用于微電網的儲能變流器控制策略綜述
2021-11-11 07:10:08陳亞愛林演康周京華
電氣傳動 2021年21期
陳亞愛,林演康,周京華
(北方工業(yè)大學北京市變頻技術工程技術研究中心,北京 100144)
用于微電網的儲能變流器(power conversion system,PCS)是微電網內能量流和信息流交匯的樞紐,與常規(guī)PCS不同,它具備提供無功、諧波補償的能力,在并網、離網和并/離網切換工況下均能向負載提供良好的電能質量。為保證微電網擁有良好的電能質量、實現經濟效益,需采取切實可行的控制策略,目前對控制策略的研究越來越受到行業(yè)重視。本文在對現有應用于微電網的PCS科研成果進行深入分析的基礎上,歸納并總結各種控制策略的特點和適用場景。
1 用于微電網的PCS控制策略分類
根據實際應用場合及功能需求,不同的儲能系統(tǒng)采用的PCS結構不盡相同,若根據輸出電平數量,一般可分為兩電平、三電平和多電平等結構;若根據變換環(huán)節(jié)數量,可分為單級式、雙級式等結構。在低壓應用場合,PCS常用的是單級式兩電平結構,由于拓撲結構的限制,其直流側儲能介質電壓變化范圍較窄,該結構適用于一些端電壓隨SOC狀態(tài)變化比較小的儲能介質,如鋰離子電池等;若儲能介質為超級電容等,端電壓隨SOC狀態(tài)變化較大,則需采用在單級式PCS直流側加一級DC/DC變換器構成的雙級式PCS,該結構可拓寬直流側儲能介質的電壓變化范圍,適用于多種儲能介質,應用于各功率場合。本文的分析及歸類正是基于雙極式兩電平PCS開展的,其拓撲如圖1所示。
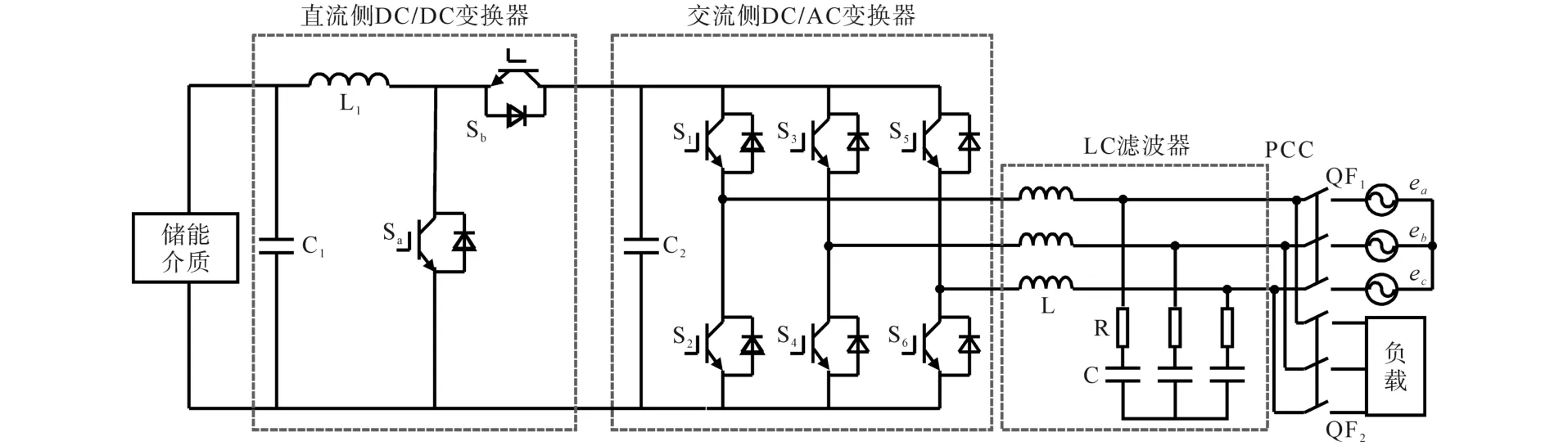
圖1 雙極式兩電平PCS拓撲示意圖Fig.1 Schematic diagram of bipolar two level PCS
為保證在任何工況下PCS都能向負載提供合格的電能質量,每種工作模式下需采取相應控制策略。用于微電網的PCS包含并網、離網和并/離網切換3種工作模式,其控制策略分類如圖2所示。
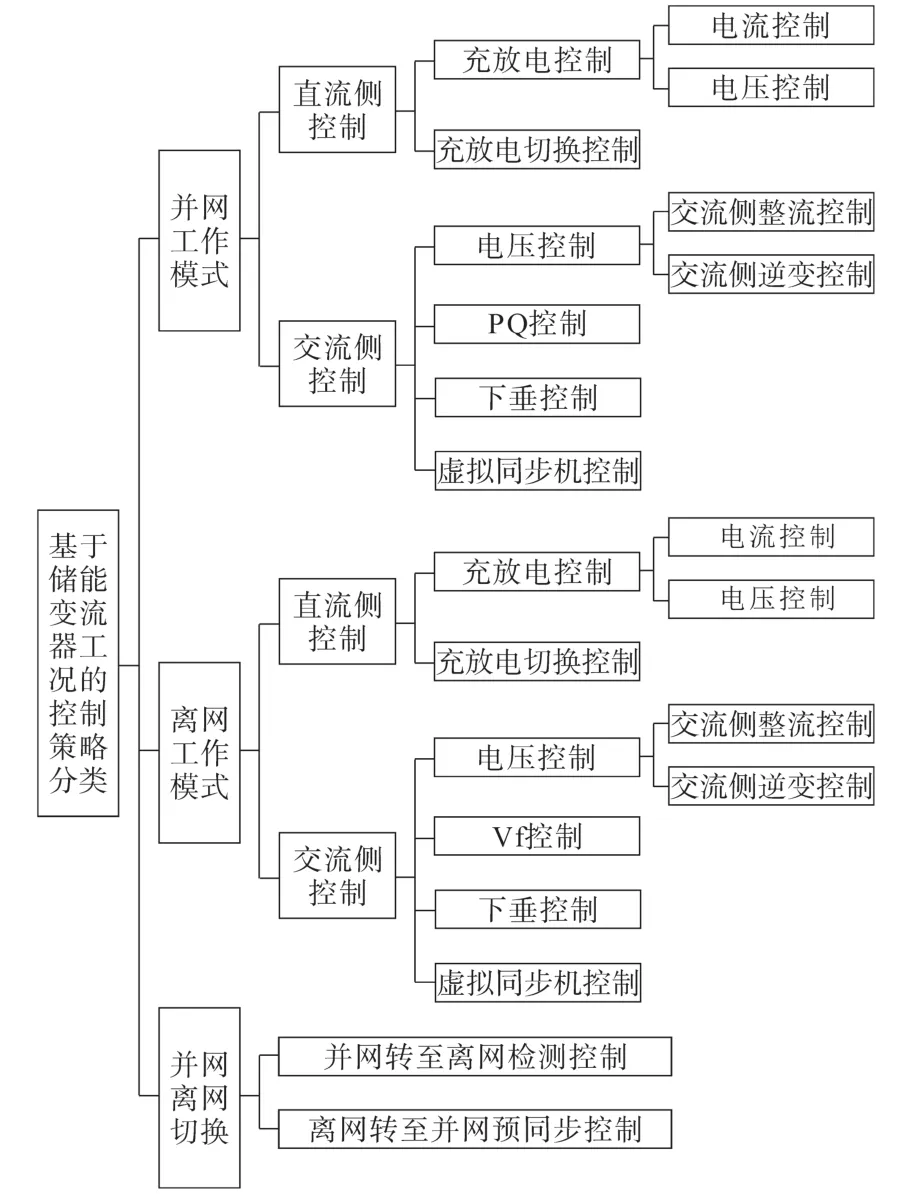
圖2 基于PCS功能的控制策略分類圖Fig.2 Schematic diagram of based on PCS functions control strategies classification
圖2中,并網、離網工作模式均包含PCS直流側和交流側控制。并網工作模式下的直流側控制又可分為充放電控制和充放電切換控制,充放電控制可分為電流控制、電壓控制兩種控制策略;離網工作模式下的直流側控制與并網相同,因此不再贅述。并網工作模式下的交流側可分為電壓控制、PQ控制、下垂控制和虛擬同步機控制(virtual synchronous generator,VSG)控制4種,電壓控制又可分為交流側整流控制和交流側逆變控制兩種。但由于VSG控制離網工作模式下較為常用且與并網時工作原理相同,本文把VSG策略放入離網模式下分析總結。離網工作模式下的交流側可分為電壓控制、Vf控制、下垂控制和VSG控制4種控制策略,此模式下的電壓控制和下垂控制與并網時一樣,因此不再贅述。并/離網切換模式可分為并網轉離網檢測控制和離網轉并網預同步控制。
2 PCS并網控制策略
2.1 直流側充放電控制策略
儲能系統(tǒng)需要根據外界需求靈活地在充電和放電模式之間切換[1],PCS直流側DC/DC變換器則要穩(wěn)定母線高壓側電壓,因此需對DC/DC變換器進行控制。
2.1.1 電流控制
電流控制通過檢測直流母線電壓生成電流環(huán)參考值且與電池側電感電流比較后,直接作用于DC/DC變換器,控制策略如圖3所示。
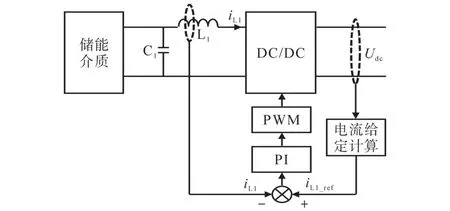
圖3 直接電流控制框圖Fig.3 Direct current control block diagram
電流控制精度高、動態(tài)響應快,但也會產生周期性的電流誤差[2],該控制策略適用于動態(tài)性能指標高的場合。
文獻[2]為緩解微電網間歇和波動性對儲能系統(tǒng)帶來的負面影響,采用小信號分析方法推導系統(tǒng)穩(wěn)定條件,采用互補型脈寬調制方式控制,并提出多滯環(huán)調節(jié)的控制方法,有效改善了儲能單元的充放電過程,提高了儲能的技術經濟性。但該控制策略忽略了瞬時充電電流和儲能單元SOC對控制的影響。文獻[3]考慮儲能單元SOC狀態(tài)和外部電壓狀態(tài)等約束條件,以DC/DC側電感電流為內環(huán),外部恒壓、涓流控制方式為電流環(huán)生成參考電流,保證儲能單元不會因過充過放造成不可恢復傷害,但實驗運行功率只有5 kW,若將該策略應用于實際,應提高功率繼續(xù)試驗。文獻[4]基于電池電流調節(jié)原理,在PV分布式電源給儲能單元充電算法中增加最大功率點跟蹤技術,提高儲能單元壽命且降低對電池電流測量精度的依賴性,能更好地利用光伏能量且更快達到100%電池充電狀態(tài)。
2.1.2 電壓控制
電壓控制是雙向DC/DC變流器根據PCS的輸入/輸出功率,對電池組進行充電/放電,維持DC/DC和DC/AC間直流電壓的恒定,電壓控制策略如圖4所示。
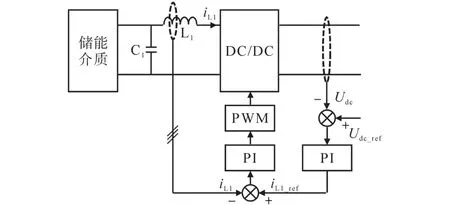
圖4 電壓控制框圖Fig.4 Voltage control block diagram
文獻[5]針對儲能單元研究提出一種多DC/DC和DC/AC模塊構成的PCS,提出恒流控制和穩(wěn)壓控制,實現多簇儲能單元同時充放電,并能保證恒流控制下充電電流很好地跟蹤放電電流,恒壓控制下中間直流電壓很好地穩(wěn)定在系統(tǒng)要求值,但該策略在兩種控制下均不能做到單位功率因數運行。文獻[6-7]提出一種基于直流母線電壓穩(wěn)定的儲能系統(tǒng)充放電控制策略,該策略通過控制穩(wěn)定的充放電電流,保證直流母線電壓穩(wěn)定在允許波動的合理范圍內;又利用儲能單元SOC狀態(tài)判斷實現儲能單元內部功率平衡。
對以上儲能單元充放電控制策略進行總結對比,將其各自特點列于表1中。
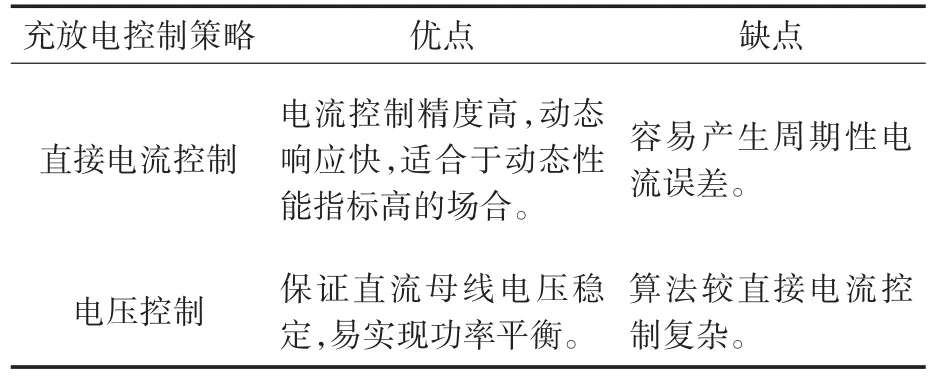
表1 充放電控制策略特點比較Tab.1 Comparison of charging and discharging control strategies
2.2 直流側充放電控制策略
儲能單元通過PCS與電網和負荷進行能量交換,其充放電控制直接影響微電網的供電質量,這便要求儲能系統(tǒng)能夠穩(wěn)定快速進行充放電響應,因此其充放電切換控制是研究熱點之一。
文獻[8]考慮分布式電源間歇性特點,并以供需功率平衡為基礎提出一種二次修正儲能單元充放電切換控制策略,即先以小波包對分布式電源輸出量的分解分量作為儲能單元充放電指令,并以功率平衡作為充放電指令的一次修正;其次以儲能單元模糊控制輸出量作為充放電指令的二次修正。該控制策略采用模糊控制對儲能系統(tǒng)SOC進行自適應控制,實現充放電指令的自切換,發(fā)揮儲能系統(tǒng)的容量效益,減小容量配置成本,并且能很好地滿足GB/T 34120中對PCS充放電切換的要求。文獻[9]以超級電容為儲能單元,分析其構成和工作原理,以超級電容SOC作為判定依據,設計充放電切換算法,保證系統(tǒng)自動跟蹤PCS輸出側能量狀態(tài),實時實現充放電自切換控制。但該控制策略僅考慮儲能單元的安全高效使用,未考慮輸出功率是否平衡且必須有儲能單元之間可靠的信息實時共享作為保障。文獻[10]為穩(wěn)定微電網內功率平衡、抑制直流母線電壓波動,將直流母線電壓分成5個區(qū)域,系統(tǒng)依據直流母線電壓所處區(qū)域判斷儲能系統(tǒng)工作模式及模式切換。該控制策略能實現儲能系統(tǒng)充電、放電和充放電切換模式的自由切換,同時抑制直流母線電壓波動,保證儲能單元長期安全、高效運行。但系統(tǒng)功率嚴重不平衡時,只是建議微電網適當切除負荷,并未對此做深一步研究。
2.3 交流側控制
2.3.1 整流控制
儲能電池充電時,PCS需工作在整流模式,使直、交流側之間得到穩(wěn)定的母線電壓。儲能電池充電時,DC/AC側控制策略分類如圖5所示。
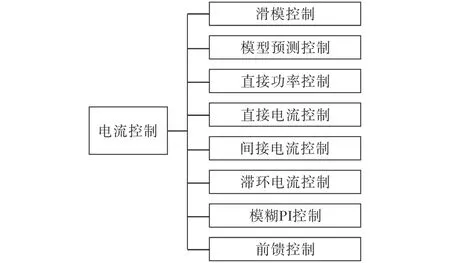
圖5 整流控制策略分類圖Fig.5 Schematic diagram of rectifier control strategy classification
滑模控制[11]是電壓外環(huán)采用滑模控制或雙環(huán)均采用滑模控制的一種控制策略,以PCS輸出直流電壓誤差為狀態(tài)變量構造指數衰減率切換面,通過對電流內環(huán)控制器進行設計,實現各變量的解耦控制。該控制策略具有良好的參數變化自適應性,改善PI控制的滯后性及對系統(tǒng)參數的敏感性,但各控制環(huán)設計較為復雜。
模型預測控制[12]是在每個周期對所有開關狀態(tài)下的電流、電壓、頻率或功率進行預測評估,并將矢量平面分為多個扇區(qū),判斷參考值所在區(qū)域,使得控制器輸出量為參考值所在區(qū)域最優(yōu)的電壓矢量。模型預測方法無需迭代計算尋優(yōu)且耗時少,但算法運算量大,對控制器性能要求較高。
直接功率控制有基于電壓定向、虛擬磁鏈和輸出調節(jié)子空間三種控制策略。基于電壓定向策略的交流側電感選取難度較大且對傳感器和采樣頻率依賴程度較高;基于虛擬磁鏈策略的物理量計算受參數變化影響較大,增大計算誤差;基于輸出調節(jié)子空間策略將輸入空間劃分為多個區(qū)域,通過開關矢量選擇調節(jié)系統(tǒng)狀態(tài),改善了基于電壓定向、虛擬磁鏈控制策略不足,具有更好的動態(tài)性能。
除了以上幾種控制策略之外,還有直接、間接、滯環(huán)電流控制策略、模糊PI控制策略、前饋控制策略等。限于篇幅,論文不再對這些控制策略進行詳細闡述。
2.3.2 PQ控制
PQ控制本質就是控制儲能介質的有功功率和無功功率。一般在主從控制時,從控的PCS采取PQ控制,此時儲能介質相當于受控電流源[13],PQ控制原理圖如圖6所示。
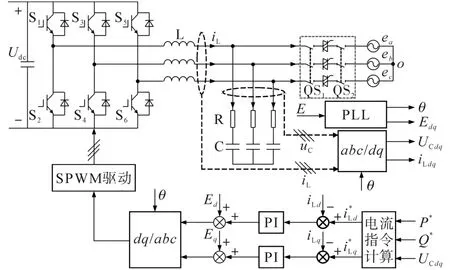
圖6 PQ控制框圖Fig.6 PQ control block diagram
PQ控制對應用場合有一定要求,即多適用于直流母線端輸出功率隨機性較大的電源,該控制下電源的輸出功率及微電網內部的負荷波動、電壓頻率偏移等由電網進行調整[14],從而使PCS按照給定的有功、無功指令值輸出;PQ控制不能支撐微電網的電壓和頻率,如果系統(tǒng)提供的電壓幅值和相位參考不穩(wěn)定,則PQ不能很好地應用于該系統(tǒng)。在微電網內,采取PQ控制的PCS作為從控制器運行時,必須跟隨主控制器運行,所以各微源之間要實現信號實時共享且保證通信有較高的可靠度;作為主控制器時可能會存在功率額定限制,所以要對微電網的孤島運行情況和負載消耗有一定的預估。
文獻[15-16]提出了一種前饋解耦的PQ控制策略。利用坐標變換,進行交直流量的變換,以d軸電壓進行定向,方便地通過id,iq實現對網側P和Q的解耦控制。引入前饋解耦的d,q軸獨立控制,采用電流PI調節(jié)器。前饋解耦控制如圖7所示。
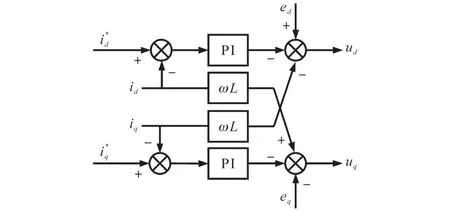
圖7 前饋解耦控制器Fig.7 Controller of feedforward decoupling
基于前饋解耦的PQ控制策略可以展現同步坐標系的優(yōu)點,有功電流和無功電流實現了解耦和獨立控制。PI調節(jié)器具有動態(tài)、靜態(tài)響應較好和頻率穩(wěn)定等優(yōu)點,實現無差調節(jié)。
文獻[17]基于下垂電壓控制,設計低增益狀態(tài)反饋器對微電網的有功、無功功率進行控制,通過產生正弦基準電壓,由電壓環(huán)跟蹤,該電壓環(huán)為電流環(huán)生成電流基準,并且該控制策略引入前饋狀態(tài),保證電能以良好質量入網。但該策略涉及到線性矩陣不等式問題,電壓環(huán)、電流環(huán)設計比較復雜。
2.3.3 下垂控制
下垂控制是模擬與同步發(fā)電機相似的下垂特性曲線作為PCS的控制方式。各分布式電源分別檢測自身的輸出功率,通過下垂特性獲得各自的頻率和電壓指令值,然后各自反向微調其輸出電壓的相位和幅值,最終達到系統(tǒng)有功平衡和無功合理分布的目標[13]。P—f/Q—U下垂控制結構如圖8所示。
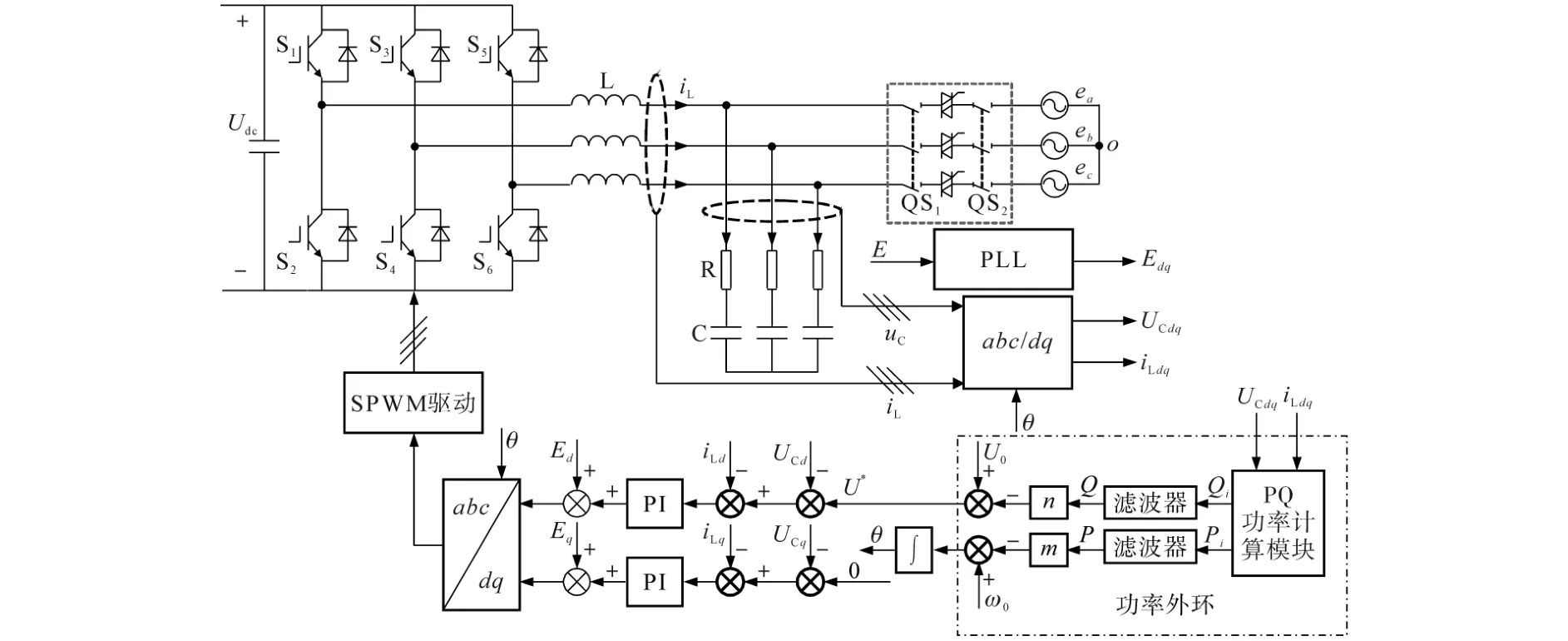
圖8 P—f/Q—U下垂控制框圖Fig.8 Block diagram of P—f/Q—U droop control
下垂控制的優(yōu)點:無需實現多臺PCS間的信息通訊,便能保證微電網中頻率電壓的統(tǒng)一,簡單可靠且成本低。下垂控制的缺點:基于虛擬阻抗的下垂控制加入虛擬阻抗使得輸出電壓存在偏差,影響輸出電壓控制精度;另外,輸出電壓指令可能會含有輸出電流的諧波成分,影響PCS輸出的電能質量。
傳統(tǒng)下垂控制策略往往根據線路阻抗特性忽略線路電抗的影響,采用頻率—無功,電壓—有功的控制調節(jié)策略,而微電網本身電壓等級較低,線路成阻性或阻感性[18];另外微電網容量相對較低,下垂控制中電抗的影響不容忽略。文獻[19]基于下垂控制提出輸出電流分解的虛擬阻抗回路方法,并分別合成正序和負序虛擬阻抗,保證在三相負載平衡下,利用較大的負序虛擬阻抗使并聯變流器負序環(huán)流電流最小;在三相負載不平衡下,設計動態(tài)調節(jié)負序電阻回路,使PCS輸出電壓的質量和負載分擔性能達到良好的平衡。文獻[20-22]在PCS并聯時,為保證線路阻抗不同情況下實現功率均分和環(huán)流抑制,基于下垂控制改進功率計算公式和無功補償環(huán)節(jié),實現功率均分和環(huán)流抑制,降低功率損耗并提高微電網系統(tǒng)的動態(tài)性能,但論文并未對負載突變時的功率分配不均問題做進一步研究。文獻[23]通過引入虛擬阻抗,解決線路阻抗不同的影響,提高負載突變時功率動態(tài)調節(jié)能力,實現系統(tǒng)功率精確分配。文獻[24-25]為解決傳統(tǒng)下垂控制具有的調節(jié)速度慢、功率分配不均問題,提出了基于下垂控制的分段自適應方法,可以通過分段自適應控制調節(jié)下垂系數,使系統(tǒng)獲得良好的動態(tài)響應速度、功率分配效果,提高系統(tǒng)電能質量。
對以上幾種并網下交流側控制策略進行總結對比,將其各自特點列于表2中。
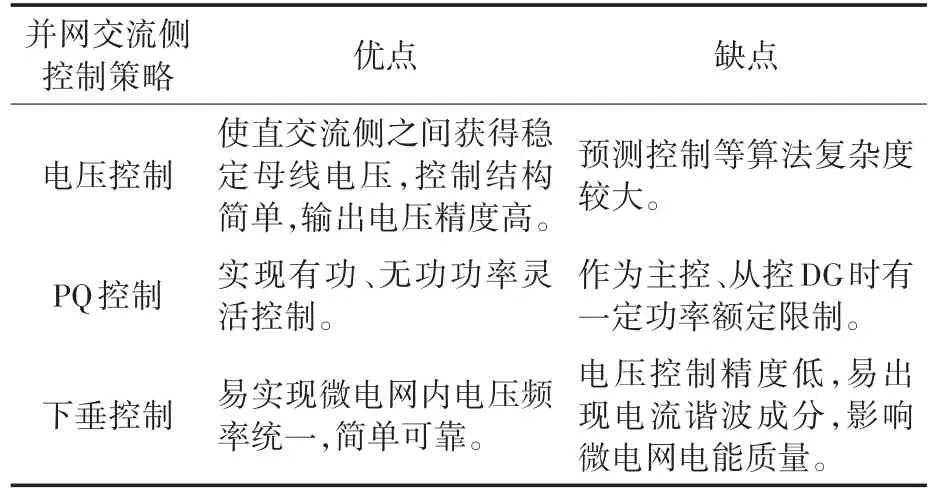
表2 并網交流側控制策略特點比較Tab.2 Comparison of grid-connected AC side control strategies
3 PCS離網交流側控制策略
3.1 Vf控制
Vf控制是PCS以輸出電壓、頻率指令值進行控制,能起到支撐微電網內的電壓和頻率的作用,常作為主控制器運行,此時,有功、無功功率由負載決定。Vf控制常采用電壓外環(huán)、電流內環(huán)的雙閉環(huán)控制策略,其控制策略如圖9所示。
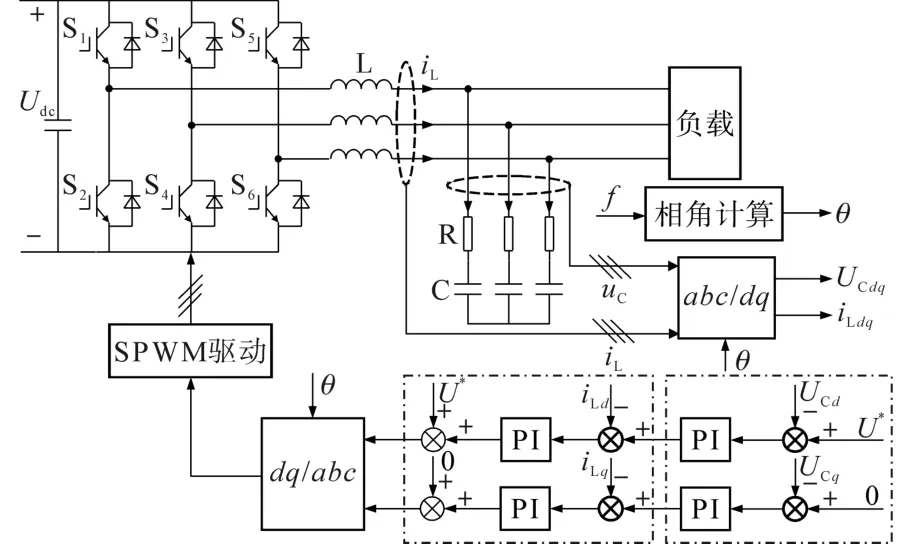
圖9 Vf控制框圖Fig.9 Vf control block diagram
Vf控制的優(yōu)點:電壓外環(huán)保證輸出電壓的穩(wěn)定,電流內環(huán)構成隨動系統(tǒng),實現對參考值跟蹤,同時兼顧系統(tǒng)穩(wěn)定性,增大系統(tǒng)相位裕度[26],對非線性負載擾動的適應能力加強,輸出電壓的諧波含量減小。雙環(huán)控制充分利用系統(tǒng)的狀態(tài)信息,動態(tài)性能好,穩(wěn)態(tài)精度高。Vf控制的缺點:多機并聯運行困難,不易實現準確均流[27]。
文獻[28-29]在電壓外環(huán)處添加模糊PI控制器、自適應PI控制器,并進行了電流的前饋解耦,既可以穩(wěn)定并/離網切換時由于電壓突變導致的系統(tǒng)不穩(wěn)定,又可以穩(wěn)定負載端電壓,提供參考信號作為電流內環(huán)的輸入。但是,模糊論域涉及復雜輸入量轉化和解模糊,計算過程較為復雜。并且在離網時,可能會由于分布式電源的不穩(wěn)定引起電壓電流的小幅變化導致并/離網切換時間延長幾秒鐘。
3.2 虛擬同步機控制
同步發(fā)電機通過控制輸入機械功率(Pm)穩(wěn)定輸出功率和頻率,通過改變勵磁電流產生的電磁功率(Pe)來控制輸出電壓[30]。因此,在虛擬同步發(fā)電機控制(virtual synchronous generator,VSG)中必須加入電壓、頻率和功率的閉環(huán)控制使其更真實地模擬同步發(fā)電機。VSG控制策略如圖10所示。基于VSG的微電網PCS擁有與傳統(tǒng)同步發(fā)電機一樣的穩(wěn)定性,改善系統(tǒng)的慣性,有利于分布式電源入微網。該策略以穩(wěn)定輸出功率為主,當負荷變化時,PCS仍能均分功率,既有利于微電網穩(wěn)定,又保證平滑并網運行。
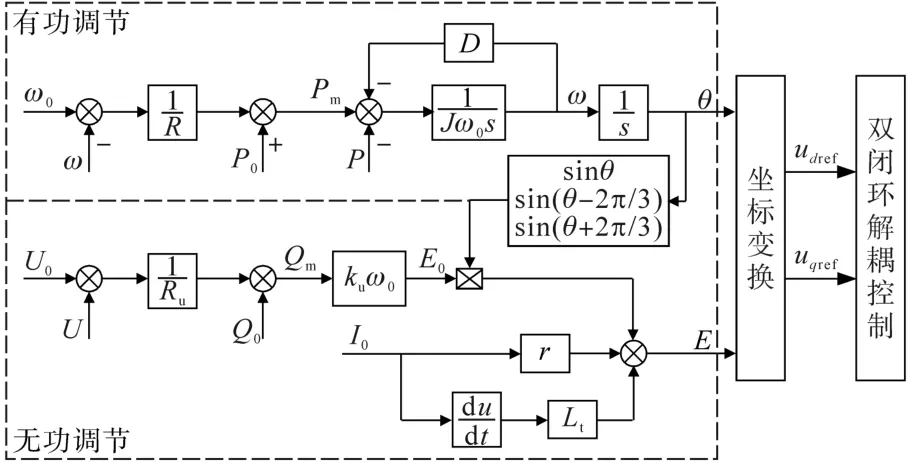
圖10 VSG控制框圖Fig.10 Block diagram of VSG control
VSG控制策略中存在固定系統(tǒng)參數不能保證系統(tǒng)的快速響應和穩(wěn)定性、dω/dt變化快慢影響系統(tǒng)動態(tài)性能問題。文獻[31-35]針對此問題,依據旋轉慣量與阻尼系數對系統(tǒng)的影響,提出了在不同階段系統(tǒng)根據運行特性動態(tài)調節(jié)旋轉慣量和阻尼系數,能夠有效減小系統(tǒng)的超調量、維持系統(tǒng)頻率穩(wěn)定。但該策略主要應用于離網運行模式,并網運行模式有待查驗,并且自適應旋轉慣量VSG參數整定比較復雜。文獻[36]分析控制參數對系統(tǒng)穩(wěn)定性的響應,利用VSG轉子和無功調節(jié)的特性設計頻率調節(jié)器,提高了PCS的動態(tài)、穩(wěn)態(tài)性能且能穩(wěn)定并網,但該方法僅分析VSG并網運行時的運行特性,且只進行了仿真分析,后續(xù)應對離網下各種工況分析并進行實驗研究。文獻[37]針對VSG虛擬慣性存在時,功率調度指令突變會造成PCS輸出的頻率、功率發(fā)生振蕩問題,采用矩陣二次型最優(yōu)控制,控制PCS的功率和頻率,優(yōu)化虛擬慣量,緩解其功率、頻率振蕩,防止因過流而停止工作。
對以上幾種離網下交流側控制策略進行總結對比,將其各自特點列于表3中。
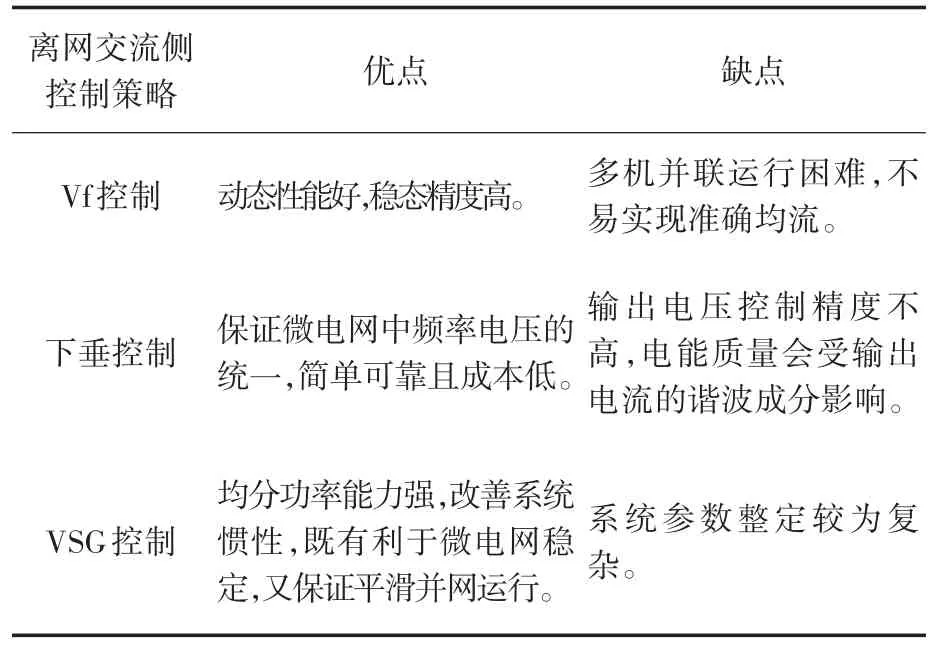
表3 離網交流側控制策略特點比較Tab.3 Comparison of off-grid AC side control strategies
4 并/離網切換控制策略
PCS在并/離網切換時,若不加控制,會出現電壓波動和沖擊電流等問題。為保證系統(tǒng)內電能質量的穩(wěn)定和轉換過程中不間斷供電,不影響用電負荷的穩(wěn)定運行,并/離網工況應平滑切換,這也是微電網比傳統(tǒng)供電系統(tǒng)的優(yōu)勢所在。由于并/離網切換時控制目標不同,其控制策略又分為并網切換至離網控制和離網切換至并網控制。
4.1 并網切換至離網檢測控制
PCS在并網時表現為電流源特性,離網時表現為電壓源特性,并網轉離網控制實質上是PCS的電流型控制轉至電壓型控制。為實現并/離網模式的切換,并網開關一般為靜態(tài)開關,通常選擇雙向晶閘管反并聯的開關電路作為靜態(tài)開關,由于這種晶閘管會在電網故障半個基波周期內脫網,因而學者提出電流過零點檢測、間接電流控制和電壓型控制等并網切換離網方法。
4.1.1 基于電流過零點檢測控制
電流過零點檢測是當電網發(fā)生故障時,PCS并網點處電壓發(fā)生跌落,電網電壓值低于預設最小值時,檢測電路會關閉并/離網開關。因此PCS在電流第一個過零點斷開電網,瞬間PCS從電流型控制轉為電壓型控制。文獻[38-39]對切換算法進行了詳細介紹,具體的切換流程為:檢測到電網故障并向并/離網開關發(fā)出關閉信號;檢測負載電壓和相位;當電網電流過零時,PCS轉為電壓型控制,其基準電壓來自負載電壓;最后調整負載電壓參考值至額定值。
電流過零點檢測控制結構簡單,應用廣泛,但無法對非計劃性孤島情況作出較好的應對。
4.1.2 間接電流控制
間接電流控制實質上是通過控制電感電壓實現調節(jié)并網電流的目的。間接電流控制等效電路如圖11所示,并網功率因數為1的矢量控制如圖12所示。
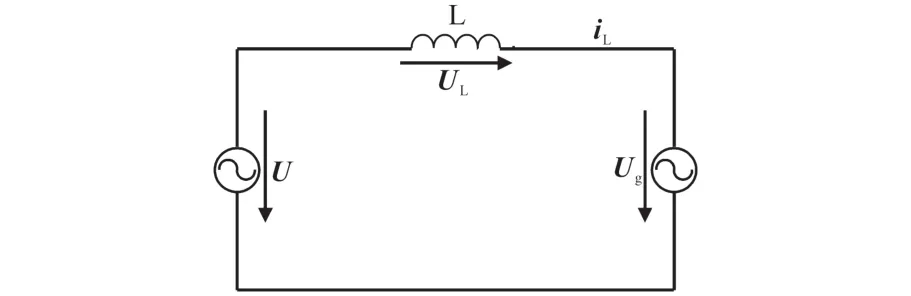
圖11 間接電流控制等效電路Fig.11 Equivalent circuit of indirect current control
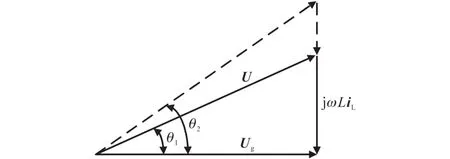
圖12 間接電流控制電壓矢量圖Fig.12 Diagram of indirect current control voltage vector
圖11和圖12中,U,Ug分別為PCS輸出電壓、電網電壓;UL為電感電壓。由圖11可見,可以通過控制θ實現電感電壓的調節(jié),且在功率因數損失較小的情況下,將U和θ進行解耦,實現并網有功、無功功率的控制。
文獻[40]為避免并/離網切換時電流輸出可能不穩(wěn)定,提出適合并/離網切換的間接電流控制策略,其控制策略如圖13所示。該控制外環(huán)為并網間接電流環(huán),內環(huán)為PCS輸出電壓環(huán)。并網時采用注入電流均方根值控制作為外部控制回路,離網時采用輸出電壓和輸出電容電流的瞬時控制。當電網故障時,由間接電流控制計算的U*將被進行限值,以保證臨界狀態(tài)負載的安全運行。
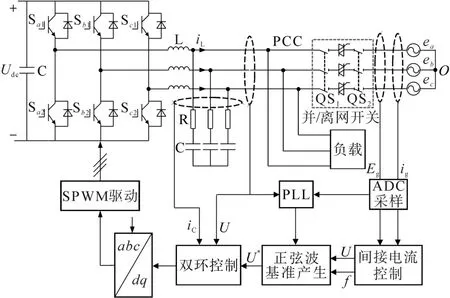
圖13 間接電流控制框圖Fig.13 Block diagram of indirect current control
并/離網工況下的間接電流控制最終目標均是PCS輸出電壓,因而可在并網切換至離網時有效降低暫態(tài)電壓電流沖擊,實現平滑切換。
4.1.3 電壓型控制
1)下垂控制。基于下垂控制策略的PCS接收到離網信號或被動離網時,先斷開并/離網開關QS1,QS2,使PCS斷開與電網連接,切換的瞬間U/f保持不變,且由負載決定PCS的輸出功率,PCS再根據有功、無功功率及下垂特性對PCS輸出電壓的幅值、頻率進行調整,使其支撐微電網內部的電壓、頻率,最后系統(tǒng)會在幾個基波周期內進入新的穩(wěn)態(tài)。下垂控制常適用于多臺PCS協調控制,但由于其為有差控制,無法將微電網的電壓恢復至并網的水平。離網模式下垂控制框圖如圖14所示。
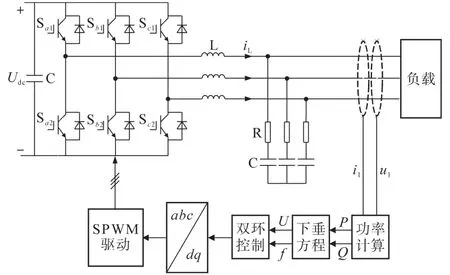
圖14 基于下垂控制的離網控制框圖Fig.14 Block diagram of off-grid control diagram based on droop control
2)VSG控制。VSG控制是系統(tǒng)有功功率決定功角特性,無功功率決定輸出電壓特性,功角和電壓通過同步發(fā)電機模型生成調制波,無需傳統(tǒng)的鎖相環(huán)技術。
文獻[41]闡述基于VSG控制的PCS并/離網切換控制策略,通過有功、無功功率控制功角特性和輸出電壓特性,VSG控制下PCS調壓、增加系統(tǒng)慣量的能力與同步發(fā)電機媲美。正因為具備同步發(fā)電機所具有的運行功能,故該控制策略能自動完成并網模式向離網模式的平滑切換[42]。其控制框圖如圖15所示。
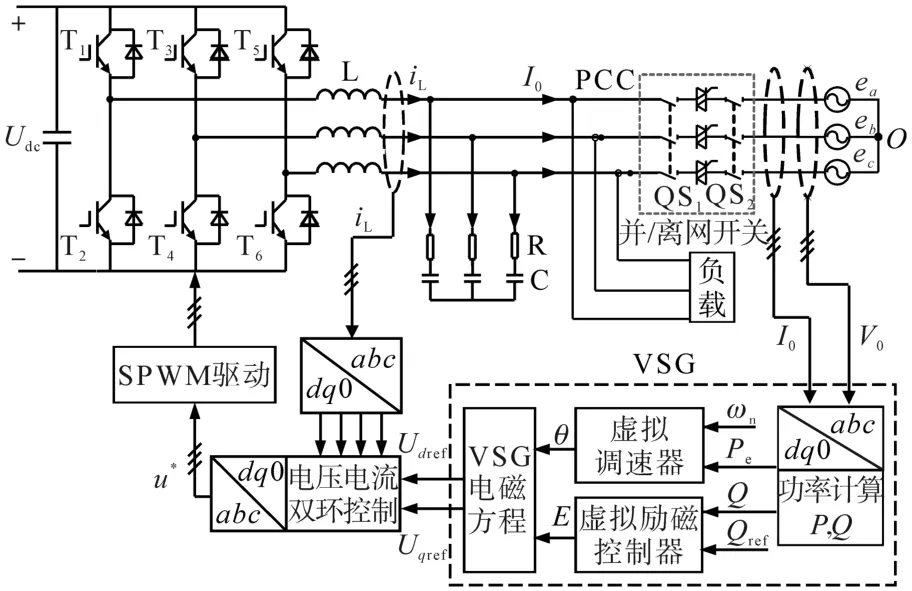
圖15 VSG并/離網控制框圖Fig.15 Grid-connected of VSG control block diagram
4.2 離網切換至并網預同步控制
PCS離網切換至并網時,電壓和頻率又將由電網支撐,故必須保證微電網和大電網連接時電壓幅值、相位和頻率的一致,才能減小并網電壓、電流沖擊,實現平滑切換。
文獻[43]改進傳統(tǒng)相位同步控制,采用新型相位同步方法,如圖16所示。圖16中,ω為下垂控制中有功頻率控制器輸出角頻率;Ugq,Uq分別為電網、微電網q軸分量;kθ為相位同步控制器積分系數。該控制策略可以直接調節(jié)微電網電壓相位與電網同步,消除頻率調節(jié)法對P-f下垂控制的影響,同時包含電網電壓的相位鎖存功能,能有效抑制離網轉至并網時負載對微電網電壓、頻率的擾動。
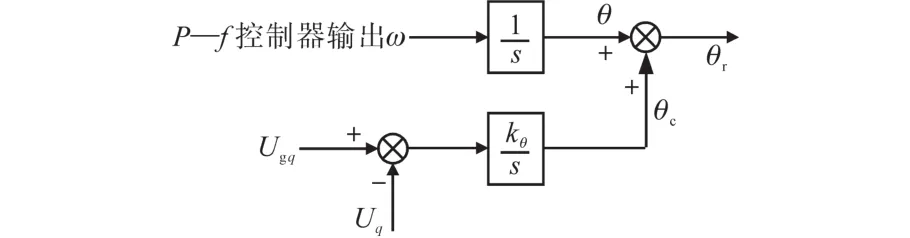
圖16 相位同步控制框圖Fig.16 Phase synchronization control block diagram
文獻[44-47]為解決并網時暫態(tài)沖擊問題,提出PQ控制器初始狀態(tài)跟隨Vf控制器輸出狀態(tài)的控制策略,預同步控制策略如圖17所示。圖17中,Set為并網指令信號;vinv為離網工況輸出電壓;θinv為PCS輸出電壓相位;θref為PCS參考相位;vd_grid為電網側電壓有功分量;vd_inv為PCS輸出電壓有功分量。當Set并網指令下達后,計算網側、PCS輸出相位差,經PI控制器得到參考相位,同時利用網側、PCS有功分量得到電流內環(huán)參考值,當參考值符合要求,實現無電壓電流沖擊的離網至并網模式切換。
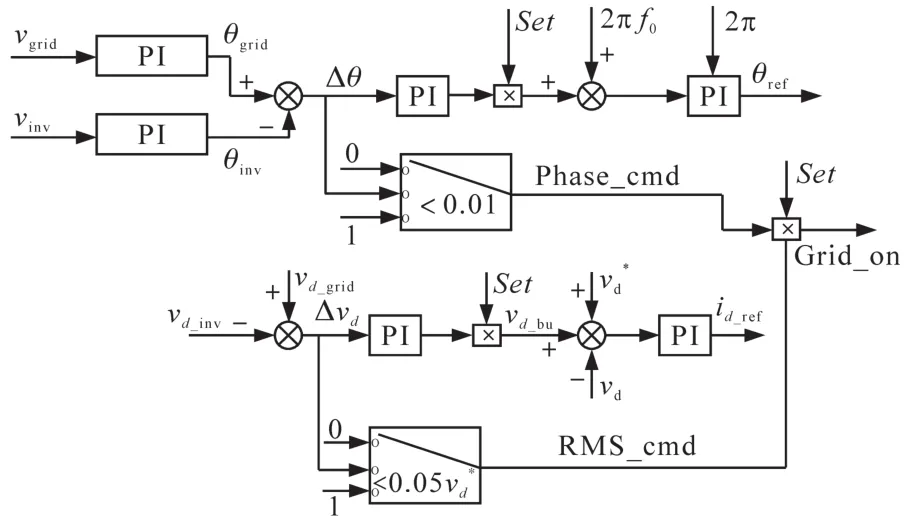
圖17 預同步控制框圖Fig.17 Preliminary synchronization control block diagram
VSG控制策略在離網下會調整PCS輸出電壓的頻率和相位,故會產生與電網電壓的相位差,為降低模式切換過程中的電流沖擊,VSG并網也需有預同步環(huán)節(jié)。文獻[48-49]為消除并網時產生的沖擊電流,設計針對VSG離網轉并網控制策略,其控制原理為
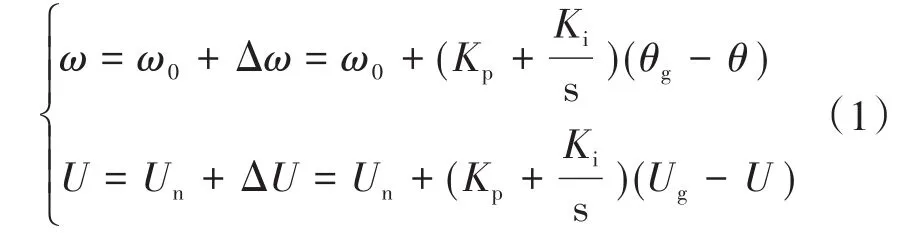
式中:ω為系統(tǒng)角頻率;Δω為增加到ω0上的相位補償量;θg,θ為鎖相環(huán)鎖出相角、VSG控制輸出相角;Un為VSG空載電勢;ΔU為增加到Un上的幅值補償量;Ug,U為電網電壓、系統(tǒng)端電壓;Kp,Ki為PI控制器的比例和積分系數。
該控制策略方法簡單、易于實現,能夠在并/離網切換時提供電壓、頻率支撐,實現在離網轉至并網時很好地跟蹤電網電壓,且無明顯沖擊電流,提高了系統(tǒng)穩(wěn)定性。
5 PCS整體聯系及微電網線路阻抗特點
5.1 DC/DC側和DC/AC側控制關系
相較于單級式PCS,雙極式PCS增加了DC/DC變換器部分,用以提供DC/AC側電壓支撐,拓寬直流母線端電壓等級范圍。但由于DC/DC變換器存在,裝置散熱問題嚴重,控制復雜度有所提升,整體裝置效率下降,同時增加裝置成本。
雙極式PCS可通過全解耦實現DC/DC側與DC/AC側獨立控制,降低控制難度[50]。單級式PCS需承擔直流母線電壓支撐與交流側輸出功率等任務,但雙極式PCS可實現功能獨立,即DC/DC側對儲能電池進行控制,實現儲能電池的恒流、恒壓充放電及恒流、恒壓、恒功率放電;DC/AC側整流模式時實現DC/DC側直流母線電壓支撐,逆變模式時實現儲能系統(tǒng)恒壓、恒流、恒功率放電。值得注意的是,當DC/DC側控制儲能單元進行恒流、恒功率放電時,其間的直流母線電壓需由DC/AC側支撐,此時DC/AC側的控制與單級式PCS控制類似。表4為單級式、雙極式PCS優(yōu)缺點比較。
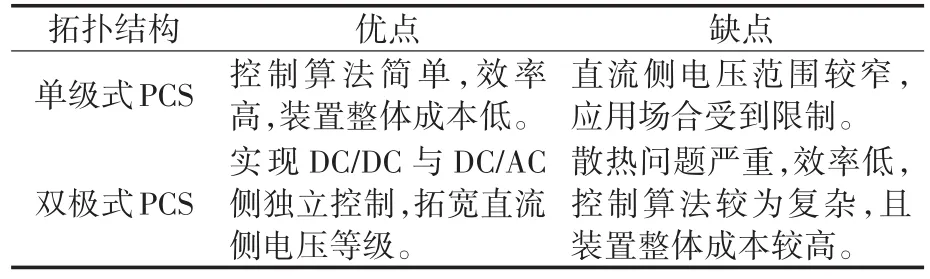
表4 單級式、雙極式PCS比較Tab.4 Comparison of single-stage and bipolar system PCS
相較于單級式PCS,雙極式PCS最大的優(yōu)點是拓寬了直流側電壓等級,其機理為:當儲能電池輸出電壓低于DC/AC側不控整流值時,導致交流側輸出電壓低于電網電壓,需在交流輸出側添加隔離變壓器后方可實現PCS并網運行。DC/DC變換器的存在可將較低的儲能單元電壓提高至不控整流值甚至更高,易于PCS直接并網運行。因此,雙極式PCS適用于超級電容等端電壓變化范圍較廣的儲能介質。
5.2 并/離網工況下控制策略關系
微電網內PCS有并網、離網兩種工作模式。靈活地選擇工作模式及控制策略是微電網相較于傳統(tǒng)電網優(yōu)勢所在,針對不同的微網控制模式,PCS并/離網控制策略組合也略有不同。
5.2.1 基于主從控制的并/離網控制策略關系
主從控制下微電網有集中主控和分散主控兩種方式[51]。
1)集中主控。集中主控是并網模式時,微電網的電壓頻率由電網支撐,故微網內的PCS可采用PQ控制;離網模式時,缺少電網電壓、頻率支撐,選擇一臺容量夠大的PCS采用Vf控制支撐電壓、頻率,其余PCS采用PQ控制。該控制下,主控PCS需有并/離網切換功能,并且能精準地進行計劃和非計劃并/離網切換,否則將導致微電網內電壓失控,影響微電網電能質量和供電可靠性。基于集中主控的并/離網控制策略結構如圖18所示。
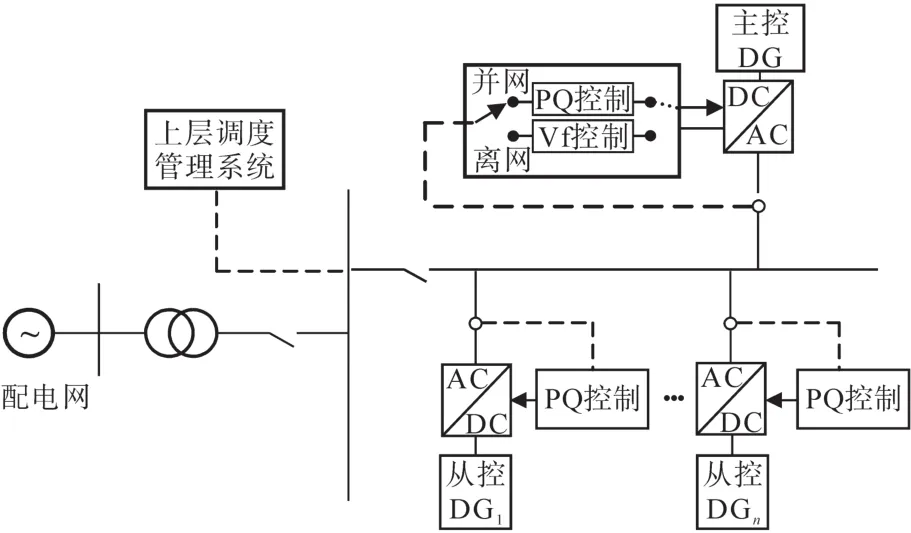
圖18 基于集中主控的并/離網控制策略結構Fig.18 Grid-connected and off-grid control strategy structure based on centralized master control
2)分散主控。分散主控是并網時,PCS均采用PQ控制;離網時,將多個容量夠大的PCS切換為下垂控制為微電網提供電壓、頻率支撐,其余PCS依然采用PQ控制輸出功率。該控制下容量夠大的PCS均需具備控制策略無縫切換能力。基于分散主控的并/離網控制策略結構如圖19所示。
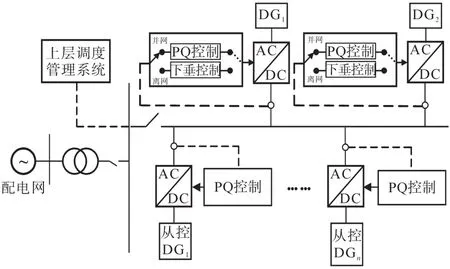
圖19 基于分散主控的并/離網控制策略結構Fig.19 Grid-connected and off-grid control strategy structure based on decentralized master control
5.2.2 基于對等控制的并/離網控制策略關系
對等控制[51]是無論PCS工作于哪種工況,均采用下垂或VSG控制,此控制下無需進行控制模式的轉換,可以實現母線電壓控制的連續(xù)性。需要注意的是在離網轉并網時,需進行電網電壓幅值、相位的預同步控制。基于對等控制的并/離網控制策略結構如圖20所示。
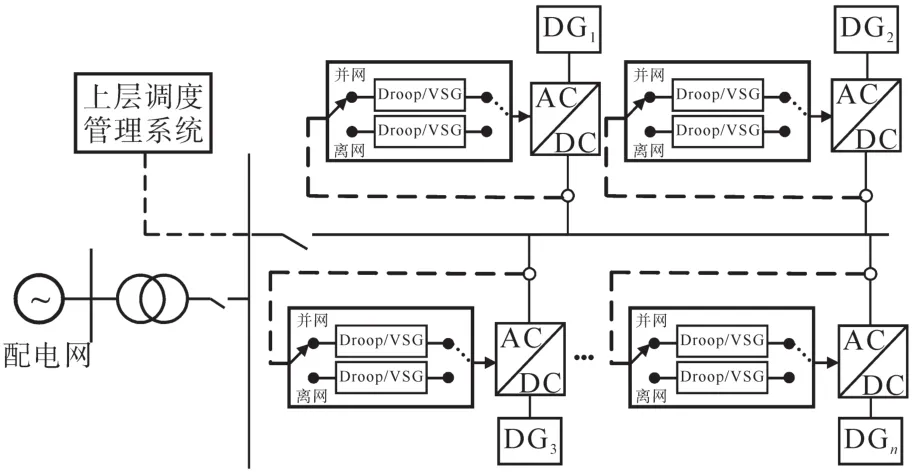
圖20 基于對等控制的并/離網控制策略結構Fig.20 Grid-connected and off-grid control strategy structures based on peer control
5.3 低壓微電網線路阻抗特點
低壓微電網線路阻抗呈阻性,若忽略線路阻抗特性,則不能對微電網系統(tǒng)輸出的有功、無功功率進行準確控制。多臺PCS并聯使用時,儲能系統(tǒng)到負載端距離差異性導致彼此間線路阻抗不同,使得有功功率無法均分,容易致使某些儲能系統(tǒng)出現過載現象,影響微電網穩(wěn)定運行。
文獻[52]為解決PCS輸出阻抗與線路阻抗匹配問題,引入阻性虛擬阻抗,在下垂控制基礎上加入PI調節(jié)器,對其電壓和頻率基準進行微調,實現PCS對有功功率的無靜差跟蹤。文獻[53]針對線路阻抗不匹配導致并聯PCS環(huán)流問題,提出虛擬阻抗功率解耦控制策略,該控制策略通過阻抗環(huán)對PCS等效輸出阻感進行調節(jié),解決PCS輸出功率不能均分問題。文獻[54]為提高離網時無功功率均分精度,提出自適應虛擬阻抗控制策略,該控制依靠通訊實現無功功率參考值的獲取,在離網工況下,能解決饋線間電壓不匹配問題,實現無功功率均分。
但以上控制策略均有一定缺陷,即或工作在理想電網、或增加功率耦合或過度依賴上層通訊。目前,學者針對以上控制策略的不足,對其進行優(yōu)化,解決功率耦合和過度依賴通訊等問題[55-56]。
6 結論
微電網是國網建設的重要組成部分,是實現經濟綠色可靠供電的有效途徑,其內部的儲能系統(tǒng)可平抑新能源發(fā)電功率波動,促進新能源就地消納,保證微電網內部電能質量和供電可靠性。但微電網應用中,PCS作為儲能介質與電網和負荷間的接口設備仍存在較多問題,主要體現多設備并聯的非線性特性、下垂控制的固有矛盾等。因此,應用于微電網的PCS運行控制有待深入展開的工作有:1)研究解決低壓微電網PCS多機并聯應用場合下,線路阻性成分占比較高造成的有功、無功功率耦合嚴重問題;2)研究解決多臺PCS并聯帶來的環(huán)流抑制、諧振抑制、諧波功率均分等問題;3)研究解決下垂控制的固有矛盾:功率均分與電壓控制精度的選擇控制問題。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26