基于改進的NC-HOG特征的工程車車型自動識別算法
2021-11-20 01:57:04呂俊杰劉俊勇劉友波
計算機工程與設計 2021年11期
關鍵詞:特征
羅 亮,呂俊杰,李 濤,張 勁,劉俊勇+,劉友波
(1.國家電網四川省電力公司 阿壩供電公司 建設部,四川 阿壩 623200;2.國家電網四川省電力公司 天府新區供電公司,四川 成都 610041;3.四川大學 電氣工程學院,四川 成都 610065)
0 引 言
車型識別技術在交通管控、停車場管理等方面發揮了重要的作用,但受實際條件與識別算法的限制,沒有哪一種方法能適用于任何場景[1,2]。針對施工工地,工程車輛的有效管理是保證施工效率的首要前提,但現有的監管方式大多依賴人力,無法保證監管的效率,因此車型識別技術為工地管理提供了新的解決辦法。
車型的識別方法主要針對于特定環境,適應性較差。目前,應用場景主要分為兩大類:①基于交通環境,Honghui Dong等[3]提出了一種基于原始磁信號的短時方差序列的車輛檢測算法,從每個車輛信號中提取42維特征,用梯度樹Boosting算法對車型進行識別;張鵬等[4-6]提取交通視頻中車輛的SIFT(scale-invariant feature transform)作為特征,在SVM(support vector machine)分類器中完成車型分類;陳立潮等[7]將循環神經網絡與卷積神經網絡融合并嵌入二級框架,改進了傳統卷積模型使得對全局特征更為敏感;Azam S等[8,9]利用Faster-RCNN算法對車輛的不同方向進行檢測,與傳統的RCNN相比,檢測速度加快,檢測區域更為精確;張志永[10]使用膠囊網絡算法與Faster RCNN結構實現車型識別,實驗結果表明,在BIT-vehicle數據集中5種車型的平均識別率達到了91.27%。②基于停車場等靜態環境,Tschentscher 等[11]通過提取車位高斯差分DOG(difference of Gaussian)特征與顏色直方圖作為特征向量,采用SVM分類器對其進行分類訓練,實現空閑車位的檢測;Amit Kumar等[12,13]根據車輛的高度和長度等輪廓信息進行車型分類;此外邵宇[2]采用傳統的HOG(histogram of oriented gridients)特征,利用背景差分法對礦場監控視頻中挖掘機進行檢測識別,但由于樣本過小且識別對象單一,適用性較差;黃俊潔[14]使用深度學習方法,在Fast R-CNN部分引入在線難例挖掘算法,利用工地電桿攝像頭拍攝的圖像作為訓練集,實驗結果表明對工程車有較好的識別率,缺點是需要使用大量的數據樣本進行訓練,實用性仍有局限。
盡管目前已有針對于車型識別的方法,但多是基于交通與停車場等監控覆蓋較為全面的場景,由于施工工地地形復雜、監控難以覆蓋等原因,相關研究仍比較罕見且局限性較大。
基于以上背景,本文提出一種用于施工工地的基于改進的HOG特征的工程車車型識別算法。首先利用RPN(region proposal network)深度學習網絡[15]對工程車輛目標區域進行自動分割;其次提出自然度保留的圖像增強方法對工程車的暗部細節進行增強,并結合顏色不變性處理去除地面陰影,使得在該處理圖像上提取的HOG特征能更加完整描述工程車的真實輪廓;然后將自然度保留增強圖像的NPE-HOG特征和陰影去除圖像的CIV-HOG特征融合得到的NC-HOG特征,結合一對一支持向量機實現對壓路機、挖掘機、裝載機3類工程車輛的自動識別,有助于后續對各類工程車在工地填壓情況的監測。
1 基于改進的車型自動識別算法
本文采用無人機采集航拍視頻序列,使用RPN深度學習網絡對工程車輛在圖像中進行了檢測與標記,自動分割車輛的目標候選區域;然后對車輛目標區域進行自然度保留圖像增強處理并提取NPE-HOG特征,同時進行顏色不變性處理并提取CIV-HOG特征,將兩者融合為NC-HOG特征,結合SVM對特征分類提取的先驗模型進行分類,區分壓路機、挖掘機、裝載機3類工程車輛,實現了對3類工程車輛的自動識別。圖1是本文提出的車型自動識別算法的流程。

圖1 車型自動識別系統的流程
1.1 基于RPN深度學習網絡架構的復雜環境下工程車輛ROI分割算法
由于利用傳統的基于公路環境的車輛檢測方法不能對工地環境中的工程車進行識別,而且傳統車輛檢測方法多是基于車載攝像頭或道路監控錄像設備錄制的視頻進行識別的。本文基于RPN深度學習網絡[15]來實現對工程車輛的分割,得到了較好的識別標注效果,為后續對車型的分類識別奠定了基礎。圖2是RPN。

圖2 RPN
RPN以任意大小的圖像作為輸入,輸出一組矩形的目標提議,每個提議都有一個目標得分。為了生成區域提議,在VGG-16最后的共享卷積層輸出的卷積特征圖后面設立了一個小型卷積神經網絡。這個小型卷積神經網絡將VGG-16 最后的共享卷積層輸出的卷積特征圖作為輸入,使用3*3的卷積核,卷積核個數為512,進行卷積操作,后面再加一個ReLU激活函數。最后特征被輸入到兩個子全連接層:一個邊界框回歸層和一個邊界框分類層,其中子全連接層是用1×1卷積來實現的,邊界框回歸層的卷積核個數為4k,邊界框分類層的卷積核個數為2k,k的值為每個位置可能提議的最大數目,然后使用3個尺度和3個長寬比,在每個滑動位置產生k=9個錨點。最終輸出的建議是邊界框回歸層與邊界框分類層通過非極大值抑制來消除冗余的邊界框,從而找到最佳的工程車輛的目標邊界框。圖3是利用RPN算法對一個視頻幀的處理結果,自動分割出3類工程車輛ROI區域。

圖3 工程車輛ROI區域自動分割
1.2 本文提出的工程車車輛NC_HOG特征提取
對于挖掘機、壓路機和裝載機3種工程車車型,三者最大的區別在于其形狀特征不同,而在提取特征過程中,工程車地面陰影邊緣可能會被當作工程車形狀特征的一部分,從而影響自動識別效果。本文提出了一種結合自然度保留圖像增強處理和顏色不變性處理的工程車車型特征提取算法,該算法步驟如圖4所示。

圖4 工程車車型特征NC_HOC提取算法流程
在提取工程車形狀特征前,對工程車圖像進行基于自然度保留的圖像增強處理,提取NPE_HOG特征;同時對工程車圖像進行基于顏色不變性的陰影去除處理,提取CIV_HOG特征。然后根據兩種圖像處理的優缺點進行特征拼接融合,最后提取NC_HOG特征,如式(1)所示
(1)
其中
N=length(NPE_HOG)=length(CIV_HOG)
(2)
由于自然度保留圖像增強處理過程中改變了原始圖像的光照,若直接對自然度保留圖像增強后的圖像EOc(x,y) 進行陰影去除處理是不準確的,所以基于自然度保留的圖像增強處理和基于顏色不變性的陰影去除處理需要對原始圖像O(x,y) 同時進行,分別得到暗部細節增強圖像EOc(x,y) 和無陰影圖像COc(x,y)。 對兩幅圖像同時提取HOG特征,分別得到NPE_HOG特征和CIV_HOG特征,其計算過程如下:
分別將EOc(x,y) 和COc(x,y) 進行尺寸變換和灰度轉換,得到256×256灰度圖像GEOc(x,y) 和GCOc(x,y)。 計算灰度圖像每個像素點 (x,y) 的梯度
Gx(x,y)=V(x+1,y)-V(x-1,y)
(3)
Gy(x,y)=V(x,y+1)-V(x,y-1)
(4)
其中,Gx(x,y) 和Gy(x,y) 表示像素點 (x,y) 的水平方向梯度和垂直方向梯度,V(x,y) 是像素點 (x,y) 的像素值。根據式(5)、式(6),計算像素點 (x,y) 的梯度幅值G(x,y) 和梯度方向α(x,y)
(5)
(6)
自然度保留圖像增強圖像EOc(x,y) 的梯度幅值和梯度方向分別為GE(x,y) 和αE(x,y), 無陰影圖像COc(x,y) 的梯度幅值和梯度方向分別為Gc(x,y) 和αc(x,y)。將自然度保留圖像增強圖像和無陰影圖像的梯度幅值按照8×8像素/細胞,2×2細胞/塊組合HOG特征向量,得到NPE_HOG特征和CIV_HOG特征。圖5(a)是原圖像經過自然度保留圖像增強后提取的HOG圖像,圖5(b)是原圖像去除陰影后提取的HOG圖像,圖5(c)是經過特征融合算法處理后的HOG圖像,該圖像既保留了圖像細節,又去除了陰影。

圖5 基于不同處理方法的車輛HOG圖像
1.2.1 基于自然細節保留的圖像增強
HOG最早由Navneet提出,通過計算和統計圖像局部區域的梯度方向直方圖得到。為了減少光照因素的影響,有效降低圖像局部的陰影和光照變化,HOG算法首先將圖像轉換到標準化Gamma空間,即使用Gamma壓縮式(7)對原始圖像進行壓縮
G(x,y)=O(x,y)γ
(7)
其中,O(x,y) 為原始圖像,γ為校正因子,范圍為(0,1),G(x,y) 為原始圖像經Gamma壓縮后得到的圖像。
而在實際應用中,不同圖像需設置不同的γ值,該種方法不具備自適應性。本文針對光照處理,提出一種可保留原圖像自然度和細節的圖像增強方法,可改善圖像局部變化和保留強度的整體趨勢,增強圖像細節的同時也能保留自然色彩。NPE自然度保留圖像增強方法的流程如圖6 所示。
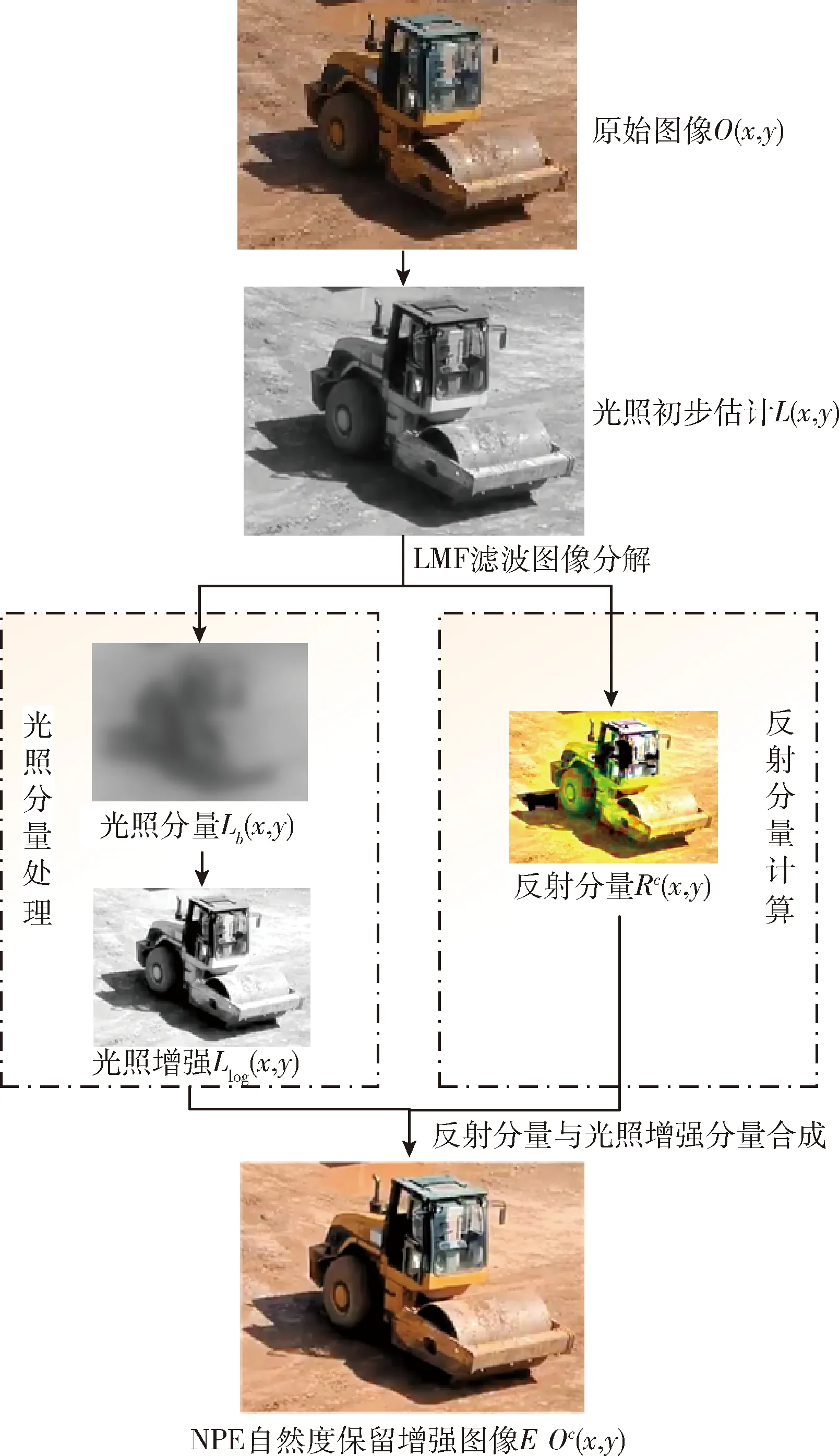
圖6 NPE自然度保留圖像增強方法流程
(1)基于光照均值濾波的圖像分解
圖像可被分解到不同的特征空間,全局自然度空間包含低頻信息和光照分量I(x,y), 局部細節空間包含高頻信息和反射分量R(x,y)。 根據Retinex模型[16],原始圖像O(x,y) 是反射分量和光照分量的乘積
O(x,y)=R(x,y)·I(x,y)
(8)
大部分基于Retinex理論[16]將原圖的3個顏色分量中的最大亮度分量L(x,y) 作為光照初步估計,其操作可表示為
(9)
其中,Oc(x,y) 表征原始圖像O(x,y) 在 (x,y) 點處像素R、G、B三顏色分量的向量值。
然而,對于光照非歸一化圖像而言,圖像光照強度與全局最大響應無關,而與局部最大響應有關。因此本文將改進的局部Max-RGB算法作為初步光照估計,該算法假設圖像局部區域的光照強度為常數,則根據式(10)計算圖像的初步光照分量
(10)
研究表明,為了更加精準地估計光照分量初值,Ω選擇15×15的局部區域[17],在此區域內光照強度為常量。
大部分光照估計是通過對最大分量進行低通濾波、Guassian濾波或Bilateral濾波[18-20],從而得到光照分量的,但這類濾波會導致光照分量比反射光線更暗。本文基于每個像素的光照是局部最大值的假設[21],提出了一種光照濾波方法來進行光照分量的估計,考慮了反射率的變化范圍,避免過度增強。光照均值濾波(lightness mean filter,LMF)能更好地估計比真實光照更亮的圖像邊緣周圍的暗光照區域,可將反射率限制在[0,1]范圍內。
將像素P(x,y) 的鄰居設置為八連通性的九像素單元NP(x,y)
NP(x,y)={P(x-1,y-1),P(x-1,y),
P(x-1,y+1),P(x,y-1),P(x,y),
P(x,y+1),P(x+1,y-1),P(x+1,y),
P(x+1,y+1)}
(11)
定義一個像素值k為像素點Pk(x,y), 將該像素的九像素單元內像素值為l的像素個數記為NPk,l(x,y), 統計整張圖像上的像素分布,中心點像素值為k, 其8鄰域中像素值為l的頻率用Q′(k,l), 可用式(12)計算得到
(12)
由于Q′(k,l) 受圖像噪聲影響且變化粗糙,本文采用局部平均頻率Q(k,l)
(13)
其中,w是滑動窗尺寸,需要設置在灰度級范圍內
w=(max(P(x,y))-min(P(x,y)))/32
(14)
將光照均值濾波 (LMF[·]) 定義為對相鄰像素根據局部平均頻率Q(k,l) 進行正相關加權平均的操作

(15)
其中,Ω是15×15的局部區域,單元操作函數U(x,y) 只計算比中心像素更亮的相鄰像素,歸一化函數H(x,y) 保證所有像素權重和為1
H(x,y)=∑(i,j)∈Ω(Q(P(x,y),P(i,j))·
U(G(i,j),P(x,y)))
(16)
用LMF[·] 將式(10)的光照初步估計進行優化得到精確的光照分量Lb(x,y)

(17)
由于原始圖像未做歸一化處理,其R、G、B這3個顏色通道應該具有相同的光照分量。根據Retinex理論的式(8),每一顏色通道的反射分量Rc(x,y) 可由式(18)求得
(18)
(2)光照分量增強
光照變化范圍太大不利于細節顯示,所以將原圖分解為光照分量和反射分量后,需將光照分量的亮度調節到足夠大并且要遵從原始的亮度順序,這樣操作能增強細節同時保留了圖像原始的自然度。由于直方圖規定化操作可保留原始的亮度順序,本文采用log形狀的直方圖進行光照映射
Llog(x,y)=log(Lb(x,y)+μ)(μ=1)
(19)
(3)反射分量與光照增強分量的合成
將反射分量Rc(x,y) 和增強后的光照分量Llog(x,y) 合成可得到最后的自然度保留圖像增強圖像
EOc(x,y)=Rc(x,y)×Llog(x,y)
(20)
由于增強光照分量圖中不同局部區域的亮度順序與原始圖像的亮度順序一致,反射率為1的像素的相對順序也并沒有發生改變。并且自然度保留圖像增強圖像的3個顏色通道比值與原始圖像的比值保持一致,所以原始圖像的色調得以保留。
1.2.2 基于顏色不變性的工程車陰影去除
經過上一步自然度保留圖像增強后的圖像的暗部細節得到了亮度調整,但其陰影邊緣依然存在,工程車陰影的梯度邊緣明顯,將會影響工程車的形狀特征,所以這一步基于圖像的顏色不變性對陰影進行消除。成像設備在獲取圖像時,只能記錄物體在不同光源下所呈現的顏色,而不是物體本身的固有色。顏色不變性計算可消除不同光照對圖像顏色的影響,從而得到與光照無關的物體表面的顏色特性。場景中的陰影具有表面強度改變大而色度幾乎不變的特性,所以可利用顏色不變性對陰影進行去除。
首先需要獲取顏色不變分量,如下式
(21)
(22)
(23)
其中,r,g,b是原始圖像的RGB這3個顏色通量分量,r′,g′,b′是3個通道的顏色不變圖。將處理過的r′,g′,b′重新合成為新的彩色圖像,即
(24)
圖7展示了顏色不變性處理的效果,圖7(a)是帶有陰影的壓路機原始圖像,圖7(b)是使用式(21)~式(23)處理后的去除影子的顏色不變圖,圖7(c)~圖7(e) 分別是紅色、綠色和藍色通道的顏色不變分量。

圖7 顏色不變性處理效果
1.3 SVM分類器
SVM[22]是建立在統計學習理論上的方法,最早由Cortes和Vapnik提出,通過選擇一組特征子集,使目標函數對特征子集的劃分等同于對整體數據集的劃分。訓練結果取決于樣本的選取,本文選取3種車型圖像作為樣本,提取圖像的NC_HOG特征向量作為SVM的輸入數據,進行分類器的訓練,將其轉化為能直接用于檢測的檢測算子。SVM是一個二值分類器,在處理多類問題時需要構造合適的多類分類器,本文采用一對一支持向量機,即任意兩類樣本之間構建一個SVM,因此k個樣本就需要k(k-1)/2個SVM。
2 實驗結果與分析
2.1 工地車車型數據庫
本文采用大疆無人機在國家電網四川某施工工地進行數據采集,現場環境穩定,除必要的施工車輛作業,沒有其它較大的人為干擾,保持相機光學參數一致。采用人工標定工程車區域作為標準,建立總共5200張帶有標準標簽的包含不同角度不同位置的3種工程車標準數據庫。其中壓路機2100張,挖掘機1700張,裝載機1400張。
2.2 基于RPN深度學習算法的工程車輛ROI區域提取結果與分析
本文使用大疆無人機設備對工地施工環境錄制了視頻,針對不同場景的視頻做了分類。對視頻分幀后進行目標車輛的自動檢測,并保存檢測標記出的工程車輛位置坐標。為了對工程車輛自動檢測效果進行評估,采取多人標記取平均的方法對同批數據進行手動標記,將圖像中工程車的邊界范圍以坐標點形式進行存儲。通過基于RPN深度學習算法自動標記的工程車輛的中心點坐標與手動標記的該車輛的中心點坐標的對比,對該算法自動檢測結果進行判定,最終得到每一工程車車型的標記正確率。
假設原始圖像上手動標記的車輛邊界范圍坐標是 (xi,yi), 其中i=1,2,3,4。 則有中心點坐標
(25)
基于RPN深度學習算法在原始圖像上自動檢測出目標工程車輛的標記框,用類似方式計算出O′(u′,v′), 若基于RPN深度學習算法標記產生的O′(u′,v′) 與手動標記產生的O(u,v) 滿足關系式(26),則基于RPN深度學習算法的自動標記結果正確,不滿足則為標記有誤
(26)
本實驗基于RPN深度學習算法,對實驗數據庫中的所有視頻圖像幀進行工程車輛的自動標記。針對3個不同場景選取了部分代表圖像,其標記結果如圖8所示。

圖8 針對部分圖像的工程車標記結果
分析圖8可知,部分圖像不能夠得到與真實情況完全相同的自動標記結果,會存在標記過多或過少的情況。本文正是根據自動標記的定位結果,提出基于保留自然度的圖像增強與顏色不變性處理的車型識別特征提取算法,并結合SVM分類器實現工程車車型的自動識別。
本文基于RPN深度學習算法對3種類型的工程車輛(壓路機、挖掘機、裝載機)進行自動檢測與區域提取,對比同批數據庫的手動標記結果,分別計算每類工程車輛的自動檢測效果,得到如表1所示正確率。標記圖像3類工程車一共5200張,其中壓路機2100張,挖掘機1700張,裝載機1400張。
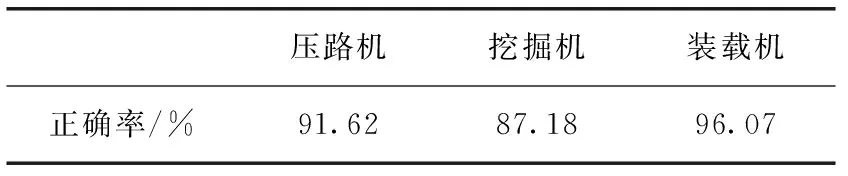
表1 工程車輛ROI檢測符合要求的正確率
由表1可知,基于RPN深度學習算法自動標記3類工程車輛的正確率均在85%以上,基本能夠實現工程車的自動識別。
2.3 光照處理效果對比分析
綜合實際的施工環境和天氣,大部分施工時間集中在天氣較好時期,無論是傳統的監控攝像還是無人機,采集到的施工現場數據都不可避免地存在地面陰影。嚴重的背光會影響工程車的真實輪廓,導致暗部的車型輪廓邊緣與地面陰影邊緣發生粘連。所以本文針對HOG特征提取的第一步光照處理進行了改進,獲取更多的背光暗部細節,圖9展示了不同光照處理方法對于不同車型的處理結果。圖9(a)是原圖,圖9(b)是Gamma校正效果圖,圖9(c) 是多尺度圖像增強效果圖,與原圖相比Gamma校正和多尺度圖像增強后,陰影部分的細節展現得到提升,但非陰影區域尤其是直接光照區域被過度增強了,且對比圖9(c)發現該圖像增強效果并不穩定,容易造成圖像全局過度增強,而導致其本身車身的輪廓細節區分不明顯。圖9(d)是本文提出的自然度保留圖像增強處理效果圖。與原圖相比其更多展現了陰影區域的細節,能明顯區分出輪胎與陰影的交界線。與多尺度增強圖9(c)相比,其自然度保留圖像增強效果更自然,是因為本文的方法僅僅增加了陰影部分的光照強度,對于其反射分量并沒有改變,其3個顏色通道比值也與原圖比值保持一致,所以地面和車身區域的原有色彩得以保留。

圖9 不同車型的不同光照處理方法效果
2.4 梯度幅值輪廓圖結果與分析
對于挖掘機、壓路機和裝載機3種工程車車型,其三者最顯著的區別在于形狀特征,本文使用梯度的方向分布進行邊緣特征描述,在梯度計算前分別進行了自然度保留圖像增強、陰影去除等處理。
圖10(a)是壓路機工程車的側面圖,在無光照處理下直接使用原圖的灰度圖進行梯度幅值計算結果如圖10(b)所示,圖10(c)是進行Gamma校正后再計算梯度幅值的結果,兩者對比可明顯發現,Gamma校正后的梯度幅值能大致描述工程車的輪廓,所以梯度計算前進行一定的光照處理是必要的。圖10(d)是使用本文提出的自然度保留圖像增強方法處理后再計算梯度幅值的結果圖,與Gamma校正的圖10(c)對比可發現圖10(d)對背光陰影中輪胎部分的輪廓細節描述比圖10(c)更細致,然而兩種方法都沒有去除地面的陰影輪廓。為避免陰影輪廓對工程車形狀輪廓的影響,本文利用顏色不變性對原圖進行了陰影去除處理,圖10(e)是陰影去除后的梯度幅值圖,陰影輪廓已明顯被去除。但由于車頂和滾筒反射了陽光,使得車頂和滾筒輪廓與陰影一起被消除了,導致工程車上半部分的輪廓并不完整。考慮到無人機的數據采集角度和施工時的自然環境,工程車的陰影總是出現在圖像的下半部分,所以結合了自然度保留圖像增強和顏色不變性處理,將圖10(d)的上半部分梯度幅值和圖10(e)的下半部分梯度幅值進行了拼接得到圖10(f)最后的工程車梯度輪廓圖。由本文方法得到的工程車梯度輪廓圖10(e)與傳統HOG方法得到的梯度輪廓圖10(c)相比,可明顯看出本文方法可去除地面上的工程車陰影輪廓,同時也保留了車頂與滾筒輪廓,可獲得更符合工程車真實形狀的準確輪廓。

圖10 梯度幅值對比
2.5 工程車車型識別率對比分析
本文在特征提取前進行了自然度保留圖像增強和顏色不變性處理,再分別對自然度保留圖像增強處理圖像提取NPE_HOG特征、對顏色不變性處理圖像提取CIV_HOG特征、將兩個特征融合為NC_HOG特征,對原圖提取ORI_HOG 特征、對Gamma校正處理圖像提取GAM_HOG特征,同時將其與圖像領域常用的特征描述子SIFT特征和LBP特征[23]等對車型識別率的影響進行對比分析,識別正確率見表2。
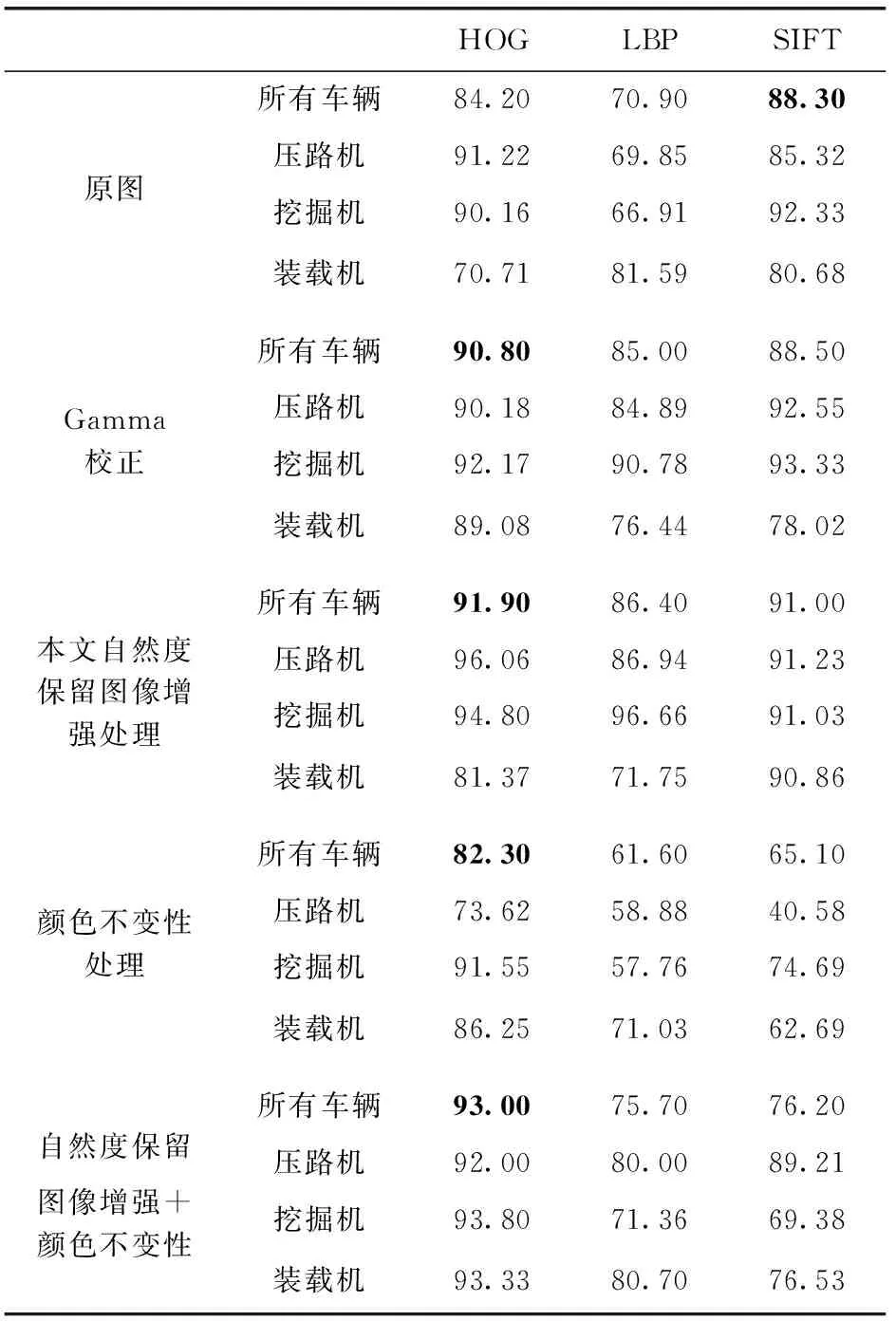
表2 各特征的車型自動識別正確率
從表2可知,在原圖上提取的HOG、LBP、SIFT特征中,SIFT有更高的識別正確率達88.30%。而對Gamma校正、自然度保留圖像增強和顏色不變性處理后的圖像提取的HOG特征均要比LBP特征和SIFT特征具有更高的識別正確率,HOG特征的識別正確率均在80%以上,經過Gamma校正和本文方法處理后提取的HOG特征識別正確率均在90%以上。對于三者特征,將自然度保留圖像增強和顏色不變性相結合提取的HOG特征相較于其它處理具有更高的識別正確率達93.00%,與原圖直接提取的HOG特征正確率相比提升了8.8%;在本文自然度保留圖像增強方法處理圖像上提取的LBP和SIFT特征相較于其它處理具有更高的識別正確率,與原圖上提取的特征相比,LBP特征識別正確率提升了15.5%,SIFT特征識別正確率提升了2.7%。
圖11展示了各特征的車型識別正確率趨勢對比,對于HOG特征,進行Gamma校正和本文自然度保留圖像增強方法處理后再提取的HOG特征識別正確率較原圖有明顯提升,且本文自然度保留圖像增強方法略微優于傳統Gamma校正。對于SIFT特征,由于其本身不受光照影響,所以在原圖、Gamma處理圖像和自然度保留圖像增強處理圖像上提取的SIFT特征的識別正確率差距不大。三者特征中,LBP特征整體識別效果最差,因為LBP是一種描述圖像局部紋理的特征算子,而3種工程車區別主要在于其形狀輪廓,使得LBP特征在車型識別上效果不理想。從3種特征的正確率趨勢上能明顯看出,從顏色不變性處理圖像上提取的三者特征較其它處理有著顯著更低的正確率,是因為顏色不變性處理后的圖像去除了陰影但同時缺失陽光直射區域使得車頂部分被抹去,在不完整車輛圖像上提取的車輛特征具有較差的識別效果。將自然度保留圖像增強和顏色不變性處理相結合僅提高了HOG特征的識別正確率,是因為自然度保留圖像增強的圖像補全了顏色不變性處理圖像上缺失的車輛特征,而HOG特征計算圖像梯度可表達圖像的輪廓特征,能較準確提取不含地面陰影的車輛整體輪廓特征。由三者的整體趨勢可看出,對于HOG和LBP特征,本文的自然度保留圖像增強方法相較于傳統的Gamma校正在一定程度上能提升識別正確率;顏色不變性處理并不能提高3種特征的識別正確率,但將自然度保留圖像增強和顏色不變性處理相結合后提取的HOG特征能大幅提升識別正確率。

圖11 基于不同特征的車型識別正確率趨勢對比
3 結束語
本文針對施工工地上的車輛車型檢測領域的研究缺乏現狀,提出了一種基于改進的HOG特征的自動檢測算法。在國家電網施工工地使用無人機進行數據采集,自行建立了包含壓路機、挖掘機和裝載機3種車型的工程車數據庫。首先針對施工現場環境,本文利用RPN算法對工地施工環境下的工程車輛目標區域進行自動劃分;結合自然度保留圖像增強處理和顏色不變性處理,可去除車輛的地面陰影并增強車輪與地面陰影區域的分界,進行該處理后提取的HOG特征能更準確展現工程車的車輛輪廓。再結合SVM分類器進行3種車型的自動判別,最高識別正確率達93.00%。實驗結果表明,本文提出的方法較傳統的HOG特征的識別正確率有明顯提升,但自然度保留圖像增強處理和顏色不變性處理相結合的方法并沒有提高LBP和SIFT特征的識別正確率。目前該處理還只適用于HOG特征的優化,該處理在其它特征上的優化適應是本文下一步的研究重點。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38