單輪對多功能試驗臺液壓激振伺服系統的控制設計
2021-10-22 02:03:42楊麗婷周生通郭維年周新建
噪聲與振動控制 2021年5期
肖 乾,楊麗婷,周生通,郭維年,周新建
(華東交通大學 機電與車輛工程學院,南昌330013)
隨著我國高速鐵路的迅速發展,高速動車組作為高鐵系統的核心裝備,其輪軌關系將會影響高速列車的最高運行速度、車輪鏇修周期和高速鐵路的服役安全性[1],因此對其動力學性能的研究,特別是關于輪軌關系的研究,一直是世界高速列車研究的重要課題。目前,國內學者大部分通過現場實測或通過軟件模擬的方式研究輪軌力、輪軌噪聲、鋼軌波磨特性等對輪軌關系動力學的影響[2-4],取得了較好的研究成果,但通過現場實測的方式較為繁瑣且不便捷,為克服這一難題,本文介紹一種主要用于動車組輪軌關系試驗和輪軌作用機理研究的新型設備-單輪對多功能試驗臺,它通過高速調頻電機帶動車輪和鋼軌輪的對滾,達到仿真并測定其疲勞條件下的各種試驗數據,模擬車輪與軌道滾動摩擦磨損、滾動接觸疲勞、一系懸掛可靠性以及接觸振動等試驗;其中,液壓激振伺服系統是試驗臺的關鍵部分,它必須具備模擬高速動車組輪對在不同工況下軌道不平順引起的振動與沖擊的功能,對液壓激振伺服系統的跟隨性、響應時間和系統魯棒性等動態特性提出了更高的要求;因此,開展單輪對多功能試驗臺液壓激振伺服系統性能的研究具有重要科學研究意義和工程應用價值。
液壓激振技術按激振方式原理可以分為直流液壓激振技術、交流液壓激振技術、液壓射流激振技術和電液伺服激振技術[5]。Ruan 等[6]介紹了一種利用單閥芯的旋轉運動和直線運動的獨特的先導控制閥,可大幅度提高激振頻率。郝建功等[7]結合電氣與液壓傳動的性能優勢,開發出電液激振裝置,推導出該裝置相關參數的相互關系式。肖乾[8]等研究液壓減振器主要結構參數,利用建立的模型通過數字試驗全面分析各結構參數對阻尼特性的影響;毛陽等[9]基于武鋼一熱軋步進梁工作中出現設備老化等問題,從原系統的工作原理入手,運用模糊PID對系統進行控制,解決了步進梁在工作中的問題。石天飛等[10]在LNG儲罐穹頂液壓整體提升技術中,運用模糊控制原理,通過建立提升系統仿真模型,有效改善提升過程的不平穩性。李文華等[11]伺服電機驅動內嚙合齒輪泵為基礎,通過Simulink 軟件建立系統仿真模型,解決了節能液壓泵站控制系統效率不高和抗干擾性差的問題。Wei[12]通過建立管道和激波器組成的液壓激振伺服系統,經過控制變頻器的變頻調速,對管道不同點處的振動信號進行了采集和分析,研究并得出了液壓管道的振動控制規律。Ren等[13]設計了一種以諧振方式運行的高頻電液激勵系統,從水力共振的基本機理、控制方法和共振的利用等方面探討了水力共振的特點,為高頻狀態下實現穩態大液壓激振力研究奠定了基礎。
從已發表的文獻來看,國內外學者對液壓激振伺服系統已有一定的研究,并取得了較好的研究成果,但大部分都是基于液壓系統伺服閥控制參數進行研究,針對液壓激振伺服系統的控制參數、結構優化和動態性能進行全面分析的研究成果較少,特別是針對單輪對多功能試驗臺的液壓激振伺服系統的研究成果尚未見諸報道。本文通過建立單輪對多功能試驗臺液壓激振伺服控制系統數學模型,選取液壓元件的主要結構參數,在Simulink 中采用自適應模糊PID的控制策略對單輪對多功能試驗臺液壓激振伺服控制系統的控制方式進行優化,并通過Simulink 和AMESim 的聯合仿真技術,將Simulink中經過自適應模糊PID 控制策略處理后的信號,作為AMESim中建立的單輪對多功能試驗臺液壓激振伺服系統模型的輸入信號,實現單輪對多功能試驗臺液壓激振伺服控制系統的動態性能研究,為液壓激振伺服控制系統設計提供依據。
1 系統的液壓原理和數學模型的建立
圖1所示為單輪對多功能試驗臺,主要由臺架、驅動裝置、模擬輪和液壓激振伺服系統組成,其中液壓激振伺服系統是關鍵。液壓激振伺服控制系統由液壓缸、液壓泵、伺服閥、連接管路及其他元件構成,液壓激振伺服系統液壓原理圖如圖2所示。

圖1 單輪對多功能試驗臺

圖2 液壓激振伺服系統原理圖
單輪對多功能試驗臺液壓激振伺服系統以慣性負載為主,采用電液力伺服控制,液壓激振伺服系統正常工作時,給定伺服閥指令電壓,伺服閥將指令電壓和系統反饋電壓相比較,得出偏差電壓信號并進行相應的放大,閥芯隨之進行快速換向,帶動液壓缸作往復運動,達到液壓激振的效果;其中,當系統管道內的流體壓力大于管道額定壓力時,將系統管道內的流體通過溢流閥卸荷到液壓缸中,保持系統的壓力穩定,防止出現管道爆裂等事故的發生;蓄能器在系統運行過程中能夠存儲能量、起到吸收液壓沖擊和消除脈動的作用。
根據液壓激振伺服控制的液壓原理圖,建立液壓系統數學模型,對液壓系統的動態特性進行研究。
液壓缸流量連續性方程[14]:

式中:QL為負載流量,Ap為活塞缸的有效面積,xp為活塞位移,βe為液壓缸有效體積彈性模量,pL為負載壓力,V2為液壓缸回油腔的容積,Ctp為液壓缸的總泄漏系數。
伺服閥是零開口四邊滑閥,供油壓力ps恒定,回油壓力p0為零,伺服閥的線性化流量方程為:

式中:Kq為系統流量增益,xv為閥芯位移,Kc為流量壓力系數。
液壓缸的輸出力和負載力的平衡方程為:

式中:mt為活塞的總質量;Bp為活塞及負載的黏性阻尼系數;K為負載彈簧剛度;FL為作用在活塞上的任意外負載力;Fg為液壓缸輸出力。
將上述的伺服閥控液壓缸的基本方程式(1)、式(2)、式(3)的拉普拉斯變換為:
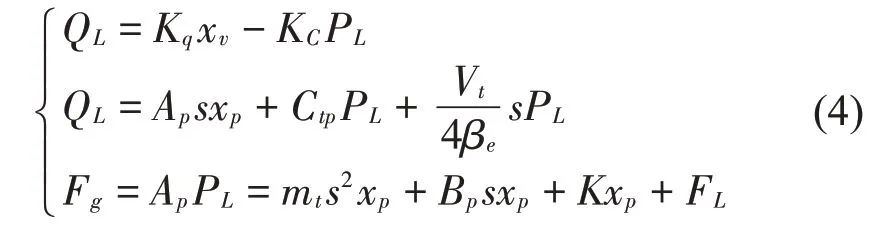
將式(4)簡化,得到流量Q至液壓缸輸出力的傳遞函數。

系統的開環傳遞函數為:

式中:Ka為伺服放大器的增益;Ksv為液壓閥的伺服增益;ξsv為伺服閥阻尼比;ωsv為伺服閥的固有頻率;ωr為液壓缸的液壓彈簧與阻尼系數之比;ω0為液壓缸的液壓彈簧與負載的固有頻率;ξ0為液壓缸的阻尼比;Ksv為系統總流量壓力系數。
2 Similink模型建模與仿真
2.1 建立simulink模型
本節以單輪對多功能試驗臺液壓激振臺為例,基于方程式(6)得出系統是由伺服放大器的1階積分環節、伺服閥的2 階振蕩環節和液壓缸的傳遞函數組成;因此,通過方程式(6)在Simulink軟件中建立控制模型。采用ODE45算法求解,得到液壓激振伺服系統的穩態響應,計算中采用的液壓激振伺服系統仿真參數和液壓激振伺服控制系統的仿真模型如表1和圖3所示:
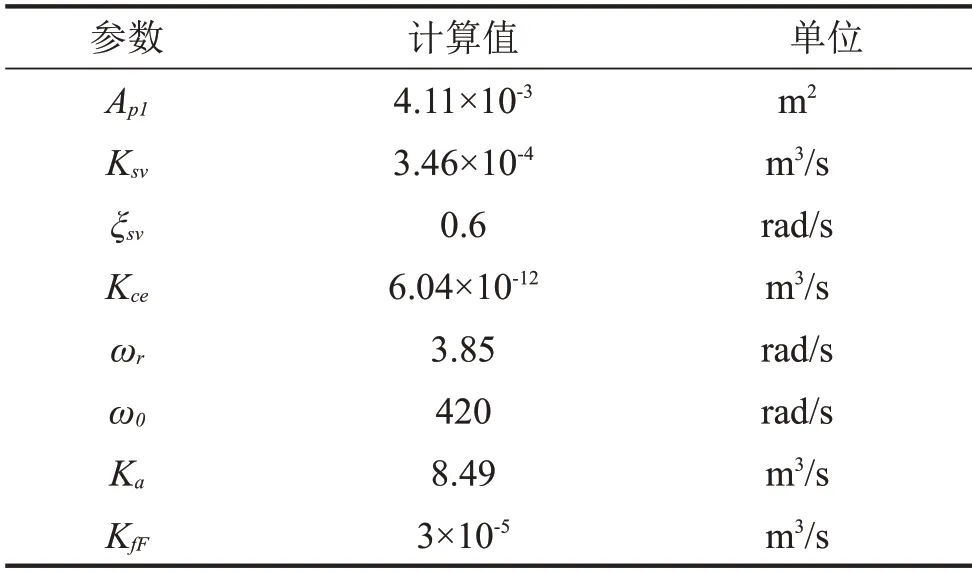
表1 仿真參數

圖3 液壓激振伺服控制系統的仿真模型
液壓激振伺服控制系統在輸入為階躍和正弦信號下的響應曲線如圖4和圖5所示。
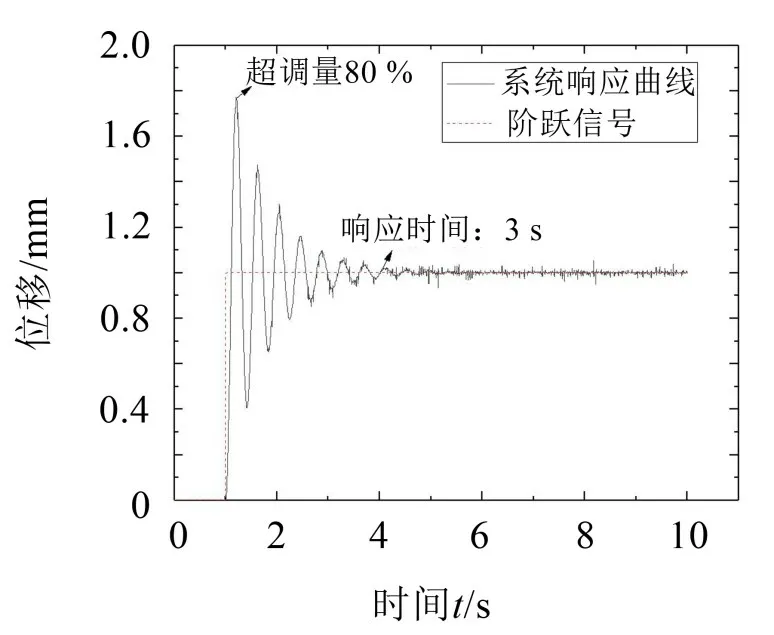
圖4 系統階躍響應曲線
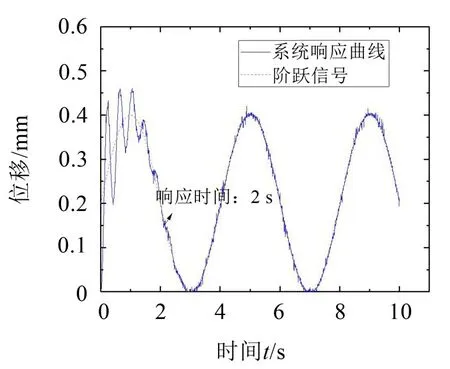
圖5 系統正弦響應曲線
2.2 模糊PID控制器的基本原理
模糊PID控制算法適用于不確定因素較多的系統,能根據系統的偏差和偏差變化率將模糊控制器分別進行模糊化,模糊邏輯推理,解模糊化等操作,最后做出最優控制參數的選擇,模糊PID 控制結構原理和基于自適應模糊PID控制的液壓系統仿真模型如圖6和圖7所示。

圖6 自適應模糊PID控制器結構

圖7 基于自適應模糊PID控制的液壓系統仿真模型
2.3 隸屬度函數
本文所述的液壓激振伺服系統模糊控制器擬采用二輸入三輸出的形式,自適應模糊PID 控制規則如表2 所示:以偏差e和偏差變化率ec作為輸入變量,Kp、Ki和Kd為輸出變量,E和EC的模糊論域量化為[-1,1],Kp模糊論域為[-1,1],Ki和Kd的論域取值為[-0.5,0.5]。
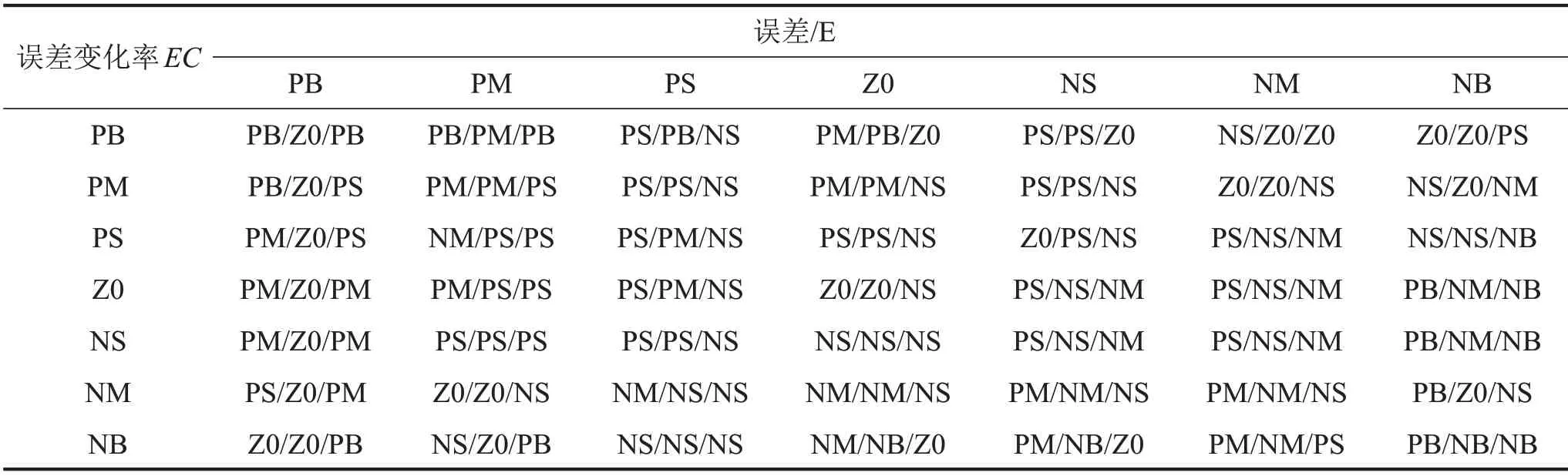
表2 自適應模糊PID控制規則表
2.4 模糊PID模型建模仿真
基于Simulink軟件的模糊控制器建模環境,采用重心平均的去模糊化方法,建立單輪對多功能試驗臺液壓激振伺服系統模糊PID 控制模型,整個模型由模糊控制器模塊、PID模塊、控制對象及輸入輸出等部分組成。
觀察圖4、圖5、圖8和圖9可以看出,采用自適應模糊PID 控制策略后,系統的響應時間誤差從原來的2 s 減少為0.5 s,響應速度提升了75%;超調量由原來的80%減小到3%,說明系統輸出響應時間和跟隨性明顯提升,具有較好的魯棒性,達到了液壓激振伺服系統控制優化的效果,能滿足系統設計的基本要求。

圖8 校正系統階躍輸出響應

圖9 校正系統正弦輸出響應
3 Simulink-AMESim聯合仿真
本節以單輪對多功能試驗臺的液壓激振伺服系統作為研究對象,將圖7的自適應模糊PID控制的液壓系統仿真模型作為基礎,在AMEsim 和Simulink中分別建立單輪對多功能試驗臺的激振伺服系統模型和控制協同仿真模型,如圖10 和圖11 所示;聯合仿真接口模塊,實現實時的聯合仿真。通過Simulink 與AMESim 聯合仿真,將正弦信號作為系統的原始輸入,分別研究負載、流量對液壓激振伺服系統控制效果的影響。
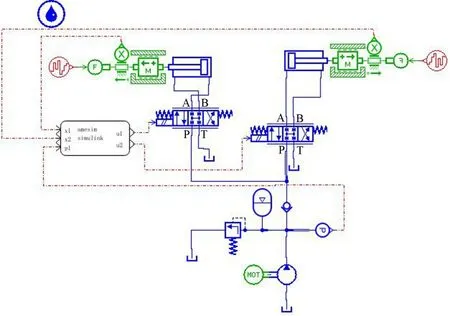
圖10 基于AMESim的系統仿真模型

圖11 基于Simulink和AMESim的自適應模糊PID控制協同仿真模型
(1)研究不同負載(不同車型的輪對質量)對系統控制效果的影響的影響。
不同車型的輪對質量如表3所示。
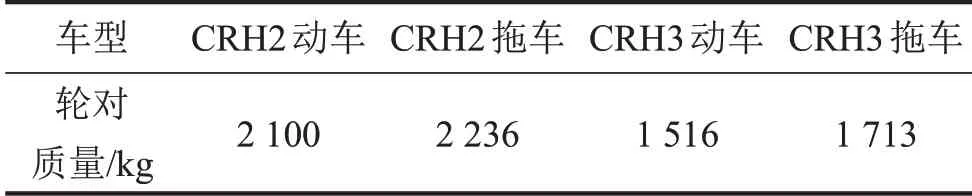
表3 不同車型的輪對質量
由圖12 可以看出,液壓激振伺服系統在以CRH2動車、CRH2拖車、CRH3動車和CRH3拖車的輪對質量為負載,系統的輸出響應曲線和以CRH3動車輪對質量為參照的輸出響應誤差曲線圖,可以發現:CRH2 動車、CRH2 拖車、CRH3 拖車的系統輸出響應誤差最大分別達到了0.011 4 mm、0.011 2 mm和0.011 5 mm,系統輸出響應曲線從波峰位置運動至波谷位置的出現了較大的輸出響應誤差;表明系統的輸出位移在液壓缸的極限位置(波峰、波谷)出現較大的偏移。

圖12 不同負載下的輸出響應
為進一步分析系統的輸出控制效果,以正弦信號作為標準,采用穩態跟蹤誤差百分比來對控制器輸出的誤差的離散程度做定量分析。

式中:IAP為系統穩態跟蹤誤差百分比;a(i)為正弦信號輸入,b(i)為不同工況在i次采樣時的輸出。
控制效果評價指標(不同車型)如表4 所示:由表4 可知,CRH2 拖車的IAP最大,其大小達到了18%,CRH2 動車、CRH3 動車和CRH3 拖車的IAP分別為23%、12%、10%;說明隨著車體輪對質量的增加,其輸出曲線誤差會隨之增大;因此,在針對不同車型的輪對進行實驗時,為保證實驗的準確性,應該適當調整伺服系統的油源壓力

表4 控制效果評價指標(不同車型)
(2)研究不同流量對系統的控制效果影響。
控制效果評價指標(不同流量)如表5所示。

表5 控制效果評價指標(不同流量)
由圖13 和表5 可以看出,液壓激振伺服系統在流量為20 L/min、30 L/min和40 L/min下系統的輸出響應曲線,可以發現:系統流量為20 L/min下的系統輸出位移響應在0 s~1 s 之間呈現一元線性回歸方程的曲線特性,同30 L/min、40 L/min情況下的流量輸出曲線相比出現較大的失真現象,IAP的大小達到了35%,遠遠大于30 L/min和40 L/min的IAP;同時,發現系統在2 s~10 s內,誤差也相應出現一些波動,但是從整體來看輸出曲線實現了穩定的輸出,說明系統在啟動的瞬間,輸入流量的大小會對系統的輸出效果產生較大的影響。
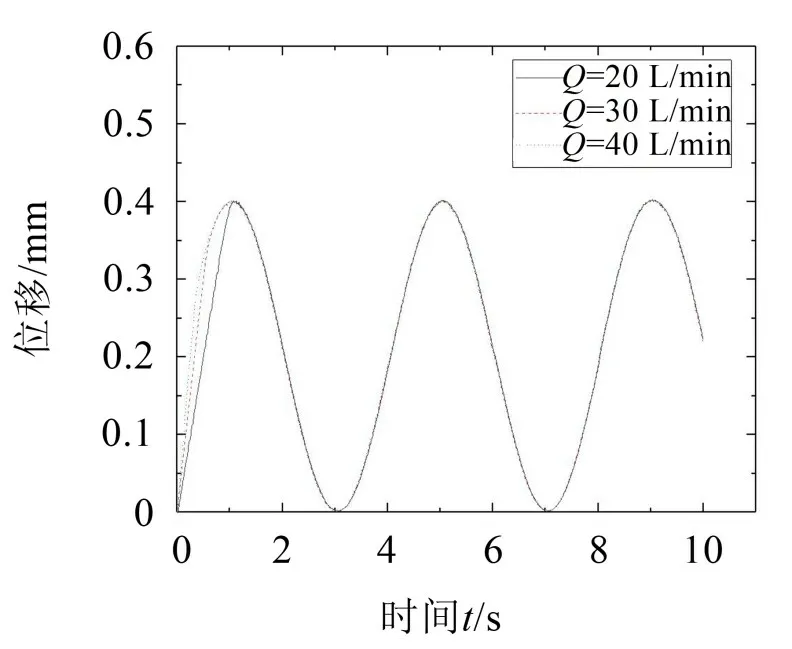
圖13 不同流量下的輸出響應
4 試驗研究
試驗基于單輪對多功能試驗臺,采用模糊自適應PID控制算法,驅動液壓伺服系統硬件,試驗硬件為研華科技的610L工控機,試驗臺外觀和試驗步驟流程如圖14和圖15所示。
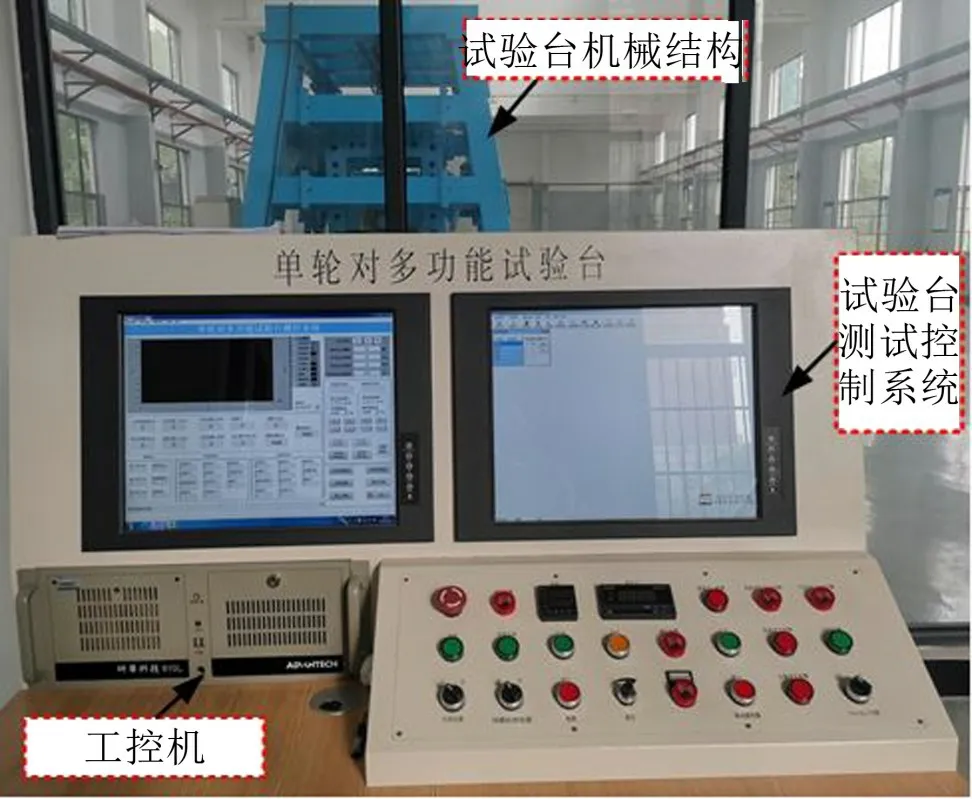
圖14 試驗臺外觀圖

圖15 試驗步驟流程圖
實驗以CRH3 動車的輪對質量作為負載,首先將輪對的速度調節到6.0 km/h,然后打開油源和伺服控制電源,逐步提升油源壓力至輸出曲線基于穩定狀態,輸出結果如圖16所示:可以發現,系統的輸出位移同給定的信號相比有大約0.05 s 的時間滯后,輸出的位移幅值是給定信號幅值的85%,產生了大約15%的誤差,由于試驗臺在安裝過程中會出現一些毫米級的定位誤差,在系統實際運行的過程中,輪對的慣性較大,主體結構的誤差傳遞還有液壓系統本身結構的誤差,會不斷累加導致液壓激振系統的輸出曲線與給定的輸入的曲線出現一些誤差,但從整體來看,輸出曲線呈現了較強的正弦特征,其輸出頻率、時間周期、波峰和波谷的對稱性與給定信號基本相似,考慮到實驗情況下會存在較多的外部影響因素,認定此輸出位移在可接受的實驗誤差范圍之內;說明本文中采用的自適應模糊PID 算法符滿足試驗臺液壓系統的設計要求,可以滿足科研項目的實驗和相關的測量。

圖16 試驗結果輸出圖
5 結語
本文以單輪對多功能試驗臺的液壓激振伺服系統為研究對象,建立了單輪對多功能試驗臺的液壓激振伺服系統的數學模型,設計了自適應模糊PID控制器,利用AMESim/Simulink建立了協同仿真模型,詳細討論外部負載和流量對系統控制效果的影響,并通過試驗討論分析:
(1)采用自適應模糊PID控制策略后,單輪對多功能試驗臺的液壓激振伺服系統,響應時間分別減少了1.5 s,對應的響應速度分別提升了75%,同時超調量減少了77%,說明系統的響應速度、跟隨性和魯棒性得到明顯的提升。
(2)研究不同車型輪對作為負載和不同流量作為輸入時的系統輸出響應,CRH2拖車的IAP最大,其大小達到了18%,說明隨著車體輪對質量的增加,輸出曲線誤差會隨之增大;同時發現,輸入流量的大小會對系統的啟動瞬間產生較大的影響。
(3)以CRH3 動車的輪對質量作為負載進行試驗,從整體效果來看,其輸出頻率、時間周期、波峰和波谷的對稱性與給定信號基本相似,說明本文中采用的自適應模糊PID算法符滿足試驗臺液壓系統的設計要求,可以用于科研項目的實驗和相關的測量。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
