基于TransModeler仿真的浮動車比例取值方法研究
2021-10-14 10:40:44焦朋朋李義罡楊紫煜
北京建筑大學學報 2021年3期
安 玉,焦朋朋,李義罡,楊紫煜
(北京建筑大學 北京未來城市設計高精尖創新中心, 北京 100044)
實時準確地獲取動態路網交通運行狀態對實現高效交通信息服務系統十分重要。浮動車檢測技術,是一種在20世紀90年代興起的新型動態交通信息采集技術。它通過具有特殊定位系統和無線通信設備的交通載具,收集以時間為序列的車輛坐標、車輛速度等交通信息。之后將所得數據上傳至中央處理站處理,建立信息控制數據庫。不同服務對象可實時在線獲取多樣化的交通信息,利用整個路網的隨機樣本不斷反映總體情況。相比于傳統的環形線圈檢測器和微波雷達檢測器等固定源數據檢測器,通過浮動車檢測技術采集交通信息具有設備建設周期短、檢測覆蓋面大、數據實時性強和維護費用較低等優點,極大地補充了原有的交通信息采集方法。然而,浮動車檢測技術也易受個體差異性的影響,表現為浮動車系統網絡覆蓋可靠性差等缺點。所以浮動車的比例需滿足路網中交通信息采集精度和可靠性的要求。
浮動車檢測道路中車輛的瞬時速度、經緯度坐標等信息,并按照一定的時間間隔及時傳輸到交通控制中心,通過對傳輸數據的分析,判斷道路的運行狀況并做出決策,改善道路運行狀況。對浮動車系統而言,浮動車占全部車輛的比例對其覆蓋性和數據可靠性有著顯著地影響。通常情況下,浮動車比例過小,增加了個體隨機性的影響,并影響所采集交通數據的可靠度;浮動車比例太大,增加了系統的安裝和維護成本,也增加了信息處理負荷度。所以對浮動車比例的選取進行研究,可以達到在成本增加較少的前提下獲取高精度交通參數的目的,為城市智能交通系統運營提供理論基礎,具有較高的實際應用價值。
1 浮動車比例取值方法介紹
隨著浮動車系統的不斷成熟,近年來國內外學者對浮動車的研究重點逐漸從浮動車系統的數據輸入和交通信息處理方法轉移到研究浮動車比例和配置上,確定合適的浮動車比例可以協調數據采集成本與提升數據精度的矛盾,為浮動車信息采集系統提供可靠的數據支撐,浮動車數據從采集到統一整合,應用相關的計算模型和算法進行處理,推算得到路網的交通狀態信息,為道路交通優化提供支撐[1],浮動車信息采集系統如圖1所示。浮動車比例的取值方法可大致分為3種。
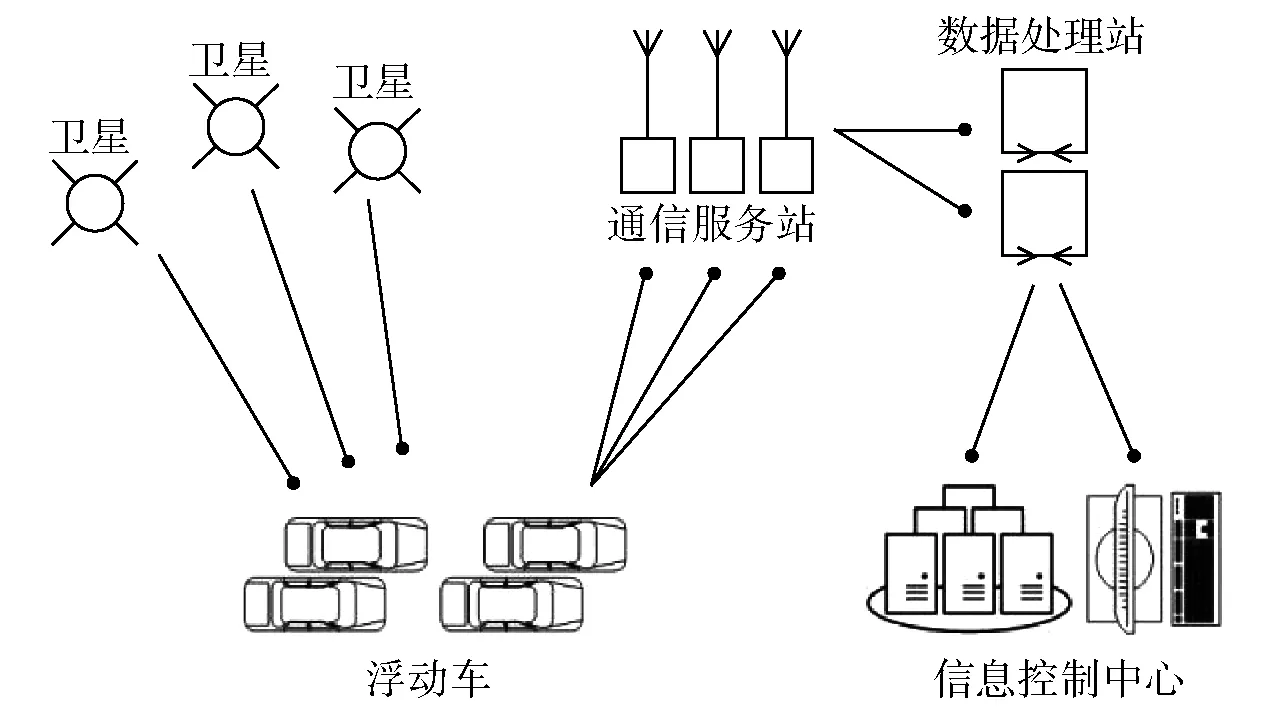
圖1 浮動車信息采集系統Fig.1 Floating vehicle information collection system
1.1 數理分析法
數理分析法利用現實中浮動車比例的數據來驗證路網中的浮動車比例能否滿足要求的數據精度條件。因此當實際數據缺乏變化時,數據的層次較少,只能做少量驗證,難以進一步求解出合適的浮動車比例。胡繼華等[2]利用廣州市的城市出租車數據,通過數理分析法在控制一定空車率的基礎上給出了浮動車的合理規模。趙翔宇等[3]以5 min的交通需求和流量進行數據集計分析,取15 min為交通數據分析期,得出在6:00—24:00的內環內、外的出租浮動車覆蓋比例隨空間變化,且其覆蓋路段的比例在60%左右,公交浮動車覆蓋比例在晚高峰時段明顯降低。
1.2 抽樣比較法
通過抽樣比較法計算浮動車比例的前提條件是當前規模浮動車所得到的路況真實可靠。抽樣分析法包含路網覆蓋率法、浮動車分步法、平均速度估計法等。辛飛飛等[4]通過深圳市的實證數據分析了浮動車比例和路網覆蓋能力的關系,揭示了浮動車數據對路網覆蓋率的時變特性。曾維等[5]對抽樣后的數據與總體規模數據做了相似性分析,并以此確定浮動車比例。因此,在用抽樣比較法計算浮動車比例之前,需要對浮動車數據的有效性進行檢驗。劉麗娜等[6]在確定浮動車最小樣本數量的研究綜述中,總結了不同浮動車比例確定方法的可行性與優缺點。在抽樣比較法中,路網覆蓋率的方法考慮了多種路段類型,但未考慮交通流估計精度的影響;基于浮動車分布的方法假設路網車輛分布均勻,與實際情況不符,需采集大量實際數據確定重復因子。
1.3 仿真實驗法
利用仿真實驗法方便精準地模擬不同道路結構以及在交通流參數時變的條件下車流運行狀態。林思等[7]利用Vissim仿真十字交叉口發現:當浮動車比例在3%~5%時,平均行程時間準確度可達95%以上。唐克雙等[8]提出了基于交通仿真軟件Vissim的實時仿真實驗分析法,通過30組上海市陸家嘴實驗分析浮動車比例和數據采樣頻率,得到當浮動車比例為8%和采樣頻率為0.1 s時達到最優。
仿真實驗法通過對交通系統進行仿真實驗獲取相關交通參數,并利用參數得出的交通流狀態變化情況分析浮動車比例與交通參數精度之間的關系。與數理分析法和抽樣比較法相比,仿真實驗法不需實際交通系統的參與,僅通過仿真實驗便可以產生全面豐富的實驗數據,因而具有經濟高效、計算便捷和可重復性高的優點。仿真實驗法可對任何實際路網進行高精度復原模擬,所得結論更全面。與常用的Vissim仿真相比,TransModeler實現了微觀仿真和宏觀仿真的集成,可根據路網范圍和仿真解析度選擇合適的仿真模型,適用于大型路網下滿足覆蓋性要求的浮動車比例確定。綜上所述,本文將建立基于TransModeler仿真的浮動車比例取值方法,確定滿足實驗路網要求的浮動車比例。
2 基于TransModeler仿真的浮動車比例取值方法
TransModeler是美國Caliper公司根據最新的交通理論研究成果、仿真手段和軟件技術開發的多功能綜合交通仿真軟件。該軟件一方面具有強大的仿真建模能力,可以模擬從高速公路到市中心區路網在內的各類道路交通網絡,詳細逼真地分析大范圍多種出行方式的交通流;另一方面,還具有強大的仿真結果分析功能,輸出統計指標豐富,包括交通量、平均速度、交叉口延誤等。TransModeler仿真軟件[9]強大的功能為通過仿真實驗法計算路網浮動車比例提供了技術支撐,基于此軟件可以構建一套浮動車比例的取值方法。
2.1 平均行程車速相對誤差計算方法
為衡量不同浮動車比例的適用情況,需比較通過浮動車獲得的交通參數與路網實際交通參數之間的誤差,包括路段交通流量、車流速度和行程時間。平均行程車速相對誤差能較好代表路網交通運行狀態,所以本文選取其作為衡量依據,通過平均速度可以推算出交通流量、交通流密度等重要參量。在目前國內外常用的獲取平均行程車速的方法中,空間平均法因其原理簡單、計算方便而應用廣泛。空間平均法計算平均行程車速的原理是:以浮動車系統輸出數據的時間間隔作為固定時間間隔,在每個固定的時間間隔內輸出一次浮動車的平均行程車速。考慮現實的浮動車系統情況,選取5 min作為固定時間間隔較為適宜[10]。本文以一條包含了3個路段的城市路網主干道為例,說明空間平均法計算平均行程車速具體步驟。
在如圖2所示的一條城市路網主干道上,浮動車的3個相鄰數據輸出點A1、A2和A3分別在路段L1、L2和L3上,通過3個相鄰數據輸出點的時刻分別為tA1、tA2和tA3。假設浮動車在2個相鄰的數據輸出點間勻速行駛,則浮動車在路段L2的路段行程時間可由浮動車經過路段節點2和節點3的時刻求差值確定,即:
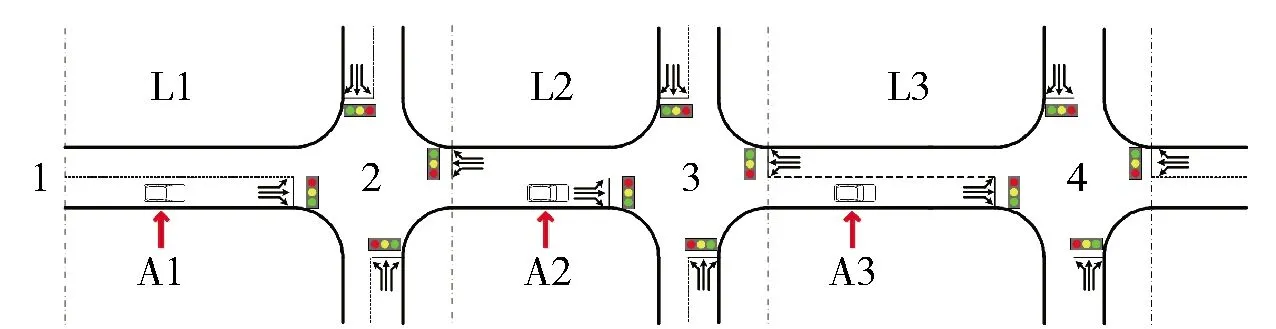
圖2 主干道空間平均法計算示例Fig.2 Whole calculation process of the model
tL2=t3-t2
(1)
式中:tL2表示浮動車在路段L2的路段行程時間,單位為h;t3表示浮動車通過路段節點3的時刻;t2表示浮動車通過路段節點2的時刻。
浮動車通過節點2的時刻為:
(2)
式中:tA1和tA2分別表示浮動車通過數據輸出點A1和A2的時刻;RA1-2表示數據輸出點A1到節點2的路段長度,單位為km;RA1-A2表示數據輸出點A1到數據輸出點A2的路段長度,單位為km。
同理得浮動車通過節點3的時刻:
(3)
式中:tA2和tA3分別表示浮動車通過數據輸出點A2和A3的時刻;RA2-3表示數據輸出點A2到節點3的路段長度,單位為km;RA2-A3表示數據輸出點A2到數據輸出點A3的路段長度,單位為km。

(4)
進一步可以算出浮動車在路段L2的平均行程車速vL2:
(5)
式中:RL2為路段L2的長度,單位為km。
為分析浮動車系統在當前浮動車比例下各路段的估計精度,通過浮動車檢測數據和各公式計算出各路段的估計平均行程車速v,通過仿真軟件可以獲取各路段的真實行程車速vt。定義路段平均車速相對誤差θ為:
(6)
2.2 浮動車比例取值方法步驟
基于以上對空間平均法計算平均行程車速的說明,得出基于TransModeler仿真軟件的浮動車比例取值方法步驟。
第1步:建立相對誤差和浮動車比例的函數關系式F:
θ=F(P)
(7)
式中:θ表示通過浮動車數據計算出的平均行程車速與真實平均行程車速之間的相對誤差;P表示浮動車占全部車輛的比例,即P與θ滿足函數映射關系F。
第2步:確定路網條件及各變量取值,進行仿真實驗。本方法主要確定P與θ之間的關系,因此其他交通參數如路網中各路段屬性、路網交通需求等均需在仿真開始前設定。通過仿真實驗獲取不同浮動車比例下浮動車的平均行程車速和真實行程車速,并進一步計算得出不同浮動車比例下的誤差值。

(8)

(9)
則在時間間隔μ內路段通過的浮動車數VFμ應滿足:
(10)
若不滿足式(10),則認為此時段浮動車數據無效,應予剔除。
第4步:確定最佳效用值。隨著浮動車比例P的不斷增大,車速相對誤差θ會不斷縮小,但無限增大P不僅不現實,也會帶來更高的成本。考慮到在P增加到一定程度后,繼續增大P對θ的改善作用十分有限,因此假定存在最佳改善值ψ,在改善作用達到該值時就可以認為獲得了最佳效用值P*,車速相對誤差θ、浮動車比例P和最佳改善值ψ之間存在如下關系:
(11)
以函數形式則可表示為:
F′(P)=ψ
(12)
假設導數函數F′存在反函數G,則易得:
P*=G(ψ)
(13)
式中:P*即為求得最佳效用的浮動車比例。
基于TransModeler仿真軟件的浮動車比例取值方法主要包括網絡建模、仿真計算和精度分析3個模塊。圖3為基于TransModeler仿真軟件的浮動車比例計算方法框架。

圖3 基于TransModeler的浮動車比例計算方法框架Fig.3 Framework of calculation method of floating vehicle based on TransModeler
3 數值分析
為驗證所建立的浮動車比例確定方法具有一般適用性,建立了如圖4所示的經典Florian路網,進行數值分析。Florian路網設計原理采用多路徑交通分配法,與傳統單路徑相比,克服了流量全部集中于最短路的不合理現象。各出行路徑長度取決于對應路徑的流量分配大小,反映了出行路線被選擇的概率隨該路徑長度增加而減小的客觀規律,且充分考慮了路權與交通負荷之間的關系,即考慮了道路通行能力的限制。仿真算例的設計充分考慮了出行者的路徑選擇問題,符合實際交通路網,在國際上較為通用。
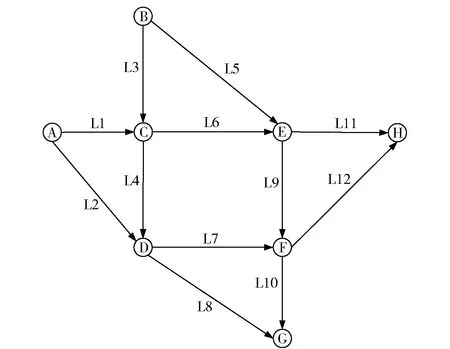
圖4 路網拓撲圖及O-D交通需求Fig.4 Road network topology and O-D traffic demand
3.1 數據基礎
網絡拓撲圖及各O-D對之間真實的交通需求如圖4所示。該路網包含8個節點,12個路段,4個O-D對分別為A-G、A-H、B-G和B-H。仿真運行時間為早高峰7:30—8:30時段,仿真時長為60 min,其中7:15—7:30為仿真預熱時段,預熱時段的出行需求量與研究時段開始時的出行需求量相同,數據統計計算周期為5 min。路網中各O-D對之間的O-D需求見表1。TransModeler仿真路網和節點E車道組成情況如圖5和圖6所示,仿真模型中車輛跟馳與換道相關參數按默認取值。

表1 真實O-D需求表
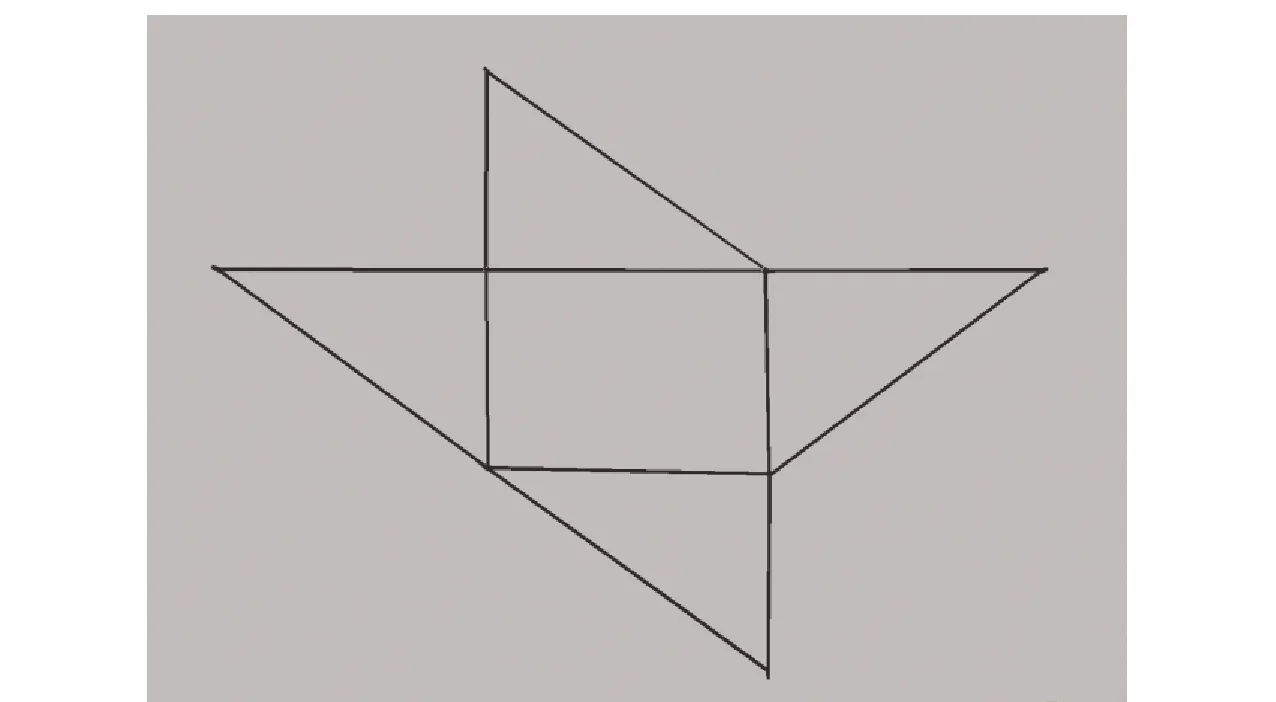
圖5 TransModeler仿真路網Fig.5 TransModeler simulation road network
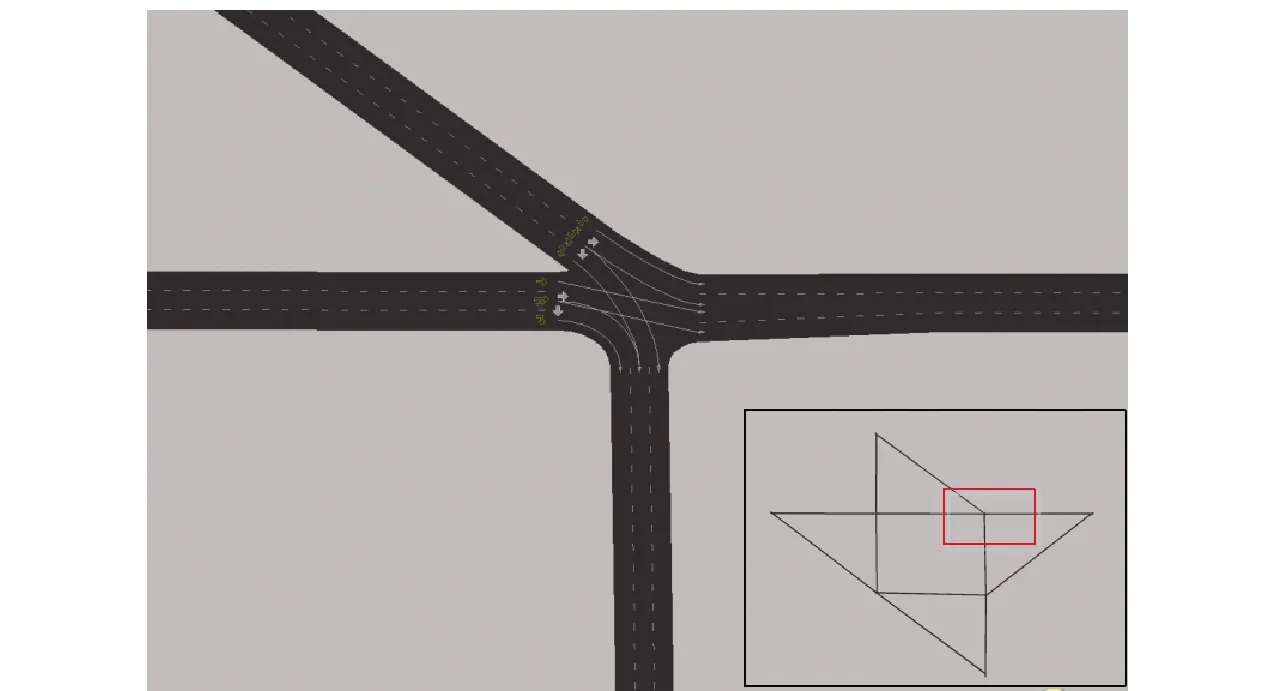
圖6 節點E車道組成Fig.6 Composition of node E
路網中各路段的基本交通屬性參數見表2。
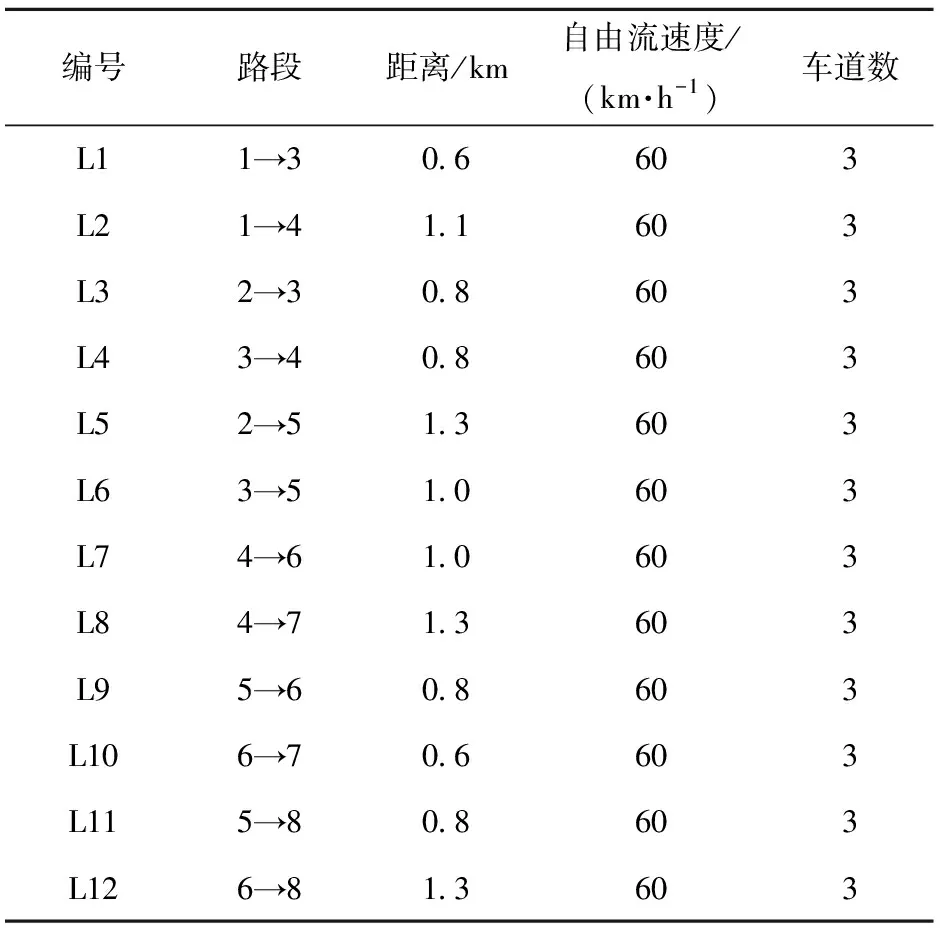
表2 路網中路段基本屬性參數
3.2 求解結果及分析
按照2.2節所示的基于TransModeler仿真的浮動車比例取值方法步驟,完成對案例路網的網絡建模、仿真計算和精度分析。從案例路網中選取路段L11進行分析,整理仿真得到的浮動車比例P與通過浮動車數據計算方法得到的計算平均行程車速v、通過仿真軟件獲得的真實平均車速vt和車速相對誤差θ的對應值關系見表3。
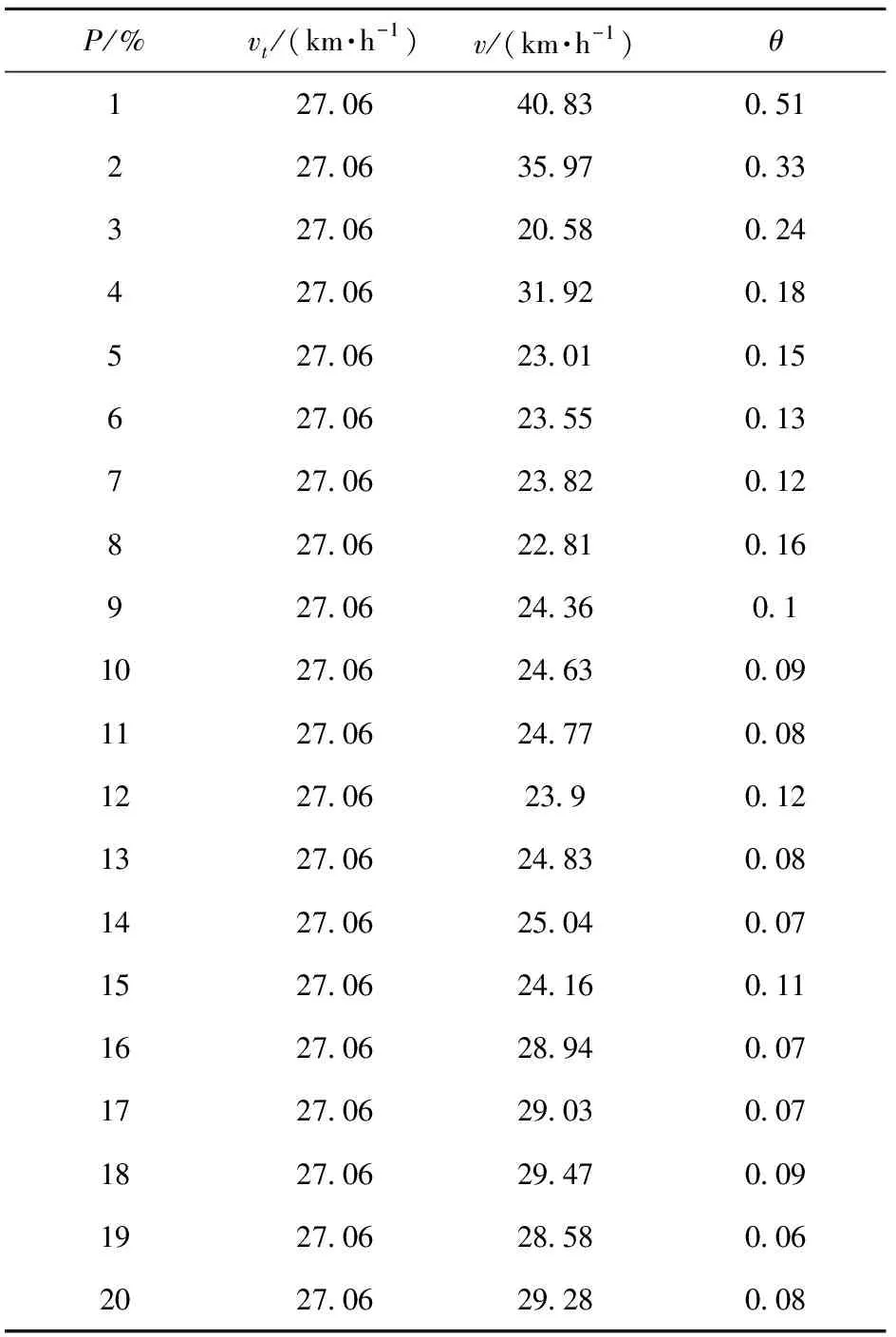
表3 路段L11的浮動車比例與相關參數值對照表
利用數據處理軟件擬合得到全部路段的浮動車比例與相對誤差關系函數F(P)如圖7所示。
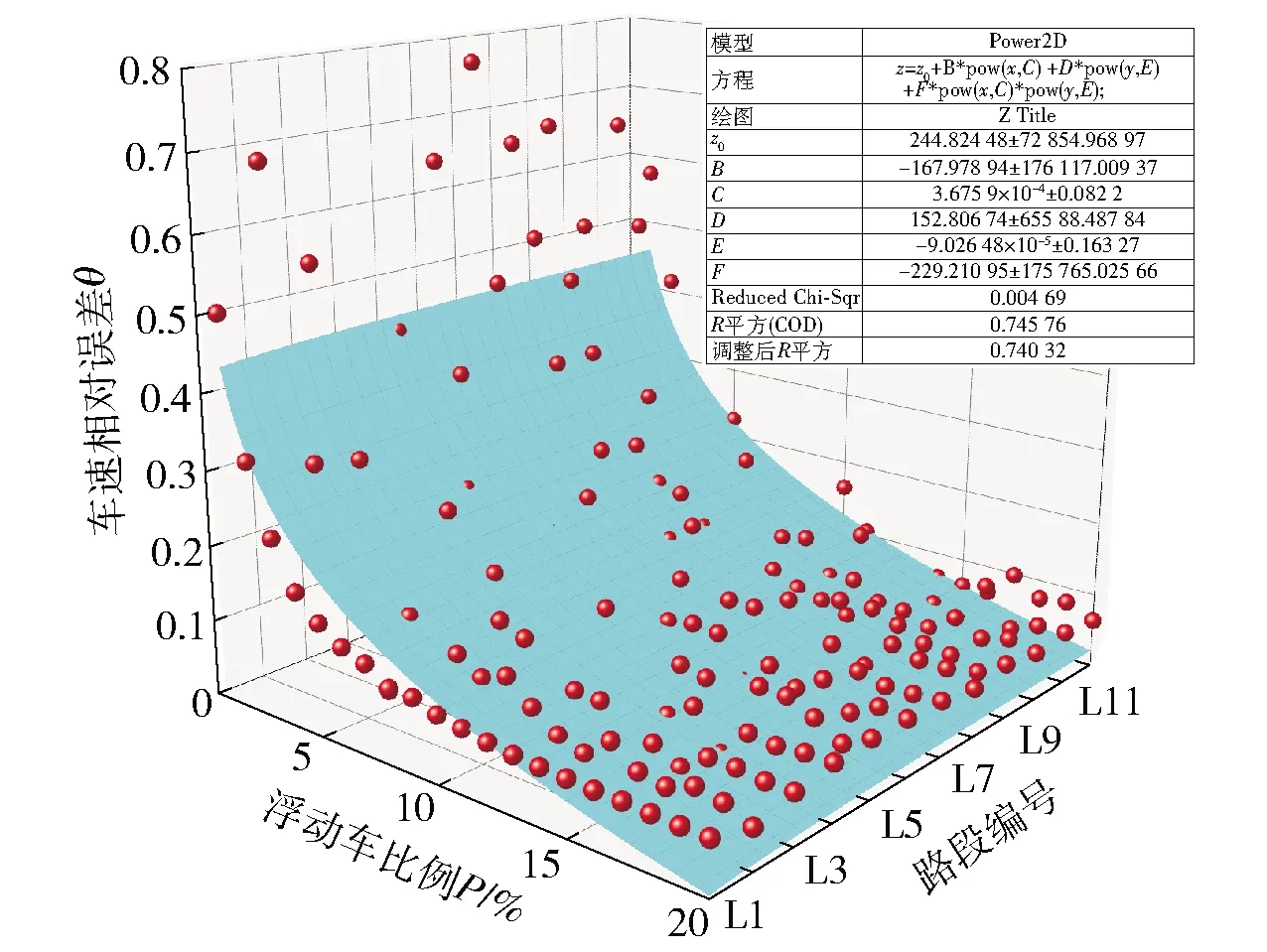
圖7 浮動車比例與車速相對誤差關系圖Fig.7 Diagram of floating vehicle proportion and relative error of speed
通過對圖7中所有路段的浮動車比例與車速相對誤差之間的關系進行分析得到:
1)隨著浮動車比例的增大,各路段間的車速相對誤差都有明顯減少,且各路段的車速相對誤差在較高的浮動車比例下逐漸趨于相同,反映出浮動車比例在較低水平下的增加對減少車速相對誤差作用顯著;而當浮動車比例在較高水平下時,浮動車比例的增加對減少車速相對誤差的作用明顯減弱,證明了選取恰當浮動車比例的必要性。
2)所有路段的浮動車比例與車速相對誤差在空間上的分布關系可以用冪函數曲面較好地擬合,其擬合結果如圖7所示。
3)觀察圖7及其冪函數可以發現,對本文的仿真實驗而言,當浮動車比例不小于5%時,車速相對誤差可以到達一個較低的水平,浮動車的計算車速與路段真實平均車速相差不超過5 km/h,參數精度可以滿足使用要求,因此可選定5%為浮動車比例取值的下界;而當浮動車比例大于8%時,車速相對誤差的變化與浮動車比例的增加表現為弱關系,從節約成本的角度考慮,可選定8%為浮動車比例取值的上界。綜上所述,對案例路網而言浮動車比例的取值為5%~8%。
4 模型對比
為檢測本文所提模型的效果,在路段設置條件相同且浮動車比例取值為5%~8%的情況下,與其他浮動車比例取值方法進行誤差比對[6]。
模型一為基于路網覆蓋率的方法,根據式(14)與流速密的關系計算,可得到對比模型一的車速相對誤差。
(14)
式中:E1為模型一的浮動車在全路網的覆蓋率;α為浮動車在全路網中的占比;ρi為路段i上的平均交通流密度,單位為veh/km;L為路段平均長度,單位為km;Nr為路網總體車輛數目,單位為veh;Mi為第i種類型路段的數量。
模型二為基于浮動車分布的方法,根據式(15)和本文設定的浮動車比例,可得到模型二的車速相對誤差。
(15)
式中:E2為模型二的浮動車在全路網的覆蓋率;Nfi為浮動車在道路等級為i的路網中覆蓋的路段數;Nfij為浮動車j穿行的路段數;vi為浮動車j在計算時間內在道路等級為i路段上的行駛速度,單位為km/h;T為浮動車數據系統的計算間隔,單位為h;Li為路段的平均長度,單位為km;αi為采樣因子;Qfi為i路段上處于在線狀態的浮動車數量,單位為veh。假定車輛穿行部分路段等同于完整駛過,需附加系數彌補理論假設導致的偏小值(0.7)。
3種模型車速相對誤差對比如圖8所示,在仿真得到的浮動車比例P的情況下,基于路網覆蓋模型略優于基于浮動車分布模型,本模型的車速相對誤差最低且波動幅度較小。在準確確定路網浮動車比例的前提下,基于TransModeler仿真的精度更優。
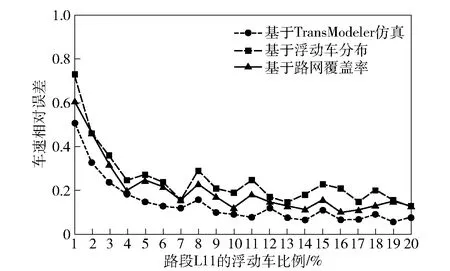
圖8 3種模型的路段L11車速相對誤差對比Fig.8 Comparison of the relative error of the L11 vehicle speed of the road sections of the three models
5 結論
為建立適用于大型路網下滿足覆蓋率以及高精度要求的浮動車比例選取方法,本文開展基于TransModeler仿真的浮動車比例取值方法研究,包括確定浮動車檢測數據評價指標與建立浮動車比例取值方法。本模型基于浮動車比例取值的方法綜合考慮了所得浮動車數據的精確性與數據獲取成本,從數值分析結果來看,對案例路網而言浮動車的取值比例應在5%~8%為最佳。本文所建立的方法可以獲取大型路網交通流運行狀況,為智能交通系統提供高精度的數據支撐。在相同條件下與其他模型相比,本模型的車速相對誤差最小。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
