民用飛機主動重心控制功能工程設計分析
2021-10-19 02:46:42趙躍明
民用飛機設計與研究 2021年3期
張 超 趙躍明 楊 俊 薛 峰
(航空工業第一飛機設計研究院, 西安 710089)
0 引言
飛機在飛行中由于燃油消耗、武器投放和飛行速度變化等原因,飛機重心與氣動焦點之間的距離發生變化,從而改變了飛機的靜穩定裕度。傳統的方式是預先設置合理耗油順序來控制機上燃油的消耗,以維持重心在安全限制范圍內,從而保證了飛機的飛行安全和品質,但在一定程度上限制了飛機性能的進一步發揮。
主動重心控制技術,是20世紀70年代提出的一種新的重心控制技術,其綜合考慮飛機的狀態、外部環境和任務需求,實時生成最優的燃油控制策略,通過控制機上燃油分布,實現對飛機重心的主動控制[1],以最大限度的提升飛機潛力。
目前,國外空客飛機中普遍采用主動重心控制功能來降低飛行阻力,提高燃油經濟性、增大航程并提高裝載能力,如空客的A310、A330、A380和A350飛機等[1-3]。圖144和協和號超音速客機通過主動重心控制功能實現氣動焦點與重心的合理匹配,來改善飛機在超聲速飛行時的飛行品質[1-3]。美國B-1B軍用轟炸機采用主動重心控制功能來改善飛機在不同后掠角下的飛行性能[4]。國內張晶開展了主動重心控制系統的方案和超聲速巡航時的仿真分析[5-6];楊曉科開展了變重量/重心時飛機的建模和姿態控制律設計[7]。房文林對重心調節過程中的液體晃動和防晃進行了研究[8]。賈磊開展了C919飛機縱向重心自動調控系統的原理設計與實現[9]。目前關于主動重心控制的研究均停留在數字和半物理仿真驗證層面,并未從工程設計的角度開展分析。
本文以A330飛機為例,從工程設計實現角度分析了主動重心控制功能的設計方法,對主動重心控制功能在工程實現中,涉及的功能設計、系統設計和存在的關鍵問題進行了分析,并提出了相應的解決措施。
1 功能原理
1.1 功能邏輯
主動重心控制功能的功能邏輯[5]如圖1所示。
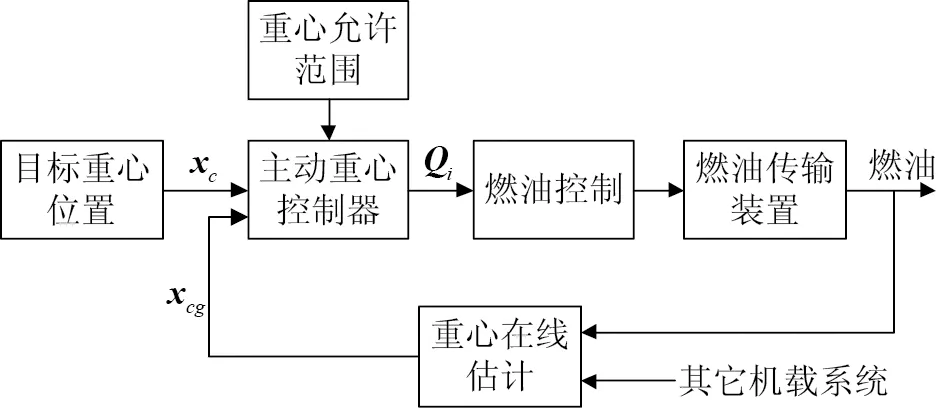
圖1 主動重心控制功能邏輯
其中目標重心位置xC根據飛機在不同飛行和任務剖面下的最優函數來確定;重心允許范圍來源于飛機的重心包線定義;主動重心控制器根據飛機的目標重心xC和重心實時在線估計xcg的差值,結合飛機重心允許范圍,計算出合理的燃油調節指令Qi,下發給燃油控制,以控制燃油轉輸裝置,實現燃油的重心調節,直至xcg與目標重心位置xC重合,從而獲得最佳操穩品質和巡航性能。
需要注意的是,對亞音速民用飛機而言,飛機目標重心位置一般由最小阻力和重心允許范圍共同確定。當最小阻力重心位置滿足飛機穩定邊界、操縱邊界約束時,目標重心即是最小阻力重心;否則,目標重心取重心允許范圍的邊界值,一般為飛機穩定邊界所決定的重心后限[10]。
1.2 油箱布置
主動重心控制功能主要依托燃油在不同油箱之間的轉輸來實現,因而燃油油箱的大小和布置方式,在一定程度上決定了主動重心控制功能的可用時間和使用效率。典型民用飛機,除了在機翼上布置傳統的油箱外,通常在水平安定面上配置有配平油箱,專門實現燃油的縱向配平轉輸,如圖2所示。
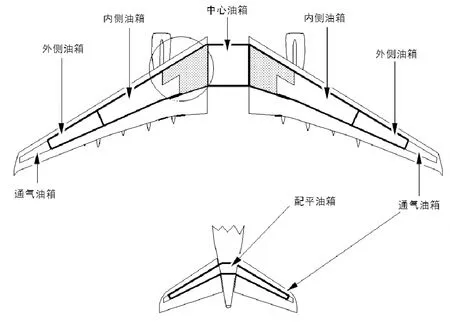
圖2 主動重心控制功能燃油油箱布置
顯然,水平安定面內布置配平油箱,可使得該部分燃油位置距離飛機重心較遠,因此只需要較少的燃油轉輸,即可獲得較大的飛機重心改變量。
2 功能設計
2.1 設計思想
考慮到主動重心控制功能是為優化飛機操穩品質和巡航經濟性而提出的多系統綜合功能,因此在工程設計實現中,從飛機的安全考慮,一般要求該功能失效后并不會影響傳統的燃油系統功能,從而為提高該功能的工程可靠性留有安全余量。
為滿足該設計要求,將燃油系統的控制劃分為傳統的燃油轉輸控制和基于主動重心需求的燃油轉輸控制兩部分。其中傳統的燃油轉輸控制主要包括機翼油箱之間的轉輸控制,該控制已非常成熟,本文不再贅述;而基于主動重心需求的燃油轉輸控制則主要指配平油箱和機翼油箱之間的轉輸控制,是主動重心控制功能所主要考慮的控制方式。
為了取得主動重心控制功能在安全性與飛行員負擔之間的平衡,分別設置人工和自動兩種控制模式。在人工模式下,飛行員可手動進行機翼油箱的前后轉輸;在自動模式下,則完全通過計算機實現機翼油箱的前后轉輸。考慮到飛行員有最高控制權限,一般要求人工模式可操控斷開自動控制模式。
2.2 使用場景
對民用飛機而言,主動重心控制功能的主要收益在于提高燃油經濟性。因此,該功能主要在巡航階段使用,以A330飛機為例,其運行場景如圖3所示。
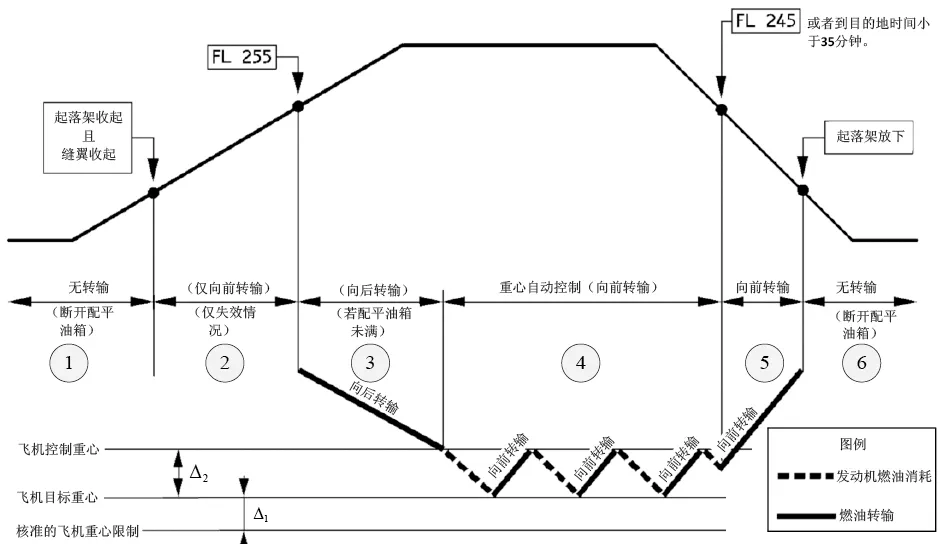
圖3 主動重心控制功能運行場景
按照飛行階段,分析主動重心控制功能的使用場景,如下:
1) 當飛機滑跑到起飛階段(階段①和②),主動重心控制功能不開啟;
2) 當飛機爬升到一定高度(FL255)后(階段③),由主油箱向配平油箱進行燃油轉輸,將飛機的重心調節到控制重心位置處;
3) 隨著燃油的消耗,飛機重心后移,到達目標重心位置處時,將配平油箱的燃油向前轉輸,使飛機重心再次到達控制重心處,如此反復(階段④);
4) 當飛機高度小于FL245或者到達目的地時間小于35 min時(階段⑤),將配平油箱的燃油向前轉輸,提高燃油的利用率;
5) 當起落架放下后(階段⑥),斷開配平油箱,此時主動重心控制功能斷開,燃油無轉輸。
需要強調的是,飛機的重心調節存在Δ1和Δ2兩個閾值。Δ1為核準的飛機重心限制與飛機目標重心之間的差值。當Δ1越大,飛機越安全,但主動重心的收益也越小,當Δ1越小,有可能由于飛機的姿態變化或者燃油測量誤差等,使得測量出來的飛機實時重心超過核準的實際重心后限,影響安全。Δ2為飛機目標重心與飛機控制重心之間的差值。當Δ2越大,燃油轉輸的次數越小,但主動重心的收益也越小;當Δ2越小,則燃油轉輸的次數更為頻繁,雖然主動重心的收益增加,但會影響燃油泵的使用壽命。
因此,Δ1和Δ2應結合傳感器精度和燃油泵壽命,以及飛機收益等參數進行綜合評定。
2.3 燃油向后轉輸
一般情況下,只有當飛機爬升到一定高度,且滿足如下條件時,燃油才會向后轉輸:
1) 起落架和襟縫翼收起;
2) 配平油箱非滿油;
3) 內側油箱的燃油質量大于一定值;
4) 飛機的高度高于一定值;
5) 飛機重心不在目標重心上。
在正常情況下,在每次飛行中,僅發生一次燃油向后轉輸。但當巡航時飛機重心在目標位置的前方超過一定閾值,且配平油箱的油量較低時,額外的向后轉輸就會發生,以保證飛機的重心始終處于合理范圍內。
2.4 燃油向前轉輸
當飛機重心向前移動時,飛機的靜穩定裕度增大,飛機變得更加穩定,但會帶來一定的操作負擔;而當飛機重心向后移動時,飛機的靜穩定裕度減小,甚至為負,飛機有可能變得極不穩定,考慮到飛機在巡航過程中,目標重心始終處于重心后限附近,且在燃油消耗過程中,飛機的重心也在向后移動,對燃油的前向轉輸控制就變得尤為重要。 因此當主動重心控制自動模式失效或者故障時,應通過人工控制模式,實現燃油從配平油箱到機翼油箱的前向轉輸,并實時向飛行員提供機翼油箱的油量信息,并在接近滿油時給飛行員以提示,以避免機翼油箱滿油溢出,從而保證飛機安全。
3 系統設計
3.1 系統架構
根據第2章的設計,主動重心控制功能與機上多個系統具有信號交聯,構建主動重心控制功能的系統架構,如圖4所示。
其中,主動重心控制器實現了最佳重心位置、重心允許范圍、重心在線估計和燃油調節指令解算等功能;燃油管理系統實現燃油的控制管理功能,并將指令下發給燃油轉輸裝置予以實現;而飛行控制系統、起落架控制系統、大氣系統和飛行管理系統等,則為主動重心控制器提供必要的數據進行控制邏輯解算;主動重心控制器解算的結果和狀態則通過座艙控制系統和顯示告警系統與飛行員進行交互。
3.2 座艙控制
根據第2章的設計,主動重心控制功能的座艙面板設計如圖5所示。
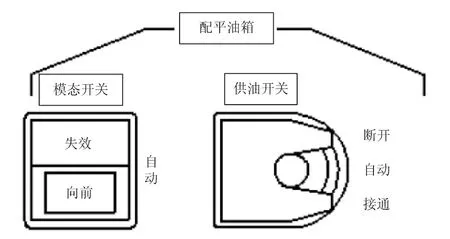
圖5 主動重心控制座艙控制面板示意圖
其中左側的模態選擇開關實現主動重心控制的人工/自動模式選擇。在正常情況下,處于“自動”位,當自動控制失效(“失效”燈點亮)時,或者飛行員可隨時人工直接選擇“向前”,實現燃油的人工前向轉輸,以保證飛機的重心安全。
同時,對配平油箱的燃油轉輸閥控制,可通過右側的供油開關實現。在正常情況下,為“自動”位,當人工選擇前向控制時,將其旋轉至“接通”位,當進入起降階段,或者飛行員認為不需要進行重心調節時,可置于“斷開”位。即飛行員可根據實際情況,自主接通和斷開配平油箱的轉輸,避免由于控制器失效而可能出現的不利情況。
3.3 顯示告警
顯示告警的目的是為了讓飛行員更直觀的觀察到燃油的轉輸,以及出現故障或者未按照程序執行時,能夠清晰的發現問題,并給飛行員提示處理措施。
3.3.1 ECAM顯示
飛機電子集中監視系統(ECAM)實現了各系統信息的實時顯示,在必要時為飛行員提供相應的故障處理建議。主動重心控制功能的顯示如圖6所示。
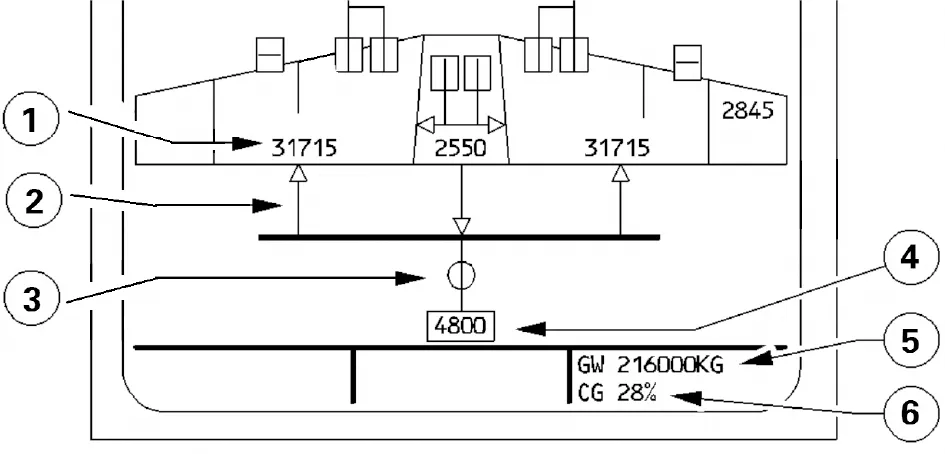
圖6 主動重心控制功能ECAM顯示示意圖
其中:①和④分別為機翼油箱和配平油箱的剩余燃油量,②為配平油箱與機翼油箱之間的轉輸指示,箭頭的方向與燃油轉輸的方向一致,當無轉輸時,二者之間無指示箭頭。③為配平油箱的斷開指示,當人工接通斷開按鈕或相關轉輸閥失效時,顯示為關閉狀態,否則為接通狀態。⑤和⑥分別為飛機的總重和當前實時重心顯示。當飛行員未輸入空機重量和重心時,此處顯示為虛線,同時當重心超過后限重心時,⑥會顯示為紅色,以提示飛行員按壓前向轉輸按鈕,將燃油向前轉輸。
3.3.2 告警和抑制
當飛機/系統處于危險、異常或者錯誤的狀態時,應通過告警向飛行員通告此時系統的狀態,以便空勤人員能夠及時采取應對措施,避免發生事故或者錯誤操作。但同時,在特定的飛行階段,應綜合飛行員的任務負擔和告警的緊急程度,進行綜合權衡,在不影響飛行安全的前提下,可通過告警抑制,減輕飛行員的操縱和心理負擔。對主動重心控制而言,其主要應用場景為巡航狀態,但巡航狀態的一些故障,亦會影響后續的進近著陸等飛行階段。因此,應全包線分析主動重心控制功能的故障告警和抑制。
在起飛前,系統應檢查飛行員是否正確輸入了飛機的零油重量重心,當未輸入,或者輸入不正確時,告無重量重心,或者零油重量重心不匹配等告警,并在起飛前檢查好后,從滑跑到著陸后的整個飛行階段,抑制該告警。
在巡航時,告警功能自動接通。此時主要監控主動重心控制系統的功能是否正常。對飛機實時重心、主動重心控制器和配平油箱轉輸閥的狀態進行實時監控。若重心超過后限范圍,或控制器、轉輸閥失效,則給飛行員以相應的告警。且只在巡航和進近著陸階段出現,而在起飛、爬升和地面滑跑等階段進行抑制。
在進近著陸時,告警功能應自動關閉。此時主要監控主動重心控制系統是否正常關閉,以及實時重心是否在安全范圍內。若重心超過允許范圍,或者控制功能未關閉,亦要給飛行員相應的告警,提示飛行員人工斷開主動重心控制功能,或者通過“人工模式”,手動將重心調整到合適位置,實現飛機的安全著陸。
綜上所述,給出主動重心控制功能的告警和飛行階段的抑制策略如表1所示。
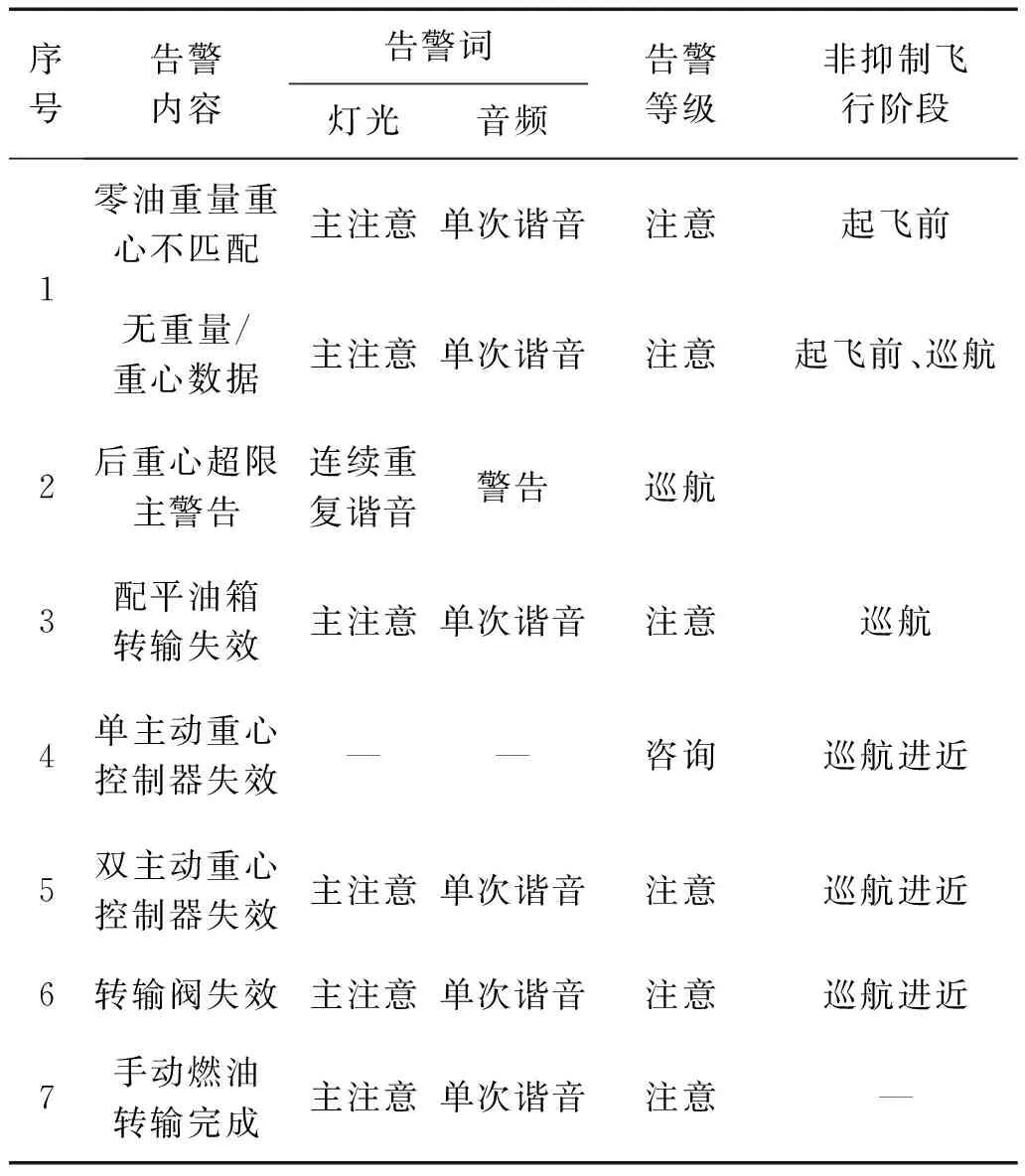
表1 主動重心控制功能告警和抑制
4 關鍵問題分析及解決措施
4.1 測量誤差
能否精確實現主動重心控制,取決于燃油系統和空機重量重心的測量精度。一般而言,飛機在出廠前,都會進行空機重量重心的測量,且精度較為準確[11],因而主要的誤差來源于飛機的燃油測量精度。
雖然文獻[12]從初始數據誤差、飛機裝載誤差和飛行過程中重心變化誤差等方面,對飛機的重心安全裕度進行分析,但還應考慮控制器的魯棒性設計。即為了最大限度的保證飛機的重心安全,重心不確定性和燃油轉輸可能會導致飛機實際的重心在重心包線之外,在實際重心約束范圍內預留一定的閾值,來避免由燃油誤差帶來的重心超限。具體的閾值取值可參考2.2節的分析。
4.2 系統監控
考慮到重心的計算和控制均是通過主動重心控制系統實現的。當該系統出現故障時,存在重心控制或者顯示錯誤的可能性。此時若無非相似監控通道,有可能會嚴重影響飛機的飛行安全。
因此,除了常規的主動重心控制系統實施的加權重量重心解算方法外,還在飛行管理系統中設置了非相似的基于飛機氣動力模型的重量/重心備份解算方法,如圖7所示。
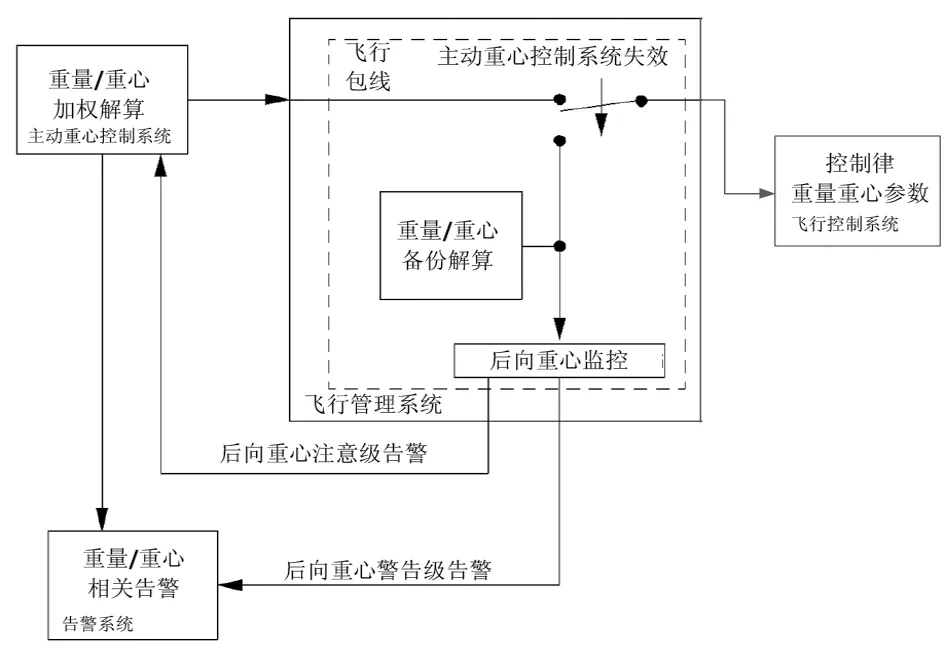
圖7 主動重心控制重心后限監控原理
當監測出飛機的重心超過允許的邊界范圍后,及時觸發告警,由飛行員進行人工控制,以確保飛行安全。
4.3 系統重啟
當主動重心控制系統在空中失效后,由于人工控制會極大地增加飛行員的操縱負擔,因而應允許通過計算機重啟的方式重啟功能。
若重啟成功,應提示飛行員重新輸入當前的重量和重心,避免由于信號丟失或者數據不可靠,導致當前重量重心與實際偏差太大。若重啟失敗,應根據初始油量和發動機的耗油率估計機上的油量,計算飛機的實時重心,并在不同的高度和速度下,給出燃油轉輸、著陸速度、著陸姿態等建議,供飛行員參考。
5 結論
本文在介紹主動重心控制功能原理的基礎上,開展了以下幾項分析:
1) 功能的使用場景和前后轉輸邏輯等功能設計分析;
2) 功能的系統架構、座艙控制和顯控告警等系統設計分析;
3) 梳理了主動重心控制功能在工程實現中要考慮的關鍵問題,并提出了相應的解決措施。
本文可供我國先進民機的主動重心控制功能的工程研制參考借鑒。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
