準Z 源逆變器自適應級聯模型預測控制①
2021-11-14 02:37:20楊佳磊
高技術通訊 2021年10期
吳 春 楊佳磊
(浙江工業大學信息工程學院 杭州310023)
0 引言
2002 年,文獻[1]提出了Z 源逆變器(Z-source inverter,ZSI),作為一種具有升壓功能逆變器拓撲,它的出現有效解決了傳統電壓源逆變器(voltagesource inverter,VSI)輸出相電壓幅值受輸入母線電壓限制的局限性。ZSI 作為一種單級式逆變器拓撲,其電壓調節范圍寬,允許上下橋臂同時導通以實現升壓功能,避免了由死區引起的輸出波形畸變。因此,ZSI 在光伏系統中具有非常廣泛的應用[2-3]。然而,ZSI 的阻抗網絡存在電容電壓應力大、啟動時沖擊電流大、輸入電流斷續等缺點[4]。準Z 源逆變器(quasi-ZSI,qZSI)改進了Z 源逆變器,其在繼承ZSI 優點的基礎上,具有電容電壓應力小、輸入電流連續等優點[5]。
有限集模型預測控制具有控制方法簡單、無需調制、響應速度快、能同時處理多變量和非線性約束等優點,在電力電子、電機控制等領域得到了廣泛的應用[6]。目前,已有不少研究者將有限集模型預測控制(finite control set-model predictive control,FCSMPC)應用于qZSI 系統中[7-8],并取得了良好的控制效果。文獻[7]計算了由電感電流、電容電壓和輸出相電流三者組合而成的且包含3 個權重系數的代價函數,以此來獲得下一個控制周期的最優開關狀態。但是,權重系數的選取往往基于經驗調試,當存在多個權重項的時候,選擇一組合適的權重系數具有不小的難度[9]。
為了消除模型預測控制中權重系數,文獻[10]將一種級聯模型預測控制(sequential-model predictive control,S-MPC)策略應用于電機控制中,該策略首先計算轉矩的代價函數,選擇轉矩誤差最小的兩個開關狀態,然后將這兩個開關狀態代入到磁鏈代價函數,選擇使磁鏈誤差最小的開關狀態作為下一個控制周期的最優開關狀態。文獻[11]和文獻[12]分別將S-MPC 策略應用于三電平逆變器和交流/交流變換器中,通過將所選取被控對象的代價函數進行先后計算,從而消除了模型預測控制中的權重系數。
由于模型預測控制的性能依賴于精確的模型參數[13-14],因此基于模型預測控制設計的準Z 源逆變器,其控制性能依賴于模型精度。在文獻[15,16]的研究中,均是以精確模型參數為前提條件,然而在很多場合,設計者無法獲得準確參數,并且參數還會隨著溫度、磁場飽和程度等的變化而改變,使得控制性能下降。為了解決模型預測控制依賴準確參數的問題,國內外學者對此展開了研究[17-19]。文獻[20]通過在線參數辨識方法,實時更新模型,但復雜的參數辨識方法會增加系統的計算量。文獻[21,22]采用自適應控制方法解決了模型預測控制依賴精確模型參數的弊端,使系統具有較強魯棒性。
本文針對qZSI 系統中控制變量多、參數易攝動的特點,提出一種適用于qZSI 的自適應級聯模型預測控制(adaptive sequential-model predictive control,AS-MPC)策略。首先推導qZSI 中電感電流、電容電壓和輸出電流的離散模型,并根據控制對象優先級設計S-MPC 策略實現對上述3 個控制量的有效控制。同時,引入負載電氣參數攝動自適應控制律,對系統總擾動進行實時估計,削弱負載電氣參數誤差對系統控制性能的影響。并且,為了消除數字控制器中輸出延遲所帶來的負面影響,加入延遲補償策略。另外,利用矢量角補償法來獲得輸出電流的未來參考值[23]。最后通過實驗驗證了所提出的ASMPC 策略在qZSI 中的可行性,同時分析其穩態性能、動態性能以及參數自適應能力。
1 qZSI 數學模型
qZSI 系統的拓撲結構如圖1 所示,主要由直流電源、準Z 源阻抗網絡、三相逆變橋和RL負載等組成。qZSI 可分為非直通狀態和直通狀態兩種工作狀態。其中,非直通狀態類似VSI 的工作狀態,而直通狀態指上下橋臂同時導通從而實現直流母線升壓目的。表1 列出qZSI 中所有可能的開關狀態及其在α、β軸上電壓分量,表中為逆變器側母線峰值電壓。
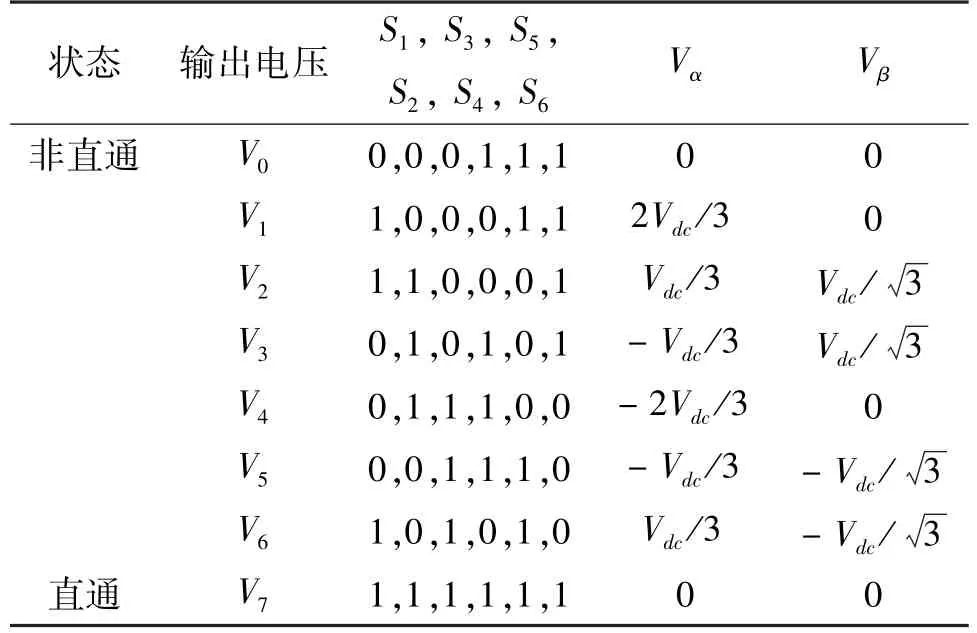
表1 開關狀態表
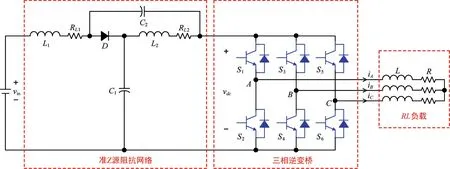
圖1 qZSI 拓撲結構
由PARK 變換可得:

式中,θ為d軸與α軸之間的夾角,Vd、Vq為d、q軸上的電壓分量。在d、q軸同步旋轉坐標系上,輸出電壓方程為
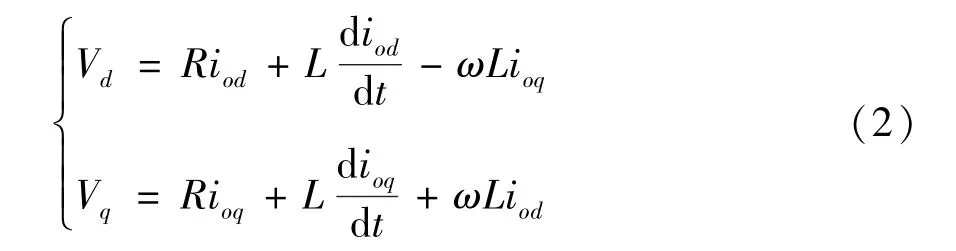
式中,R、L為負載相電阻和相電感,iod、ioq為輸出電流在d、q軸上的電流分量,ω表示角頻率。
令系統采樣周期為Ts,用前向歐拉公式對式(2)在第k時刻離散化,得到預測模型:
式中,iod(k)、ioq(k)為第k個采樣時刻的電流采樣值在d、q軸上的分量,iod(k+1)、ioq(k+1)為第(k+1)個采樣時刻的電流預測值在d、q軸上的分量。
(1)當qZSI 處于非直通狀態時,逆變橋可以等效為一個電流源iinv(k),該電流源可以表示為開關狀態的函數。此時直流電源vin(k)與阻抗電感給負載和阻抗電容供電,二極管D正向導通,等效電路如圖2(a)所示。電感電流和電容電壓可以表示為
式中,L1、C1分別為阻抗網絡中的電感值和電容值,RL1為電感L1的雜散電阻,iL1(k)和vC1(k)分別為第k個采樣時刻電感電流和電容電壓的采樣值,iinv(k)=iA(k)SA+iB(k)SB+iC(k)SC,iA(k)、iB(k)和iC(k)為第k個采樣時刻A相、B相和C相的電流值。
用前向歐拉公式對式(4)在第k時刻離散化,得到預測模型如式(5)所示。
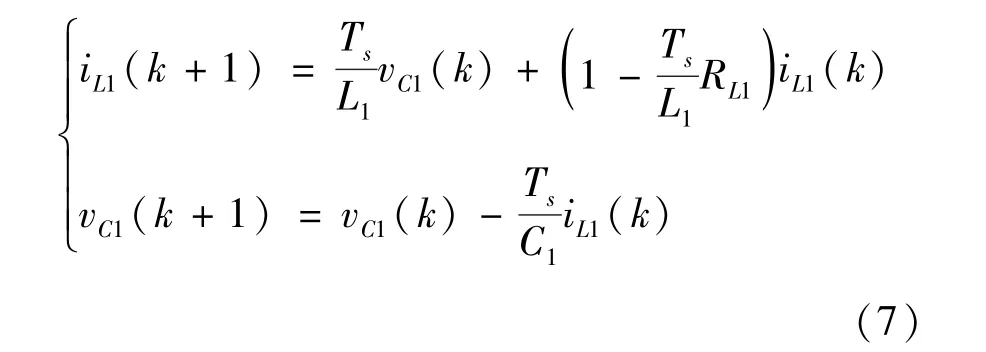
(2)當qZSI 處于直通狀態時,逆變橋上下橋臂同時導通。此時,直流電源vin和阻抗電容同時給阻抗電感充電,二極管D反向截止,等效電路如圖2(b)所示。電感電流和電容電壓可以表示為

圖2 兩種狀態下qZSI 等效電路
用前向歐拉公式對式(6)在第k時刻離散化得:
2 qZSI 的傳統FCS-MPC 控制策略
由于在qZSI 系統中,輸入電感電流、電容電壓和輸出電流都需要控制,因此在FCS-MPC 策略中,qZSI 的代價函數需要3 個權重系數,如式(8)所示[7]。
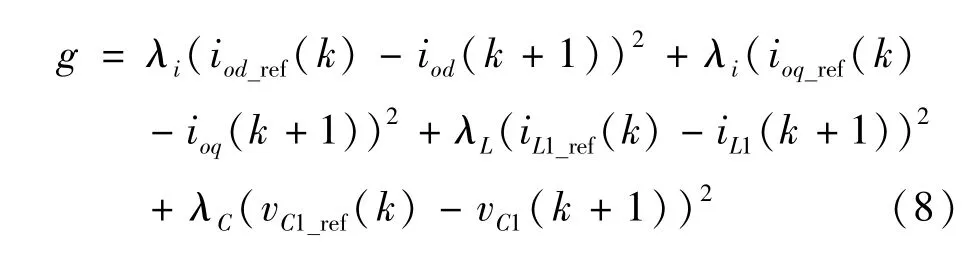
式中,vC1_ref(k)和iL1_ref(k)分別是電容電壓參考值和電感電流參考值;iod_ref(k)和ioq_ref(k)為輸出電流參考值;λi、λL、λC分別為輸出電流、電感電流和電容電壓的權重系數,只有選取合適的權重系數,qZSI才能正常工作。
對于圖1 中負載參數已知的獨立負載,通過式(9)可以得到控制對象各個控制量的參考值。
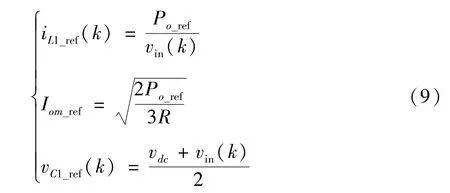
式中,Po_ref、Iom_ref分別為參考輸出功率、參考輸出電流的相電流幅值。
3 級聯模型預測控制策略設計
由式(8)可知,傳統FCS-MPC 中代價函數存在3 個權重系數,由于缺乏合適的權重系數整定原則,因此增加了系統調試的難度。S-MPC 策略的出現很好地解決了FCS-MPC 權重難以整定的問題,對于存在多個被控對象的系統,提供了一種簡單且實用的方法。
3.1 級聯模型預測控制策略設計
由于阻抗網絡中電感電流的特殊性,當qZSI 處于非直通狀態時,電感電流下降;當qZSI 處于直通狀態時,電感電流上升。由此,可以根據電感電流的預測值來判斷下一個控制周期是否為直通狀態[8]。若判斷下一個控制周期為直通狀態,則直接輸出直通矢量;若為非直通狀態,根據級聯模型預測控制的原理,先計算式(10)中電容電壓的代價函數,從7個非直通矢量中選出2 個最優電壓矢量,然后將這2 個電壓矢量代入式(10)中輸出電流的代價函數中計算得到1 個最優電壓矢量,用于下一個控制周期。由此可見,S-MPC 可以消除MPC 中的權重系數。圖3為qZSI 的S-MPC 策略整體控制框圖。

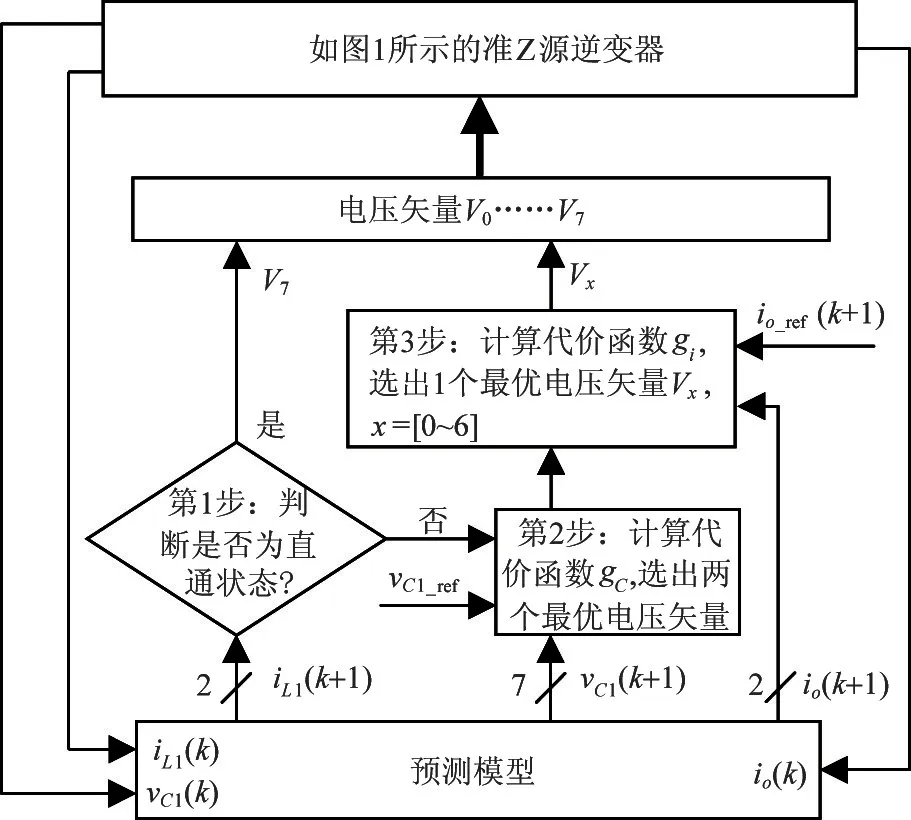
圖3 qZSI 的S-MPC 策略整體控制框圖
3.2 數字控制延時補償
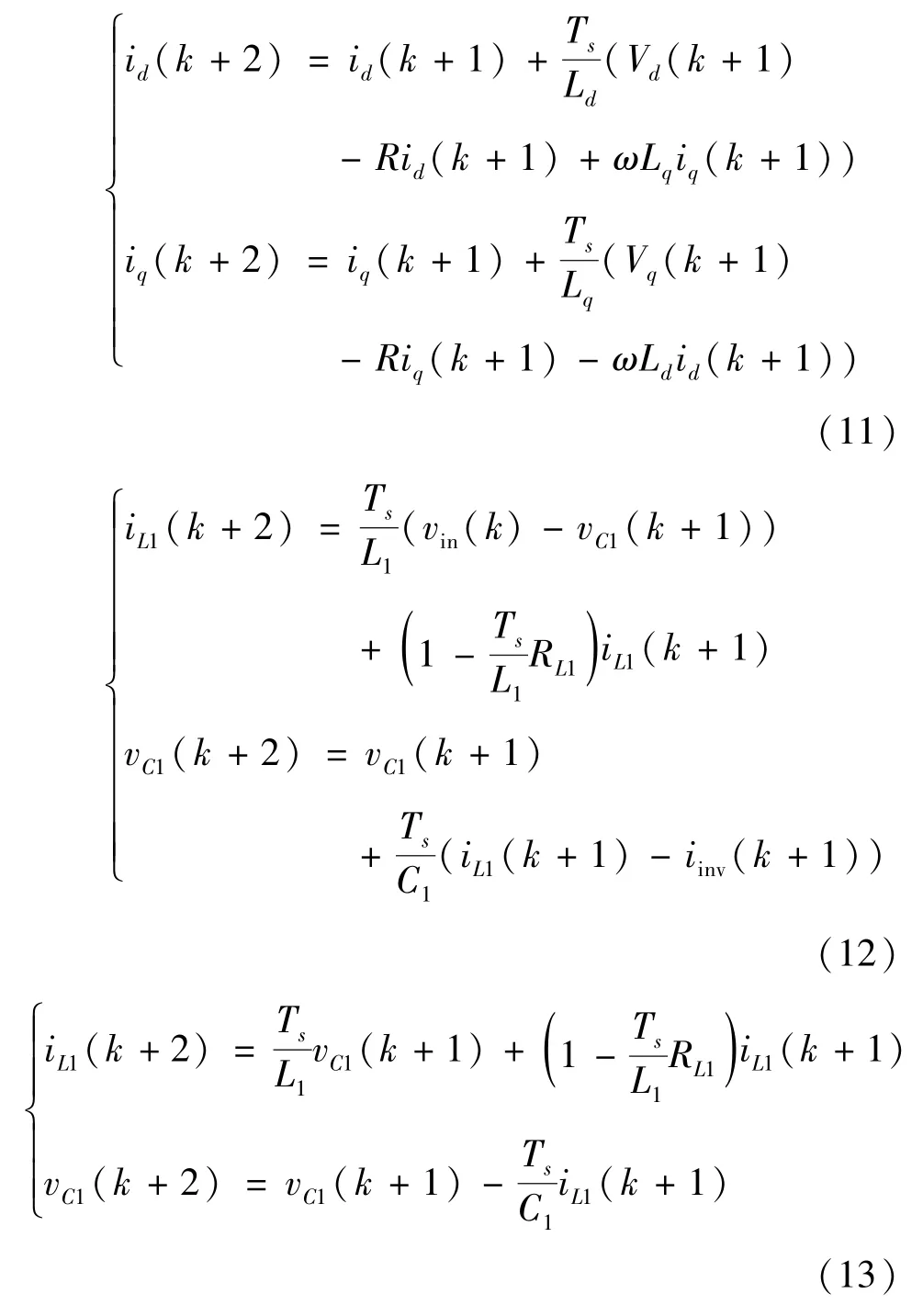
考慮到數字控制中存在大量的計算,計算所得的最優開關狀態會在下一個控制周期中輸出,而在這之前將繼續使用前一個開關狀態,這將導致系統輸出延時,影響系統的控制性能。本文采用第(k+2)個采樣時刻的預測值進行代價函數計算,以補償輸出延時。補償方法如圖4 所示。起始時采樣tk時刻的系統變量x(k);在預測計算前,應用前一個控制周期tk+1計算得到的最優開關狀態S(k);在當前開關狀態S(k)的基礎上,利用式(3)、(5)、(7)估算tk+1時刻的狀態x(k+1);然后將該估算值作為起點,利用式(11)、(12)、(13)對tk+2時刻所有開關狀態下預測值xp1(k+2)~xpn(k+2)進行計算。
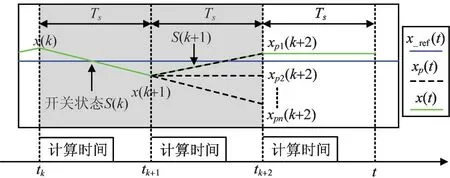
圖4 延時補償控制策略
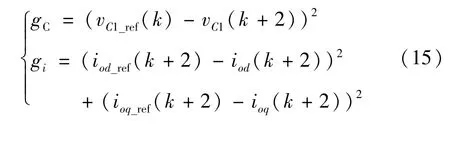
最后,根據代價函數式(15)計算下一控制周期的最優開關狀態S(k+1),并在下一個控制周期tk+1開始時刻直接輸出。另外為了進一步提高系統控制性能,利用矢量角補償法來計算輸出電流未來參考值,式(14)為計算輸出電流未來參考值的公式[23]。

式中,io_ref(k)為當前時刻輸出電流參考矢量,io_ref(k+2)為輸出電流矢量的第(k+2)時刻參考值。
通過式(14)可計算第(k+2)時刻的d、q軸參考值iod_ref(k+2)、ioq_ref(k+2),將代價函數式(10)修改為
4 參數自適應模塊及Lyapunov 證明
由于MPC 控制對控制量的預測,需要準確的電氣參數信息。實際可能不方便獲得準確的負載電氣參數R和L,且實際運行過程中,電阻會隨著溫度上升而增加,電感會隨著磁場飽和影響而下降。因此,設計對負載參數變化具有強魯棒性的自適應的級聯模型預測控制具有實際意義。
考慮到實際過程中電阻和電感值會發生變化,可假設電阻和電感模型為
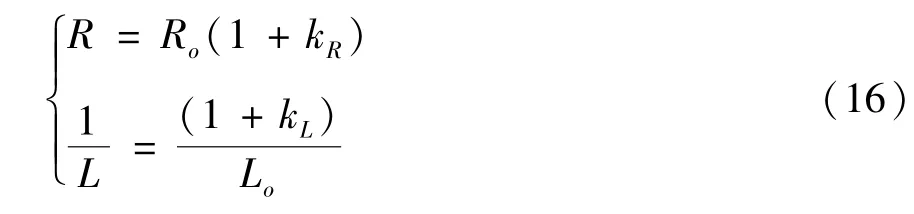
式中,Ro和Lo為MPC 算法中所使用的電阻和電感值,kR、kL分別為電阻和電感的誤差系數。
將式(16)代入式(3)得電流真實值遞推式:
式中,ed(k)、eq(k) 為d、q軸上的總擾動,其表達式為
根據自適應控制的思想,可將式(3)的預測模型改為參數自適應預測模型:
式中,上標P、M分別表示預測值和采樣值,^表示估計值,設計d、q軸總擾動自適應律:
式中,Ke為估計器增益,為第(k-1)時刻輸出電流預測值。
由式(19)、(20)可知,AS-MPC 不僅無需負載電阻信息,還可以對負載電感的誤差做出補償。
Lyapunov 穩定性證明定義總擾動估計的誤差為

當系統處于穩態時,有ed、為常值,且分別收斂于Vd、Vq,因此可認為0、0。將誤差項對時間求導并結合式(19)、(20),可得:

忽略電流采樣誤差,由式(17)可得:
將式(23)代入式(22),并結合式(21)最終整理可得:

選取正定標量函數:

其對時間的導數為
因為Lo、Ls、()2、()2均大于0,所以只要滿足Ke大于0,則使負定。根據Lyapunov 穩定判據,總擾動估計值會漸進穩定。
5 實驗結果
為驗證本文提出的AS-MPC 策略有效性,搭建了如圖5 所示的qZSI 的實驗平臺。
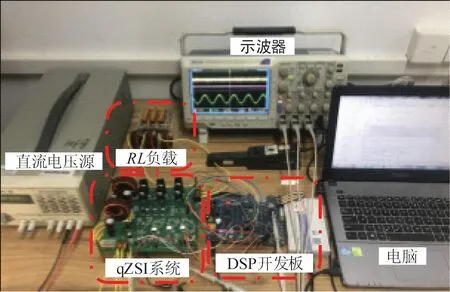
圖5 樣機實驗平臺
所搭建實驗平臺,功率管選用MOSFEST,型號為IRF640N,圖1 阻抗網絡中D選用肖特基二極管MBR10200,驅動芯片為 IR2110,控制芯片為TMS320F28335DSP。qZSI 系統主要參數見表2,系統輸出電壓頻率為50 Hz。

表2 qZSI 系統實驗參數
基于vin=30 V,Po_ref=60 W,vdc=40 V,由式(9)計算可得iL1_ref=2 A、Iom_ref=2 A、vC1_ref=35 V的條件下,比較S-MPC 和AS-MPC 兩者控制性能。
5.1 延時補償實驗
在AS-MPC 策略下進行延時補償對比實驗,比較不加延時補償與加延時補償系統的性能,實驗結果如圖6 所示。由于電感電流在直通時上升斜率大,在非直通時下降斜率小,當未加延時補償時,延遲一個采樣周期輸出開關狀態會導致電感電流的紋波較大,且平均值明顯超過了電感電流參考值,輸出電流諧波也略大。通過延時補償后,電感電流紋波減小且平均值與參考值更接近,輸出電流的諧波也得到了改善。
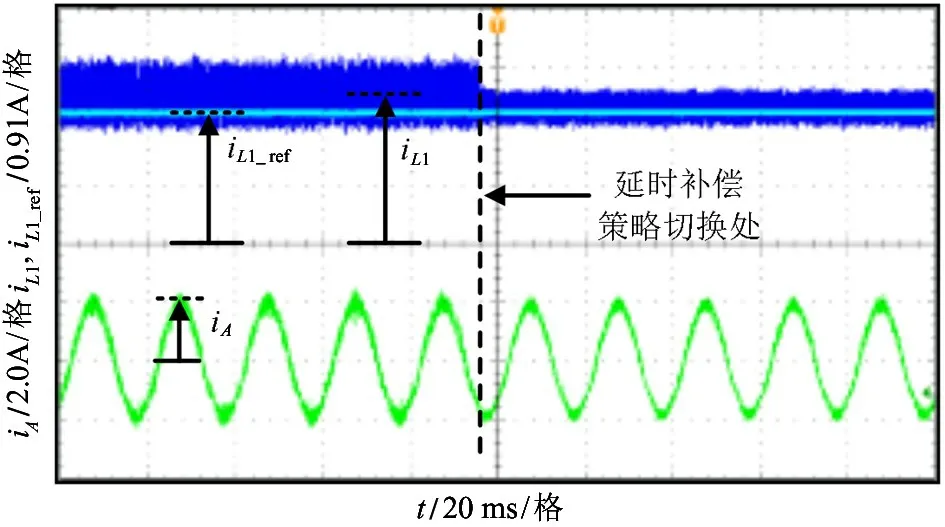
圖6 在qZSI 系統中,AS-MPC 延時補償實驗結果
5.2 穩態性能實驗
圖7(a)和(b)分別為S-MPC 策略和AS-MPC策略的穩態性能實驗對比,兩者算法中所使用的電氣參數一致,均為表2 中參數。由實驗對比結果可知,兩種控制策略的各個控制對象均得到了良好的控制。其中,S-MPC 策略的輸出電流總諧波失真(total harmonic distortion,THD)為8.12%,AS-MPC策略的輸出電流THD 為7.80%。由于本qZSI 系統中負載電感小,所以實驗中輸出電流THD 較高。
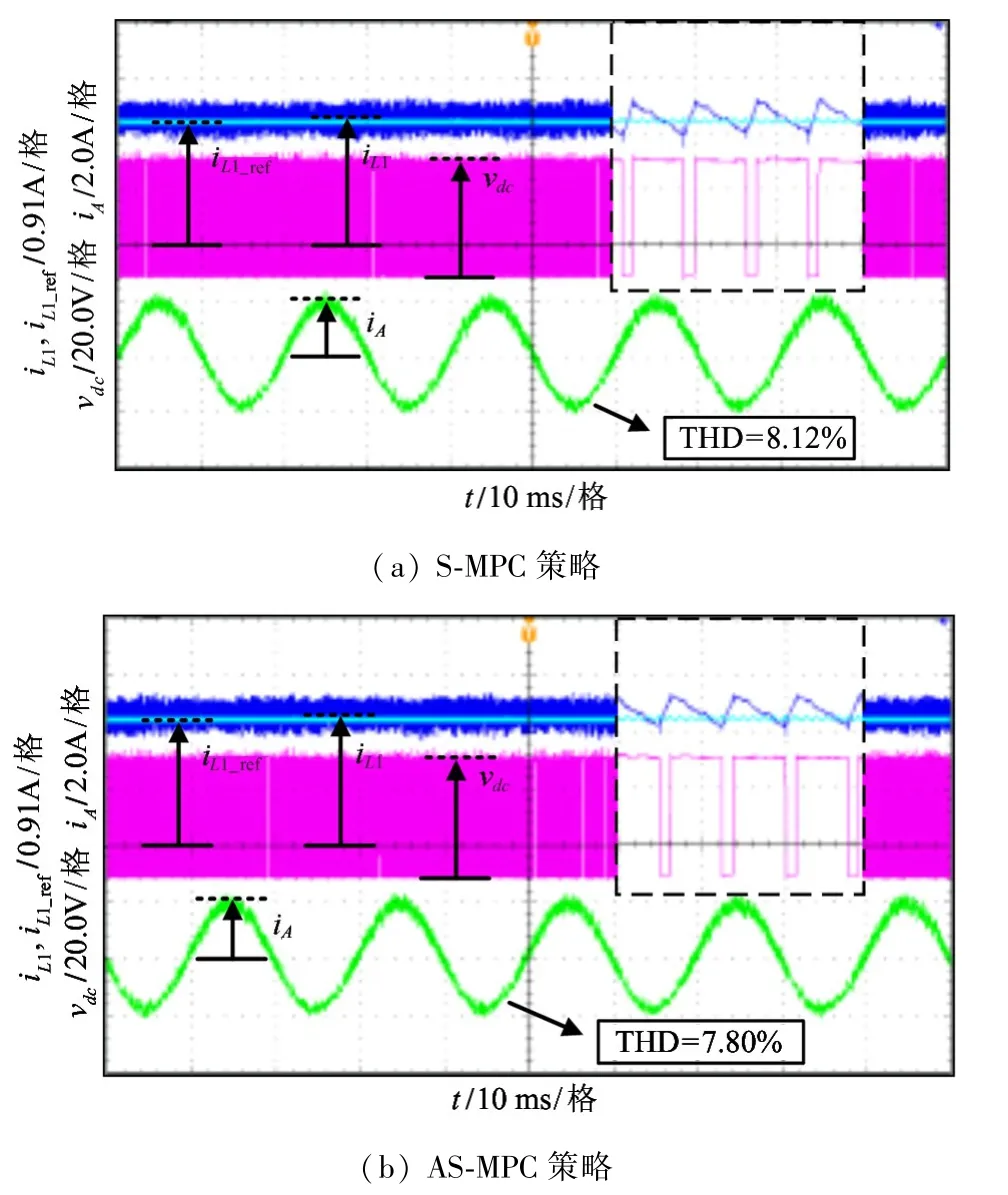
圖7 S-MPC 和AS-MPC 穩態工作實驗結果
本系統S-MPC 算法設計過程中未考慮參數誤差和未建模動態誤差,而在AS-MPC 策略中將所有未知信息當作總擾動。因此,AS-MPC 具有更優異的穩態控制性能。
5.3 動態性能實驗
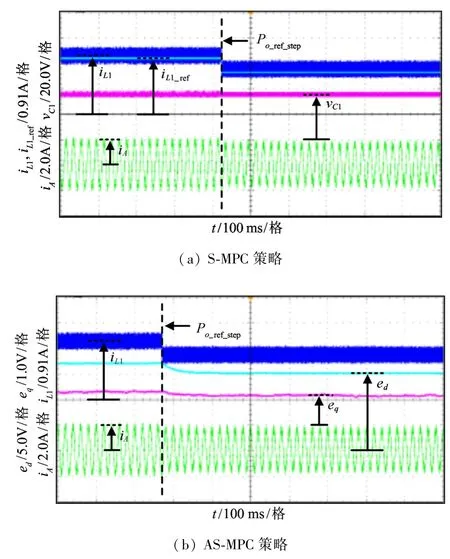
圖8 S-MPC 和AS-MPC 動態實驗,輸出功率從60 W 階躍至45 W 實驗結果
5.4 參數自適應對比實驗
為驗證AS-MPC 策略的參數魯棒性,設計了電阻、電感參數不匹配實驗。
5.4.1 負載電阻R的參數自適應對比實驗
考慮到在實際運行中,電阻會隨著溫度改變而發生變化。為模擬電阻不匹配現象,在S-MPC 的DSP 程序中,設置Ro=20 Ω 為實際電阻2 倍,Lo=3 mH。然而,AS-MPC 實現中,電阻相關項被當做綜合擾動,無需電阻參數,因此兩種控制策略實驗對比如圖9(a)和(b)所示。雖然兩種控制策略都能實現對輸入電流、電容電壓和輸出電流的穩定控制,但是,S-MPC 控制輸出電流THD 為9.32%,而AS-MPC控制輸出電流THD 為7.80%。由此可見,相比SMPC,AS-MPC 方法無需電阻參數,同時對電阻攝動具有強魯棒性。
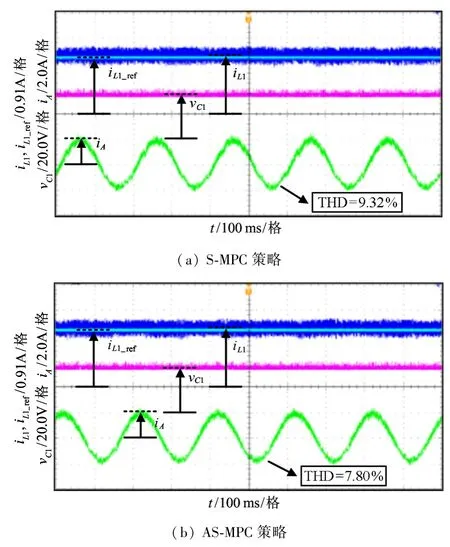
圖9 Ro=20 Ω 條件下S-MPC 和AS-MPC 的實驗結果
5.4.2 負載電感L的參數自適應對比實驗
在實際的工作過程中,不僅負載電阻會發生變化,負載電感也會隨著磁場飽和程度不同而改變。在S-MPC 和AS-MPC 算法中,設置Ro=10 Ω,Lo=2 mH,其余條件一致,比較兩者控制性能,實驗結果如圖10(a)和(b)所示。由圖10 可知,當電感參數與實際參數不匹配時,兩種控制策略均能實現輸入電流、電容電壓和輸出電流的穩定控制。但是,圖10(a)中采用S-MPC 策略,輸出相電流的THD 為8.57%;圖10(b)為采用AS-MPC 策略,輸出相電流的THD 為8.21%。由此可知,相比S-MPC 策略,AS-MPC 策略對負載電感的攝動同樣具有較強的魯棒性。
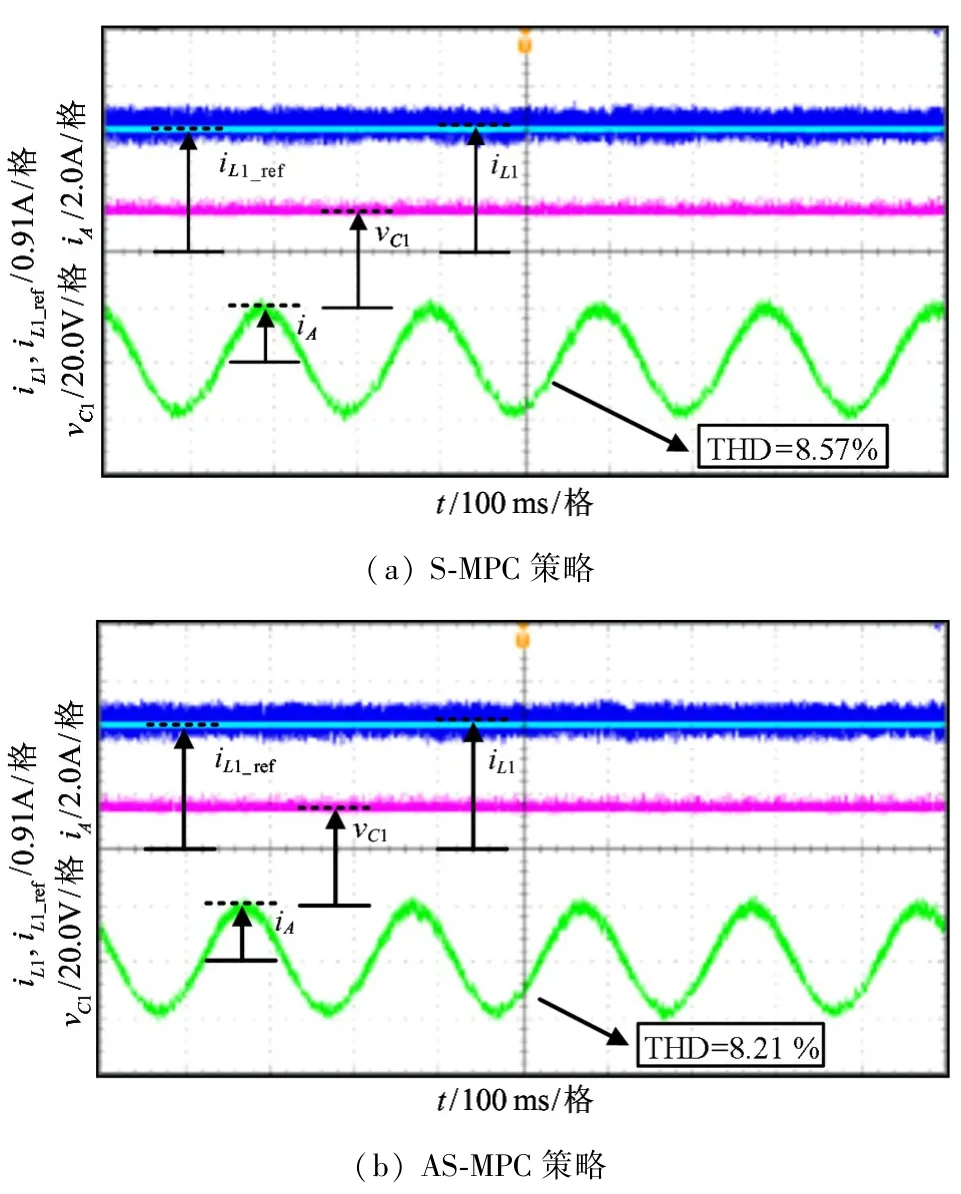
圖10 Lo=2 mH 條件下S-MPC 和AS-MPC 的實驗結果
6 結論
針對傳統FCS-MPC 策略需要設計權重系數的問題以及控制性能依賴于精確模型參數的缺點,本文提出一種適用于qZSI 的AS-MPC 策略。通過被控對象的優先級,依次計算各自對應的代價函數,并將參數誤差當作總擾動,采用自適應方法進行估計,從而消除了權重系數并實現對負載電氣參數攝動具有強魯棒性。同時,考慮AS-MPC 數字控制系統存在輸出延時以及參考指令滯后的問題,給出延時補償方法和矢量角參考指令補償方法。實驗結果表明,所提出的AS-MPC 策略具有無權重系數、結構簡單、對參數攝動魯棒性強、輸出電流諧波低、動態響應快速等特點。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52