基于近似最近鄰搜索的改進PRM算法
2021-11-20 01:57:12葉曉康
計算機工程與設(shè)計 2021年11期
薛 陽,孫 越,葉曉康,李 蕊,華 茜
(上海電力大學(xué) 自動化工程學(xué)院,上海200090)
0 引 言
機器人的路徑規(guī)劃是機器人領(lǐng)域的基礎(chǔ)部分也是核心部分[1]。路徑規(guī)劃的方法也很多,經(jīng)典的有:人工勢場法[2,3]、柵格法[4]、蟻群算法[5,6]等;基于隨機采樣的路徑規(guī)劃算法有:快速搜索隨機樹(rapid-exploration random tree,RRT)法[7,8]還有概率路線圖(probabilistic roadmap,PRM)法[9]等。相對于需要知道環(huán)境中障礙物精確位置并精準(zhǔn)建模的路徑規(guī)劃算法,基于隨機采樣技術(shù)的PRM算法可以有效解決高維空間和復(fù)雜約束中的路徑規(guī)劃問題。PRM算法廣泛應(yīng)用于移動機器人、機械臂以及無人機航跡規(guī)劃中。Mohanta JC和Keshari A提出了PRM算法和模糊控制系統(tǒng)結(jié)合使用,使得規(guī)劃的路徑更平滑更短,從而縮短了導(dǎo)航時間[10]。鄒善習(xí)等通過隨機節(jié)點生成函數(shù)在自由空間生成的節(jié)點取代障礙物中節(jié)點,配合改進的節(jié)點增強法,提高節(jié)點利用率,減少PRM算法計算量[11]。
PRM算法的改進一般是通過得到更短的最優(yōu)避障路徑,從而減少了移動機器人在行駛過程的時間。PRM算法基于隨機采樣策略,當(dāng)增加空間中的采樣點或者增加最近鄰點個數(shù)時,無向路徑圖的構(gòu)建將會更完備,最終得到的避障路徑會更優(yōu)。但是以上情況會使得算法運算量呈指數(shù)級增長,從而算法非常耗時。針對PRM算法存在的這一缺陷,文中提出引用處理數(shù)據(jù)的局部敏感哈希算法[12],加速PRM算法無向路徑圖的構(gòu)建,從而提高了PRM算法的效率。在不降低最優(yōu)路徑的質(zhì)量的前提下,有效提高了PRM算法整體運行速度。
1 傳統(tǒng)PRM算法
PRM算法是一種基于圖搜索的方法。傳統(tǒng)的PRM算法包含兩個階段:離線建圖、在線查詢。第一階段離線建圖:通過隨機采樣點將連續(xù)空間變成離散空間,然后使用局部規(guī)劃器將采集的樣本節(jié)點相互連接并去除與障礙物相交的連線,最終形成了一個無向路徑圖如圖1(a)所示。第二階段在線查詢,使用A*等搜索算法在路徑圖上尋找無碰撞的最優(yōu)路徑如圖1(b)所示。圖中方塊表示障礙物,淺色細線代表可行路徑,深黑色線代表最優(yōu)路徑。

圖1 傳統(tǒng)PRM算法運行結(jié)果
如算法1顯示的一個典型的PRM算法。從一個空的路徑圖G=(V,E)開始,其中V是給定的自由空間Cfree中生成的隨機點集,E是所有可能的兩點之間的路徑。
(1)在自由空間中生成隨機采樣點q,從而確保機器人在采樣點不會與障礙物相碰撞。生成這些采樣點的最簡單方法是使用均勻分布隨機采樣。另一個簡單的方法是使用低差異序列來產(chǎn)生樣本。在一些完全隨機的環(huán)境中,上面兩種方法已經(jīng)足夠。但是移動機器人所處的環(huán)境一般更組織化和結(jié)構(gòu)化。例如,移動機器人在房屋里移動,則墻壁和家具都會成為障礙物,并且在較大的空白區(qū)域機器人都可以自由移動。這類環(huán)境中,要使用不同的方法來增強采樣,一些方法嘗試在障礙物附近節(jié)點采樣,而其它方法嘗試對障礙物盡可能遠的節(jié)點采樣。還有一些方法可以將配置空間劃分為不同的區(qū)域,然后嘗試檢測對每個區(qū)域進行采樣的最佳方法。
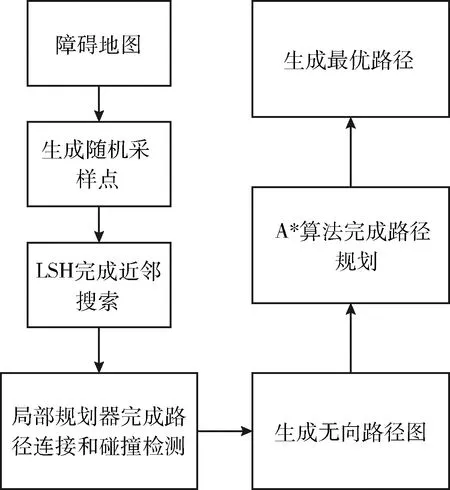
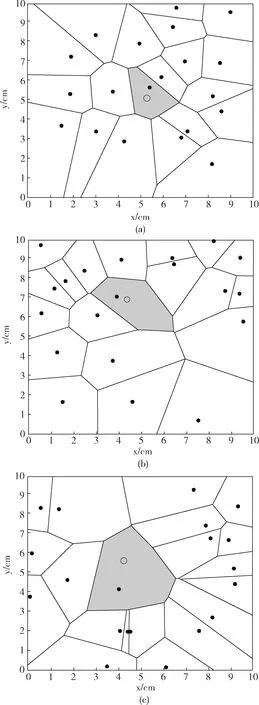
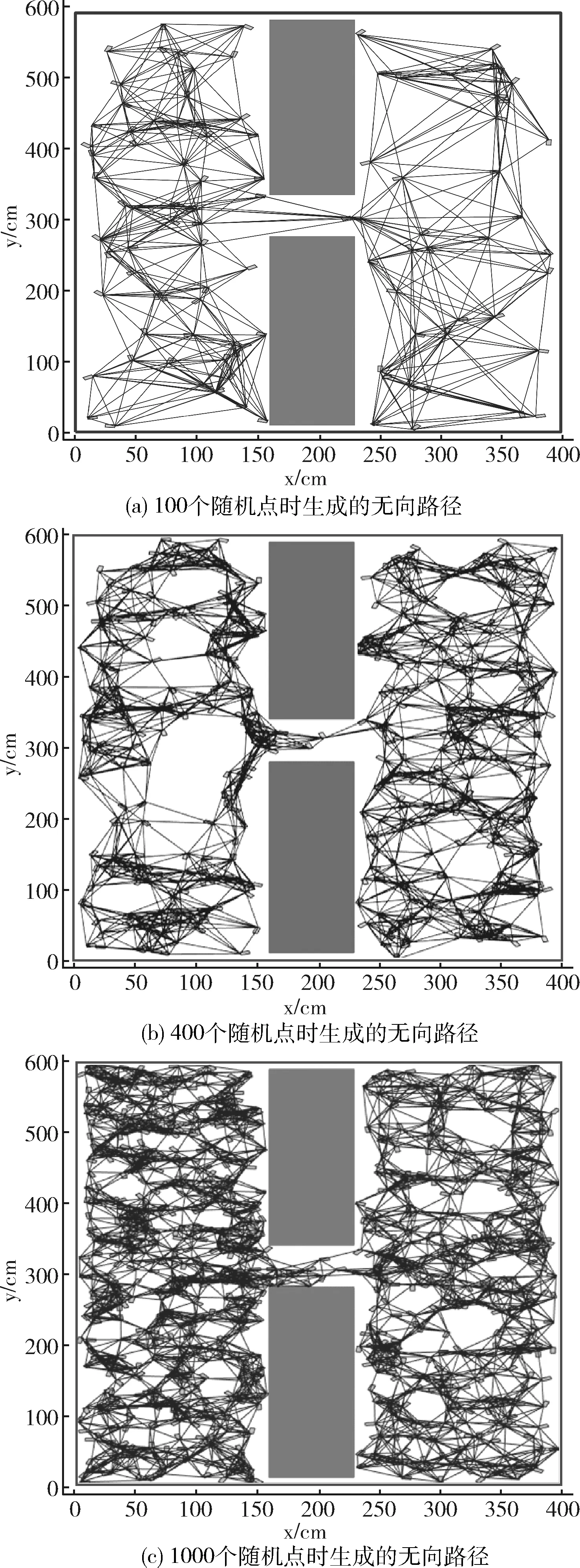
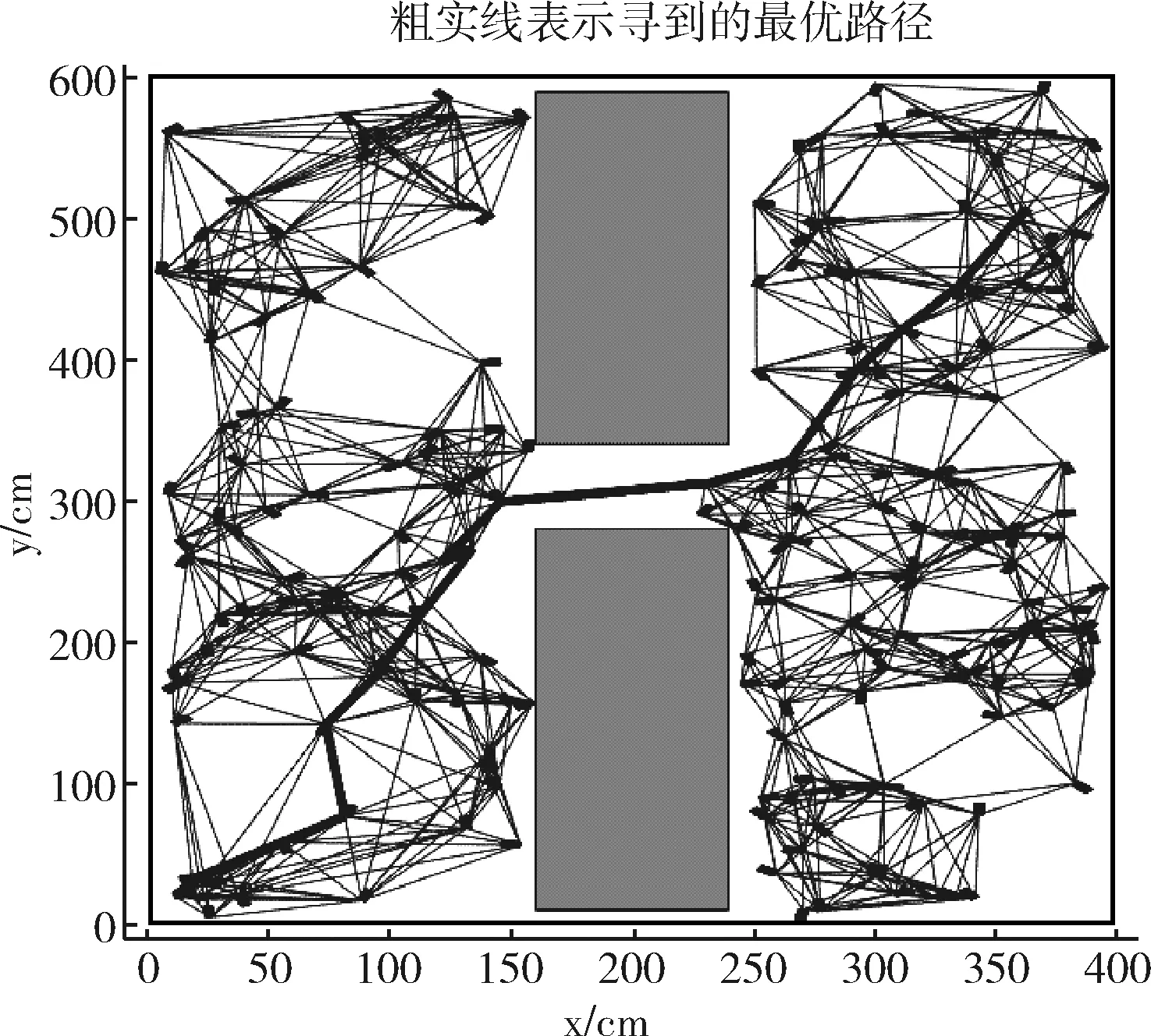
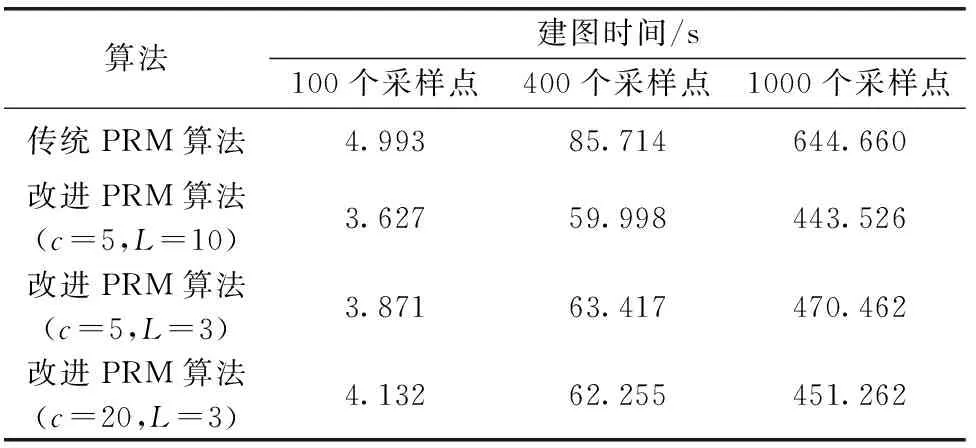
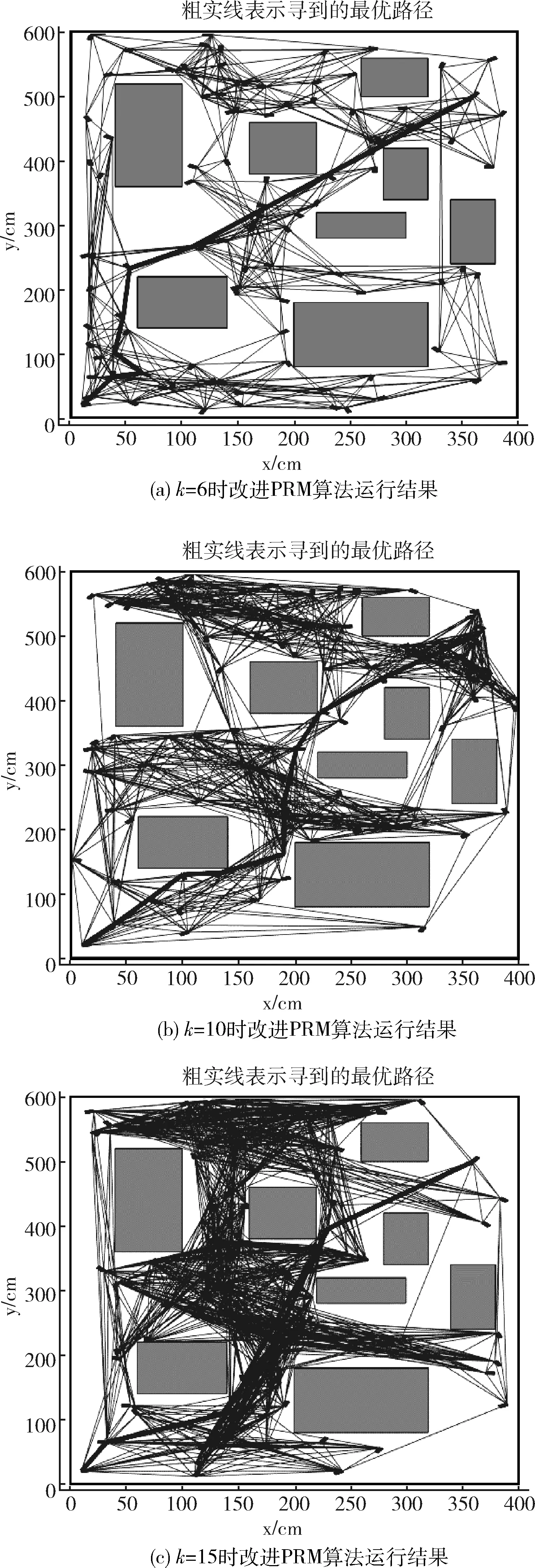
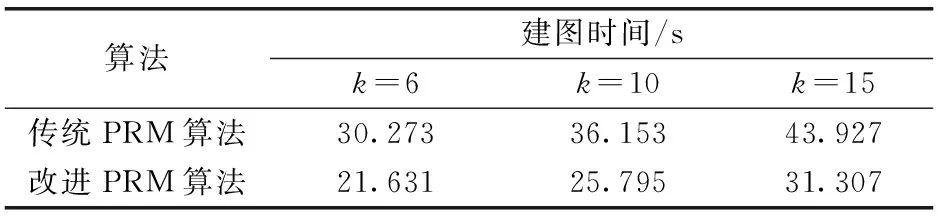
(2)根據(jù)一個度量選取k個q點的近鄰點,近鄰點選取的度量指與q點的距離在一定的范圍即N0={n∈N│L(q,q′) (1) 式中:ωMi∈R,是權(quán)重常數(shù)。 (3)使用局部規(guī)劃器檢測q點和k個近鄰點是否存在路徑,如果有,相互連接形成機器人的移動路徑,并且經(jīng)過碰撞檢測后刪減掉與障礙物相交的路徑。 (4)生成的路徑加入到集合E中。最終所有隨機采樣點相連成一個無向路徑圖。 算法1:傳統(tǒng)PRM偽代碼 Constructs the roadmapG=(V,E) V←? E←? repeat q←sampled configuration fromCfree V=V∪{q} Nq←knearest neighbor configurations ofqchosen fromV for allq′inNqdo ifqandq′are not in the same component of the roadmap then if local planner finds a path betweenqandq′then E←E{(q,q′)} until there are enough configurations inV returnG 從算法1可以看出PRM算法在每次向路徑圖中添加新節(jié)點時必定要找到一組最近的相鄰節(jié)點。然后通過局部規(guī)劃器尋找新節(jié)點到每個近鄰點的自由路徑。因此使用PRM算法時,大部分工作是在無向路徑圖的構(gòu)建。 局部規(guī)劃所做的碰撞檢查是構(gòu)建無向路徑圖時最耗時的部分,也是PRM算法最耗時的部分之一。因此,不可能檢查所有路徑是否發(fā)生碰撞,而是選擇一組相鄰節(jié)點調(diào)用一次局部規(guī)劃。 最近鄰搜索是PRM算法的重要組成部分,因為對于每個采樣點,都需要搜索一組最近鄰節(jié)點。當(dāng)路線圖規(guī)模增加時,這會成為一個非常耗時的操作。所以鄰域搜索和碰撞檢測是PRM規(guī)劃的瓶頸之一。當(dāng)工作空間環(huán)境復(fù)雜,尤其是高維空間中,更是成為性能的主要瓶頸。 PRM是概率完備且不最優(yōu)算法,但在PRM中通常使用精確的最近鄰搜索。這非常耗時,尤其處理復(fù)雜環(huán)境下大量數(shù)據(jù)時更加耗時。近似最近鄰查找(approximate nearest neighbor,ANN)可以很好加速查找過程,提高算法效率。而局部敏感哈希(locality-sensitive hashing,LSH)便是屬于近似最近鄰查找的一種。通過使用局部敏感哈希搜索算法來加速PRM算法中無向路徑圖的建立,從而提高PRM算法運行速度。改進PRM算法流程如圖2所示。 圖2 PRM算法流程 LSH的基本思想:基于原始數(shù)據(jù)空間中相鄰的數(shù)據(jù)經(jīng)過同一個映射變換之后,處于相鄰區(qū)域的概率仍然較大,選取一些具有上述性質(zhì)的函數(shù)來作為哈希函數(shù),使得相鄰的數(shù)據(jù)映射后處在哈希表的同一個位置,更容易搜索與目標(biāo)數(shù)據(jù)相似的數(shù)據(jù)集。當(dāng)哈希函數(shù)h滿足以下的兩個條件,稱h為局部敏感哈希函數(shù): (1)如果L(q1,q2) (2)如果L(q1,q2)>d2,則P[h(q1)=h(q2)]≤p2; 其中,d1,d2,p1,p2是給定的常數(shù),L(q1,q2)表示q1,q2兩點之間的相似程度,P[h(q1)=h(q2)]表示q1,q2兩映射的哈希值相同的概率。 通過選取的哈希函數(shù)h映射變換能夠?qū)⒃紨?shù)據(jù)集劃分為若干較小的子集,每個子集中元素個數(shù)較小且相鄰。因而把超大集合內(nèi)查找相鄰元素變成了在一個小集合內(nèi)查找相鄰元素,計算量因此大大下降。該方法不能保證精確找到與某個數(shù)據(jù)最相似(距離最近)的一個數(shù)據(jù)或多個數(shù)據(jù),但是會以很高的概率返回非常好的近似值。 LSH方法基于包含多個存儲桶的哈希表。每個存儲桶都和唯一的哈希值關(guān)聯(lián),并且使用哈希函數(shù)h計算移動機器人工作空間M中點的哈希值。通過函數(shù)h的映射,將M中所有點存儲到存儲桶中,一個存儲桶中包含多個點。當(dāng)搜索鄰近查詢點q∈M的一組點,首先計算q的哈希值。從得到哈希值指示的存儲桶中檢索所有點。哈希表可以實現(xiàn)為非常有效地工作,這意味著在實踐中可以快速完成這些點的搜索。但是,不確定所找到點是否包含q的最近鄰居。通過使用多個哈希表,可以增加該方法找到最近點的概率。創(chuàng)建包含多個哈希表的L表,并且為每個哈希表使用一個不同哈希函數(shù)。算法2展示了如何將新點添加到每個表中。 算法2:哈希表中添加點偽代碼 (1)fori=1,2,…,Ldo (2)h←hash value forqinith hash table (3)b←bucket identified by a valueh fromith hash table (4)Add pointqto the bucketb 使用LSH檢索鄰近點時,首先從每個表中獲取點,然后將它們組合在一起,如算法3所示。 算法3:偽代碼 Returns k nearest nodes to a query pointq (1)V←? (2)fori=1,2,…,Ldo (3)h←hash value forqinith hash table (4)b←bucket identified by a value h fromith hash table (5)V′←all nodes from bucketb (6)V←V∪V′ (7)returnV LSH算法中,哈希函數(shù)的選擇尤其重要,哈希函數(shù)選擇條件:如果兩個數(shù)據(jù)點彼此相鄰,則經(jīng)過哈希映射變換后這兩個數(shù)據(jù)點很有可能返回相同值。這意味著哈希函數(shù)將保留位置信息,并且彼此鄰近的點可能會存儲在哈希表同一存儲桶中。常見滿足不同距離度量方式的局部敏感哈希函數(shù)有:基于歐氏距離哈希函數(shù)、基于余弦距離哈希函數(shù)、基于Jaccard距離哈希函數(shù)、基于漢明距離哈希函數(shù)、基于質(zhì)心哈希函數(shù)等等。而基于質(zhì)心哈希算法[13]易于實現(xiàn),并且可以擴展以滿足PRM算法的需求。 在基于質(zhì)心的哈希函數(shù)中,開始時會生成一組質(zhì)心c。質(zhì)心屬于移動機器人工作空間M,通過計算從q到每個質(zhì)心的距離,然后選擇最接近的質(zhì)心,任意點q∈M可以與其中一個質(zhì)心相關(guān)聯(lián)。這實際上將空間M劃分為c個分區(qū)。這種劃分也可以被認為是Voronoi圖,其中每個質(zhì)心對應(yīng)一個Voronoi單元。因此哈希函數(shù)h可以定義:取得一個點,計算它屬于哪個Voronoi單元,返回與該單元關(guān)聯(lián)的哈希值。使用此哈希函數(shù),存儲桶數(shù)量將與質(zhì)心數(shù)量相同。 在圖3中以二維方式說明了基于質(zhì)心的哈希。在圖3(a)~圖3(c)中,出示了3組不同的質(zhì)心和相應(yīng)Voronoi單元。質(zhì)心用小點標(biāo)記,中間以小圓表示查詢點q,q所屬單元格用灰色標(biāo)記。要為q檢索一組最鄰近的點,從這3個有標(biāo)記的Voronoi單元檢索即可。 圖3 基于質(zhì)心的哈希 基于質(zhì)心的敏感哈希算法要在PRM算法中應(yīng)用進行改進PRM算法,需要解決兩個問題:如何選擇質(zhì)心;如何處理路線圖中只有幾個節(jié)點的情況。 第一個問題是選擇質(zhì)心。最簡單的方法是生成c個隨機點用作質(zhì)心。這是可行的,但會忽略從環(huán)境中得到的一些信息。在此基礎(chǔ)上提出了一種考慮靜態(tài)障礙物的方法。初始化質(zhì)心的方法如算法4所示。假設(shè)路線圖一開始是空的,這意味著不可能使用關(guān)于現(xiàn)有路線圖信息。因此,該方法隨機選擇質(zhì)心,但要求所有質(zhì)心都位于自由組態(tài)空間Cfree。為了在空間中更均勻地分布質(zhì)心,可以使用一些低差分序列來生成質(zhì)心。在改進PRM方法中應(yīng)該注意,如果c大于1,那么L也必須大于1。否則,路線圖將在每個Voronoi單元中單獨構(gòu)建,不會連接在一起。通過增加L,單元之間會有重疊,有助于路線圖連接起來。 算法4:用質(zhì)心c初始化L哈希表偽代碼 (1)fori=1,2,…,Ldo (2)P←? (3)fori=1,2,…,cdo (4)P←a random free configuration (5)P=P∪{q} (6)Associate centroidsPwithith hash table 第二個問題是路線圖只有幾個節(jié)點的情況。例如,為一個查詢點q檢索k個最近鄰,而路線圖只有k個節(jié)點,那么應(yīng)該返回路線圖中所有節(jié)點。但是,算法3中所示方法可能只返回所有節(jié)點的一小部分,因為它只返回某些存儲桶中節(jié)點。算法5給出了一種改進方法。如果路線圖的節(jié)點數(shù)少于k個,將立即返回所有節(jié)點,否則將確保始終返回k個最近的節(jié)點。 算法5:偽代碼 (1)if|R|≤kthen (2)returnR (3)V←? (4)fori=1,2,…,Ldo (5)h←hash value forqinithhash table (6)b←bucket identified by a valuehfromith hash table (7)V′←all nodes from bucketb (8)V←V∪V′ (9)if|V|≤kthen (10)returnknearest nodes toqfromR (11)else (12)returnknearest nodes toqfromV 為了驗證改進后PRM算法效果,使用matlab2017b仿真軟件對改進PRM算法進行仿真實驗,仿真實驗中設(shè)置了400×600大小的地圖,單位設(shè)置為厘米(cm),場景中方塊表示障礙物,淺色細線代表可行路徑,深黑色線代表最優(yōu)路徑。設(shè)置機器人起始點坐標(biāo)為[10,20],目標(biāo)點為[360,500],在地圖中選擇隨機點數(shù)分別為100、400、1000,此時最近鄰數(shù)目k設(shè)置為6,生成的無向路徑圖和如圖4(a)~圖4(c)所示。圖4中顯示出,隨著隨機點數(shù)增加無向路徑圖構(gòu)建更為詳細。 圖4 改進PRM算法生成的無向路徑 無向路徑圖構(gòu)建完成后,使用搜索算法進行最優(yōu)路徑查詢,生成一條由起始點至目標(biāo)點的最優(yōu)路徑。圖5顯示的是使用改進PRM算法得出的移動機器人避障的最優(yōu)路徑,圖中粗實線表示搜索出的機器人移動的最優(yōu)路徑。對比圖1(b)和圖5,改進PRM算法得出的最優(yōu)路徑基本與傳統(tǒng)PRM算法得出的路徑相同,這是因為加入LSH搜索算法的改進PRM算法僅加速了構(gòu)建無向路徑圖的速度,所以得到最優(yōu)路徑的質(zhì)量并沒有下降。 圖5 改進PRM算法生成的避障路徑 在仿真實驗中,為了減少因PRM算法隨機性而產(chǎn)生的誤差,對傳統(tǒng)PRM算法和改進PRM算法分別進行了40次實驗取平均值,采樣點的近鄰點個數(shù)k設(shè)置為6,隨機采樣點數(shù)分別設(shè)置為100、400、1000。為了找到合適的參數(shù)c和參數(shù)L的值,在改進PRM算法中給c和L設(shè)定不同的值。實驗結(jié)果見表1。 表1 一般環(huán)境下改進算法與傳統(tǒng)算法實驗數(shù)據(jù)對比 由表1的數(shù)據(jù)可以得出:相對于傳統(tǒng)PRM算法改進后PRM算法在建立無向路徑圖的時間上減少了27.36%~33.27%,且隨著隨機采樣點的數(shù)目增多,改進后的PRM算法效率逐漸增加。當(dāng)采樣點數(shù)目相對不多時質(zhì)心數(shù)目越多,反而算法運行時間增大。隨著采樣點增多,質(zhì)心數(shù)目相對增加時更有利于減少算法時間。哈希表數(shù)目相對增多有利于算法提高效率。 同一般環(huán)境相同的仿真環(huán)境下,在地圖中添加8個障礙物。實驗步驟和一般條件下實驗步驟相同,隨機采樣點數(shù)設(shè)置為100,c設(shè)置為5,L設(shè)置為3。當(dāng)近鄰點數(shù)目k設(shè)置為6、10、15時,對應(yīng)的結(jié)果如圖6(a)~圖6(c)所示。通過對比可以得知,隨著k值增大無向路徑圖變得更加完備,而規(guī)劃的路徑也更優(yōu)。 圖6 改進PRM算法運行結(jié)果 實驗結(jié)果顯示,在多障礙物的復(fù)雜地圖環(huán)境下,改進PRM算法相比較傳統(tǒng)PRM算法,在建立無向路徑圖時間上減少了28.61%。隨著k值的增大構(gòu)建無向路徑圖的時間也有所增加。實驗數(shù)據(jù)見表2。 表2 多障礙物環(huán)境下改進算法與傳統(tǒng)算法實驗數(shù)據(jù)對比 仿真環(huán)境不變,在地圖中添加障礙物構(gòu)建一個狹窄環(huán)境,設(shè)置機器人起始點坐標(biāo)為[10,20],目標(biāo)點為[360,500]。隨機采樣點數(shù)設(shè)置為200,c設(shè)置為5,L設(shè)置為3,近鄰點數(shù)目k設(shè)置為6。實驗的步驟和一般條件下的實驗步驟相同。使用改進PRM算法最終生成的最優(yōu)路徑如圖7所示。 圖7 改進PRM算法運行結(jié)果 因為PRM算法的隨機性,進行50次仿真實驗。實驗結(jié)果表明,在狹窄環(huán)境下,改進PRM算法時間減少了27.57%~27.71%。50次狹窄環(huán)境下的仿真中,傳統(tǒng)PRM算法出現(xiàn)了23次最優(yōu)路徑無解的狀況,改進PRM算法也出現(xiàn)了23次最優(yōu)路徑無解的結(jié)果。因為在狹窄環(huán)境下,隨機點灑在狹窄通道的幾率會減小,從而構(gòu)建出的無向路徑圖會有缺失,在在線搜索環(huán)節(jié)就會搜尋不到從起始點至目標(biāo)點的最優(yōu)路徑。 本文基于傳統(tǒng)的PRM算法,使用基于質(zhì)心的局部敏感哈希算法加速無向路徑圖的構(gòu)建,從而減少了PRM算法的運行時間,提高了PRM算法的運行效率,且搜索的最優(yōu)路徑質(zhì)量并沒有下降。并通過移動機器人在一般環(huán)境地圖和多障礙物環(huán)境地圖以及狹窄環(huán)境地圖的仿真實驗,驗證了改進PRM算法確實節(jié)省了算法在建立無向路徑圖環(huán)節(jié)的時間,提高了算法運行速度。2 搜索算法優(yōu)化
2.1 局部敏感哈希
2.2 基于質(zhì)心的哈希函數(shù)
3 仿真結(jié)果與分析
3.1 一般環(huán)境下仿真
3.2 多障礙物環(huán)境下仿真
3.3 狹窄環(huán)境下仿真

4 結(jié)束語
猜你喜歡
北京航空航天大學(xué)學(xué)報(2022年6期)2022-07-02 01:59:12四川輕化工大學(xué)學(xué)報(自然科學(xué)版)(2021年3期)2021-08-30 06:37:02中老年保健(2021年12期)2021-08-24 03:30:40中國傳媒大學(xué)學(xué)報(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00中國生殖健康(2020年6期)2020-02-01 06:28:50新世紀(jì)智能(英語備考)(2019年12期)2020-01-13 06:07:18中國生殖健康(2019年11期)2019-01-07 01:28:02中國生殖健康(2018年6期)2018-11-06 07:09:28制造技術(shù)與機床(2017年3期)2017-06-23 08:11:21智能系統(tǒng)學(xué)報(2015年4期)2015-12-27 09:38:35