基于內部能量管理和外部路徑規劃協同的水下無人航行器能耗優化
2021-11-02 12:28:18陳洋洋謝長君吳細秀范則陽
電工電能新技術 2021年10期
侯 慧, 陳洋洋, 謝長君, 吳細秀, 謝 坤, 范則陽
(1.武漢理工大學自動化學院, 湖北 武漢 430070; 2.中國艦船研究設計中心, 湖北 武漢 430064)
1 引言
隨著世界各國對海洋資源開發與利用的日益重視,水下無人航行器(Unmanned Underwater Vehicle, UUV)因具有自主航行能力,可以代替人類執行眾多危險任務,已經成為海洋領域研究的一大熱點[1,2]。但UUV自身體積有限,能夠攜帶的能源儲量也有限,因此如何以最小的能耗代價來完成較長航程任務是一個亟待解決的研究課題[3]。
在不改變UUV本身結構的前提下,可以通過制定能量管理策略[4]和規劃UUV的航行路徑[5]減少能源消耗。能量管理策略大致可分為基于規則控制和基于優化控制等[6]。基于規則控制的能量管理策略由于實用性強、可靠性高等優勢在實際生產中應用較為廣泛[7]。其中,基于確定規則,文獻[8]對功率跟隨能量管理策略中的參數和荷電狀態(State Of Charge, SOC)調節方式進行了充分分析,設計了Z曲線法和PI調節法,使能量源的SOC上限和充電功率參數保持在適度范圍內,以減小能量源的燃料消耗量和波動率。相對于確定規則控制,模糊規則控制是將輸入量進行模糊化處理,經過模糊規則推理計算出輸出量,不需要建立被控對象的確切數學模型[9]。文獻[10]使用IF-THEN規則列表將不同能量源相關聯,并基于系統不同驅動模式為它們分配一定的邏輯關系,實現不同能量源之間的功率分配,從而提高系統的整體燃料經濟性。但基于規則控制的能量管理策略由于其預先設定了規則,在實際應用過程中無法進行調整,因此導致在復雜的工況下控制效果表現欠佳,而基于優化控制的能量管理策略則可以在復雜工況下尋求系統的最優解[11]。
基于優化控制的能量管理策略主要分為全局最優和瞬時最優等[12]。為獲得全局最優,文獻[13]將動態規劃算法和模糊控制策略進行結合,動態規劃算法應用于各能量源之間的最優功率分配,并將其結果用于模糊控制策略的設計,以獲得整個循環工況的最小燃料消耗。而文獻[14]基于龐特里亞金瞬時最小值原理,通過在管理層加入在線識別層,利用自適應遞推最小二乘法在線辨識模型跟蹤能量源性能的變化,使其時刻運行在最佳性能從而減小系統的燃料消耗。雖然全局最優能量管理策略需要預知系統的循環工況,計算量大,存在“維數災難”的可能性,但其可以保證經濟性的全局最優[15]。
也有一些學者另辟蹊徑,通過規劃UUV的航行路徑減少其能源消耗。文獻[16]以節能為目標,采用基于遺傳算法的動態規劃完成路徑規劃,驗證了可以通過規劃航行路徑減少UUV的能耗,但其并沒有考慮到海洋環境,在路徑規劃中忽視環境影響,可能會使UUV航行在強流中導致能源浪費,而且會增加撞擊障礙物的潛在危險性。文獻[17]利用多重粘性蘭姆渦和二維Navier-Stokes方程模擬了海洋水環境,并通過結構差分進化算法獲得了更高的航行速度,從而顯著地節省了能源消耗。文獻[18]提出了一種以環形邊界作為安全距離約束的A*方法,解決了UUV在海洋水環境中的運動規劃問題,同時探討了在部分環境中,不同強度的逆流和順流分別順時針和逆時針方向移動對最優航行路徑的影響。
綜上所述,現有對于UUV能耗優化的研究要么集中于制定能量管理策略,要么集中于規劃UUV的航行路徑,但使用能量管理策略會得出一個最優速度、一個最優動力供給方案,使用路徑規劃又會得出另一個最優速度、另一個最優動力供給方案,然而UUV只能以一個速度、一個動力供給方案航行,必然需要將兩者統一。目前,將兩者結合的研究較少,同時也缺乏考慮利用海流的流場減少UUV的出力從而減少其能源消耗。本文將內部能量管理策略和外部路徑規劃結合在一起,通過優化UUV的航速和分配2套燃料電堆和蓄電池的輸出功率,同時選擇搭乘海流的切入點和切出點,使得UUV在起始點之間航行需要的等效氫耗最小。
2 UUV混合動力系統拓撲結構
UUV混合動力系統拓撲結構如圖1所示,主要包括2套燃料電堆、1套蓄電池、主網、推進電機以及輔機設備等。燃料電堆與蓄電池通過與主網相連接為推進電機和各種輔機設備供電。
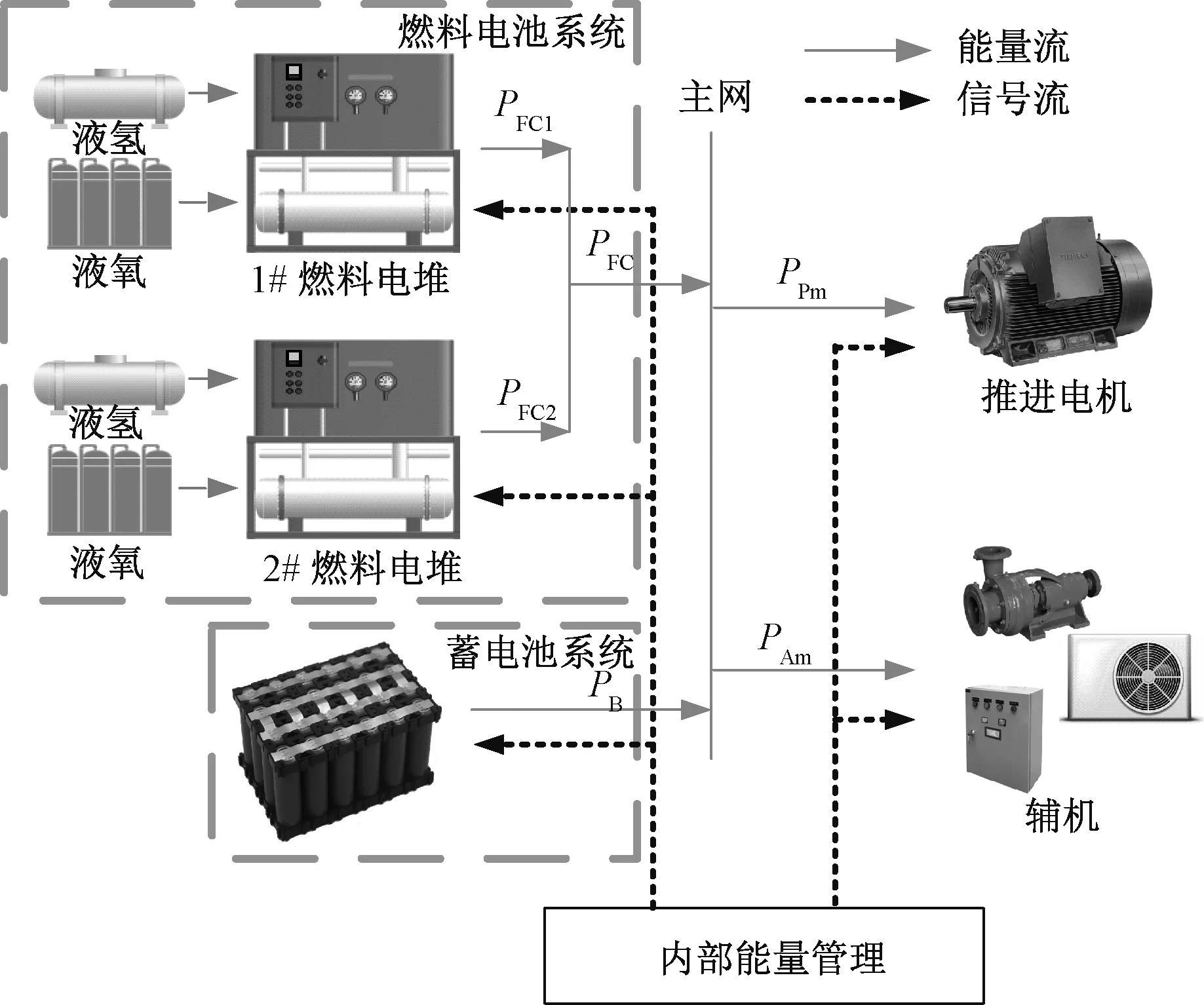
圖1 UUV混合動力系統拓撲結構圖Fig.1 Topology of UUV hybrid power system
UUV通過合理調節燃料電堆之間的輸出功率、燃料電池系統和蓄電池系統之間的輸出功率實現UUV混合動力系統的能量管理,并通過調節推進電機的功率調節UUV的航速。PFC、PB、PPm、PAm之間的關系滿足:
PFC+PB=PPm+PAm
(1)
式中,PFC為燃料電池系統的輸出功率;PB為蓄電池系統的輸出功率;PPm為推進電機的需求功率;PAm為UUV各種輔機設備所需總功率。
3 基于內部能量管理和外部路徑規劃協同的UUV能耗優化架構
內部能量管理為UUV輸出不同航速下的需求功率,UUV在不同外部水流環境下有不同的需求功率,故內部能量管理和外部路徑規劃之間必然存在相互影響,本文將UUV的內外層優化置于統一的框架內,以航速為耦合變量,建立基于內部能量管理和外部路徑規劃的能耗優化模型,以UUV在起始點之間航行需要的等效氫耗最小為目標,求解UUV的最佳航行路徑、航速和功率分配供給方案。其中,內部能量管理層根據等效氫耗理論,在水下無人航行器不同需求功率下,使用模擬退火混合遺傳算法為2套燃料電堆和蓄電池分配輸出功率,使得UUV混合動力系統的等效氫耗最小;外部路徑規劃層使用A*算法[19]選擇搭乘海流的切入點和切出點,使水下無人航行器能夠充分利用海流的流場。其優化架構如圖2所示。
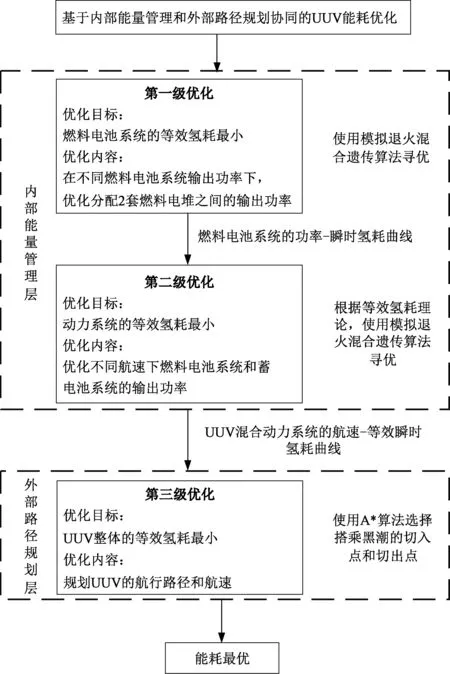
圖2 基于內部能量管理和外部路徑規劃協同的UUV能耗優化架構Fig.2 Energy consumption optimization architecture of UUV based on internal energy management and external path planning
4 UUV能耗優化模型
4.1 第一級優化
(1)目標函數
以燃料電池系統的瞬時氫耗最小為優化目標,在燃料電池系統不同輸出功率下,優化分配兩套燃料電堆之間的輸出功率。即:
(2)
式中,PFC為燃料電池系統的輸出功率;CFC(PFC)為燃料電池系統的輸出功率為PFC時,燃料電池系統的瞬時氫耗;PFCi為第i臺燃料電堆的輸出功率;cFC(PFCi)為第i臺燃料電堆的輸出功率為PFCi時,第i臺燃料電堆的瞬時氫耗[20]。
此時,燃料電池系統輸出功率PFC與各燃料電堆輸出功率PFCi之間的關系滿足:
(3)
式中,UFCi為第i臺燃料電堆的運行狀態,取1時,表示燃料電堆運行,取0時表示燃料電池電堆停機。
(2)約束條件
各燃料電堆的輸出功率應位于各燃料電堆輸出功率可達范圍內,可表示為:
PFCimin≤PFCi≤PFCimax或PFCi=0i=1,2
(4)
式中,PFCimax、PFCimin分別為第i套燃料電堆輸出功率的最大值、最小值。
4.2 第二級優化
(1)目標函數
在燃料電池系統供電時,為了使得在相同輸出功率下燃料電池系統的瞬時氫耗最小,兩臺燃料電堆之間的功率分配使用第一級優化的功率分配方案。并在此基礎上,以UUV混合動力系統的等效瞬時氫耗最小為優化目標,在不同航速下,優化分配燃料電池系統和蓄電池系統之間的輸出功率。即:
minCHPS(v)=CFC(PFC)+CB(PB)
(5)
此時
PB+PFC=fPm(v)+PAm
(6)
式中,CHPS(v)為UUV的航速為v時,UUV混合動力系統的等效瞬時氫耗;CB(PB)為蓄電池系統的輸出功率為PB時,蓄電池系統的等效瞬時氫耗;fPm(v)為UUV的航速為v時,推進電機所需功率[21]。
本文是依據等效氫耗理論,將蓄電池系統的耗電量轉換為對應的液氫質量,以便用于UUV混合動力系統的燃料經濟性分析。根據文獻[22,23]所述,蓄電池系統瞬時氫耗等效為:
(7)
(2)約束條件
1)蓄電池系統出力約束
蓄電池系統的輸出功率應位于蓄電池系統輸出功率的可達范圍內,可表示為:
PBmin≤PB≤PBmax或PB=0
(8)
式中,PBmax、PBmin分別為蓄電池系統輸出功率的最大值、最小值。
2)燃料電池系統出力約束
燃料電池系統的輸出功率應位于燃料電池系統輸出功率的可達范圍內,可表示為:
PFCmin≤PFC≤PFCmax或PFC=0
(9)
式中,PFCmax、PFCmin分別為燃料電池系統輸出功率的最大值、最小值。
4.3 第三級優化
(1)目標函數
在UUV混合動力系統供電時,為了使得在相同航速下混合動力系統的等效瞬時氫耗最小,燃料電池系統和蓄電池系統之間的功率分配使用第二級優化的功率分配方案。并在此基礎上,以UUV在起始點之間航行需要的等效氫耗最小為優化目標,在不同航速下,規劃UUV的航行路徑。即:
(10)
式中,C為UUV在起始點之間航行需要的等效氫耗;(i0,j0)為UUV當前時刻所在的經緯度;(i,j)為UUV下一個時刻所在的經緯度;SF為UUV的可行點集合;C(i0,j0)→(i,j)為UUV從(i0,j0)到(i,j)所需要消耗的液氫質量,可表示為:
C(i0,j0)→(i,j)=r(i0,j0)→(i,j)·t(i0,j0)→(i,j)
(11)
式中,t(i0,j0)→(i,j)為UUV從(i0,j0)到(i,j)所需要的時間;r(i0,j0)→(i,j)為UUV從(i0,j0)到(i,j)期間時,UUV的瞬時氫耗率,可表示為:
r(i0,j0)→(i,j)=CHPS(v(i0,j0)→(i,j))
(12)
式中,v(i0,j0)→(i,j)為UUV從(i0,j0)到(i,j)期間時,UUV的航速。
UUV航行于有水流速度的水域時,一般認為水流對船舶運動的影響僅屬于運動學上的范疇,只引起船舶運動上的漂移,可表示為:
v=vg+vc
(13)
式中,v為UUV相對于陸地的航速;vg為UUV相對于水流的航速;vc為水流速度。
(14)
式中,d(i0,j0)→(i,j)為UUV從(i0,j0)到(i,j)之間的距離。
(2)約束條件
UUV在航行時,航速應約束在一定范圍內。
vmin≤v≤vmax
(15)
式中,vmax、vmin為UUV航行時航速的最大值、最小值。
4.4 優化求解流程
(1)內部能量管理層
在內部能量管理層,本文使用模擬退火混合遺傳算法。模擬退火混合遺傳算法是將遺傳算法與模擬退火算法相結合的一種混合全局搜索算法。遺傳算法的局部搜索能力較差,但把握總體搜索過程的能力較強;而模擬退火算法具有較強的局部搜索能力,并能在搜索過程中避免陷于局部最優解[24]。本文將模擬退火算法和遺傳算法相結合,取長補短,以獲得更好的全局搜索能力。
(2)外部路徑規劃層
在外部路徑規劃層,本文使用A*算法。搜索算法大致可分為深度搜索和廣度搜索等。深度搜索的優點是搜索速度快、時間短,但是不一定能求出最優解;而廣度搜索優點是可以保證求出最優解,但由于其是一層層搜索,必須擴展每一個點,所以缺乏時間效率和空間效率。而A*算法將兩者結合,取長補短,既有極大概率求出最優解,又可以減少冗余時間[19]。
本文基于內部能量管理和外部路徑規劃協同的水下無人航行器能耗優化求解流程圖如圖3所示。
5 算例分析
5.1 內部能量管理層優化分析
(1)第一級優化分析
考慮燃料電池系統內部各電堆之間的功率分配策略,本文比較了2種方案。
方案1:基于規則控制,當PFC≤PFCimax時,只需一套燃料電堆運行。當PFCimax≤PFC≤2PFCimax時,一套電堆全功率運行,另一套燃料電堆承擔剩余負荷功率。
方案2:基于優化控制,使用模擬退火混合遺傳算法優化分配兩套燃料電堆之間的輸出功率。
方案1為方案2的對比方案。2種方案的瞬時氫耗優化結果如圖4所示。
由圖4可知,方案2優于方案1,在相同輸出功率下,最大可減少10.72%瞬時氫耗。和方案2相比,方案1雖然可以減少燃料電堆的啟停次數,但增加了燃料電池系統的瞬時氫耗,故在第二、三級優化分析中,不同燃料電池系統輸出功率下,兩套燃料電堆之間的功率分配采用方案2,具體功率分配如圖5所示。
由圖5可知,模擬退火混合遺傳算法優化分配燃料電池系統輸出功率的結果為2套燃料電堆各承擔燃料電池系統輸出功率的一半。
(2)第二級優化分析
考慮UUV混合動力系統內燃料電池系統和蓄電池系統之間的功率分配策略,本文比較了3種方案。
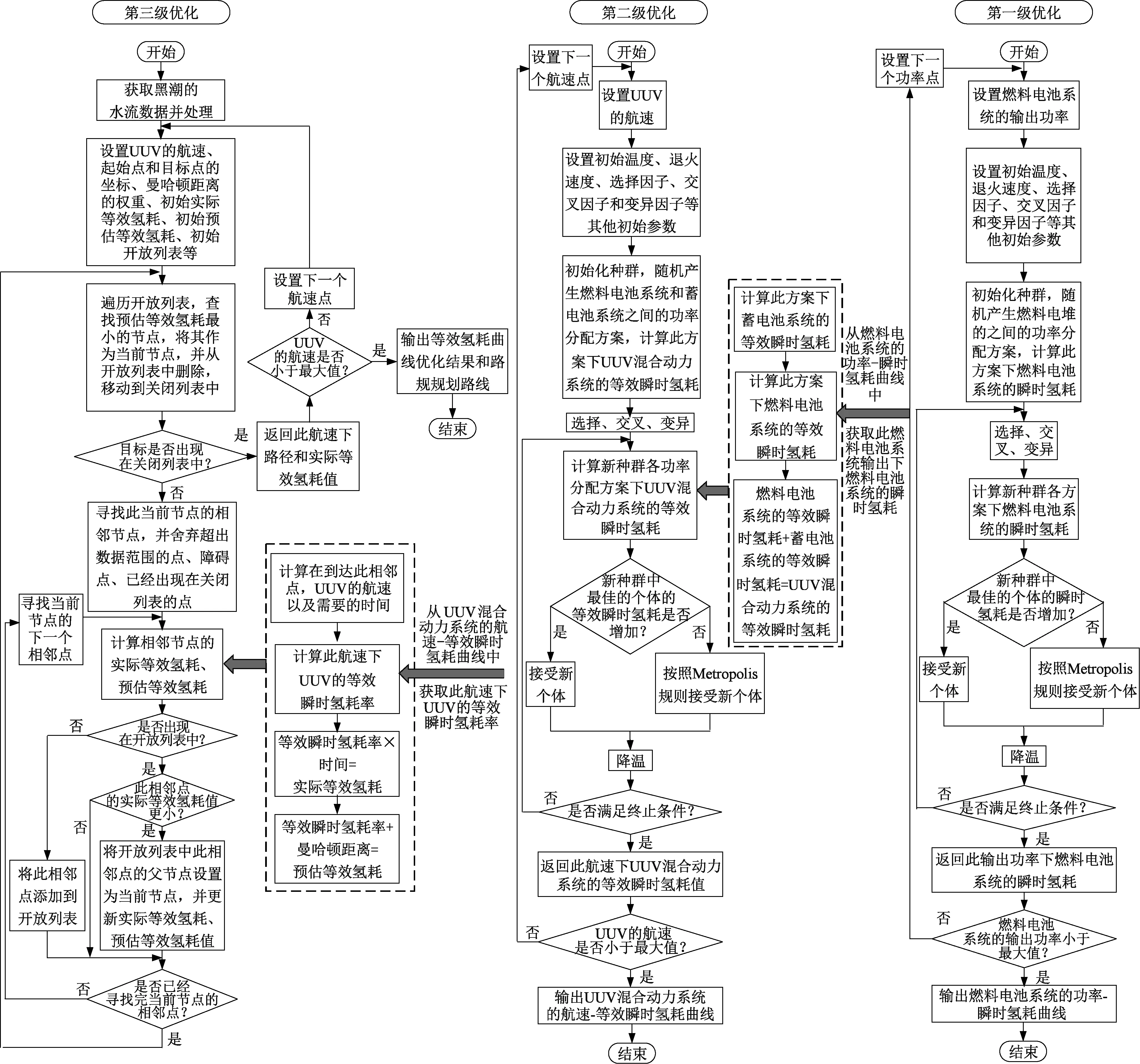
圖3 優化求解流程圖Fig.3 Flow chart of optimization solution
方案3:基于單能源,蓄電池系統單獨運行。
方案4:基于多能源規則控制,當UUV混合動力系統輸出功率小于等于4PFCimax時,燃料電池系統和蓄電池系統平均分配UUV混合動力系統輸出功率;當UUV混合動力系統輸出功率大于4PFCimax時,燃料電池系統全功率運行,蓄電池系統承擔剩余功率。
方案5:基于多能源優化控制,使用模擬退火混合遺傳算法優化分配燃料電池系統和蓄電池系統之間的輸出功率。

圖4 方案1和方案2的瞬時氫耗優化結果Fig.4 Optimization results of instantaneous hydrogen consumption in plan 1 and 2
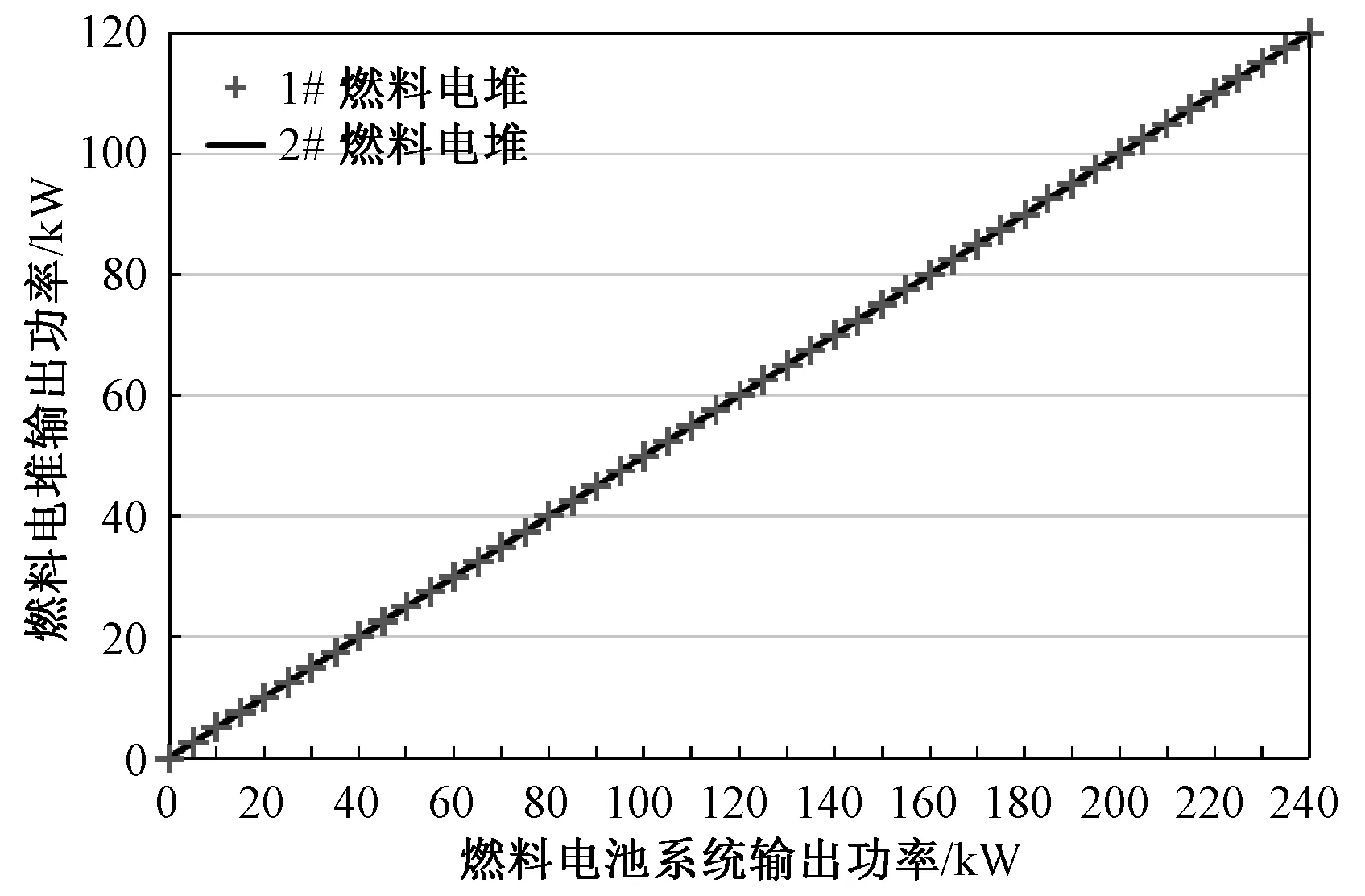
圖5 各燃料電堆在不同燃料電池系統的輸出功率下的出力曲線Fig.5 Output curves of each fuel electric reactor at different fuel cell systems output power
方案3、方案4均為方案5的對比方案。3種方案的等效瞬時氫耗優化結果如圖6所示。
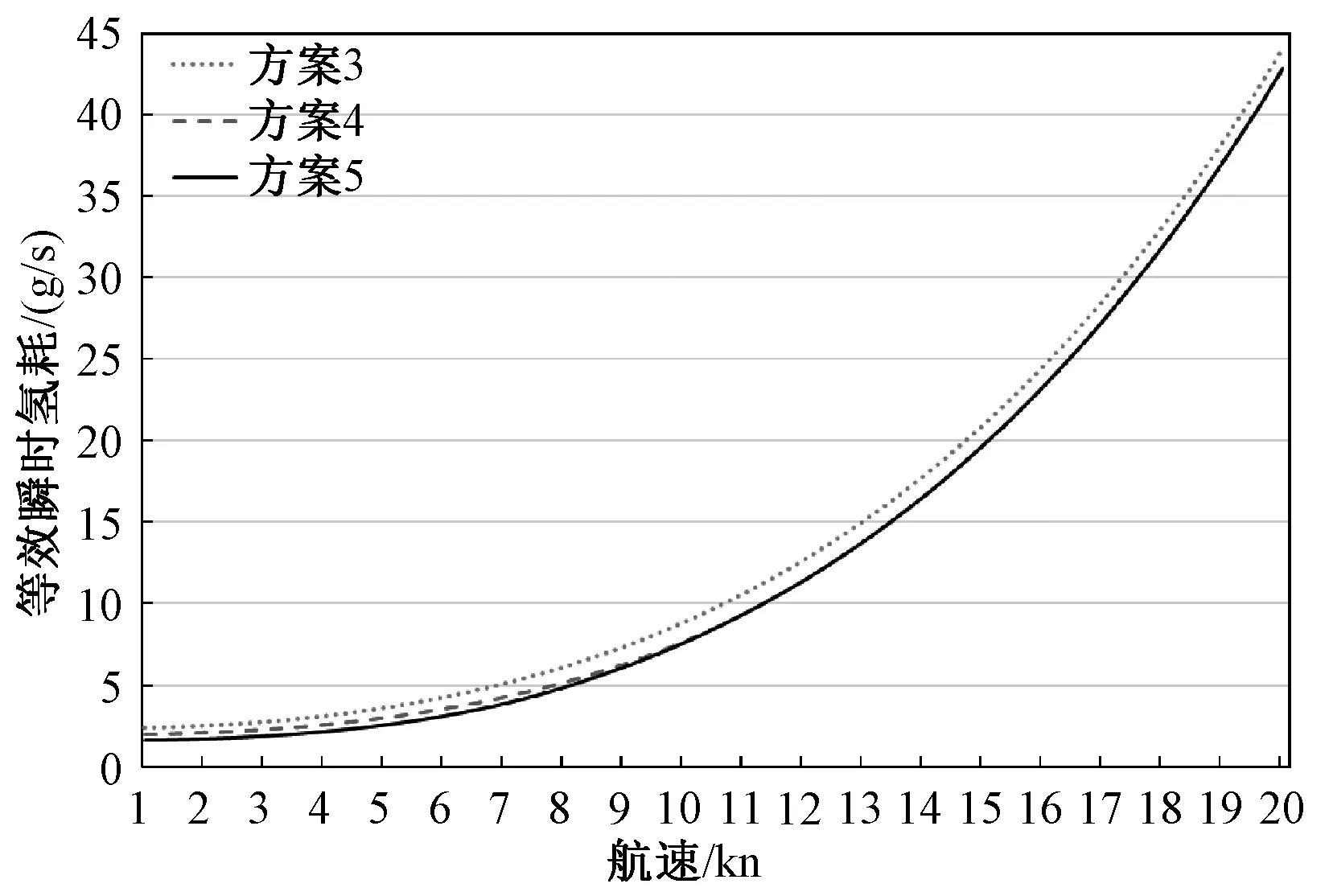
圖6 方案3~方案5的等效瞬時氫耗優化結果Fig.6 Optimization results of equivalent instantaneous hydrogen consumption in plan 3~5
由圖6可知,方案4和方案5優于方案3,表明燃料電池系統和蓄電池系統共同供電比蓄電池系統單獨供電可以很大程度上減少UUV混合動力系統的等效瞬時氫耗。同時,方案5優于方案4,表明使用模擬退火混合遺傳算法優化分配燃料電池系統和蓄電池系統之間的輸出功率優于燃料電池系統和蓄電池系統平均分配UUV混合動力系統輸出功率,故在第三級優化分析中,不同航速下,燃料電池系統和蓄電池系統之間的功率分配采用方案5,具體功率分配如圖7所示。
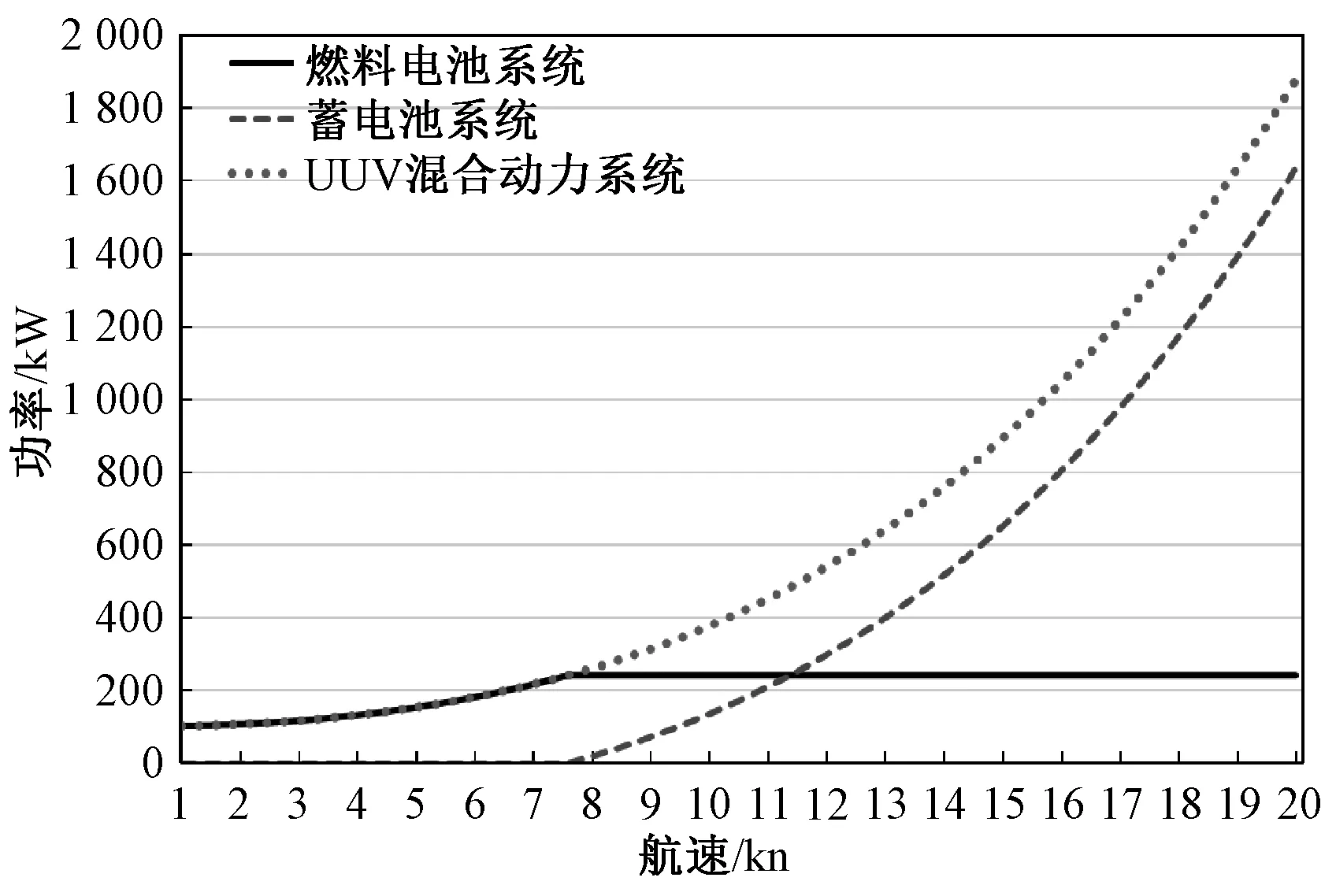
圖7 各系統在不同航速下的出力曲線Fig.7 Output curve of each system at different speeds
由圖7可知,當UUV航行在中低速(即1~11 kn附近)范圍時,UUV主要由燃料電池系統供電,當UUV航行在高速范圍時,燃料電池系統全功率運行,蓄電池系統承擔剩余負荷功率。
5.2 外部路徑規劃層優化分析
忽視海洋水環境影響,單獨考慮UUV是沒有實際意義的[17]。考慮海流及障礙物,本文從國家海洋科學數據中心截取了(32.5°N,140.375°E)到(41.25°N,149.125°E)部分的黑潮數據[25],采用直角坐標系對海洋水環境進行建模,充分利用柵格化建模的優點,使路徑簡單明了、易于實現,如圖8所示。

圖8 二維水環境地圖建模示意圖Fig.8 Schematic diagram of two-dimensional water environment map model
為了對比和分析內部能量管理和外部路徑規劃對UUV在起始點之間航行需要的等效氫耗和最優路徑的影響,設置了4種不同的優化方案,分別為:無優化,UUV由蓄電池系統單獨供電且選擇直達路線;單獨使用外部路徑規劃層,且UUV由蓄電池系統單獨供電;單獨使用內部能量管理層,且UUV選擇直達路線;內部能量管理和外部路徑規劃協同優化。
(1)單獨路徑規劃優化分析
由蓄電池系統單獨供電,從(32.5°N,140.375°E)出發到(41.25°N,149.125°E),UUV在不同航速下選擇直達路線和路徑規劃路線所需要的等效氫耗如圖9所示。
圖9 直達路線和路徑規劃路線下UUV在起始點之間航行需要的等效氫耗曲線Fig.9 Equivalent hydrogen consumption curves required for UUV to voyage between the start and end points under the direct route and route planning route
由圖9可知,由蓄電池系統單獨供電,直達路線下,當UUV的航速為11.3 kn時,UUV在起始點之間航行需要的等效氫耗最小為881.69 kg;路徑規劃路線下,當UUV的航速為11.6 kn時,在起始點之間航行需要的等效氫耗最小為868.06 kg。只考慮路徑規劃,UUV可節省1.55%等效氫耗量;當UUV航行在17.1 kn時,等效氫耗減少量最大為2.31%。
為使得UUV能夠充分利用黑潮的流場,由A*算法選擇搭乘黑潮的切入點和切出點,其規劃路線如圖10所示。
圖10 不同航速下的路徑規劃路線圖Fig.10 Path planning roadmap at different speeds.
由圖10所知,當v≥8.2 kn時,為了獲得更小的等效氫耗,UUV選擇繞路搭乘黑潮的前半部分;當v<8.2 kn時,UUV并沒有選擇搭乘黑潮,而是選擇直達路線。其原因為:UUV選擇搭乘黑潮,會由于繞路而增加UUV的路程,從而增加UUV在起始點之間航行需要的等效氫耗;UUV搭乘黑潮,會由于黑潮帶來的相對速度,從而減少UUV在起始點之間航行需要的等效氫耗;故當搭乘黑潮帶來的等效氫耗減少量小于繞路帶來的等效氫耗增加量時,UUV會選擇搭乘黑潮,否則,選擇直達路線。
(2)單獨能量管理優化分析
由燃料電池系統和蓄電池系統共同供電,從(32.5°N,140.375°E)出發到(41.25°N,149.125°E),UUV在不同航速下基于多能源優化控制的方案5和基于蓄電池系統單獨運行的方案3選擇直達路線所需要的等效氫耗如圖11所示。
圖11 基于多能源優化控制和基于蓄電池系統單獨運行時UUV在起始點之間航行需要的等效氫耗曲線Fig.11 Equivalent hydrogen consumption curves required for UUV to voyage between the start and end points based on multi-energy optimization control and based on battery system running separately at different speeds
由圖11可知,基于多能源優化控制的方案5在直達路線下,當UUV的航速為10.0 kn時,其在起始點之間航行需要的等效氫耗最小為631.03 kg,比基于蓄電池系統單獨運行的方案3在直達路線下,所需等效氫耗量減少了28.43%。
(3)內部能量管理和外部路徑規劃協同優化分析
UUV從(32.5°N,140.375°E)出發到(41.25°N,149.125°E),在不同航速下,基于內部能量管理和外部路徑規劃協同優化下的等效氫耗曲線如圖12所示。

圖12 基于內部能量管理和外部路徑規劃協同優化UUV在起始點之間航行需要的等效氫耗曲線Fig.12 Equivalent hydrogen consumption curves required for UUV to voyage between the start and end points based on internal energy management and external path planning
由圖12可知,基于內部能量管理和外部路徑規劃協同優化下,當UUV的航速為10.5 kn時,其在起始點之間航行需要的等效氫耗最小為616.50 kg,比蓄電池系統單獨供電在直達路徑下減少了30.08%的所需等效氫耗量。其規劃路線如圖13所示。
圖13 基于內部能量管理和外部路徑規劃協同優化的在不同航速下的規劃路線Fig.13 Planning routes at different speeds based on internal energy management and external path planning
由圖13所知,當v≥7.8 kn時,為了獲得更小的等效氫耗,UUV選擇繞路搭乘黑潮的前半部分;當v<7.8 kn時,UUV選擇直達路線。對比圖10和圖13可知,內部能量管理方案5通過減少相同航速下UUV混合動力系統的等效瞬時氫耗,從而減小UUV選擇繞路搭乘黑潮的起始速度。同時,在不同航速范圍內,UUV選擇繞路搭乘黑潮的路徑也不盡相同。
5.3 不同優化策略下的最小等效氫耗對比
由圖10~圖13可知,不同優化策略下的最小等效氫耗如表1所示。
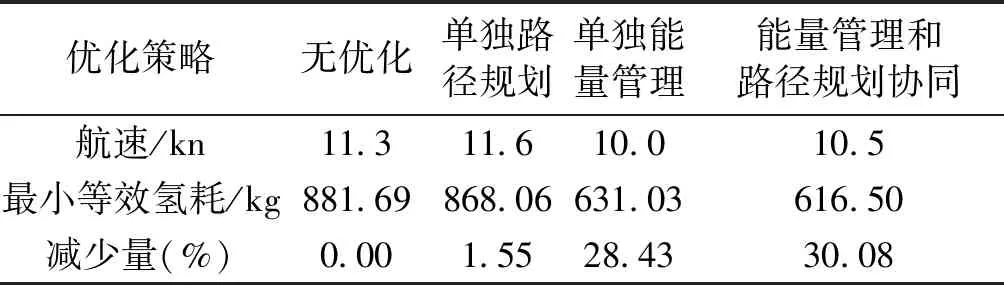
表1 不同優化策略下的最小等效氫耗Tab.1 Minimum equivalent hydrogen consumption at different optimization strategies
由表1可知,當UUV航行在11.6 kn時,單獨路徑規劃下,其在起始點之間航行需要的等效氫耗最小,但單獨能量管理策略優化下的等效氫耗并不是最小,說明能量管理和路徑規劃并不是通過簡單地相加就可以使UUV在起始點之間航行需要的等效氫耗更小,它們之間存在耦合關系。相比單獨能量管理優化和單獨路徑規劃,能量管理和路徑規劃協同優化能夠更大程度地減少UUV在起始點之間航行需要的最小等效氫耗。
6 結論
考慮搭乘海流的可能性,本文將UUV內部能量管理和外部路徑規劃協同,以提高UUV總體態勢感知,從而促進UUV做出更加穩健、高效的決策。并得出以下結論:
(1)為使得UUV混合動力系統獲得更小的等效瞬時氫耗,當UUV航行在中低速(即1~11 kn附近)范圍時,UUV由燃料電池系統供電;當UUV航行在高速范圍時,燃料電池系統全功率運行,蓄電池系統承擔剩余負荷功率。
(2)UUV有選擇性地搭乘海流可以使其在起始點之間航行需要的等效氫耗更小。當UUV的航速大于一定航速時,為了獲得更低的等效氫耗,UUV選擇繞路搭乘海流;當UUV的航速小于一定航速時,UUV選擇直達路線。
(3)能量管理策略方案通過減少相同航速下UUV混合動力系統的等效瞬時氫耗,減小UUV選擇繞路搭乘海流的起始速度,約4.88%。
(4)能量管理和路徑規劃并不是通過簡單的相加就可以使UUV所需的等效氫耗更小,它們之間相互耦合。且在本文所提協同優化策略下,UUV在起始點之間航行需要的等效氫耗可減少30.08%。
需要指出的是,本文對于不同壽命階段、不同故障類型下燃料電池和蓄電池之間的功率分配以及路徑規劃尚未進行考慮,如何綜合考慮系統壽命和故障對能耗的影響,將是下一步的研究重點。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34