填筑工程無人化測量關鍵技術
2021-11-04 01:48:40潘賢亮劉宏
中國港灣建設 2021年10期
潘賢亮,劉宏
(上海達華測繪科技有限公司,上海 200136)
0 引言
填筑工程施工區域通常近岸瀕海,屬于淺灘或灘涂區域,環境復雜。在潮間帶區域,水草叢生,漁網遍布;拋石作業區域亂石較多,水下陡深陡淺,非常不利于地形的測繪。常規通過人工RTK 測量或者有人船舶進行水深測量來獲取填筑區域的平面和高程信息。傳統測船吃水深,易撞灘、擱淺,且人工操作船舶走線偏差大;人工跑灘,灘面質軟、淤陷,人員和設備安全風險高,作業效率低。
如何快速、安全、準確地進行相應的測量工作,為施工提供準確及時的服務,是亟需解決的問題。無人機、無人艇測量技術相結合形成的無人化測量技術,具有自動化、智能化、高精度、高效率的特點,為填筑工程測量提供了新思路[1-2]。
1 無人機航攝結合激光雷達測量技術
1.1 無人機激光雷達系統測高技術
無人機機載雷達測量系統搭載激光雷達,點云密度高,可獲取地表高精度三維信息,快速提取淺灘、灘涂等地物信息,作業效率高,尤其在蘆葦、樹林等植被覆蓋的區域,激光脈沖獨特的多次回波技術,可以迅速獲取到地表真實數據。多旋翼無人機搭載激光雷達實施測量,可發揮無人機的機動快速和激光穿透植被的優勢,提高了作業效率,解決植被覆蓋灘涂測量難題[3]。
在進行測量作業時,需充分了解無人機和激光雷達系統的設備結構、使用方式及各項功能,使兩者能夠穩定、完整的結合起來;合理規劃航線,保證相鄰條帶重合度滿足規范要求,保證數據處理質量。在數據處理時,需要根據測量區域的具體情況針對性處理,對于植被覆蓋區,無人機激光雷達系統發射的激光波可以穿透植被空隙到達地面,獲取地面點數據;但是對于有水區域,激光雷達系統發射的激光波無法穿透水體,從點云數據成果判斷十分困難,要結合現場照片進行判斷;對于潮間帶地區,潮水剛退出露灘及吹填區吹填的新鮮泥表時,由于表層覆蓋了一層水膜,會導致激光雷達系統后向散射率變低,從而造成掃描航帶寬度變窄,若要保證數據獲取的精度與準確性,需要根據現場情況縮短航帶間隔以保證數據質量。
通過對不同區域的成果與已有的人工RTK 測點比對,高程中誤差最小的為近岸構筑物,高程中誤差最大的為植被覆蓋區,不同測量區域高程中誤差均在12 cm 以內,優于GB/T 17278—2009《數字地形圖產品基本要求》1∶500 地形圖要求,體現了該系統的高精度和可靠性。
1.2 點云數據算法提升與改進技術
點云處理方法一般是基于離散點云數據進行每個點或點云區域的單獨處理與輸出。處理時間長,精度較低,且受地表噪點的影響較大。在實際使用過程中,總結出了人工干預結合自動濾波方法[4],此方法在進行自動濾波之前先對點云進行人工處理,比如剔除地面凹點跳點,點云平滑等操作,既有自動濾波的公式化、避免人工分類中的失誤與界線分隔不明情況出現的優點,又能有效避免自動濾波時機械化取最低點而導致測出整個地面高程偏低的情況。使用此種方法可以很大程度上減少數據后處理的時間,以及對處理人員數據處理經驗的需求。
在系統參數校準時,選擇校準區域,首先人工尋找相同的特征點,進行安裝偏差角度的計算,將Roll、Pitch 和Yaw 三者的校準值計算出來,將該值設置進自動校準窗口,再啟用自動校準項,對人工校準值進行精細校準,并將校準值上載至點云數據,查看同一航線、相同區域的2 條相同航帶的點云疊合情況,直至兩者重合,此時最佳校準參數會自動上載至校準數據。
通過一系列的測試和作業,根據數據自身特點和成果要求,總結出一套從數據預處理到成果輸出的較為成熟的工作流程。以該流程為框架,結合主流激光雷達數據軟件處理的工作方式,采用C#編程語言開發基于激光點云數據自動生成數字地面模型的算法及專業的識別、過濾軟件系統。該軟件在點云數據導入后,通過設置相關的自動化識別、過濾參數,實現海量數據的自動化識別、過濾,生成數字地面模型最終成果,有效降低了繁重的數據處理工作強度,減少了人為處理原因產生的處理誤差,提高了數據處理速度和質量。
1.3 激光點云和低空攝影測量成果融合
激光點云和低空攝影測量成果融合分為將激光點云數據用于低空攝影測量的相控和點云與航空攝影測量影像融合兩方面[5-9]。
1)激光點云數據用于航空攝影測量的相控
激光雷達數據在對現場高程數據的獲取上因為其為主動式測量,從激光掃描頭中發射激光脈沖對現場地表進行測量,可以獲取較為完整的地面點坐標數據。但是受制于掃描式測量的方式,對于地表的色彩紋理獲取較少,且雖然點云數據的掃描密度很大,但是在大范圍測量過程中,仍會不可避免出現較多掃描間隙。而攝影測量所獲取的正射圖像則對現場的紋理色彩以及地物特征把握較好,但是由于其測量原理原因,在如潮間帶等難以布設大范圍像控點的情況下,其高程信息精度會受到一定影響。因此將激光點云數據用于攝影測量的相控,解決了灘涂等困難地形區域人工無法布設相控點的難題,可以提高攝影測量高程精度。
2)點云與航空攝影測量影像融合
通過開發相應的地理信息軟件,實現激光點云數據與光學影像以及施工圖的匹配、融合,將點云數據生成DEM 底圖,隨后將DEM 作為正射影像的高程信息基礎進行顯示與建模,可以很大程度上提高三維地形測量精度與表達效果。
對于復雜地形區域,使用多旋翼無人機低空進行精確高程數據獲取(DEM),再使用小型低空無人機進行航拍作業,獲取真彩色紋理數據以及高程數據,隨后進行疊加分析與處理。采用點云數據和航攝數據進行色彩匹配的計算方法,可以將RGB 屬性賦予對應坐標點的點云數據,并可以使用RGB 顯示模式對點云數據進行真彩色顯示。進行激光點云與航攝正射影像融合,可以獲取現場真彩色點云,賦予了RGB 屬性的激光點云數據不僅保留原有的激光點云的反射強度、反射角度以及坐標信息等屬性,又附加了真彩色屬性。這樣對于激光點云的特征紋理分析以及檢查點選取的意義非常大,且可以將正射影像航攝照片進行匹配檢校,以減少接縫處的變形情況。另外,在兩者疊合的基礎上進行設計圖的疊加,可以直觀地判斷項目施工的進度和質量,對于指導施工具有重要意義,如圖1 所示。
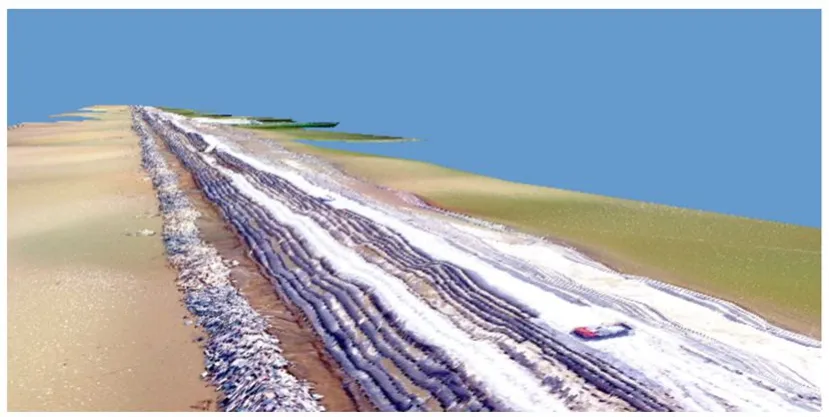
圖1 點云數據疊加影像圖Fig.1 Overlay image of point cloud data
無人機結合激光雷達測高技術和低空航攝結合,實現了在植被覆蓋區、灘涂區、吹填區等人員測量困難區域的地表高程數據獲取。
2 適應圍區測量的無人船集成關鍵技術
無人船技術應用于環境治理、海事調查、安全防衛、軍事等方面的案例較為豐富,但運用于吹填施工檢測方面的案例較少,針對圍填工程應用設計也不太成熟。通過調研選擇一款較為合適的無人船母船,在此基礎上通過集成定位和測深設備,測試、優化,逐步形成一款適用于圍填工程的無人測量船[10-15]。
2.1 無人船集成改進
為適應圍區測量需求,設計的無人船船體要吃水淺,適合淺灘作業;體積小,可方便穿梭在圍區泥塘等困難水域;推進器轉向靈活,動力強勁;船底對于測深換能器有保護措施。
將采集終端、定位、測深傳感器在船端集成,通過有線方式傳輸,無線網橋用來控制采集和顯示過程效果。并搭載攝像頭、避碰雷達等傳感器,兼容測深數據采集系統,記錄船體定位信息,船體的姿態信息及水深數據,通過控制軟件進行實時顯示和操作,集成的無人船測量系統見圖2。

圖2 無人船測量系統Fig.2 Unmanned ship survey system
2.2 無人船測量試驗
無人船技術應用于吹填區、水系內河監測,可填補傳統船測量盲區的水深數據空白,直線航行的優勢彌補了船測走線彎曲的缺陷,降低了水深數據的冗余量,提高了數據的利用率;也適合進行固定斷面監測,多期測量斷面一致性較好。而傳統有人船測量不同期對同一斷面測量航線偏差較大,不利于分析。上海橫沙圈圍項目多期無人船圍堤斷面監測數據顯示,壩體上半部分較穩定,結構特征一致;綜合多期數據對比,便于分析壩基底部外側受潮水侵蝕導致的沖淤情況,為筑堤護底護基提供了及時、有效的數據參考。
為驗證無人船測量的精度和性能,使用同一組測線對相同區域進行測線布設,測線間隔10 m,按1 m 距離采樣。無人測量船與有人測量船測量同一時間段同步進行,潮位控制均采用RTK 驗潮模式。使用hypack 軟件統計2 種測量方式的交叉點比對信息,分析其綜合測量精度,2 種測量方式深度互差統計結果見表1。

表1 深度互差統計表Table 1 Depth cross-difference statistics
統計表明,互差5 cm 以內占比80.5%,互差10 cm 以內占98.6%,互差均小于20 cm。通過2種水深采集方式的成果統計比較可知,無人船整體水深測量精度較高。
通過實際測試成果表明,自主集成的無人船體積小、重量輕、荷載大、吃水淺,適用于圍填工程的淺灘區域的水深數據采集,采集結果較穩定;采集的數據通過2.4 GHz 無線網橋實時傳回岸端,保證了數據的實時完整回傳,可滿足大部分生產的需求。
3 無人船、無人機成果數據融合處理
填筑區內包含大面積水域、淺灘、植被覆蓋區以及新成陸區域,水陸交接區域受潮水影響,常規測量手段往往造成成果數據的真空地帶;采用無人船高潮時水面作業和無人機低潮時空中作業相結合,實現水陸數據成果的無縫銜接。
水陸融合技術現階段分為3 個步驟進行實現:第1 步為工程數據的統一化記錄,即統一無人機、無人船等一系列數據格式。因為該類基礎數據都是獲取以表達點的位置等信息,本質上各類空間坐標文件都可以通過轉換變化為行業內的標準數據格式,如X,Y,Z 等基礎數據格式。在此基礎之上,進行統一數據記錄標準,統一字段格式,統一數據后綴等工作。第2 步是數據處理模塊的集成化,可以將無人船數據、無人機數據以及其他類型數據進行導入,并可以進行同屏顯示與處理。第3 步為多種數據統一化后的疊合顯示、分析以及輸出,而數據輸出的結果,可以是統一化的數據格式成果,也可以是各系統中常用的數據格式。水陸數據融合效果見圖3。

圖3 水陸數據融合Fig.3 Land and water data fusion
4 結語
填筑工程無人化測量關鍵技術,創新性地將無人機測高技術和無人船測深技術進行融合,解決了大面積吹填區域水陸三維地形數據獲取的難題;改進了激光雷達數據處理流程與工藝,利用校準參數智能化選取,人工干預法自動濾波,航拍影像疊合校準分析等全新測量手段,減輕了內外業工作人員的作業強度;將點云用于航攝相控,實現了激光點云數據與光學影像以及施工圖的匹配、融合,提高了三維地形表達效果,拓展了應用空間;通過針對性的集成無人船、測深和定位系統實現對大船和人工無法到達的圍區淺灘的準確測量,與無人機結合提高圍區檢測效率和降低人員安全風險。該技術大大提高了沿海灘涂開發的速度和效益,降低人力、物力的投入,具有較高的經濟及社會效益。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52
