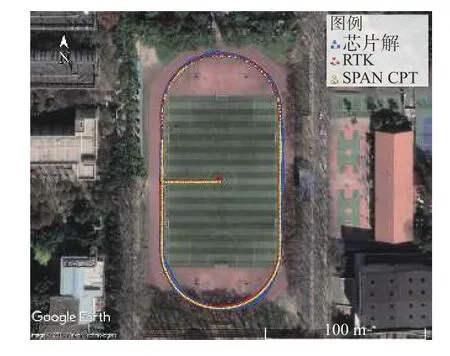
圖5 動態(tài)實驗運動軌跡
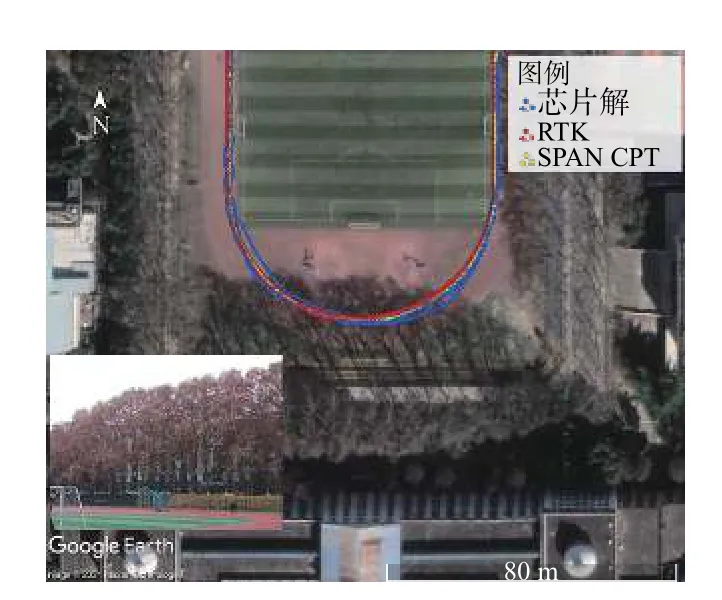
圖6 受影響運動軌跡
圖7 為華為P40 智能手機在E、N、U 三個方向的定位誤差隨時間的變化情況. 實驗表明:在動態(tài)環(huán)境下,多頻多系統(tǒng)RTK 的初始定位誤差較大,但隨時間能夠快速收斂,最終各方向誤差變化保持在1 m 以內(nèi). 芯片解由于受到周邊環(huán)境變化的影響出現(xiàn)劇烈波動,各方向最高均超過5 m 以上的誤差. RTK 三個方向的誤差RMS 分別為0.46 m、0.76 m、0.63 m,而芯片提供的定位解在E、N、U 三個方向的誤差RMS為0.74 m、1.44 m、1.36 m,RTK 的定位精度相比于芯片解在E、N、U 方向上提高了37.84%、47.22%、53.68%,如表2 所示.
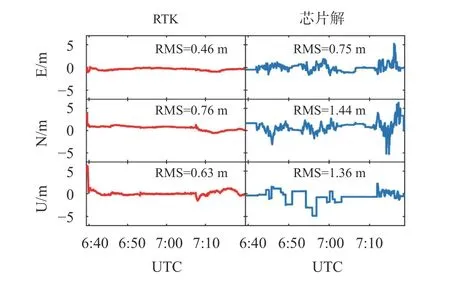
圖7 動態(tài)定位誤差

表2 動態(tài)實驗華為P40 智能手機定位精度m
2.3 觀測值殘差分析
觀測值殘差是觀測值與改正值相減后剩余的未被改正的部分,包括測量噪聲、多路徑誤差以及其他未模型化的誤差,是評價一個模型好壞的重要標(biāo)準(zhǔn).如圖8 所示,我們繪制了動態(tài)下多頻多系統(tǒng)RTK 模型的偽距和載波相位殘差. 由圖8 可知,偽距殘差的分布總體而言沿零上下波動,主要分布在20 m 以內(nèi).這可能是因為手機采用低成本、低功耗的芯片導(dǎo)致觀測噪聲較大,且使用的線性極化天線會引入較大的多路徑誤差. 雖然偽距殘差較大,但是在RTK 計算中偽距觀測值的權(quán)要小于載波相位觀測值的權(quán)(兩者權(quán)比一般為1:10 000),故可降低偽距噪聲的影響. 相位觀測值殘差的精度要遠(yuǎn)遠(yuǎn)高于偽距,誤差集中在0.1 m以內(nèi). 表3 給出了各系統(tǒng)的偽距和載波相位殘差的RMS 值. BDS 的偽距殘差和載波相位殘差較大,其RMS 分別為5.679 m 和0.013 m. QZSS 的偽距殘差最小,其RMS 為3.987 m. QZSS、GPS 和Galileo 系統(tǒng)的載波相位殘差相近,RMS 分別為0.005 m、0.006 m和0.004 m. 總體而言,偽距和載波相位的殘差為零均值且在合理范圍內(nèi)變化,說明誤差在多頻多系統(tǒng)RTK 模型中得到了很好地處理.

圖8 偽距和載波相位殘差
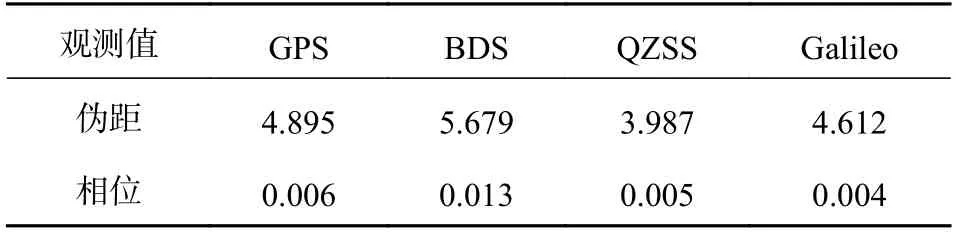
表3 不同衛(wèi)星系統(tǒng)觀測值殘差RMSm
3 結(jié)束語
本文針對智能手機多頻多系統(tǒng)的RTK 定位展開研究,利用華為P40 智能手機分別在靜態(tài)環(huán)境和動態(tài)環(huán)境下進行測試,對手機GNSS 觀測數(shù)據(jù)質(zhì)量和多頻多系統(tǒng)的RTK 定位性能進行了分析,得出以下結(jié)論:
1) Android 智能手機能夠接收多頻多系統(tǒng)GNSS信號,但接收到不同衛(wèi)星系統(tǒng)的可視衛(wèi)星數(shù)存在顯著差異. 在開闊環(huán)境下,華為P40 智能手機可接收到40 多顆衛(wèi)星,平均CNR 在30 dB-Hz 以上.
2) 華為P40 智能手機在靜態(tài)環(huán)境下的多頻多系統(tǒng)RTK 定位精度,相比于芯片解的精度有了較大的提升,在E、N、U 三個方向的定位誤差RMS 分別為0.20 m、0.39 m 和0.31 m,比芯片解提高了57%、71%和75%.
3) 華為P40 智能手機在動態(tài)環(huán)境下RTK 的定位精度在三個方向上均達(dá)到分米級,且誤差相比于芯片解更為穩(wěn)定,在部分遮擋的條件下也能較好的抑制誤差,相比于手機芯片定位更具優(yōu)勢.
猜你喜歡
紅領(lǐng)巾·萌芽(2022年9期)2022-11-24 05:55:58
英語文摘(2020年5期)2020-09-21 09:26:30
湖北農(nóng)機化(2020年4期)2020-07-24 09:07:46
瘋狂英語·新悅讀(2019年10期)2019-12-13 09:02:30
軍事文摘(2019年18期)2019-09-25 08:09:08
趣味(語文)(2018年8期)2018-11-15 08:53:00
信息安全研究(2016年4期)2016-12-01 06:06:47
海外星云(2016年7期)2016-12-01 04:18:00
新聞傳播(2016年11期)2016-07-10 12:04:01
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年4期)2016-05-17 05:35:45
