防相撞技術發展綜述與總體架構
2021-11-17 10:20:48劉志剛田宏安李洪偉
中國科技縱橫 2021年17期
劉志剛 田宏安 李洪偉
(1.四川九洲電器集團有限責任公司,四川綿陽 621000;2.四川九洲空管科技有限責任公司,四川綿陽 621000)
0.引言
空域飛行安全的3個層面:規劃層、戰略層、戰術層。規劃層從空域管理、運行、飛行程序上,盡最大可能在宏觀上避免飛行矛盾;戰略層在中觀上進行空中交通管理和自主間隔保持,管制員或飛行員借助地面和機載設備監視飛行活動,防止違規飛行和違反間隔標準;戰術層在微觀上進行機載防撞規避,通過機載設備實時掌握周圍環境態勢,確保飛機不會與其他飛行器和地面碰撞,不會進入危及飛行安全的惡劣氣象區域和特殊限制空域。機載防撞獨立于地面交通管制系統,是防止空中相撞事故發生的最后防線[1]。
1.民機防撞TCAS /ISS
隨著電子器件和航空電子系統模塊化(IMA)的發展,空管監視防撞技術也由單一監視功能向綜合監視技術發展。綜合監視系統減小了設備體積、重量和功耗,提升設備可靠性、可更換性及易維護性,正在替代單一功能TCAS,成為大中型運輸機、轟炸機的主流配置。
ARINC組織2011年發布升級版本ARINC768-2《綜合監視系統(ISS)最低性能標準》,該標準定義了4種構型的ISS,見表1。
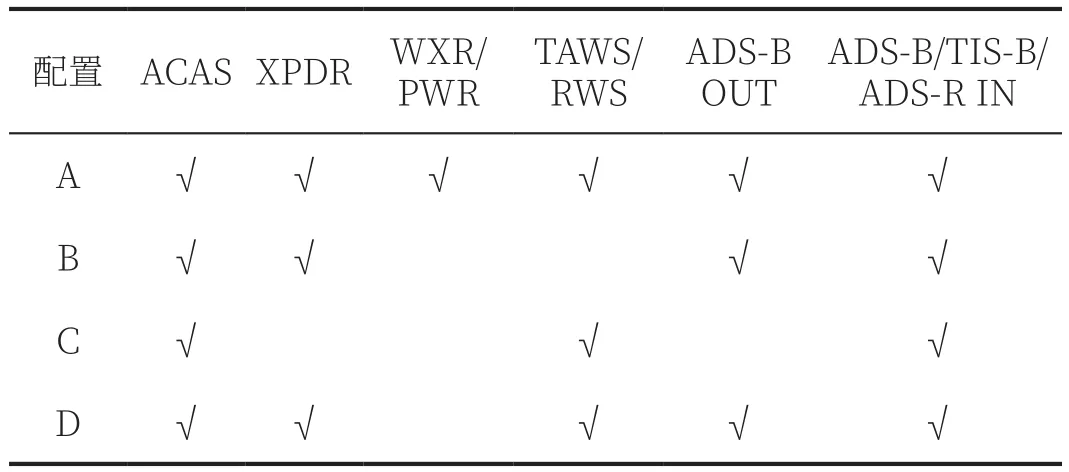
表1 ISS構型
當前國際上的主流產品主要采用A構型和D構型,如Honeywell公司和Collins公司產品符合A構型,Thales產品符合D構型。
2.戰機防撞 Auto-CAS
為降低戰機飛行事故率,美國國防部完成自動空中防撞系統(Auto-ACAS)系統的研制和試驗。后續階段,Auto-ACAS和Auto-GCAS(自動防撞地系統)將集成到一個統一的自動防撞(Auto-CAS)系統中。
Auto-ACAS與傳統的民航機載防撞系統(TCAS)不同,Auto-ACAS是一套基于軟件算法的飛機防撞系統。在飛行員手動防撞機動失敗的情況下由Auto-ACAS接管操作,在兩架飛機碰撞前的最后瞬間實現自動防撞[2]。
與TCAS只能垂直避撞不同,Auto-ACAS基于數據鏈通信完成多機間的自動避撞操作,飛機通常采取垂直方向、水平方向,或者垂直和水平方向組合的機動措施來避撞。機動措施包括拉升、向左滾轉并拉升和向右滾轉并拉升3種。在兩架飛機規避機動時會產生9種可能的機動組合。對于各種機動操作組合,計算兩架飛機飛行線路之間的最小間隔,其中最小間隔值最大的機動組合為最優方案。
Auto-ACAS系統的功能結構如圖1所示。
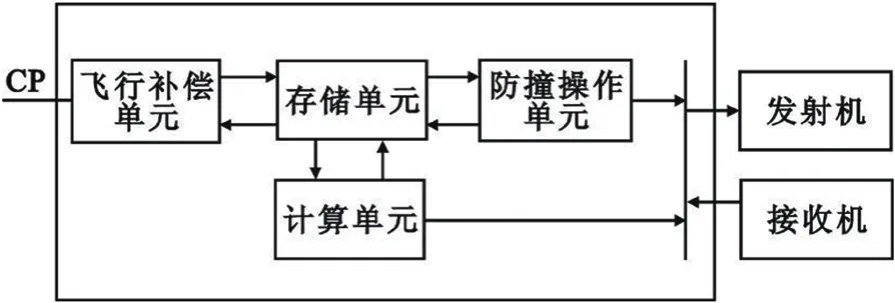
圖1 Auto-ACAS系統功能結構框圖
Auto-GCAS是基于精確導航和數字地形數據的軟件系統,飛行員將飛行軌跡疊加到數字地形圖上,通過將飛機已知的、預測的位置與飛機前方的地形圖進行比對,確定飛行軌跡是否有與地面或其他障礙物(高山)等發生碰撞的趨勢。當飛行員喪失判斷力或遭遇高過載意識喪失時,系統會進行干預。如圖2所示,在機載計算機控制飛機5s之前,系統將發出警報,如果飛行員不能在1.5s內做出反應,Auto-GCAS將自行控制飛機,首先迅速將飛機翻轉至機翼水平狀態,之后進行過載5g的拉起動作,飛機狀態恢復穩定后計算機將控制權交還飛行員。
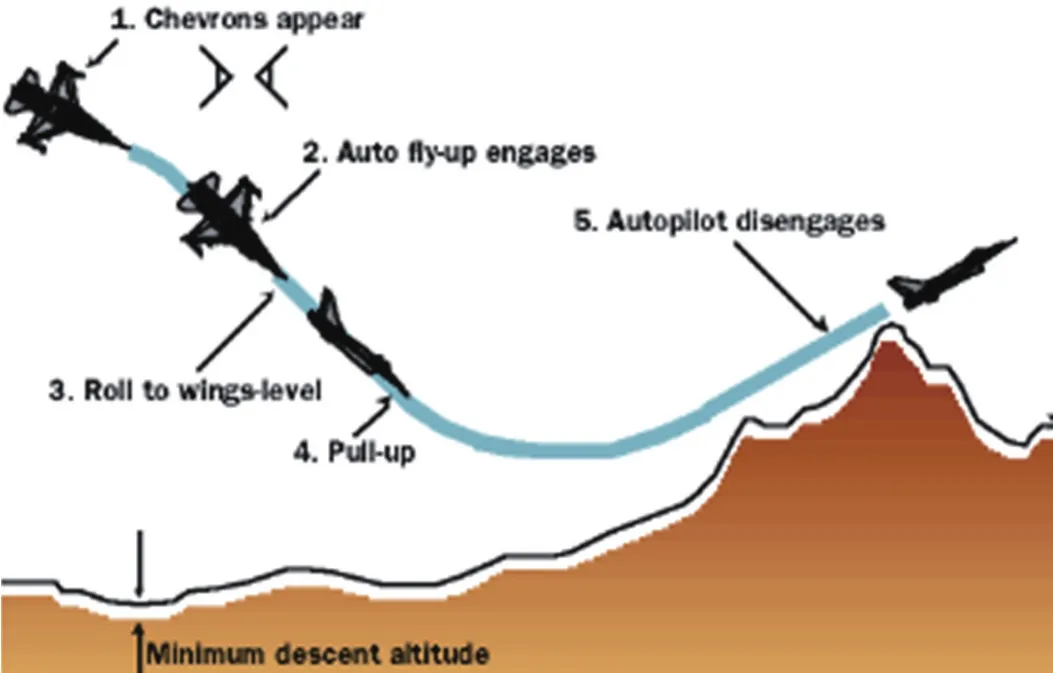
圖2 Auto-GCAS系統可在飛機碰撞前自動拉起飛機
3.新一代防撞系統ACAS X
ACAS X是FAA于2008年資助研究開發的一種最終將取代TCASⅡ的新型機載防撞方案,它兼容了SESAR和Next-Gen的未來運行概念。基于概率模型的ACAS X可提供未來飛機位置的統計表示法,在考慮系統安全操作目標的同時,實現了邏輯定制特殊程序或空域配置。相比TCASⅡ而言,ACAS X在降低升級與維護成本同時,可將碰撞風險降低約50%,升級更快速便捷。
3.1 ACAS X工作原理
TCASⅡ與ACAS X當前概念之間存在兩個關鍵差異,即防撞原理和監視數據源。在確定入侵飛機當前和未來預計位置時,TCASⅡ比較依賴使用機載應答機的詢問機制。如果所跟蹤的飛機被認為有威脅并同樣配有TCASⅡ,兩套TCASⅡ將進行協調并發出補充咨詢。當前的TCASⅡ咨詢原理是根據飛行最近交會時間和預定交會距離,針對潛在威脅發出告警[3]。
ACAS X并未使用硬件編碼規則,而是采用基于數字查找表的告警原理,并優化了基于概率的空域模型和一套安全操作注意事項。與TCASⅡ僅依靠基于應答機的監視不同,ACAS X可以兼容符合規定性能標準的任何監視源(或監視源組合),這種概念被稱作“即插即用”監視,可使ACAS X獲取各種來源的監視數據,如衛星、雷達、紅外和光電監視系統等,并且其中一些監視源還可用于支持無人機對未裝應答機飛機的感知和規避。ACAS X工作原理如圖3所示。
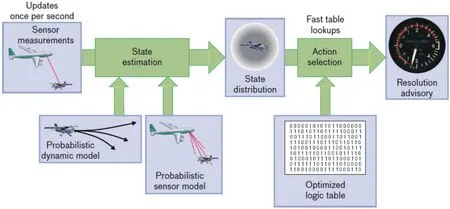
圖3 ACAS X工作原理圖
除了標準的ACAS X(ACAS XA),還有其他版本的ACAS X,ACAS X的4種版本見表2,從而將防撞保護擴展到了目前TCAS Ⅱ無法顧及的情況和用戶。
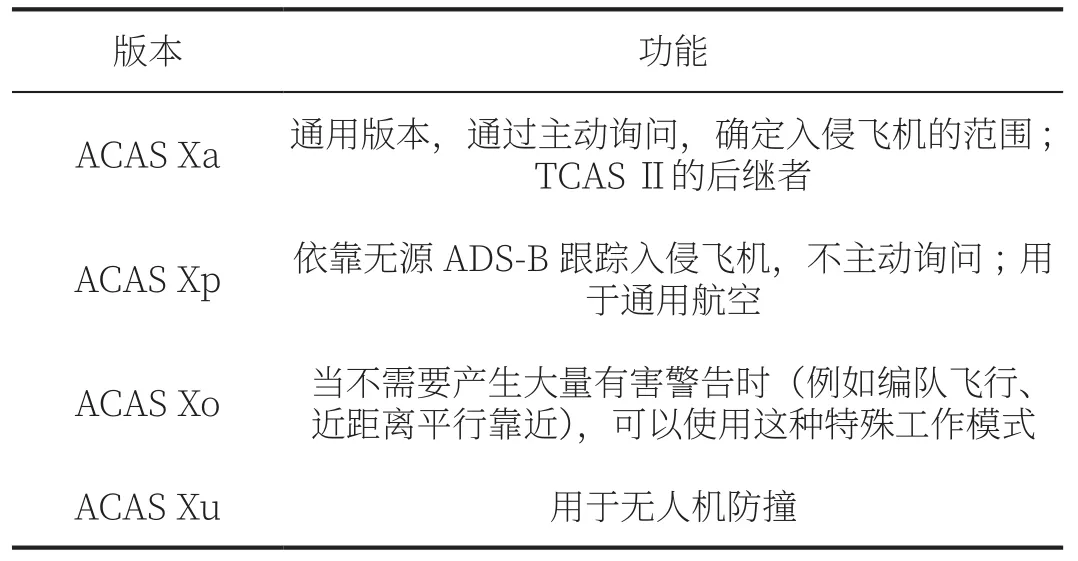
表2 ACAS X的4種版本
3.2 ACAS X的處理過程
ACAS X確保了與當前和未來CNS / ATM系統(包括TCAS II)的互操作性。ACAS X的作為下一代系統,致力于解決現有ACAS的設計方面的限制,提高安全性,降低虛警,滿足規避操作的便利性以及考慮飛行員可接受的飛機性能。調整內部處理流程降低告警對ATC系統的影響,并且發布的告警可以更易于操作和執行。ACAS X的每個變體都支持一組不同的操作目標。它們將共同提高安全性,減少不必要的RA,并為新用戶類提供防撞保護[4]。
ACAS X的處理鏈如圖4所示。
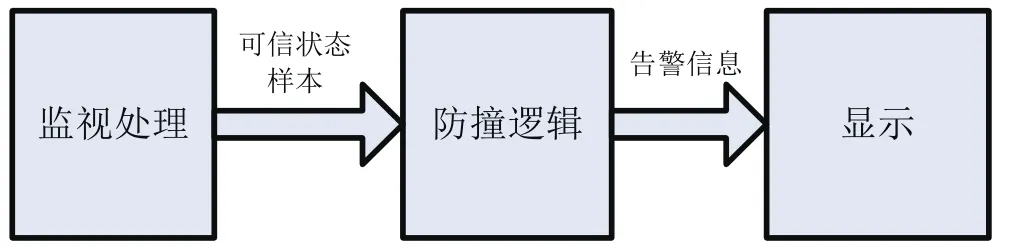
圖4 ACAS X處理鏈
3.2.1 ACAS Xa
ACAS Xa除了被動監視,還采用主動監視和協調,并結合全局威脅解決邏輯。它旨在替代TCAS II和ACAS II。ACAS Xa包括目標監視和防撞算法兩大部分,設計為監視跟蹤模塊(STM)和威脅決斷模塊(TRM)。
3.2.2 監視跟蹤模塊STM
STM處理所有目標監視和本機數據,并按TRM需要的格式進行輸出。STM輸出到TRM的本機和目標機數據均附加一組不同權值的樣本值,代表本機和目標機的位置不確定性,這些帶有權值的樣本值統稱為置信狀態。每個目標機都有水平和垂直位置的置信狀態,本機只有垂直位置置信狀態。各類位置的置信狀態將輸出到威脅決斷模塊(TRM)進行狀態和價值估計,這是與TCASII的另外一個重要區別[5]。
入侵機垂直和本機的垂直置信狀態包括海拔和海拔率的估計。提供五個“加權”樣本。一個概率或權重為1/3的“中間”樣本([z,dz])和四個權重為1/6的樣本([z,dz+σdz],[z,dz-σdz],[z+σz,dz],[z-σz,dz])。這五個垂直西格瑪樣本(置信狀態)代表垂直或高度分布。
入侵機水平置信狀態包括相對x和y以及x和y的比率(dx,dy)。提供了九個“加權”樣本。提供權重為1/3的一個中間樣本([x,y,dx,dy])和在中間樣本兩側的八個另外的樣本,權重為1/12[6]。
STM用信息標記每個航跡,允許TRM確定航跡是否可用于僅生成RA和TA或TA。
3.2.3 威脅決斷模塊TRM
威脅決斷模塊接收監視跟蹤模塊輸出接口的數據后,實現TA、RA、RA協同,并對目標機的威脅進行評估,最后確定顯示告警的邏輯參數,其設計的總體架構圖如圖5所示。

圖5 威脅決斷模塊架構圖
TRM需要的本機相關輸入包括:無線電高度、航向、S模式地址,以及設備垂直狀態。本機垂直狀態估計信息是一組本機垂直高度、高度率相關的置信狀態量。TRM需要的目標機相關輸入包括:目標S模式地址報告值、高度量化精度、TCAS設備狀態、收到的垂直協同補充信息(VRC)。TRM的處理過程如圖6所示。
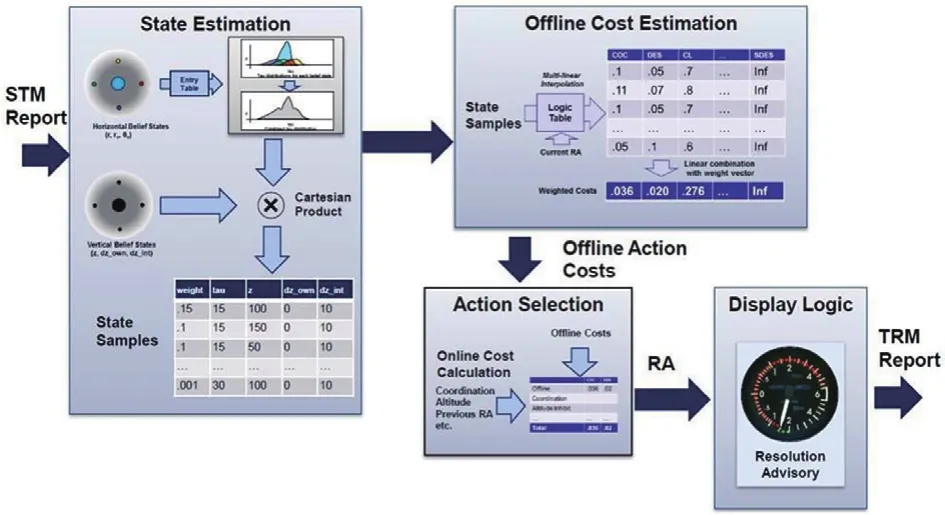
圖6 TRM的處理過程
4.結論
隨著航空電子系統模塊化(IMA)的發展,民機防撞由單一防撞TCAS系統發展為綜合監視ISS系統,戰機防撞Auto-CAS取得了積極進展。新一代防撞系統ACAS X的出現提高了效率和安全性,而且不同版本的ACAS X適合不同類型的飛機,滿足不同的防撞需求,是防撞系統的發展方向。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代陜西(2019年11期)2019-06-24 03:40:28
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
