基于S7-1200PLC 的機器人自動分揀控制系統設計
2021-11-22 09:42:46付建彬
韶關學院學報 2021年9期
付建彬
(廣東省嶺南工商第一技師學院 機電工程系,廣東 韶關 512026)
關鍵字:S7-1200PLC;機器人;視覺系統;自動分揀
隨著科學技術的不斷發展,自動化程度也越來越高,以往物料的分揀工作都是由人工完成,而人工分揀往往會出現效率低、錯誤率高等缺點.基于PLC 的機器人自動分揀裝置具有安全性強、工作效率高等優點,已經成為目前物料自動分揀控制的主流,它可以根據設定的程序高效工作[1].本項目設計由硬件系統和軟件系統兩部分組成.硬件系統由車間現有的設備構成,并繪制相關的電氣原理圖.軟件系統包括:PLC編程軟件、視覺軟件、機器人程序及觸摸屏軟件組成.系統采用工業機器人對物料進行分揀入庫,由PLC控制器構成控制系統,結合視覺系統進行物料識別[2-3],并通過人機界面進行操作與實時監控,整個運行狀態一目了然.
1 硬件設計
硬件設計用到的實訓設備是由配電裝置、光源指示裝置、出料機構、傳送機構、糾正裝置、視覺檢測模塊、觸摸屏、機器人等.根據本系統設計的要求,系統框圖如圖1 所示.
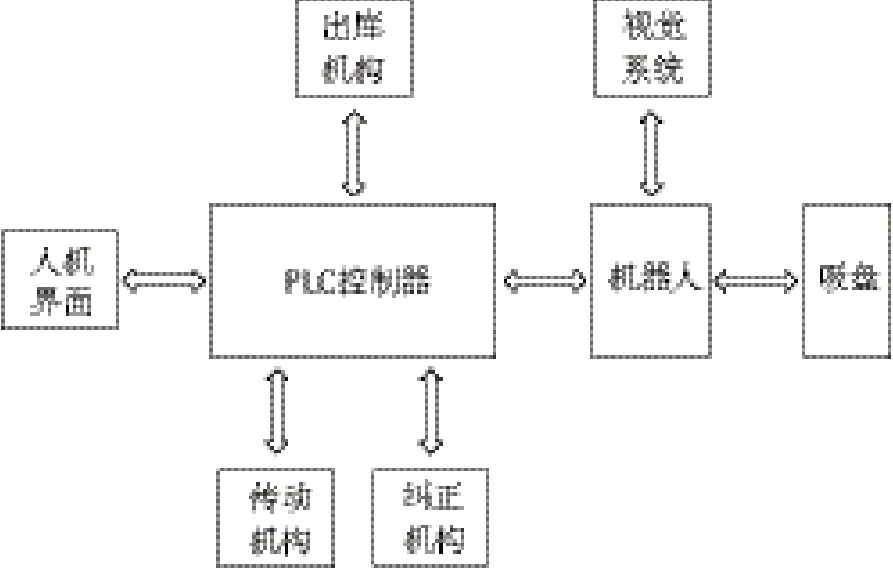
圖1 系統框圖
1.1 出料、傳送及糾正系統
該控制系統由出料裝置、傳送機構和糾正裝置三個部分組成.其中,出料裝置通過氣缸擊打方式實現物料的出庫[4],氣缸由兩位四通電磁閥控制,氣缸上方伸出到位傳感器和縮回到位傳感器來檢測推料氣缸的運行位置.出料裝置右側有一個出料筒,它用于放置物料,其下方的傳感器用于檢測筒內有無物料.
傳送機構由皮帶傳送的方式實現,傳送帶與三相異步電動機通過同步帶連接運行.其中,三相異步電動機由無級調速裝置進行速度設定,并通過PLC 控制皮帶實現正反轉運動.傳送機構的末端安裝有傳感器用于檢測物料位置,從而實現下一步控制.
糾正機構的后方是氣缸,由兩位四通電磁閥控制,實現糾正機構上升與下降動作.氣缸上方有一個上升到位傳感器和下降到位傳感器.糾正機構上的機械抓手用于抓取物料,并通過齒輪旋轉帶動抓手進行翻轉動作.糾正機構下方有擋料推桿,用于固定物料位置,從而進行物料拍照識別及糾正操作.出料、傳送及糾正系統如圖2 所示.
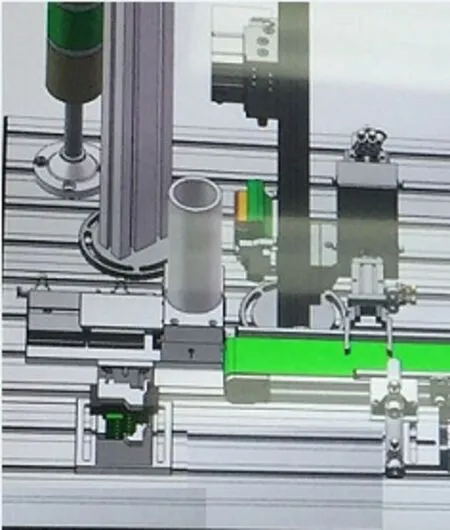
圖2 出料、傳送及糾正系統
1.2 視覺系統
視覺系統采用眾為興AVS3200 視覺控制器,AVS3200 智能視覺識別系統主要功能是實現物料拍照識別及定位、配合上位機軟件ADTvision 進行操作.可以通過以太網、串口、Modbus 以及I/O 接口輸出的方式將定位結果快速回傳至LC 以及各種類型的控制器.利用ADTvision 軟件對物料圖樣進行采集,建立物料模板類型,并通過以太網的連接與機器人進行通訊,將識別的物料模板信息傳送給機器人[5].整個視覺系統由硬件和軟件兩個部分組成,硬件部分包括:視覺控制器、相機、鏡頭、光源及光源控制器 ,軟件部分主要有ADTvision 軟件.
1.3 PLC 控制器
目前,自動分揀控制系統主要的控制方式包含:繼電器控制、單片機控制以及PLC 控制等各種控制方式.其中,PLC 控制具有可靠性高、穩定性好、操作簡單等優點,本系統PLC 控制器選用了西門子S7-1200PLC .這是一款緊湊型、模塊化的PLC, 它能很好的完成各種簡單的邏輯控制、網絡通信等任務[6].本系統PLC 選用的是1214C DC/DC/DC 型號的CPU,該型號PLC 有14 個輸入、10 個輸出,共24 個點數.其中該CPU 右側可以擴展8 個信號模塊,左側可以擴展3 個通信模塊.選用S7-1200PLC 作為控制器能很好的滿足本系統設計的要求.
本控制系統的物料檢測及出庫、物料傳送及糾正控制是由PLC 及各元器件共同配合實現[7-8].物料圖案的模板建立、識別及物料分揀入庫是由視覺系統及機器人配合實現.其中PLC、機器人及視覺系統通過以太網進行通訊實現信息傳遞,各元器件與PLC 控制關系,如圖3 所示.
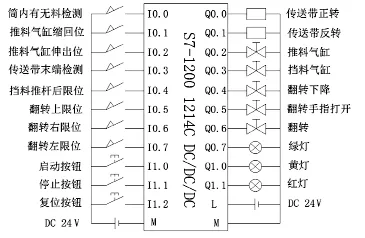
圖3 PLC 外部接線圖
1.4 觸摸屏
人機界面是一種智能化操作顯示裝置,能適應設計人員的工作要求,方便操作人員對系統運行狀態進行現場監控和修改相關數據.本系統設計采用了威綸通10.1 英寸 的觸摸屏,其型號為MT8102iE.該觸摸屏和PLC 的通訊通過以太網實現,通過觸摸屏界面實現對整個控制系統實時狀態的監控.
1.5 機器人系統
本系統的機器人選用的是眾為興AR6520 SCARA 四軸機器人,該機器人僅重24.3 kg,工作范圍 600 mm.該機器人具有結構精巧靈活、傳動精度高、運行速度快、噪聲小等優點.配合眾為興驅控一體控制器QC400A 及RPB06 示教器使用,機器人系統支持串口、網絡、USB 等多種通訊方式.其末端執行器配備了各種工具,如:手抓、噴槍及真空吸盤等,本分揀系統采用真空吸盤工具,通過吸盤來吸取物料.
2 軟件設計與調試
本系統中軟件設計部分包括:PLC 程序設計、觸摸屏界面設計、視覺系統處理及機器人程序設計4個部分組成.其中,PLC 程序設計主要完成對物料檢測、物料出庫、傳送帶控制、糾正機構控制、機器人通訊及觸摸屏的信息交換與控制.通過觸摸屏界面設計實現了與PLC 信息交換[8],從而達到對整個系統實時狀態的監控及相關參數修改的目的.視覺系統處理先在相應的ADTvision 軟件上對不同圖案的物料進行模板建立,后進行物料識別并根據不同的物料發送指令給機器人進行下一步動作.機器人接收PLC 發送的指令信息后,完成對不同模板的物料進行分揀及入庫動作.該系統工作流程如圖4 所示.
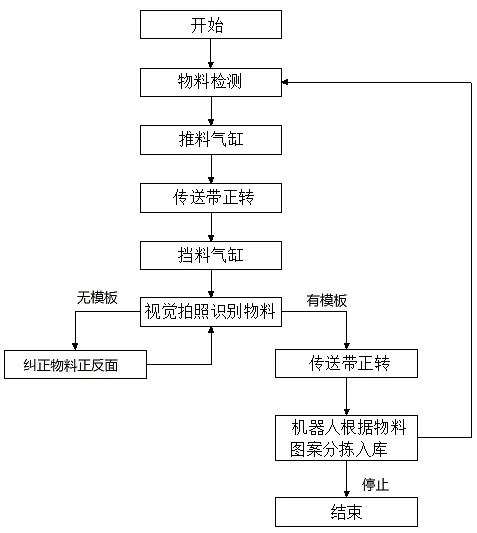
圖4 工作流程圖
2.1 PLC 程序設計
根據所選擇的PLC 型號,對本系統設計中PLC的輸入輸出端子進行分配,其I/O 分配如表1 所示.
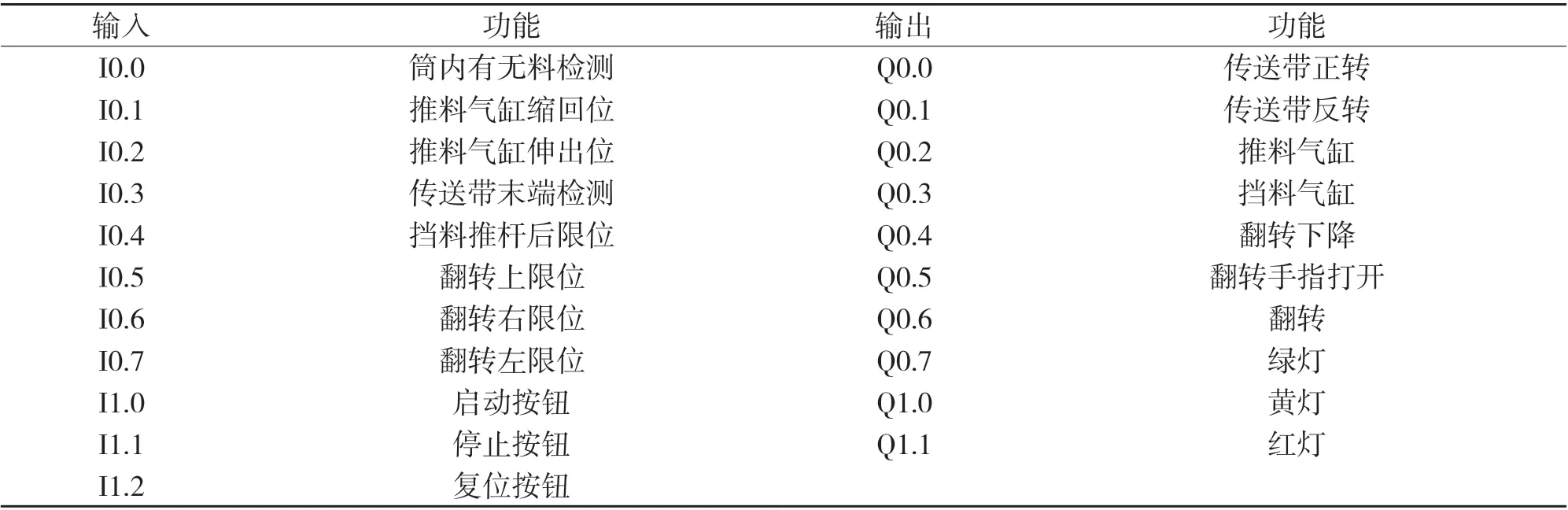
表1 I/O 分配表
2.2 觸摸屏界面設計
本系統中,觸摸屏界面由自動控制畫面和手動控制畫面兩個界面組成,其中自動控制畫面由系統狀態顯示、物料分揀計數顯示及操作按鍵區域3 個部分組成.系統狀態顯示區域,用來顯示系統的運行狀態和倉內是否還有物料.物料分揀計數區域分別對圓形圖案物料及三角形圖案物料進行計數.操作按鈕區域對系統動作進行控制,有啟動、停止、復位及進入手動界面幾個按鍵.手動控制畫面是對每個動作進行單獨控制,主要有推料、傳送帶正反轉、擋料、翻轉等動作.觸摸屏與PLC 之間用以太網進行通訊,能保持數據的實時性,通過觸摸屏方便了操作人員對整個控制系統實時狀態的監視與控制.
2.3 機器人程序設計
機器人程序編程方法有示教器編程及離線編程兩種,本設計采用示教器編程方法,首先將示教器的IP 地址設定與電腦IP 地址同一網段即可.如示教器IP 地址是:192.168.0.123,電腦IP 地址設定為:192.168.0.125.并通過示教器示教4 點,其中P1 為初始點,P2 為抓取點,P3 為物料1 放置點,P4 為物料2放置點,示教點位如表2 所示.

表2 機器人示教點位表
當傳感器檢測到物料到達位置后,通過PLC 程序發送指令給機器人,機器人程序開始運行.機器人從初始點位運行到抓取點位,機器人運行過程中吸盤同時進行抽真空,從而吸取物料進行搬運,并根據物料的圖案不同進行判斷放置的位置.移動到相對應的放置點位置后,吸盤斷開抽真空動作物料放下,完成分揀動作.機器人完成分揀動作后返回初始點,給PLC 反饋信號[9],系統繼續進行循環動作,直至筒內再無物料或按下停止按鈕后動作停止.如需讓系統繼續運行應往筒內加料或重新按下啟動按鈕,系統才會繼續動作.
2.4 視覺系統處理
視覺系統處理在相應的ADTvision 軟件中編輯完成,在進行軟件編輯時候要對其以太網進行設定,通過以太網設定使得視覺系統與機器人進行信息傳遞.其中服務器IP 用機器人的IP,本地IP 地址與機器人IP 地址同一網段,本地端口設定2000.通過ADTvision 軟件實現對不同圖案的物料進行識別并建立相應的模板,通過與機器人通訊進行信息反饋,實現后續分揀動作.
2.5 程序調試
首先,將機器人示教器開關打到自動運行狀態,此時機器人運行到初始位準備動作[10].再按下觸摸屏界面中的啟動按鈕,系統開始運行.傳感器檢測到筒內有物料,推料氣缸動作,將物料推送到傳送帶上,傳送帶開始正轉動作.物料運行到糾正機構下方,擋料氣缸動作,傳送帶停止正轉.通過視覺系統對物料拍照及模板識別,將模板信息反饋到機器人,機器人將信息傳遞到PLC.根據PLC 程序進行下一步動作,如識別到沒有模板物料,系統將對物料進行糾正動作,糾正完成后繼續對物料進行拍照及模板識別.如果識別有模板物料,傳送帶繼續運行到傳送帶末端,末端傳感器感應后傳送帶停止運行.通過PLC 發送指令信號給機器人,機器人根據識別的不同模板的物料進行分揀入不同的庫. PLC 與觸摸屏保持實時通信,操作人員能對系統的運行狀態進行實時監視與操作.在觸摸屏界面上能清楚看到不同物料的分揀個數,能方便操作人員進行控制.
3 結論
本系統設計主要針對物料分揀,采用PLC 控制機器人來實現,具有很高的可靠性,提高了生產效率.通過視覺系統與機器人的配合,實現對不同形狀的物料進行分揀入不同庫里.操作人員能在觸摸屏界面上直觀的看到不同物料的入庫個數,對整個運行狀態進行實時監控.該系統能很好的運用在自動化生產物料分揀中,有較強的實用意義.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
家庭影院技術(2017年9期)2017-09-26 03:41:45
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
