基于K-means的貨車駕駛行為分析
2021-11-10 07:07:20吳梓欽
科技視界 2021年30期
吳梓欽
(廣東石油化工學院,廣東 茂名525000)
0 引言
本文主要是對貨運車輛駕駛行為進行聚類研究分析,數據來源于車聯網記錄的營運車輛行駛狀態基礎數據,包含從2018年7月1日至2018年10月31日的100輛貨運車輛駕駛行為數據和自然氣象因素數據。考慮到對車輛駕駛行為進行建模研究是研究貨運車輛駕駛行為聚類研究的有效方法[1],其中安全駕駛是駕駛過程中很受關注且關鍵的部分,不良駕駛行為研究車輛駕駛行為的重要組成部分,因此需要構建不良駕駛行為評價指標對貨運車輛的行車安全進行分析,現擬構建以下8個[2]不良駕駛行為安全評價指標:疲勞駕駛、急加速、急減速、怠速預熱、超長怠速、熄火滑行、超速和急變道[3]。
1 貨車不良駕駛行為評價指標
1.1 疲勞駕駛
疲勞駕駛是指駕駛員在長時間連續行車后,產生生理機能和心理機能的失調,而在客觀上出現駕駛技能下降的現象。駕駛人睡眠質量差或不足,長時間駕駛車輛,容易出現疲勞,影響到駕駛員的知行意合等諸多方面。
1.2 急加速
急加速就是在駕駛過程中,短時間內或瞬時間油門加油,噴油量瞬間增加,加速踏板加大力度發動機轉速升高,使車的速度迅速提高。急加速行為會導致燃油混合氣變得濃稠,油耗燃燒不夠充分,從而耗費更多油,不僅浪費燃油資源,還會加重生態環境中的尾氣污染。在實際的運輸過程中,通過相鄰兩次數據的GPS速度差可以反映車輛的速度變化情況,當速度變化量大于0時即為加速,判定貨運車輛是否產生急加速行為,需要通過參數設定一個急加速的判定閾值。急加速會增加輪胎與地面的摩擦力,輪胎容易磨損,可能對前方的運輸車輛或物體造成影響,增加追尾風險,容易引發交通事故。結合學者的相關研究發現,可以設定為當車輛的前后速度變化閾值為4 km/h時劃分為急加速行為。
1.3 急減速
急減速就是在駕駛過程中,短時間內或瞬時間減小油門,噴油量瞬間減小,急剎車,急踩離合,發動機轉速瞬間減小,使車的速度迅速降低。對發動機和剎車有影響,在實際的運輸過程中,通過相鄰兩次數據的GPS速度差可以反映車輛的速度變化情況,當速度變化量大于0時即為減速,判定貨運車輛是否產生急減速行為,需要通過參數設定一個急減速的判定閾值。
1.4 怠速預熱
怠速是指發動機在空檔情況下運轉,指速度和加速度均為0時,機動車仍在燃油維持發動機轉動的一種工作狀態,如發動機在運轉時完全放松油門踏板。
短暫的怠速預熱對車輛啟動有良好的作用,而長時間怠速會影響油耗,影響交通安全和車輛自身的機械安全。車輛剛啟動時,發動機類溫度還沒有達到正常工作時的溫度,如果這時就行駛,會導致發動機類燃油燃燒不充分,耗油更多,還會積累許多未充分燃盡的雜質,損壞車輛。所以車輛剛啟動時,約控制在1分鐘時間內進行預熱,對車輛也會有良好的保養效果。
1.5 超長怠速
長時間怠速由怠速的時間長短來定義,通常認為2分鐘以內怠速為正常情況,可能是在等紅燈,在2到10分鐘之間為長時間怠速,超過10分鐘為超長怠速。再考慮到正常怠速預熱時間應控制在1分鐘內,超過1分鐘可能會損壞車輛,綜合考慮怠速狀態與怠速時間來評判駕駛行為的安全性與節能性,并結合學者的經驗研究,所以定義當一次怠速時長超過60 s時即為一次長時間怠速,當發動機轉速不為0但是車輛本身速度為0時,表明該車輛超長怠速。
1.6 熄火滑行
熄火滑行是指機動車在行駛過程中,駕駛員將變速桿置于空檔位置,使發動機與驅動輪的離合器分離開,車輛的發動機引擎處于熄火狀態,而車輛會按照慣性繼續向前滑行的狀態。ACC狀態為車輛引擎點火和熄火狀態的標志,當ACC狀態為1表示車輛引擎處于點火狀態,當ACC狀態為0表示車輛引擎處于熄火的狀態。
1.7 超速行駛
超速行駛是指駕駛員以超過法律、法規規定的行駛速度駕駛,是一種違反交通規則的異常駕駛行為,也是衡量車輛安全行駛的一項十分重要的指標。超速行駛容易在調速和保護系統故障及本身的缺陷中造成嚴重交通事故,直接威脅著駕駛員和他人的生命財產安全。對于超速行駛,主要根據車輛當前經緯度坐標,判斷出車輛當前行駛道路,并根據當前道路限速要求,來判斷車輛當前速度是否超速。
1.8 急變道
急變道,是駕駛員在正常行駛過程中,由于某種原因,突然切換行車車道,變道后仍然沿原先道路方向行駛的一種行為。急變道與急變速相似,是行駛過程中的一種應激反應,往往發生于超車、避讓、堵車時切換車道等情形,是一種不安全的駕駛行為。
2 K-m e an s的貨車駕駛行為分析
如單獨分析AA00003車輛的行車狀態數據時,觀察行車狀態數據集中的時間項記錄有日期(年月日)和時間(時分),精確到分鐘,而同一分鐘有多條行車狀態數據,那么數據是隨著時間逐秒增加而記錄,但時間項沒有顯示秒,考慮到在后續計算和分析的過程中如果再詳細劃分秒會耗費較大的工作量,故考慮按分鐘對數據進行聚合,對車速等數據,聚合時采用平均值。里程數據是個累計值,應該取每分鐘內的最后一個數值,為了計算簡單,也都用平均值。運用Excel進行數據匯總,得到相同分鐘時間下的速度、行車里程等的平均值,如圖1所示。圖中新增加了一項加速度a,單位是m/s2。
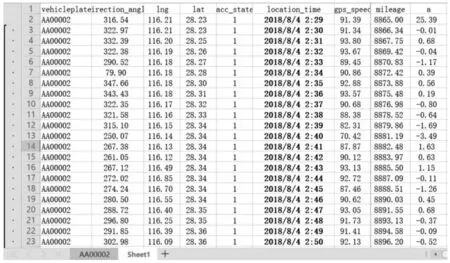
圖1 AA00003數據按秒匯總聚合表
駕駛行為聚類分析。分析貨運車輛的駕駛行為的常用方法有K-means聚類、高斯混合聚類、譜聚類方法等數學建模的方法,而常用的是K-means聚類,且具有較好的聚類效果,因此考慮運用K-means聚類對駕駛行為進行分類,建立行車安全的數學模型來對貨運車輛的駕駛行為進行評分。
K均值聚類算法是一種迭代求解的基于原型的目標函數聚類分析算法,它是數據點到原型的某種距離作為優化的目標函數,利用函數求極值的方法得到迭代運算的調整規則。K-means算法采用歐式距離作為相似度測量,以誤差平方和準則函數作為聚類準則函數[4]。
K-means聚類算法的優點:(1)原理比較簡單,收斂速度快,容易實現,是經典聚類算法。(2)對于密集接近高斯分布的簇,聚類效果較好。(3)主要需要調參的參數僅是簇數k。(4)對于大數據集,依然能夠高效運行聚類。
K-means聚類算法的缺點:(1)k值需要預先給定,很多情況下k值難以估計。
(2)需要先選取一個初始聚類中心(質心點)來確定初始聚類劃分,再對初始劃分進行優化。因此Kmeans算法對初始選取的質心點敏感,不同的隨機種子點得到的聚類結果完全不同,影響聚類結果。(3)對噪聲和異常點敏感,常用來檢測異常值。(4)采用迭代方法,可能只能得到局部最優解,無法得到全局最優解。
通過將提取的每秒記錄的數據,運用SPSS對數據進行標準化處理,去除量綱的影響,再對數據進行K-means,發現分成3類比較合適,分別得到速度和加速度聚類分析圖,如圖2和圖3所示。
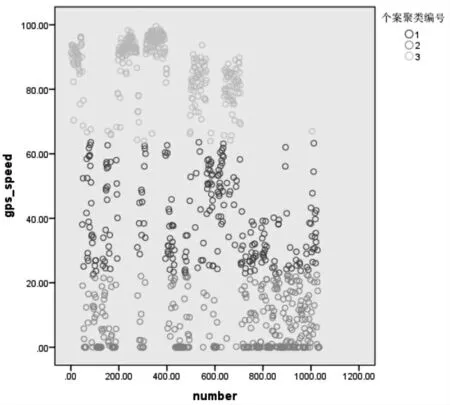
圖2 速度K-means聚類分析圖
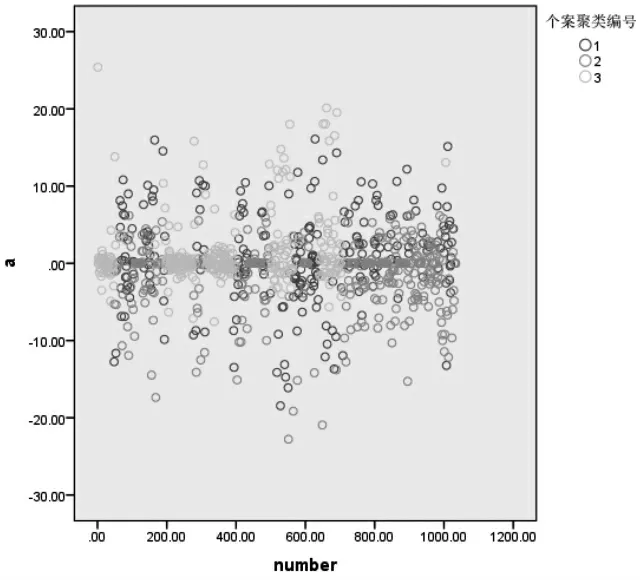
圖3 加速度K-means聚類分析圖
從平均速度的關系圖中可以看出駕駛行為能夠較好地分成三個類別:(1)藍色可以代表穩健型駕駛,表示車輛在運輸過程中的平均速度處于20~60 km/h的中等速度范圍,速度比較集中。(2)灰色可以代表激進型駕駛,表示車輛的平均速度較大,在60~80 km/h的范圍,在行駛過程中車輛駕駛員傾向于行駛速度過快,頻繁急加速急減速。(3)綠色可以代表疲勞型駕駛,表示車輛在駕駛時速度比較小,也可能是疲勞時速度較小。
從加速度的關系圖中可以看出駕駛行為能夠與速度比較接近地分成三類:(1)灰色可以代表穩健型駕駛,表示車輛的加速度變化比較集中分布在0附件,表示駕駛比較穩定。(2)藍色可以代表激進型駕駛,表示車輛的加速度變化較大,在行駛過程中車輛駕駛員傾向于急變速,頻繁急加速急減速。(3)綠色可以代表疲勞型駕駛表示車輛在駕駛時加速度比較分散,時而穩定,時而急變速。
3 結語
本文首先構建分析了8種影響安全駕駛的不良駕駛指標(如疲勞駕駛、急加速、急減速、怠速預熱、超長怠速、熄火滑行、超速、急變道),再運用K-means聚類模型對駕駛行為進行聚類,主要可以分為穩健型駕駛、激進型駕駛、和疲勞型駕駛3種。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車電器(2018年1期)2018-06-05 01:22:54
公民與法治(2016年4期)2016-05-17 04:09:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17