基于深度置信網(wǎng)絡(luò)的制動器故障診斷方法①
2021-11-14 02:37:22劉惠康
高技術(shù)通訊 2021年10期
李 倩 劉惠康 皮 瑤 喻 青
(*武漢科技大學(xué)教育部冶金自動化與檢測技術(shù)工程研究中心 武漢430081)
(**中鋼集團武漢安全環(huán)保研究院 武漢430081)
0 引言
吊車作為工業(yè)生產(chǎn)中最常見的設(shè)備,不僅要保證其高效率的運行作業(yè),對于它的安全問題更是不可忽視。在實際的工程中,考慮到制動器是吊車高效、安全作業(yè)的保障,對制動器進行故障診斷引起了相關(guān)學(xué)者的廣泛研究。高峰[1]構(gòu)建了電梯故障診斷專家系統(tǒng),結(jié)合支持向量機(support vector machine,SVM)完成了電梯故障診斷。何常遠等人[2]分析了起重機制動系統(tǒng)典型故障及原因,利用Levenberg-Marquardt 算法優(yōu)化的BP(back propagation)神經(jīng)網(wǎng)絡(luò)識別故障。劉錦榮等人[3]通過構(gòu)建遺傳算法(genetic algorithm,GA)優(yōu)化的BP 神經(jīng)網(wǎng)絡(luò)(GA-BP)的診斷方法,實現(xiàn)了提升機液壓制動系統(tǒng)的常見故障診斷。雖然這些方法在過去取得了不錯的效果,但隨著故障數(shù)據(jù)的日漸復(fù)雜化和大數(shù)據(jù)化,僅靠傳統(tǒng)的故障診斷方法難以取得很好的效果。比如專家系統(tǒng)只適合應(yīng)用于研究非常透徹的領(lǐng)域,而在研究尚未成熟的領(lǐng)域應(yīng)用則不能保證較高的準(zhǔn)確率。SVM 作為一種基于有限樣本統(tǒng)計理論的分類方法,只適合解決小樣本、高維數(shù)等問題。傳統(tǒng)的神經(jīng)網(wǎng)絡(luò)具有故障診斷準(zhǔn)確率高的優(yōu)點,但是存在網(wǎng)絡(luò)收斂速度慢、容易陷入局部最小等問題。
深度學(xué)習(xí)理論的提出,解決了數(shù)據(jù)多且復(fù)雜的難題,越來越多的學(xué)者將其應(yīng)用在不同的研究領(lǐng)域。深度置信網(wǎng)絡(luò)(deep belief network,DBN)作為深層網(wǎng)絡(luò)的典型代表,憑借其強大的數(shù)據(jù)處理和特征提取能力廣泛地應(yīng)用于各種研究中,特別是在手寫體識別[4-6]、語音識別[7-8]及圖像處理[9-10]等領(lǐng)域取得了一些成果。通過查詢相關(guān)文獻可以看出,利用深度置信網(wǎng)絡(luò)進行故障診斷具有一定優(yōu)勢。如Tamilselvan 和Wang[11]提出將DBN 理論應(yīng)用到飛機發(fā)動機的故障診斷中,并對發(fā)動機結(jié)構(gòu)狀態(tài)進行了有效識別。Duc 和Provost[12]提出通過采集振動、壓力、電流信號,利用DBN 網(wǎng)絡(luò)對往復(fù)式壓縮機氣閥進行故障診斷的方法,并通過實驗證明了此方法的可行性。魯春燕和李煒[13]利用DBN 網(wǎng)絡(luò)對煉化空壓機進行故障診斷,并與另外兩種傳統(tǒng)方法進行對比后發(fā)現(xiàn)該方法具有較高的準(zhǔn)確率和穩(wěn)定性。
針對前文所述問題,本文提出一種基于深度置信網(wǎng)絡(luò)的吊車制動器故障診斷方法。相比于現(xiàn)有的制動器故障診斷方法,本文方法的優(yōu)點在于采用堆疊的受限玻爾茲曼機構(gòu)成的DBN 可以對數(shù)據(jù)進行充分的預(yù)訓(xùn)練,從而更準(zhǔn)確地提取特征;集特征提取器與分類器于一體的結(jié)構(gòu)既解決了過分依賴人工經(jīng)驗的問題,又可以通過BP 網(wǎng)絡(luò)的反向微調(diào)使得模型參數(shù)更精準(zhǔn)。除此之外,本文所應(yīng)用的采集吊車制動器制動正壓力的柔性薄膜傳感器陣列能有效保證每個檢測單元的一致性,從而保證了數(shù)據(jù)的準(zhǔn)確性。為了更好地展示深度置信網(wǎng)絡(luò)模型的優(yōu)點,本文將該方法分別與基于SVM 和GA-BP 神經(jīng)網(wǎng)絡(luò)的制動器故障診斷方法對比。結(jié)果表明,利用深度置信網(wǎng)絡(luò)進行制動器故障診斷不僅能獲得更高的診斷精度,而且穩(wěn)定性也比較高。
1 深度置信網(wǎng)絡(luò)基本原理
深度置信網(wǎng)絡(luò)是一種由多個受限玻爾茲曼機(restricted Boltzmann machine,RBM)和一個分類器堆疊起來而構(gòu)成的概率生成模型[14]。其網(wǎng)絡(luò)結(jié)構(gòu)如圖1 所示,該模型由2 個RBM 堆疊而成,每個RBM 又包含可視層v和隱藏層h。可視層v0代表輸入數(shù)據(jù),數(shù)據(jù)映射到隱藏層h0,構(gòu)成第1 層RBM;同時,h0又作為下一個RBM 的輸入,數(shù)據(jù)就這樣逐層傳遞,最終在高層提取出具有表征能力的特征表示。
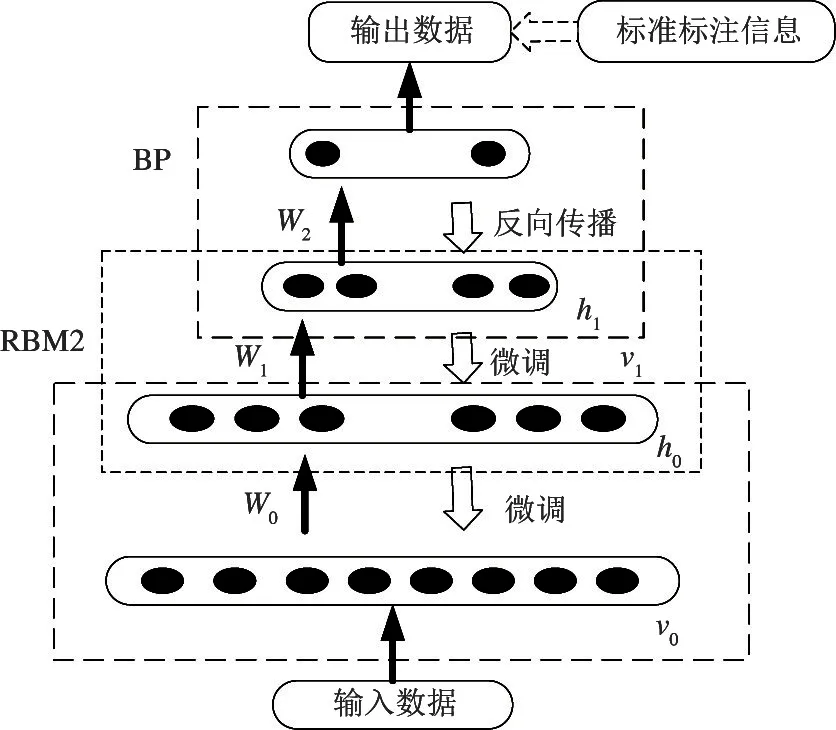
圖1 深度置信網(wǎng)絡(luò)模型
由于DBN 是一種深層神經(jīng)網(wǎng)絡(luò),結(jié)合其自身的結(jié)構(gòu)特點,它既可用作非監(jiān)督學(xué)習(xí),又可用于監(jiān)督學(xué)習(xí)。用作非監(jiān)督學(xué)習(xí)時,它的功能類似于自編碼器;而用于監(jiān)督學(xué)習(xí)時,可將它作為一個分類器來使用[15]。
深度置信網(wǎng)絡(luò)的訓(xùn)練可分為兩個部分:第一部分為無監(jiān)督的預(yù)訓(xùn)練,該部分的訓(xùn)練通過貪婪算法由低往高地依次訓(xùn)練每個受限玻爾茲曼機,將低層RBM 的輸出作為下一個RBM 的輸入,依次訓(xùn)練從而不斷更新網(wǎng)絡(luò)參數(shù)以獲得最佳學(xué)習(xí)特征;第二部分為有監(jiān)督的反向微調(diào)階段,將訓(xùn)練誤差反向地傳遞給每個RBM,從而進行每層RBM 參數(shù)的微調(diào),反復(fù)進行這些步驟直至達到最大迭代次數(shù)為止,此時的深度置信網(wǎng)絡(luò)模型的參數(shù)也達到了最優(yōu)。這一過程的核心可概括為利用貪婪學(xué)習(xí)算法不斷提取故障診斷信號中的故障特征,利用BP 神經(jīng)網(wǎng)絡(luò)反向微調(diào)使得DBN 具有最優(yōu)的故障診斷與預(yù)測性能。
1.1 受限玻爾茲曼機的結(jié)構(gòu)與原理
受限玻爾茲曼機作為一個典型的能量模型[16],在深度置信網(wǎng)絡(luò)模型的形成與訓(xùn)練中有著重要的用處。RBM 的結(jié)構(gòu)如圖2 所示,每個RBM 中都包含兩部分,即可視層v和隱藏層h。每個可視層內(nèi)部單元之間不存在連接,只在可視層與隱藏層的層與層之間有雙向聯(lián)系。
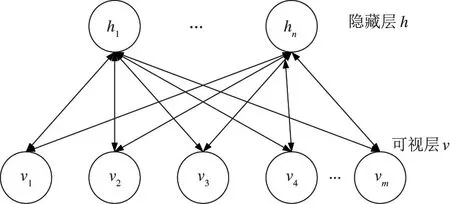
圖2 受限玻爾茲曼機
包含m個可視層和n個隱藏層的RBM,它在某種狀態(tài)(v,h) 下的能量函數(shù)的矩陣-向量形式可以表示為

式中,θ={a,b,w} 表示受限玻爾茲曼機中的參數(shù),a和b分別為可視層單元和隱藏層單元的偏置向量,w為隱藏層單元和可視層單元之間的權(quán)重。
由式(1)可得出在此狀態(tài)下的聯(lián)合概率分布為

其中

Zθ為歸一化因子,也稱配分函數(shù)。
因為RBM 中層與層之間條件獨立,所以可計算出可視層vi在隱藏層h狀態(tài)下被激活的概率為

同理可得出,隱藏層hj在可視層v狀態(tài)下被激活的概率為

在上式中,vi和ai分別為第i個可見層單元的狀態(tài)和偏置;bj和hj分別第j個隱藏層單元的狀態(tài)和偏置;sigmoid(x)表示激活函數(shù),且

1.2 受限玻爾茲曼機的訓(xùn)練算法
在RBM 的訓(xùn)練過程中,可見單元即被視為數(shù)據(jù)分布的樣本,訓(xùn)練的目的是不斷更新θ={w,a,b}使邊際分布Pθ(v,h) 最大程度上接近真實觀測數(shù)據(jù)分布PΣ(v),即生成的觀測數(shù)據(jù)的對數(shù)似然需要最大化。文獻[17]表明,對數(shù)似然的梯度上升可以通過吉布斯抽樣過程有效地近似,對于RBM 來說就產(chǎn)生了如下的學(xué)習(xí)規(guī)則:

其中,{·}data代表訓(xùn)練數(shù)據(jù)的期望,{·}model代表模型分布下的數(shù)據(jù)期望,η代表學(xué)習(xí)率,且η∈(0,1)。通常情況下,{·}model不易通過計算獲得,所以會采取抽樣逼近來獲得。
為了能使網(wǎng)絡(luò)達到平衡,使用吉布斯采樣近似值通常需要創(chuàng)建足夠的樣本。然而對比散度算法[17](contrastive divergence,CD)可以有效地解決這個問題,并且在實踐中表現(xiàn)非常好。本文采用K步對比散度算法(CD-K)來逼近{·}model以達到更新網(wǎng)絡(luò)參數(shù)的效果。
2 基于深度置信網(wǎng)絡(luò)的制動器故障診斷
制動器的有效制動是控制吊運設(shè)備正常運行的關(guān)鍵以及保障安全的重要防線。因此,采用有效措施監(jiān)測制動器不同工況的數(shù)據(jù)信號,及時預(yù)報診斷故障非常重要。而傳統(tǒng)的故障診斷方法,如故障樹、專家系統(tǒng)、人工神經(jīng)網(wǎng)絡(luò)等,由于過分依靠人工經(jīng)驗,不能及時有效地提取故障特征和故障診斷準(zhǔn)確率低等問題而逐漸被深度神經(jīng)網(wǎng)絡(luò)取代。深度置信網(wǎng)絡(luò)作為深度神經(jīng)網(wǎng)路的代表之一,由于其強大的特征提取能力和實踐效果顯著的優(yōu)點被廣泛應(yīng)用于故障診斷中。本文中的吊車制動器故障診斷流程示意圖如圖3 所示。
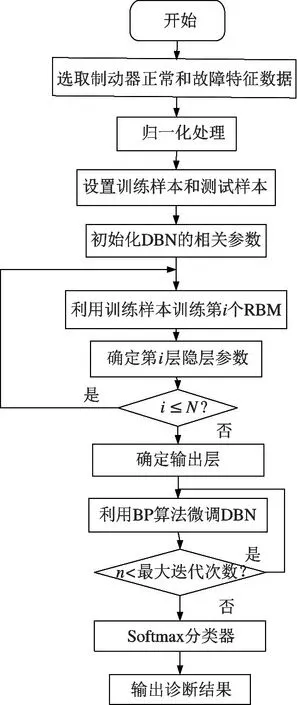
圖3 吊車制動器故障診斷流程圖
采用上述方法進行吊車制動器故障診斷的一個優(yōu)點是可以根據(jù)診斷結(jié)果逐漸擴大故障特征數(shù)據(jù)的數(shù)據(jù)庫,從而實現(xiàn)特征數(shù)據(jù)的自學(xué)習(xí)和優(yōu)化,達到提高故障診斷精度和穩(wěn)定性的目的。
2.1 故障診斷步驟
基于深度置信網(wǎng)絡(luò)的制動器故障診斷可以分為以下幾個步驟。
(1)利用柔性薄膜傳感器陣列獲取吊車制動器不同工況時的制動壓力,并進行相關(guān)性分析和歸一化處理,劃分測試樣本和訓(xùn)練樣本。
(2)通過多次測試得出深度置信網(wǎng)絡(luò)的參數(shù)。如DBN 網(wǎng)絡(luò)層數(shù)、輸入節(jié)點數(shù)、輸出節(jié)點數(shù)以及隱藏層節(jié)點數(shù)、學(xué)習(xí)率和迭代次數(shù)。
(3)利用訓(xùn)練數(shù)據(jù)作為輸入,對每個RBM 進行無監(jiān)督的訓(xùn)練,直至第N個RBM 訓(xùn)練完為止。
(4)利用BP 算法實現(xiàn)對整個DBN 網(wǎng)絡(luò)的有監(jiān)督的反向微調(diào)訓(xùn)練過程。
(5)DBN 模型訓(xùn)練完畢后,輸入測試樣本數(shù)據(jù),對吊車制動器進行故障識別與分類。
根據(jù)上述故障診斷步驟可以看出,深度置信網(wǎng)絡(luò)模型能將無監(jiān)督地逐層訓(xùn)練受限玻爾茲曼機和有監(jiān)督地反向微調(diào)相結(jié)合,同時完成特征提取和故障分類識別的任務(wù),這就是相比傳統(tǒng)故障診斷方法而言深層神經(jīng)網(wǎng)絡(luò)的優(yōu)勢所在。
2.2 數(shù)據(jù)獲取方式
本文的制動正壓力由一種柔性薄膜傳感器采集獲得,其結(jié)構(gòu)示意圖如圖4 所示。該傳感器陣列不同于一般的測力計、應(yīng)變儀,通常能獲得力的測量精度在±5%~±25%,現(xiàn)有傳感器制造技術(shù)不能保證陣列中各傳感器的一致性,而該薄膜傳感器陣列采用陣列可變電阻測量校正方法,使得陣列中每個檢測單元的分壓比一致。
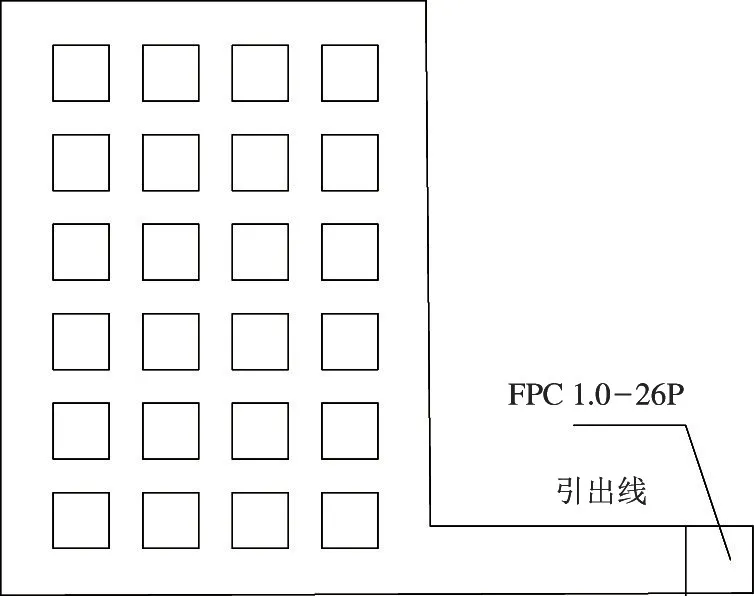
圖4 柔性薄膜壓力傳感器結(jié)構(gòu)示意圖
柔性薄膜壓力傳感器在承壓時,壓力值與器件的電導(dǎo)率有良好的正相關(guān)性,利用該特性設(shè)計單元力檢測算法。采用柔性薄膜傳感器陣列壓力檢測技術(shù)檢測制動面承壓狀況,根據(jù)實時檢測的制動器制動面壓力大小及分布情況,結(jié)合制動器控制指令即可對制動器工作狀態(tài)、設(shè)備缺陷或故障做出判斷。
3 具體實例及驗證
本文的數(shù)據(jù)來源于中鋼集團武漢安全環(huán)保研究院的AHYDT-RX2018 型鼓式制動器,并在國家橋門式起重機機械產(chǎn)品質(zhì)量監(jiān)督檢測中心進行現(xiàn)場實驗采集數(shù)據(jù)。在制動器左右兩側(cè)的摩擦襯墊與制動閘瓦之間放置2 個柔性薄膜傳感器陣列,以實時檢測制動面受力大小及力的分布。壓力傳感器陣列信號采集采用分布式I/O 設(shè)備,通過MODBUS 現(xiàn)場總線與制動系統(tǒng)監(jiān)控主控制器TPC1162Hi 工業(yè)平板計算機交互信息。同時,通過MCGS 嵌入式組態(tài)軟件進行數(shù)據(jù)處理和圖像顯示以及實時進行故障預(yù)報。
實驗中通過控制吊車制動器的閉合和打開模擬各類故障,分別采集吊車制動器不同運行狀態(tài)下的監(jiān)測數(shù)據(jù)。為了充分提取特征數(shù)據(jù)的故障信號,每種運行狀態(tài)實驗40 次,按照80%和20%的比例隨機劃分訓(xùn)練樣本和測試樣本,每種運行狀態(tài)可以通過傳感器陣列采集到3840 個壓力值,吊車制動盤常見的運行狀態(tài)如表1 所示。
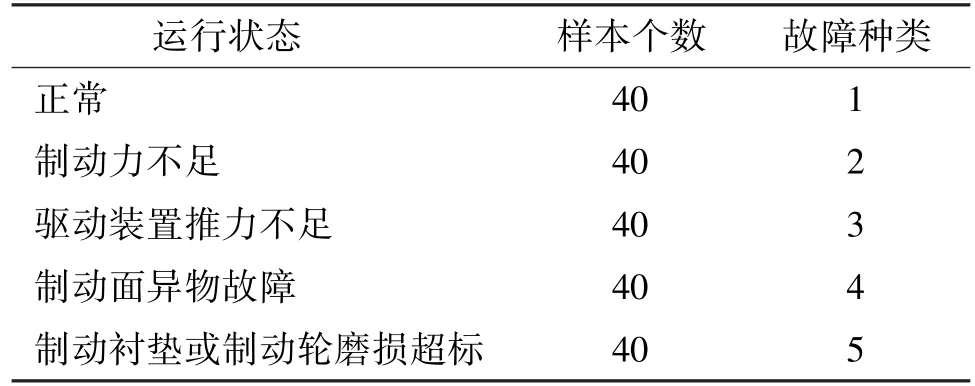
表1 吊車制動器的幾種常見運行狀態(tài)及樣本數(shù)
將數(shù)據(jù)輸入到DBN 網(wǎng)絡(luò)之前,對數(shù)據(jù)進行歸一化處理,本文使用的歸一化公式為

其中,Xmin和Xmax分別為所采集的壓力值的最小值和最大值。
3.1 迭代次數(shù)的確定
在訓(xùn)練深度置信網(wǎng)絡(luò)的過程中,為了提高網(wǎng)絡(luò)的診斷精度,需要不斷更新網(wǎng)絡(luò)參數(shù),而這一過程需要通過迭代來完成,迭代次數(shù)即DBN 的訓(xùn)練次數(shù)。為了得到最合適的迭代次數(shù),分別取不同的迭代次數(shù)判斷其故障診斷能力。由圖5 可以看出,隨著迭代次數(shù)的增加,故障診斷誤差不斷減小,最后基本趨于穩(wěn)定;當(dāng)?shù)螖?shù)為500 次時,診斷誤差基本趨于穩(wěn)定。考慮到隨著迭代次數(shù)的增加模型的訓(xùn)練時間也大幅度增加,從而導(dǎo)致故障診斷實時性效果不好。于是,在本文中,該DBN 模型的迭代次數(shù)取500 次。
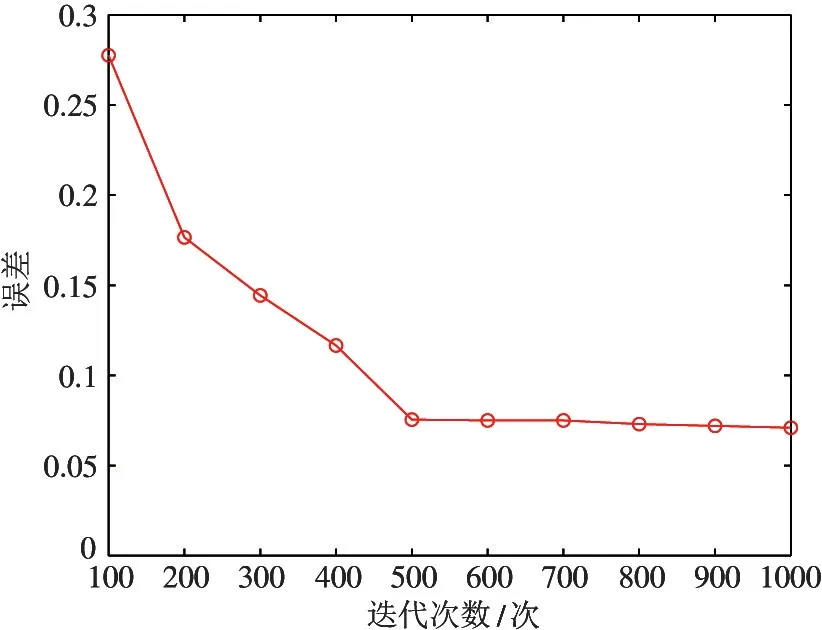
圖5 不同迭代次數(shù)的故障診斷誤差
3.2 受限玻爾茲曼機個數(shù)的確定
為了確定受限玻爾茲曼機個數(shù)(即隱藏層層數(shù))對故障診斷精度的影響,通過搭建N(N=1,2,3,4,5)層深度置信網(wǎng)絡(luò)模型,利用一樣的訓(xùn)練樣本集和測試樣本集對該模型進行實驗。為了保證實驗結(jié)果的可靠性,每次實驗進行10 次模擬,得出的準(zhǔn)確率取平均值。N層DBN 網(wǎng)絡(luò)的故障診斷準(zhǔn)確率如圖6 所示。其中,4 層DBN 網(wǎng)絡(luò)的平均故障診斷率最高。
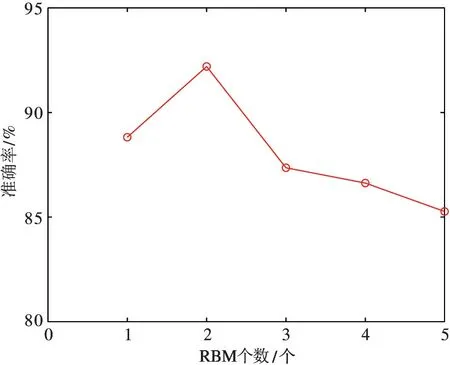
圖6 不同層數(shù)DBN 的診斷準(zhǔn)確率
經(jīng)過以上過程的不斷訓(xùn)練,最后在本文中采用的深度置信網(wǎng)絡(luò)一共包含4 層,其中2 層為隱藏層,每層神經(jīng)元的個數(shù)分別為4、24、24、5,迭代次數(shù)為500次,學(xué)習(xí)率為0.1。
3.3 診斷結(jié)果分析
為了更好地展示利用DBN 網(wǎng)絡(luò)進行故障診斷的優(yōu)點,本文分別利用GA-BP 和SVM 的訓(xùn)練集和測試集做了多次相同的實驗,這兩種方法的故障診斷準(zhǔn)確率如圖7 所示。
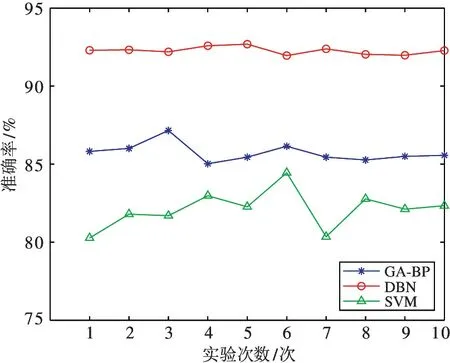
圖7 3 種故障診斷方法準(zhǔn)確率對比
結(jié)合圖7 和表2 可以看出,DBN 故障診斷平均準(zhǔn)確率高達92.14%,明顯高于GA-BP 神經(jīng)網(wǎng)絡(luò)和SVM;且DBN 準(zhǔn)確率方差也明顯低于GA-BP 和SVM,這說明利用DBN 進行吊車制動器故障診斷的穩(wěn)定性較高。以上實驗有效地證實了利用深度置信網(wǎng)絡(luò)對吊車制動器進行故障診斷的優(yōu)越性。

表2 不同方法的診斷結(jié)果
4 結(jié)論
本文提出一種基于深度置信網(wǎng)絡(luò)的吊車制動器故障診斷方法。該方法基于深層神經(jīng)網(wǎng)絡(luò)模型,充分展示了強大的數(shù)據(jù)提取能力,減少了預(yù)先對制動器本身進行建模的要求。實驗結(jié)果表明,將深度置信網(wǎng)絡(luò)應(yīng)用于吊車制動器故障診斷取得了較高的診斷精度,克服了傳統(tǒng)故障診斷方法對于故障信號預(yù)處理及人工經(jīng)驗的依賴;基于DBN 故障診斷模型的搭建與調(diào)試涉及到診斷對象的影響,在本次實驗中,適合該吊車制動器的DBN 包含2 個隱含層。
雖然這次的實驗取得了較好的診斷效果,但調(diào)節(jié)DBN 網(wǎng)絡(luò)初始參數(shù)耗費了太多時間。今后,可將利用一種優(yōu)化算法自適應(yīng)地調(diào)節(jié)DBN 網(wǎng)絡(luò)參數(shù)作為本文的進一步研究方向。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21