基于分散PV-BES協調架構的孤島直流微網電壓控制
2021-11-11 07:10:24馬紅明耿泉峰霍雨佳王朔
電氣傳動 2021年21期
關鍵詞:系統
馬紅明,耿泉峰 ,霍雨佳,王朔
(1.國網河北省電力有限公司營銷服務中心,河北 石家莊 050000;2.浙江工業大學機械工程學院,浙江 杭州 310023)
近年來,光伏發電(photovoltaic,PV)已成為主流分布式能源。PV具有分布廣、零排放的優點,是邊遠地區很有前景的能源解決方案[1-3]。與傳統集中發電相比,PV具有分布式特性,它依靠微電網(microgrid,MG),是利用太陽能的有效途徑[4-7]。MG集發電、負荷、儲能于一體,可以持續穩定地提供電能,支持多種負荷,同時保持低前期成本和較短前置時間。除了傳統MG外,可擴展插拔式(plug-n-play,PnP)MG已經成為學術界和工業界研究的熱點[8-10]。PnP MG可以進一步降低設計和安裝成本,并允許用戶在需求增長時有機地增加電網的支撐能力。直流MG因其可靠性、效率高,控制簡單等優點而倍受關注,有利于孤島PnP MG的應用[11]。目前,PnP MG已經成為解決農村地區能源貧困問題的一個有效解決方案。為了實現PnP MG的高模塊化和可擴展性,設計的關鍵因素與傳統MG有較大不同[12],除了高度模塊化的硬件結構外,還需要開發完全獨立于通信的分散控制系統,其中,下垂控制是最常用的分散控制方法,可實現MG的電壓調節和功率分配。與并網MG系統不同的是,在孤島MG系統中,沒有主電網支撐能量和穩定電壓,功率平衡需要由MG自身調節來維持。通常采用下垂控制系統來平衡發電與負載之間的功率不平衡。然而,由于電池儲能(battery energy storage,BES)系統的荷電狀態(SOC)限制和充放電功率限制,BES系統的調節能力有限。因此,當BES飽和時,需要用PV發電作為母線調壓器。PV除了最大功率點跟蹤(MPPT)模式外,光伏變流器還應能夠在下垂控制模式下運行,以提高系統的直流母線調壓能力[13]。為了在無通信的情況下同時實現PnP MG的功率分配和模式轉換,文獻[14]提出了一種帶直流母線信號的分散模式自適應控制技術,以實現無通信的下垂控制協調。文獻[15]將分散控制方法應用于PnP微電網系統的遠程電氣化。這種分散控制方法比增加一個中央控制器和一個通信線路具有更高的可靠性、靈活性和可擴展性。除了模式自適應,光伏發電需要能夠在母線電壓控制模式下運行,而目前大多數光伏產品只考慮最大功率跟蹤控制。此外,BES系統通常采用傳統的下垂控制[16-17]。應用于光伏發電時,其性能會變差。在母線控制模式下,特別是在輕載情況下,母線電壓調節很弱。由于氣候條件的不同,光伏參數變化很大,這也增加了控制系統的設計難度。因此,可能會有非常大的超調量,從而損壞系統或導致安全問題。因此,對于PV來說,在其運行過程中需改進下垂控制,使其既具有魯棒性,也有一定經濟性[18-19]。
為了解決上述問題,本文提出了一種基于PV-BES協調架構的PnP MG電壓控制方法,該方法可在PV發電主導模式下,利用BES系統補償暫態能量,在不增加任何附加元件的情況下,也能保持系統電壓在可接受的范圍內。此外,該方法屬于一種分散式無通信控制,能夠無縫模式轉換,具有更強的魯棒性,非常適用于PnP MG。
1 分散PV-BES協調控制設計
圖1所示為PnP MG的結構圖。
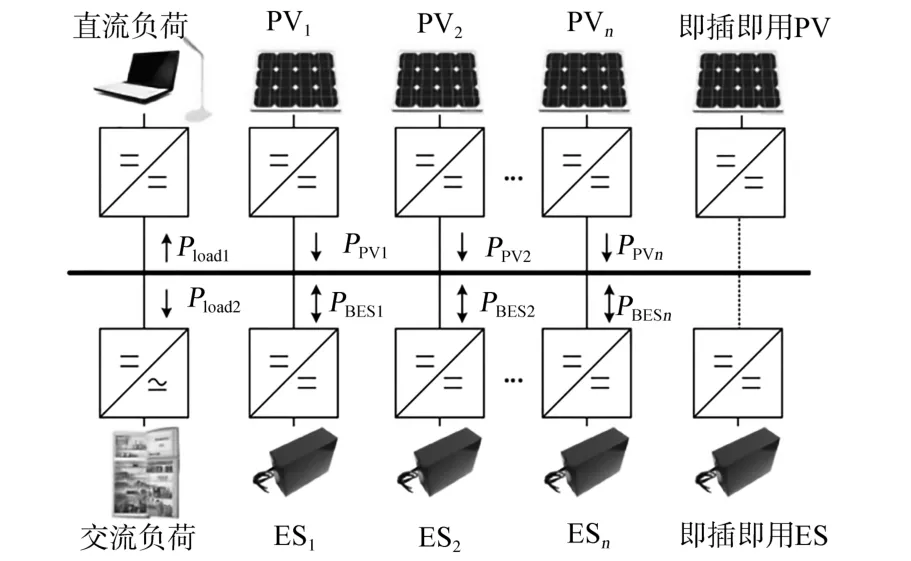
圖1 可擴展PnP MG的結構圖Fig.1 Scalable Plug-n-Play microgrid
為了在直流微電網中實現PV和BES的PnP特性,本文提出了一種完全非通信的分散控制系統。控制系統分別包含BES變換器和PV變換器的獨立控制器。采用所提出的控制方法,當新的光伏組件或BES組件安裝到MG中時,現有變流器的控制參數不需要進行任何調整。在存儲控制和發電控制兩種模式下,均能保持直流環節電壓調節的魯棒性和快速響應。圖2為直流母線電壓信號的通用下垂協調。
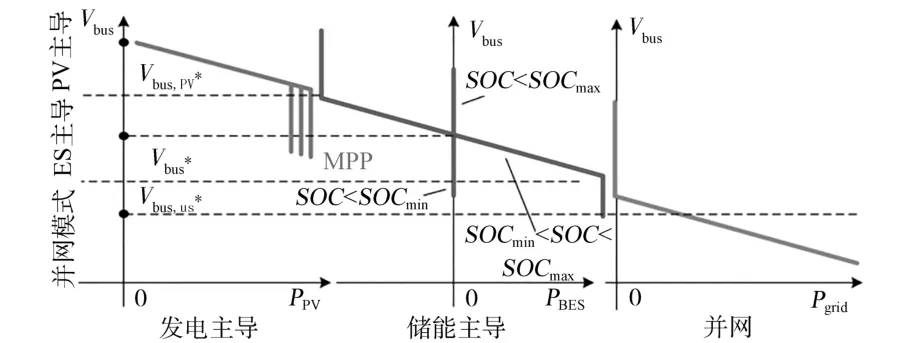
圖2 基于直流母線信號的分散模式自適應Fig.2 Decentralized mode adaptive using DC bus signaling
1.1 PV變流器的控制方法
圖3為所提模式自適應PV控制圖。該控制方法含內環控制PV輸出電流、中間環控制PV端電壓和外環為V-I下垂控制環。外部環路的輸出Vbus經過一個飽和器,其上限設置為MPPT電壓VMPP。通過設置PV下垂控制的額定母線電壓,使高于BES變換器的額定母線電壓,只要BES變換器調節母線電壓,PI控制器的輸出Vbus將始終飽和到VMPP。當BESs過度充電時,Vbus將比VPV,ref上升得更快,VPV,ref將減小到低于VMPP。因此,降低光伏組件的輸出功率,可實現光伏組件的無縫模式轉換。值得注意的是VPV,ref的飽和特性要求在下垂控制中增加積分器,這就解釋了為什么PV變流器控制采用V-I下垂控制,而不是I-V下垂控制。與典型的V-I下垂控制系統不同,該PV控制器有三個控制回路。它需要兩個回路(vPV回路和iPV回路)來穩定PV輸出功率,而不是BES應用中簡單的電流回路。并且由于MPPT控制的帶寬比PV電壓環慢得多,在穩態下,iPV=iPV0。因此,可以使用iPV作為最大功率跟蹤控制器的參考值,以減少電流傳感器的數量,而不是使用iPV0。此外,該方法為V-P下垂控制,利用PV測量的功率代替直流母線側測量的電流,進一步減少電流傳感器的數量。對于提出的PV控制系統,總共只需要一個電流傳感器。最大的內部控制環帶寬是由開關頻率限制的,每個控制環與其相近控制環通常有5~10倍帶寬差。因此,增加控制回路的數量會使外回路的動態性能變差。本文提出的BES變流器控制器將提供動態補償,以幫助在PV主導模式下實現電壓調節,以解決上述問題。
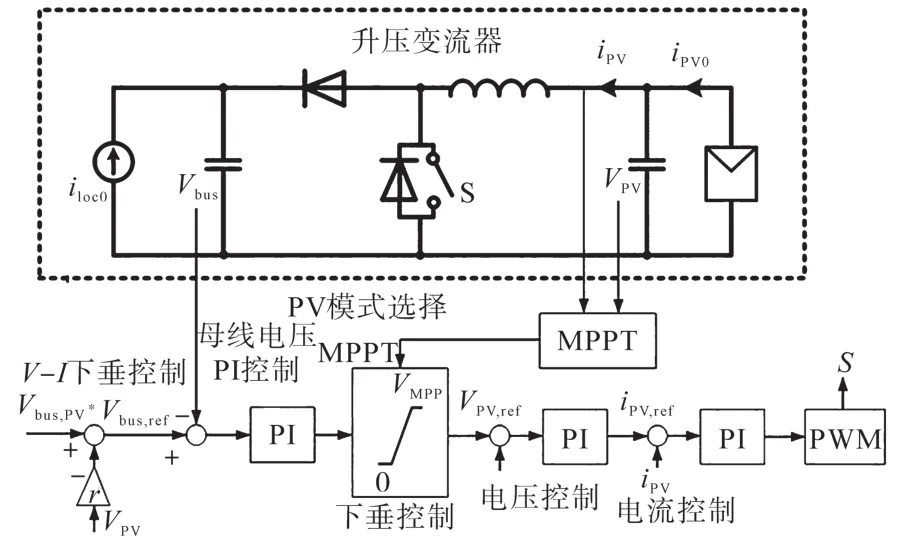
圖3 所提模式自適應PV控制圖Fig.3 Diagram of PV converter controller with seamless mode selection
1.2 BES變流器的控制方法
如上所述,PV下垂控制在母線電壓調節方面的動態性能相對較差。此外,PV變換器的功率流是單向的。因此,在零負載情況下,如果BESs不能進一步吸收能量,由于能量不能消耗,母線電壓將保持在峰值過調值。因此,即使在發電控制模式下,也必須保持BES變換器的動態調節能力。與PV變換器不同,BES變換器不需要復雜的模式轉換。可使用I-V下垂控制。在I-V下垂控制中,只有一個電流環被使用。帶寬可以比V-I下垂控制高很多。隨著BES輔助PV下垂控制,在儲能主導和發電主導模式下,均能保持高性能的動態響應。
傳統I-V下垂控制通過一個低通濾波器(LPF)和一個高通濾波器(HPF)解耦成兩條路徑。LPF路徑能夠提供穩定狀態下的功率分配和功率均衡能力。采用HPF路徑作為動態補償路徑來補償暫態能量。當LPF和HPF的時間常數相同時,二者的組合性能與傳統的I-V下垂控制相似。上述解耦設計具有以下優點:1)不同的電流限制可以放在兩個路徑上。主功率流由LPF路徑決定。HPF路徑對能量交換影響不大,對BES的SOC水平影響不大。因此,即使LPF路徑飽和,BES動態補償路徑也能保持主動。2)兩種路徑可采用不同的下垂系數。LPF路徑可以有一個較大的值m1來縮小母線電壓穩態誤差。HPF路徑可以有一個相對較小的m2值,以避免噪聲的影響。對于穩態分析,可以忽略HPF路徑的影響。
本文在BES的I-V下垂控制中增加了SOC項,實現了SOC的自收斂。與現有改進下垂控制不同,該方法在下垂線路上增加了一個離線控制,以更好地適應直流母線電壓信號。此外,傳統I-V下垂控制的輸出電流與電壓誤差成正比,它包含一個SOC斜坡項。具有附加項時,當BES的SOC水平高于SOC*時,輸出電流略有增加;當SOC低于SOC*時,輸出電流略有減小。因此,多個BES之間的SOC可以達到收斂。
2 系統穩定性分析
除了下垂控制器外,PV控制器還有一個三重環結構(包括PV電流環、PV電壓環和直流母線電壓環)。因此,控制參數必須仔細選擇,以避免控制回路之間的相互作用。伯德圖可以清晰地顯示各控制回路的分頻,指導各控制回路的設計。對于包括V-I下垂控制器在內的整個系統,由傳遞函數模型推導出狀態空間模型,更便于評價系統的整體性能。
2.1 傳遞函數模型
圖4為帶BES HPF補償的控制方框圖。
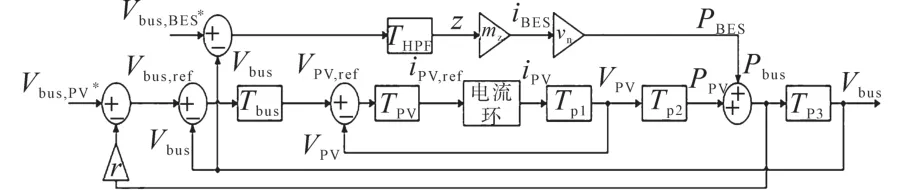
圖4 發電主導模式下Vbus下垂控制控制框圖Fig.4 Control block diagrams of Vbusdroop control under generation-dominating mode
由圖4可得,BES HPF補償可以給系統增加一個前饋控制路徑。光伏變流器的電流控制器可以采用高控制帶寬的遲滯控制器或PI控制器來實現。PV電流環的響應速度比外環快得多。為簡化研究,PV電流環的閉環傳遞函數可記為1。PV陣列具有非線性I-V特性。通常線性化的表達式可以寫成:

KPV總是負的,通過在光伏電壓VPV微分方程中加入擾動:

式中:CPV為光伏電容;IPV0為光伏電流初始值。
將式(1)代入式(2),時間Tp1可表示為

通過在光伏有功功率PPV計算中加入擾動:

將式(1)代入式(4),時間Tp2可表示為

式中:K′為增益,是一個常數,取決于PV的運行點。
由式(5)可知,MPPT穩態運行時:
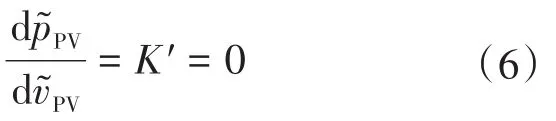
Vbus回路和VPV回路PI控制器的傳遞函數可表示為
在BES動態補償回路中HPF傳遞函數可表示為

式中:THPF為HPF傳遞函數;tHPF為HPF時間常數。
2.2 PV電壓控制環
由式(8)和式(3),可以得到VPV回路開環傳遞函數TOL,VPV:

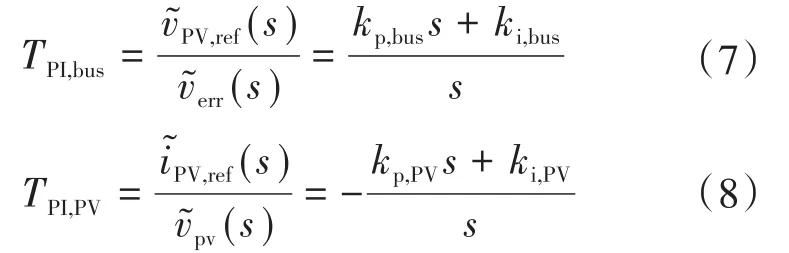
假設PV電流環分頻在4 kHz左右(開關頻率為20 kHz),VPV回路的分頻至少要是其1/5,也就是800 Hz左右。圖5為VPV開環傳遞函數的伯德圖。由圖5可知,當KPV在-0.01~-0.1范圍內變化時,交叉頻率保持在717 Hz附近,相位裕度在 88.5°~94.2°范圍內,其中,三條曲線分別是KPV為-0.01,-0.1和-0.05時的PV電壓開環傳遞函數曲線,故PV電壓環對PV參數變化具有魯棒性。
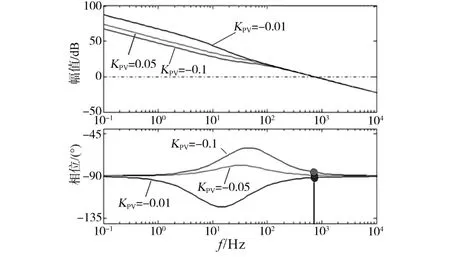
圖5 光伏電壓回路的伯德圖Fig.5 Bode diagrams of PV voltage loop
2.3 直流母線電壓控制環
通過使用現有的BESs來實現補償。雖然在發電主導模式下BES是飽和的,但它仍然可以提供動態補償,不會造成大量的能量流。控制圖見圖4,Vbus開環傳遞函數為

式中:TCL,VPV,Vbat,Tp3分別為PV電壓的閉環傳遞函數、電池電壓和時間常數。
圖6為BES HDF補償的母線電壓回路伯德圖,其中,增益K′是一個常數,取決于PV工作點。圖6中,三條曲線分別是K′為1.8,0.02和0.2時的直流母線電壓開環傳遞函數曲線。由圖6可知,交叉頻率始終保持在1 200 Hz左右,相位裕度K′變化90°左右。盡管PV電壓環內部存在限制,但交叉頻率仍能保持在較高的值。因此,BES補償回路作為獨立于PV參數的前饋回路,可以使系統對PV參數變化具有更強的電阻性,提高系統的動態性能。因此,采用BES補償,即使在發電控制模式下,直流母線電壓調節也能保持魯棒性,并具有良好的動態性能。

圖6 BES HPF補償的母線電壓回路伯德圖Fig.6 Bode diagram of bus voltage loop with BES HPF compensation
2.4 基于狀態空間模型的系統穩定分析
為了評估包含V-I下垂控制的整個系統的性能,由于下垂控制器與內環輸出Pbus之間存在交互作用,傳遞函數方法將變得過于復雜。因此,利用狀態空間模型對系統進行穩定性評估。系統的閉環狀態方程可表示為

式中:X,A,B,U為狀態方程系數。
對于圖1所示的系統,可以選擇狀態向量為

對傳遞函數進行拉普拉斯逆變換,得到各狀態變量的微分方程,最后可得系統矩陣A:
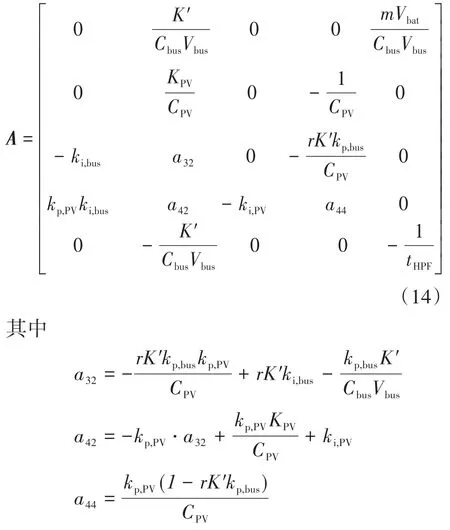
在狀態矩陣由式(14)給出的情況下,圖7為主導特征值隨PV工作點變化情況。
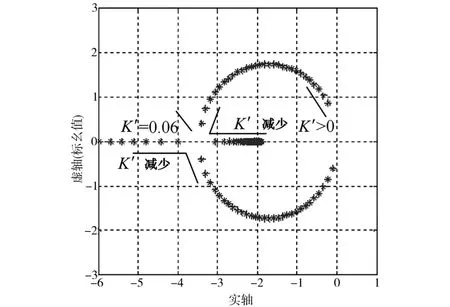
圖7 含BES補償的系統特征值Fig.7 Dominant eigenvalues of overall system
當K′>0時,系統是穩定的。當K′<0.06時,主特征值變為一對虛部小的共軛特征值(ω<1.7 rad/s)。只有當K′<0.06(幾乎在 MPP點上)時,主特征值才會共軛;振蕩頻率非常低,ω<1.7 rad/s。但是由于譜儀補償的引入,譜儀的高頻HPF的作用,使得主特征值更接近虛軸,動態響應不可避免地會變慢。
3 仿真分析與實驗驗證
為驗證本文所提方法的可行性與有效性,本文對不同負荷狀態下PV變流器控制模式由MPPT控制轉變為下垂控制進行仿真和實驗研究。仿真系統相關參數如下:儲能系統電壓,母線電容Cbus=660 μF,控制器參數kp,bus=3.5,ki,bus=100,kp,PV=10,ki,PV=2,內阻r=1/100,光伏電壓V*bus,PV=53 V,光伏電容CPV=200μF,控制器參數m1=1,m2=1,時間常數tLPF=0.01,時間常數tHPF=0.01,儲能電壓VBES=48 V。
圖8為無BES HPF補償的PV-BES下垂控制協調仿真結果。
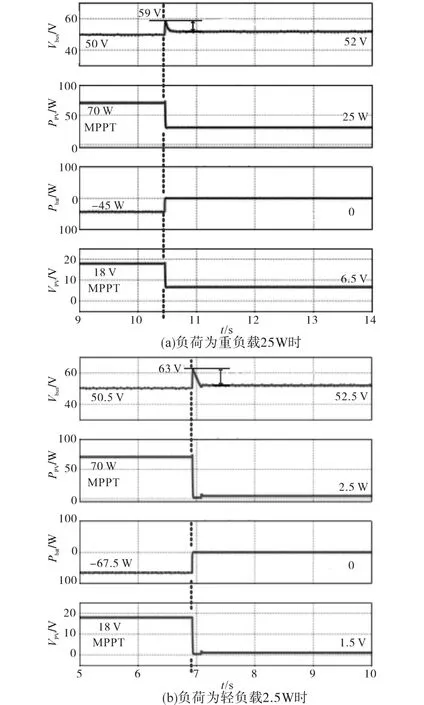
圖8 無BES高功率濾波器補償時PV-BES協調控制仿真結果Fig.8 Simulation results of PV-BES droop control coordination without BES HPF compensation
由圖8可以看出,負載為25 W時,PV暫態時刻母線電壓有14%的超調。切換到下垂控制。在負載較輕的情況下,超調量增加到20%,遠遠超出了可接受的電壓波動范圍。隨著光伏發電額定值的提高或負載的減少,電壓峰值甚至可能進一步增加。
采用BES HPF補償的PV-BES協調控制仿真結果如圖9所示。在圖9a中,負載為25 W時,PV控制模式切換到下垂控制的暫態母線電壓只有4.8%的超調。圖9b中2.5 W負載時,超調量仍保持在4.7%左右。雖然母線電壓需要較長的時間才能穩定下來,但始終保持在一個非常小的波動范圍內,這對MG系統的影響可以忽略不計。采用BES高頻濾波器補償后,BES的功率在暫態時不會立即變化到零,而是緩慢地達到零,從而阻止母線電壓的上升。
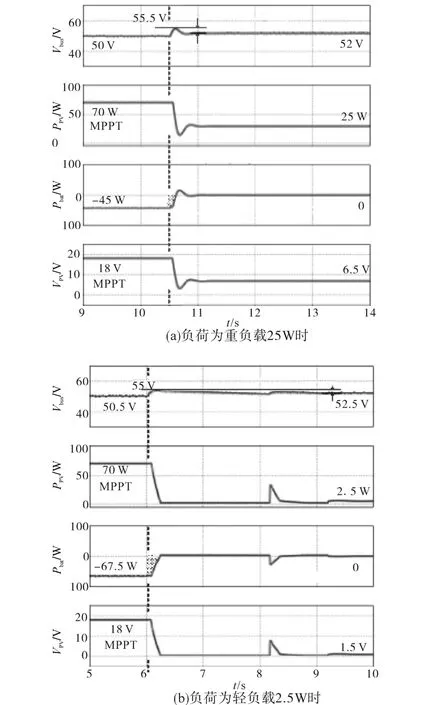
圖9 含BES高功率濾波器補償的PV-BES協調控制仿真結果Fig.9 Simulation results of PV-BES droop control coordination with BES HPF compensation
本文還通過實驗驗證了所提方法的有效性和優越性,實驗裝置如圖10所示。PV模擬器用于模擬PV輸出。轉換器由TI F28379d DSP控制。參數設置同上述仿真系統相關參數。圖11為不同BES HPF時間常數下PV-BES協調控制暫態實驗結果。圖11a中,BES HPF未激活或tHPF=0,PV切換到下垂控制的暫態過程中,直流母線電壓有較大的過沖,與圖8a的仿真結果一致。圖11b中tHPF增大到0.01,在BES HPF補償的幫助下,瞬態過程在3 V超調的情況下變得更加平滑。圖11c中tHPF進一步增大到0.05,瞬態超調量進一步阻尼到2 V左右。由此可見,本文所提方法的電壓調節性能良好。
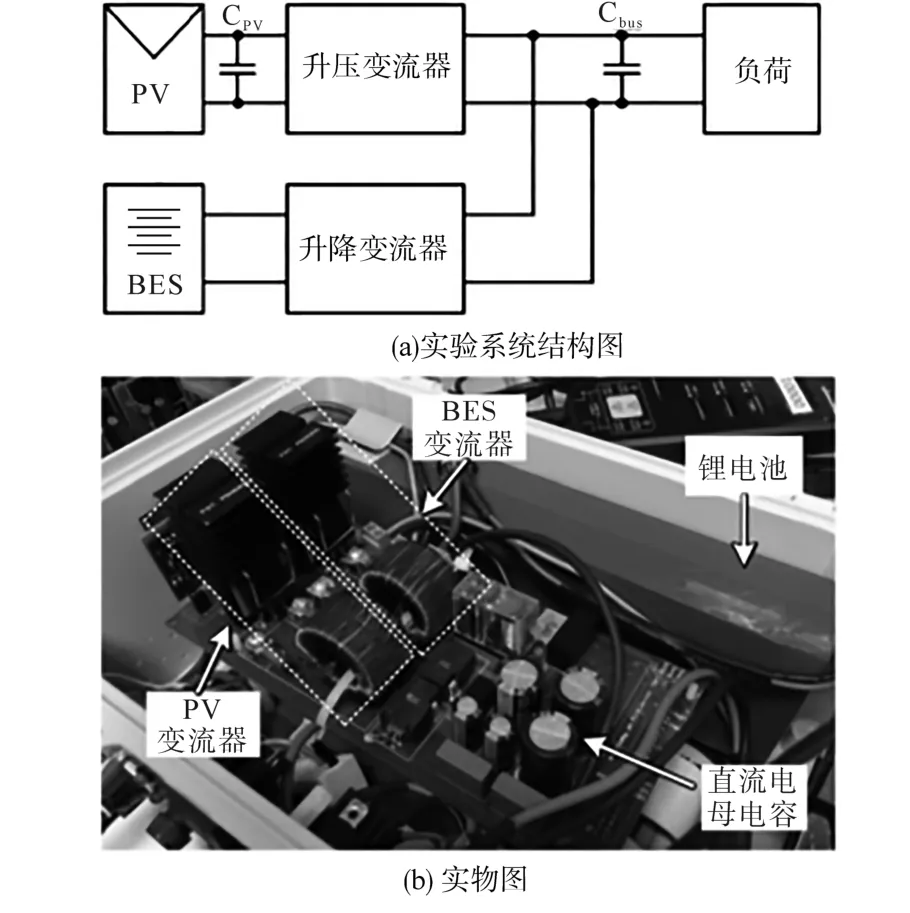
圖10 實驗系統圖Fig.10 Experimental system diagram
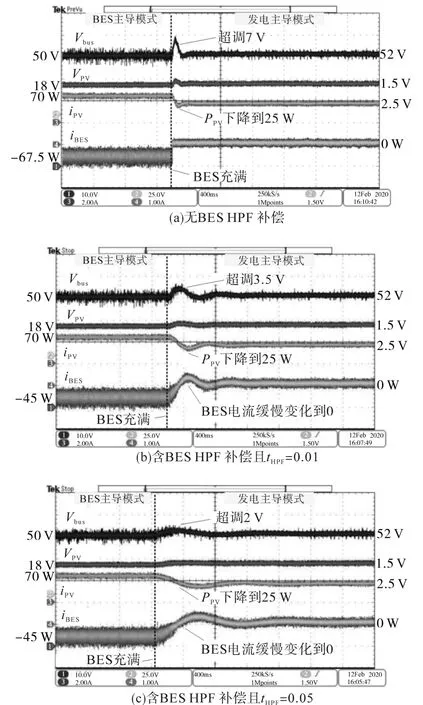
圖11 PV-BES協調控制實驗結果(負荷為25W)Fig.11 Experimental results of PV-BES coordination control(load is 25W)
圖12為2.5 W負載下PV控制模式由MPPT變為下垂控制的實驗結果。超調量保持在2 V左右,波形與仿真結果如圖9b所示吻合較好。
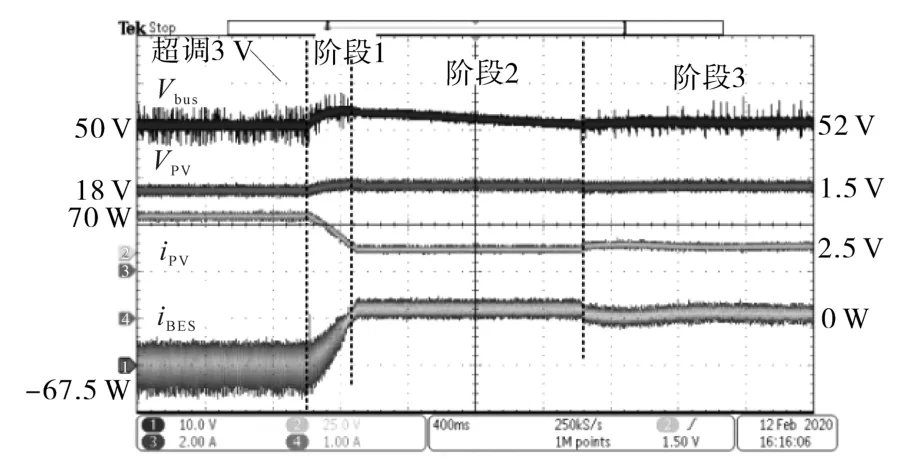
圖12 PV-BES協調控制實驗結果(負荷為2.5W)Fig.12 Experimental result of PV-BES coordination control(load is 2.5W)
從所有的結果可以看出,瞬態過程分為三個階段(由于穩定時間較長,在圖12中更加明顯)。在第1階段,BES完全充電,母線電壓升高,由于HPF防止母線電壓過沖,BES充電電流緩慢下降;在第2階段,光伏輸出功率降低到低于負載,母線電壓降低。HPF通路將始終阻礙母線電壓的變化。因此,在此階段BES將會放電;第3階段,母線電壓降至下垂控制器設定的值,BES高頻濾波器的輸出趨于零,達到新的穩態。
4 結論
本文提出了一種PV-BES協調控制方法,克服了PV發電控制模式下母線電壓調節的控制問題。整個控制方案保持了分散的、少通信的方式,可用于即插即用微電網(PnPMG)。所提出的方法利用了現有的BES系統,通過解耦控制回路,即使在發電控制模式下,BESs仍能提供動態補償。最后,通過仿真和實驗對本文所提方法進行了驗證。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32