基于六旋翼無人機平臺的GNSS 干擾源測向與定位系統設計與實現
2021-12-14 08:32:14孫興信甄衛民張發祥
全球定位系統 2021年5期
關鍵詞:設備
孫興信,甄衛民,張發祥
( 中國電波傳播研究所,山東 青島 266107 )
0 引 言
本文設計了一種基于六旋翼無人機平臺的全球衛星導航系統(GNSS)干擾源測向與定位系統,該系統主要由無人飛行器、空中監測測向載荷、地面控制站三部分組成,無人飛行器選用現階段技術成熟的六旋翼無人機平臺. 此飛行平臺已被廣泛應用于航拍、植保、電力巡檢等行業. 空中監測測向載荷是基于雙通道采樣的超外差接收機[2],技術較為成熟,文章方案進行了小型化、輕量化的設計,能夠滿足六旋翼無人機平臺的載重要求. 地面站采用了大功率圖傳設備,能滿足長距離數據傳輸的時效性要求. 圖1 為該系統的實物圖,作者研究團隊在某飛行場區進行了干擾源定位精度的測試,證明此技術路線是切實可行的.

圖1 基于六旋翼無人機平臺的GNSS 干擾源測向與定位系統
六旋翼無人機提供干擾監測測向設備的搭載平臺,可以裝載監測測向設備. 機身和起落架之間預留足夠的空間,可掛載體積較大的吊艙和云臺,搭載的設備使用無人機電源進行供電.
空中監測測向載荷主要包括監測測向主機、監測測向天線、電子羅盤等,主要完成對干擾信號的監測、測向. 在查找干擾源的過程中,相機對干擾環境進行拍照,數傳發射設備和圖傳發射設備分別將監測數據和圖像信息實時回傳地面控制站.
地面控制站一方面完成對無人機飛行器的控制和飛行路線的顯示;另一方面完成干擾監測信號的實時接收、處理、顯示,以及參數設置等. 地面控制站硬件設備組成主要包括:數傳設備、圖傳設備、飛控設備、監控終端(含監控計算機1 臺、數據處理計算機1 臺)等,軟件包括地面無人機飛行顯控軟件和干擾源監測與定位軟件.
1 六旋翼無人機平臺
基于六旋翼無人機平臺的GNSS 干擾源測向與定位系統采用定制的六旋翼無人機系統,該系統主要用于執行城市、叢林、山地等復雜地形環境下的偵察、監視、跟蹤、識別地形和道路通行情況觀察,以及偵察校射等任務.
如圖2 所示,六旋翼無人機系統由飛行器子系統、測控子系統、綜合保障子系統、任務載荷子系統組成.
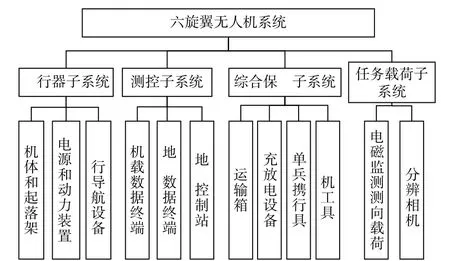
圖2 六旋翼無人機系統組成圖
2 空中監測測向載荷
空中監測測向載荷主要由測向天線陣(含切換開關)、射頻模塊、中頻模塊、電子羅盤、電源控制模塊組成. 其中測向定位所需的GPS 數據由無人機平臺實時提供,空中監測測向載荷架構組成圖如圖3所示.
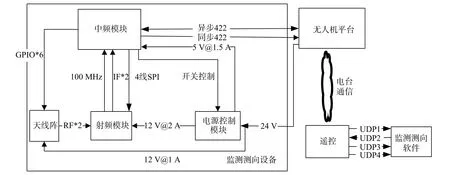
圖3 空中監測測向載荷架構組成圖
無人機測向天線由1 000~3 000 MHz 天線陣、射頻開關矩陣、結構件等幾部分組成. 無人機測向天線的外形示意圖如圖4 所示,高度約0.2 m,總重量小于1.2 kg.

圖4 天線示意圖
測向天線陣采用五振元天線陣,頻率覆蓋方位1 000~3 000 MHz. 測向定位天線包括天線陣元、電子羅盤和射頻開關. 天線陣元接收空間中的電磁信號,經由天線陣控制器中的RF 信號模塊處理后,輸出可用于無線電測向的RF 信號,以便后續進行測向定位算法. 電子羅盤提供磁北方向,開關矩陣選擇兩個天線陣元接到兩路輸出通道上. 測向天線陣原理圖如圖5 所示.
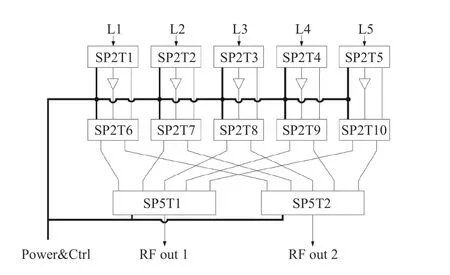
圖5 測向天線陣原理圖
空中監測測向接收機采用超外差式數字接收機技術研制[3-5],結合固態微波及嵌入式軟件技術,將來自天線的1 000~3 000 MHz 射頻信號下變頻成76.8 MHz 中頻輸出到AD,經帶通采樣后,轉換成數字信號[6].
3 地面站
地面控制站一方面完成對無人機飛行器的控制和飛行路線的顯示;另一方面完成干擾監測信號的實時接收、處理、顯示以及參數設置等.
地面控制站硬件設備組成主要包括地面數傳終端、圖傳終端、地面飛控便攜計算機(便攜式工業地面站)、數據處理終端等.
六旋翼無人機系統地面站軟件包括地面無人機飛行顯控軟件和干擾源監測與定位軟件. 兩款軟件可以將結果融合處理顯示,根據無線電監測管理軟件定位結果,可通過飛控軟件設置無人飛行器自動飛行,逐步逼近發射源. 在飛機遙控范圍邊緣報警、返回.
4 工作流程
基于六旋翼無人機平臺的GNSS 干擾源測向與定位系統的工作流程主要是先發現干擾源,再提取干擾源參數信息,然后對干擾源進行測向,最后進行交匯定位,找到干擾源位置. 具體流程如圖6 所示.
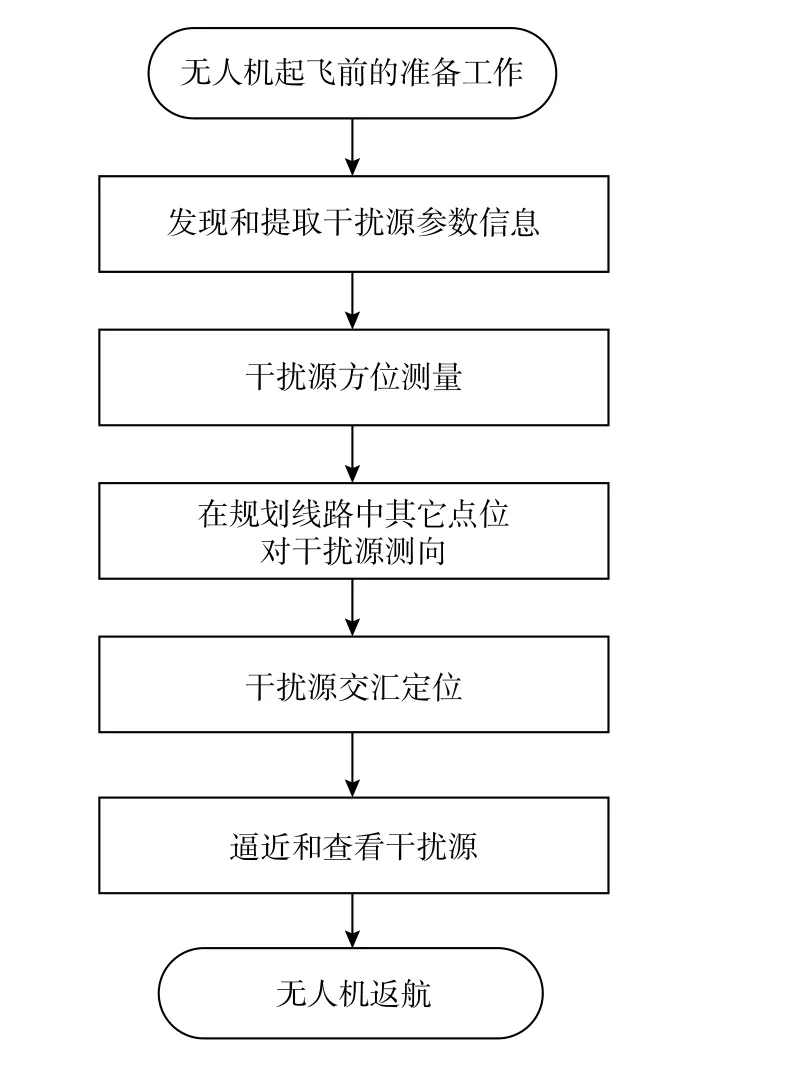
圖6 系統工作流程圖
a) 無人機升空前準備工作:規劃好飛行路線(用于查找干擾源位置,飛行軌跡一般采用“L”形狀,即L型航跡規劃),給整套設備加電啟動,檢查設備和通信鏈路是否正常.
b) 發現和提取干擾源參數信息:無人機垂直升空到指定高度后原地駐留,電磁監測測向載荷開啟頻率掃描監測模式,發現和提取干擾源參數信息,對干擾源信號參數信息進行本地存儲,同時將結果上報.
c) 干擾源方位測量:獲取干擾源信息參數后,在該駐留點位對該干擾源進行測向,結果在本地存儲并同時將結果上報.
d) 規劃其他點位對干擾源測向:第一個駐留點位測向完畢,按規劃的其它點位,對該干擾源進行測向,結果在本地存儲并同時將結果上報;無人機空中測試完成,返回地面.
e) 干擾源定位:通過每個駐留點位的干擾源參數提取和方位測量的結果,對干擾源交匯定位.
f) 逼近查看干擾源:干擾源定位后,評估干擾源在無人機飛行范圍內,無人機可逼近干擾源位置,通過相機載荷,對干擾源進行監視.
5 試驗驗證
試驗驗證平臺由待測設備、模擬信號源、發射天線和測試軟件等組成,如圖7 所示. 試驗驗證平臺一般架設于空曠無遮擋、電磁環境好的標準場地,按照工作流程放飛無人機,并調整工作模式;選定某一地點架設干擾系統,利用干擾源發射連續波、調頻、調幅等多種干擾.
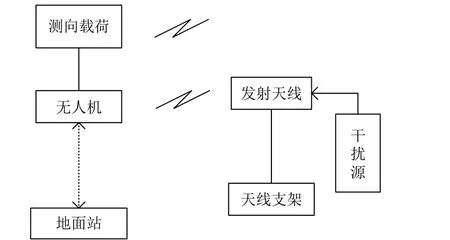
圖7 試驗驗證平臺
通過以上論述,作者研究團隊在河南省安陽市六寺小學附近進行了一次針對基于六旋翼無人機平臺的GNSS 干擾源測向與定位系統的驗證試驗,飛行圖如圖8 所示.

圖8 試驗驗證飛行照片
起飛后,在某一地點架設干擾系統,利用干擾源發射連續波、調頻、調幅等多種干擾. 干擾源測向與定位系統開始工作,首先監測北斗衛星導航系統(BDS)/GNSS 頻段附近有無干擾,如果有干擾,則選定第一個地點對干擾源進行測向,如圖9 所示. 測向結束后,保存數據,執行L 型航跡規劃指令,無人機自動飛到第二個合適的地點,同樣對該干擾進行測向,并聯合第一次的測向結果進行交叉定位,如圖10 所示.

圖9 選定第一個地點對干擾源進行測向

圖10 飛行L 型軌跡后的第二個地點對干擾源進行測向并交叉定位
通過此次試驗驗證,干擾源系統選取BDS/GNSS主要頻點(f1,f2,···,fn),發射連續波、調幅、調頻等多種窄帶、寬帶干擾源,并通過干擾源測向與定位系統對干擾源進行檢測、定位,從以下測試表格中得到檢測時間、檢測概率、干擾源測向精度、定位精度.
此次試驗共發射了6 種干擾類型,即F1 連續波干擾、F1 調頻干擾、F1 調幅干擾、F2 連續波干擾、F2 調頻干擾、F2 調幅干擾(F1 指干擾頻點1,F2 指干擾頻點2,在此次試驗中F1 選取1 268 MHz,F2 選取1 575 MHz). 每種干擾類型進行了20 次飛行試驗,統計每次試驗的成功率(10 min 內定位出干擾源位置即為成功)即為檢測概率[1]. 從開始飛行到定位到干擾源位置的時間間隔為檢測時間. 測向精度為每一次測向結果與真實方向值(真實方向值通過試驗前的GPS 打點值計算得出)的方向差. 干擾源定位精度的計算為:首先計算測得干擾源位置與真實干擾源位置的距離,然后計算兩次測向過程中第一次測向點位與真實干擾源位置的距離,最后得到二者的比值,即為得到的干擾精度. 統計每次干擾精度值,取平均值填入表1.
測試表格如表1 所示,數值均為每種干擾類型下得到的數值平均值.
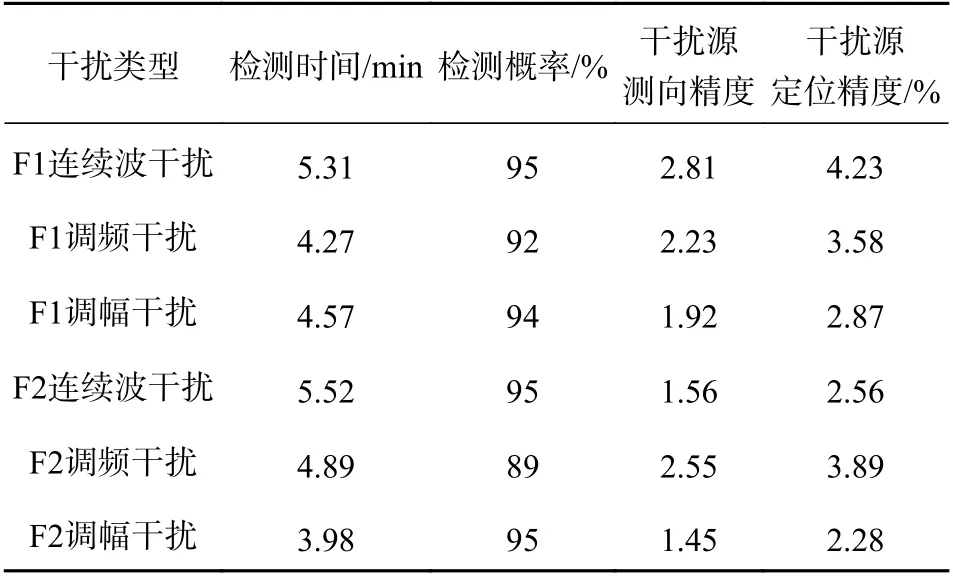
表1 測試表格
通過此次試驗,可以該系統的研制方案切實可行,可以對特定類型的干擾源進行有效的查找與定位,解決了某些不利地形情景下查找干擾源的難點.通過統計[7]. 可以看到,以R為測量半徑,該系統的測向精度在3°以內,定位精度在5%.
6 結 論
無論是車載還是手持式干擾源查找設備,查找過程受地面環境影響較大,有時存在遮擋、或不易逼近干擾源等情況發生. 為探索干擾源定位新方式的可能性,作者研究團隊打破了基于無人飛行器的導航干擾源探測方面主要集中在理論研究與仿真實現階段的束縛,試制一套基于六旋翼無人機平臺的GNSS 干擾源測向與定位系統,可以實現對特定類型的干擾源進行有效的查找與定位,解決了某些不利地形情景下查找干擾源的難點.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
