便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)精度分析
2021-09-29 02:25:14高志奇周世峰乞耀龍譚維賢黃平平
信號處理 2021年9期
關(guān)鍵詞:實(shí)驗(yàn)系統(tǒng)
高志奇 周世峰 劉 勇 乞耀龍 譚維賢 黃平平
(1. 內(nèi)蒙古工業(yè)大學(xué)信息工程學(xué)院, 內(nèi)蒙古呼和浩特 010051; 2. 內(nèi)蒙古自治區(qū)雷達(dá)技術(shù)與應(yīng)用重點(diǎn)實(shí)驗(yàn)室, 內(nèi)蒙古呼和浩特 010051; 3. 中鐵二院工程集團(tuán)有限責(zé)任公司, 四川成都 610031)
1 引言
微變監(jiān)測雷達(dá)由于其工作平臺在地面上,可以在目標(biāo)區(qū)域外幾十米甚至幾公里處進(jìn)行觀測,有利于靈活地選擇布設(shè)地點(diǎn)和觀測視角,且工作在微波波段,成像時不受天氣條件的影響,具有全天時全天候的優(yōu)點(diǎn)[1- 4]。按照合成孔徑(Synthetic Aperture Radar, SAR)的使用方式,在SAR成像模式下,目前廣泛應(yīng)用的有兩種類型,即直線掃描式地基SAR和弧線掃描式地基SAR[5-6],直線掃描地基SAR是通過合成孔徑雷達(dá)技術(shù),在方位向采用高精度直線軌道運(yùn)動形成合成孔徑,利用脈沖壓縮實(shí)現(xiàn)距離向高分辨率,從而獲取目標(biāo)區(qū)域的高分辨率圖像。具有代表性的有IBIS-FM系統(tǒng)[7],LiSA系統(tǒng)[8]、FastGBSAR-S系統(tǒng)[9]、RiskSAR系統(tǒng)[10]、S-SAR系統(tǒng)[11]、邊坡形變監(jiān)測系統(tǒng)[12-13]、微變監(jiān)測雷達(dá)LSA系統(tǒng)[14]等;弧線掃描地基SAR是通過旋轉(zhuǎn)云臺帶動收發(fā)天線進(jìn)行全方位圓弧掃描,從而形成大的合成孔徑,與直線掃描SAR相比,成像算法有所不同[15]。弧線掃描式地基SAR代表的有ArcSAR(Arc-scanning SAR)[16]、IBIS-ArcSAR系統(tǒng)[17]、Arc FMCW-SAR系統(tǒng)[18]和微變監(jiān)測雷達(dá)RSA系統(tǒng)[19]、便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)等。
很多專家學(xué)者對上述地基微變監(jiān)測雷達(dá)系統(tǒng)進(jìn)行了精度驗(yàn)證與分析,如邢誠、徐亞明等對IBIS-S 系統(tǒng)設(shè)計(jì)了相應(yīng)的精度檢測方案,實(shí)驗(yàn)表明,IBIS-S 系統(tǒng)可以實(shí)現(xiàn)高精度的建筑物、橋梁等目標(biāo)物的微變形監(jiān)測[20];曹佰松對北京理工雷科生產(chǎn)的地基InSAR系統(tǒng)進(jìn)行精度驗(yàn)證,實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)測量精度能達(dá)到0.1 mm,空間分辨率中方位向分辨率能達(dá)到3.53 mrad,距離向分辨能達(dá)到0.23 m,可實(shí)現(xiàn)高精度的目標(biāo)微變形監(jiān)測應(yīng)用[21]。周呂、郭際明等對IBIS-L系統(tǒng)完成了基于二維形變場的精度驗(yàn)證與分析,實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)可以實(shí)現(xiàn)小區(qū)域性的亞毫米級形變探測[22]。曲世勃、王彥平等基于ASTRO系統(tǒng)分析了影響形變監(jiān)測精度的主要誤差源,驗(yàn)證了 ASTRO 系統(tǒng)用于形變監(jiān)測的能力[23]。
目前形變精度驗(yàn)證研究多針對直線掃描款式,對弧線掃描款式相應(yīng)研究還較少,本文基于內(nèi)蒙古工業(yè)大學(xué)研制的便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)進(jìn)行精度測試分析,同現(xiàn)有的IBIS-FM系統(tǒng)、LiSA系統(tǒng)、FastGBSAR-S系統(tǒng)、LSA系統(tǒng)等直線掃描微變監(jiān)測雷達(dá)系統(tǒng)相比,該系統(tǒng)可以擴(kuò)大觀測角度范圍,提高系統(tǒng)監(jiān)測效率,且具有小型化、便攜式的特點(diǎn)。通過設(shè)計(jì)兩組形變監(jiān)測實(shí)驗(yàn),分別對一維形變監(jiān)測精度和二維形變監(jiān)測精度進(jìn)行了驗(yàn)證與分析,通過實(shí)驗(yàn),驗(yàn)證了便攜式全方位微變監(jiān)測雷達(dá)的形變監(jiān)測能力。
2 微變監(jiān)測雷達(dá)形變監(jiān)測模型
微變監(jiān)測雷達(dá)有合成孔徑(SAR)和實(shí)孔徑(Real Aperture Radar, RAR)兩種工作模式。在實(shí)孔徑工作模式下,雷達(dá)不動,僅測量天線指向方向的一維形變;在合成孔徑工作模式下,雷達(dá)需要對觀測區(qū)域成像,然后根據(jù)觀測目標(biāo)在視線(Line of Sight, LoS)向的形變,計(jì)算目標(biāo)在平面內(nèi)的形變[23]。兩種工作模式的監(jiān)測原理有所不同。
2.1 一維形變監(jiān)測模型
便攜式全方位微變監(jiān)測雷達(dá)采用連續(xù)波體制,發(fā)射信號為步進(jìn)頻連續(xù)波信號,發(fā)射信號St(t)的表達(dá)式為:
(1)
fm=f0+mΔf
(2)
令場景中目標(biāo)P回波信號與本振信號做混頻處理后的信號Sif(m)為[24]:
(3)
式中,σP為目標(biāo)的散射系數(shù),R為點(diǎn)目標(biāo)與雷達(dá)的距離;距離信息的獲取是通過將混頻處理后的信號Sif(m)進(jìn)行逆傅里葉變換來實(shí)現(xiàn):

(4)
式中,N表示采樣的點(diǎn)數(shù);n為離散采樣點(diǎn)變量,其取值范圍為n=[1,2,…,N],相位φ的表達(dá)式為:
(5)

(6)
(7)
2.2 二維形變監(jiān)測模型
在實(shí)際監(jiān)測環(huán)境中,監(jiān)測點(diǎn)位置發(fā)生變化時,其可能不只在雷達(dá)視線方向發(fā)生形變,也可能在其他方向發(fā)生形變位移。因此,上節(jié)所述一維形變監(jiān)測模型并不適合在復(fù)雜環(huán)境中復(fù)雜目標(biāo)的監(jiān)測,如變化狀況復(fù)雜的滑坡或露天礦等[25]。設(shè)兩次觀測中,雷達(dá)到任意一點(diǎn)目標(biāo)P的距離變化為ΔR=R1-R2,該變化與兩幅圖像的干涉相位成比例關(guān)系,可以通過干涉相位提取形變信息。
假設(shè)大氣在兩次回波中沒有變化,則雷達(dá)獲得的目標(biāo)回波可以表示為[26]:
(8)
其中,σp為目標(biāo)的散射系數(shù),當(dāng)R不同時,回波的幅度值與σp成正比,與R成反比。對目標(biāo)P進(jìn)行前后兩次觀測,觀測前后的斜距分別為R1和R2,則其兩次回波分別為:
(9)
(10)
將兩次雷達(dá)回波進(jìn)行復(fù)共軛相乘,并提取其相位即為干涉測量相位,如式(12)所示:
(11)
(12)
與其相應(yīng)的雷達(dá)視線向形變即為:
(13)
3 微變監(jiān)測雷達(dá)精度影響因素分析
由第2節(jié)分析可知,提取的干涉相位可直接用于計(jì)算雷達(dá)LoS向形變,但在精度測試過程中,諸多因素可能會對解算LoS向形變造成影響,進(jìn)而影響測試精度。本文主要針對被測目標(biāo)的布局設(shè)置和隨監(jiān)測距離不同信噪比的變化兩種情況,分析可能對測試精度造成的影響。
3.1 觀測目標(biāo)布局對精度的影響
當(dāng)雷達(dá)與被測目標(biāo)距離較遠(yuǎn)時,兩次雷達(dá)波近似平行,如圖2所示。圖中r為實(shí)際發(fā)生的形變,R1、R2為形變前后的斜距長度,θ角為滑坡方向位移與LoS向位移之間的映射角。由斜距近似平行假設(shè)幾何關(guān)系可將LoS向位移的解算表達(dá)為式(14),LoS向位移計(jì)算與角度θ有關(guān)。
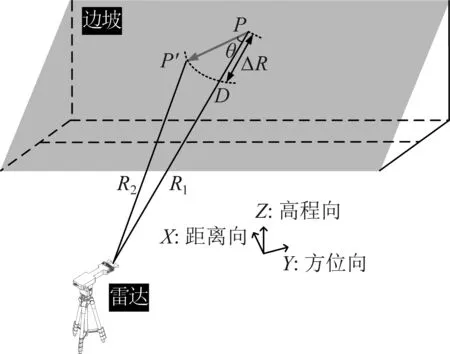
圖1 微變監(jiān)測雷達(dá)形變提取原理圖Fig.1 Schematic diagram of Micro Deformation Monitoring radar deformation extraction
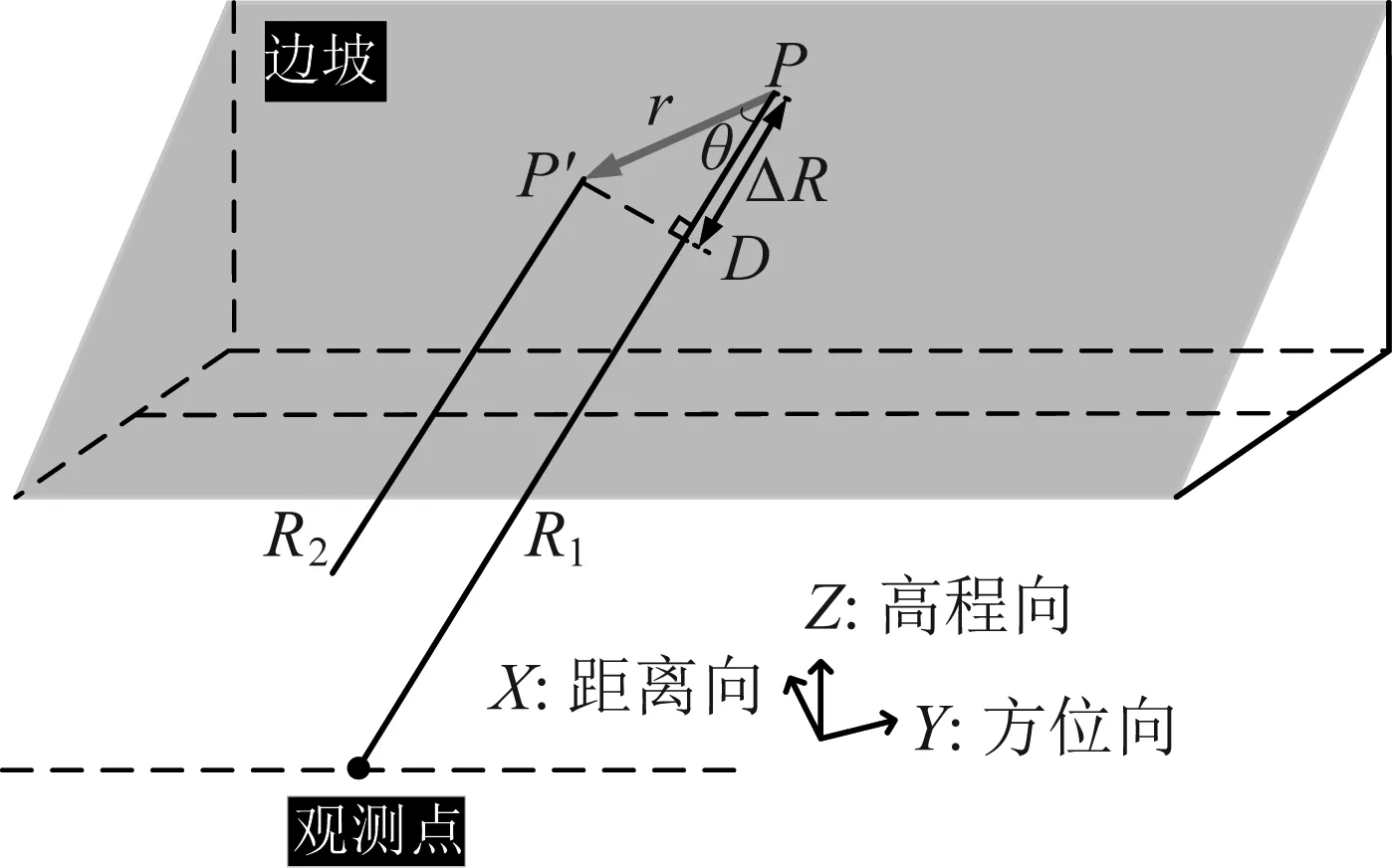
圖2 形變監(jiān)測幾何模型Fig.2 Deformation monitoring geometric model
ΔR=r·cosθ
(14)
根據(jù)圖1形變提取原理可知,雷達(dá)到觀測區(qū)域內(nèi)任意一點(diǎn)P的LoS向位移ΔR=R1-R2,利用余弦定理可以得到LoS向位移與滑坡方向的關(guān)系如式(15)所示[23],求解方程可得LoS向位移表達(dá)式為式(16)所示,LoS向位移與斜距R1、映射角θ、干涉相位φ有關(guān)。
(15)
(16)
LoS向位移解算根據(jù)映射角θ大小作相應(yīng)變化,式中θ∈(0°,90°)時取正號,θ∈(90°,180°)時取負(fù)號,當(dāng)映射角θ為0時,LoS向位移ΔR即為滑坡方向位移r,當(dāng)映射角θ接近90°時,雷達(dá)幾乎失去監(jiān)測能力,因此在測試精度過程中對觀測目標(biāo)進(jìn)行布局時,考慮獲取被測目標(biāo)足夠的散射特性的同時,雷達(dá)視線與被測目標(biāo)的夾角應(yīng)盡量小。
3.2 SNR對精度的影響
一般雷達(dá),若具有相干匹配的收發(fā)系統(tǒng),其信噪比方程為[27]:
(17)

進(jìn)一步考慮系統(tǒng)分辨率以及目標(biāo)雷達(dá)截面積,便攜式全方位雷達(dá)系統(tǒng)的距離向和方位向的分辨率分別為ρr和ρa(bǔ),則:
(18)
式中,σ0為地面后向散射系數(shù),β為目標(biāo)到天線的連線與旋轉(zhuǎn)平面之間的夾角,ρy=ρr/cosβ為距離向分辨單元長度,具體幾何模型如文獻(xiàn)[18]中所述,其中ρa(bǔ)可表示為[18]:
(19)
式中,ω為旋轉(zhuǎn)系統(tǒng)的角速度(rad/s),L為旋轉(zhuǎn)半徑,θB為方位角波束寬度,Ba為多普勒帶寬,Ba具體可表示為:
(20)
式(17)可以重寫為:
(21)
其中,NR表示單次脈沖收發(fā)次數(shù),Tr為脈沖持續(xù)時間,其他符號意義與式(17)相同,要提高系統(tǒng)的整體性能,需要增加系統(tǒng)發(fā)射脈沖次數(shù)和脈沖信號持續(xù)時間。實(shí)際中,脈沖的收發(fā)次數(shù)取決于方位向多普勒帶寬,需滿足奈奎斯特采樣定理:
(22)
式中,θd為旋轉(zhuǎn)角度間隔,Tk為系統(tǒng)旋轉(zhuǎn)采樣一周所需的時間。因此,在便攜式全方位雷達(dá)成像系統(tǒng)性能評估中,各系統(tǒng)的參數(shù)設(shè)計(jì)均會影響到系統(tǒng)的整體性能,需要綜合權(quán)衡。

表1 系統(tǒng)性能分析參數(shù)設(shè)置
如圖3中,在RCS不同的情況下,分別是在,σ=0 dBsm,σ=-10 dBsm,σ=-20 dBsm得到的探測距離與SNR的關(guān)系;圖4中,發(fā)射功率分別是Pt=30 dBm,Pt=20 dBm,Pt=10 dBm得到探測距離與SNR的關(guān)系。從圖中可以看出,隨著距離的增加,信噪比逐漸下降,會對形變監(jiān)測精度造成一定的影響。但按照實(shí)際的系統(tǒng)參數(shù)設(shè)置,系統(tǒng)在5 km處SNR仍在3 dB以上。因此,該系統(tǒng)可保證5 km以內(nèi)的監(jiān)測精度。

圖3 RCS不同,SNR相對距離曲線Fig.3 Different RCS, SNR relative distance curve
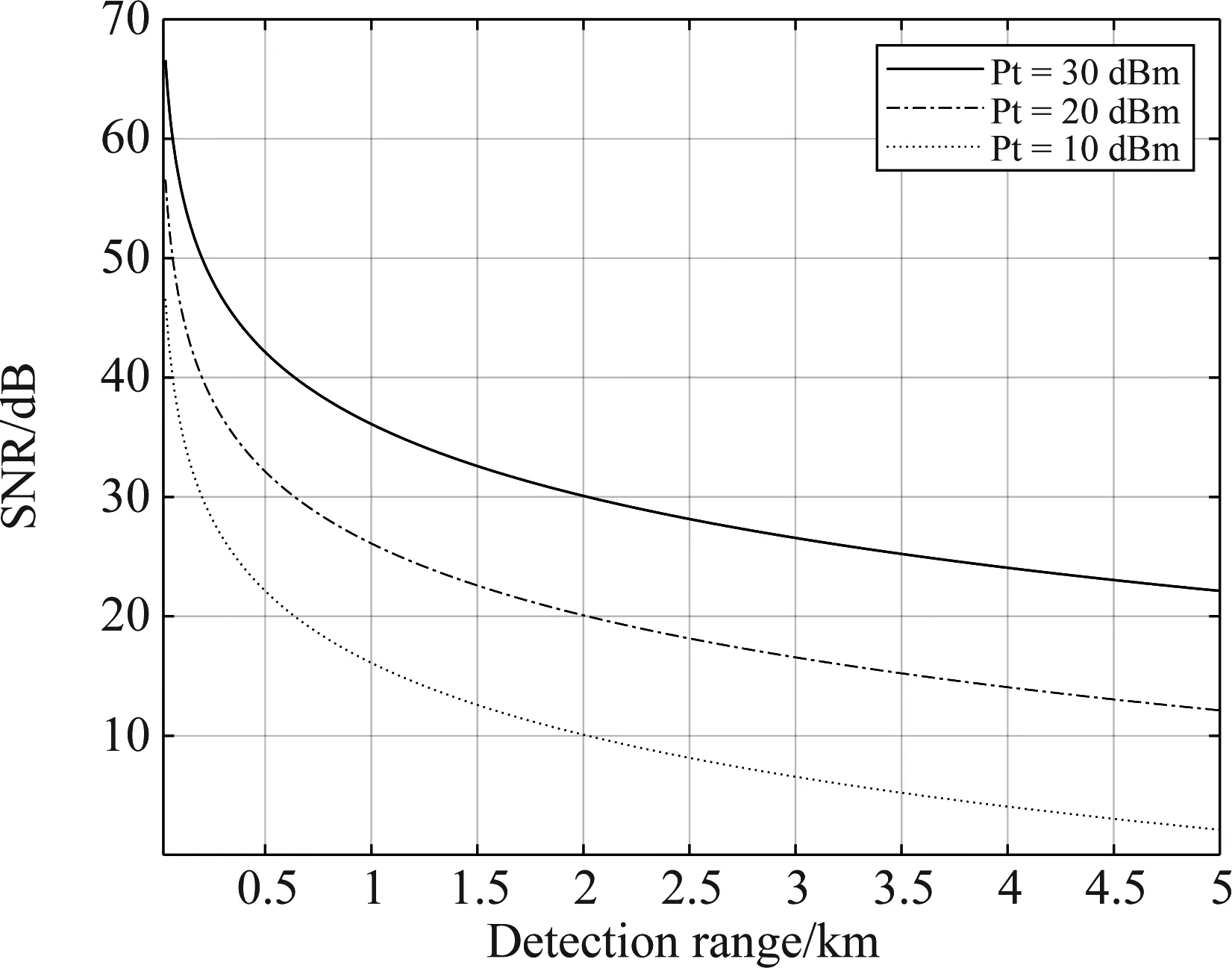
圖4 發(fā)射功率不同,SNR相對距離曲線Fig.4 Different transmit power, SNR relative distance curve
4 微變監(jiān)測雷達(dá)精度驗(yàn)證方案
基于前述干涉測量原理和微變監(jiān)測雷達(dá)系統(tǒng)基本工作原理,確定本試驗(yàn)方案。精度驗(yàn)證實(shí)驗(yàn)從兩個方面開展:一是以角反射器為實(shí)驗(yàn)?zāi)繕?biāo)開展一維形變監(jiān)測驗(yàn)證分析;二是以分布式角反射器模擬觀測場景,開展二維形變監(jiān)測進(jìn)行精度驗(yàn)證分析。
4.1 便攜式全方位系統(tǒng)基本工作原理
本文采用便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)為精度測試實(shí)驗(yàn)平臺。該系統(tǒng)使用二維高精度轉(zhuǎn)臺攜帶天線,通過距離壓縮實(shí)現(xiàn)距離向分辨,通過方位機(jī)械掃描實(shí)現(xiàn)方位向分辨,進(jìn)而實(shí)現(xiàn)對觀測區(qū)域的全方位成像觀測與形變監(jiān)測。便攜式全方位系統(tǒng)主要包括雷達(dá)收發(fā)分系統(tǒng)、天線分系統(tǒng)、數(shù)字云臺分系統(tǒng)以及主控系統(tǒng)等,如圖5所示。
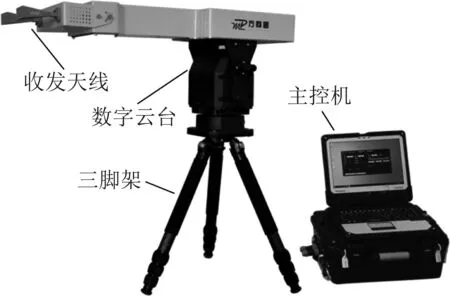
圖5 便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)Fig.5 Portable omni-directional scanning Micro Deformation Monitoring radar system
便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)可實(shí)現(xiàn)0°~360°全方位的監(jiān)測范圍覆蓋,系統(tǒng)通過計(jì)算機(jī)對各個分系統(tǒng)進(jìn)行控制,根據(jù)實(shí)驗(yàn)需求可對相關(guān)參數(shù)進(jìn)行設(shè)定,進(jìn)而實(shí)現(xiàn)近實(shí)時采集觀測目標(biāo)場景幅度、相位等信息。微變監(jiān)測雷達(dá)反演形變信息的質(zhì)量通常取決于干涉相位的質(zhì)量,如果圖像在獲取數(shù)據(jù)的期間,觀測目標(biāo)特性沒有大的變化,即后向散射特性沒有變化,我們就可以忽略它對相位的影響,從而通過時序測量的SAR圖像得到干涉圖像。
4.2 一維形變監(jiān)測實(shí)驗(yàn)
本實(shí)驗(yàn)布設(shè)于室外場地,實(shí)驗(yàn)中采取手動移動角反射器的方式,為保證移動精度,將棱鏡與角反射器剛性連接,使用全站儀對實(shí)際移動距離進(jìn)行測量。實(shí)驗(yàn)中布設(shè)A、B、C三個三面角反射器作為觀測目標(biāo),角反射器的發(fā)射面中心法向位于雷達(dá)視線范圍內(nèi)。
第一組實(shí)驗(yàn)只移動B角反射器,驗(yàn)證其在多個目標(biāo)下的位移精度;第二組實(shí)驗(yàn)同時移動A、B角反射器,驗(yàn)證其位移方向和雷達(dá)的關(guān)系。各角反射器的布置情況如圖6所示。實(shí)驗(yàn)中便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)參數(shù)如表2所示。
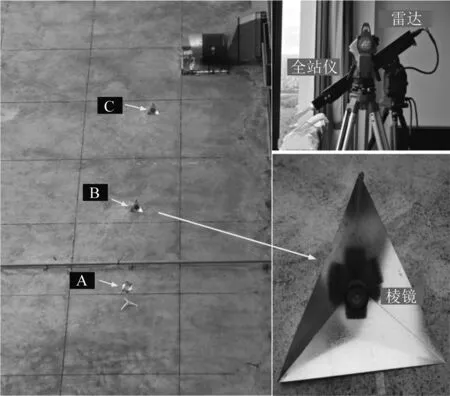
圖6 角反射器布置情況Fig.6 Layout of corner reflector
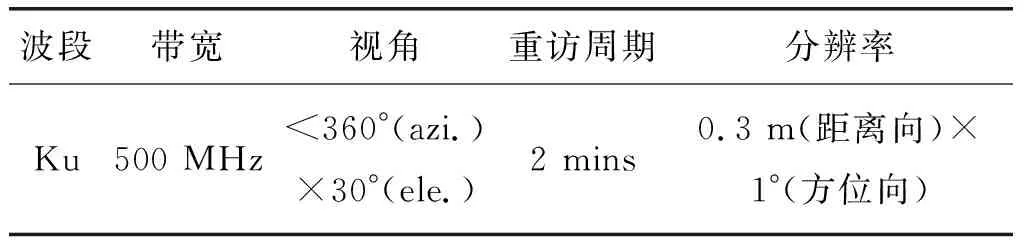
表2 便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)參數(shù)
觀測區(qū)域目標(biāo)的一維距離像如圖7所示,角反射器目標(biāo)反射較強(qiáng),可以清晰看到目標(biāo)的距離和散射強(qiáng)度信息。
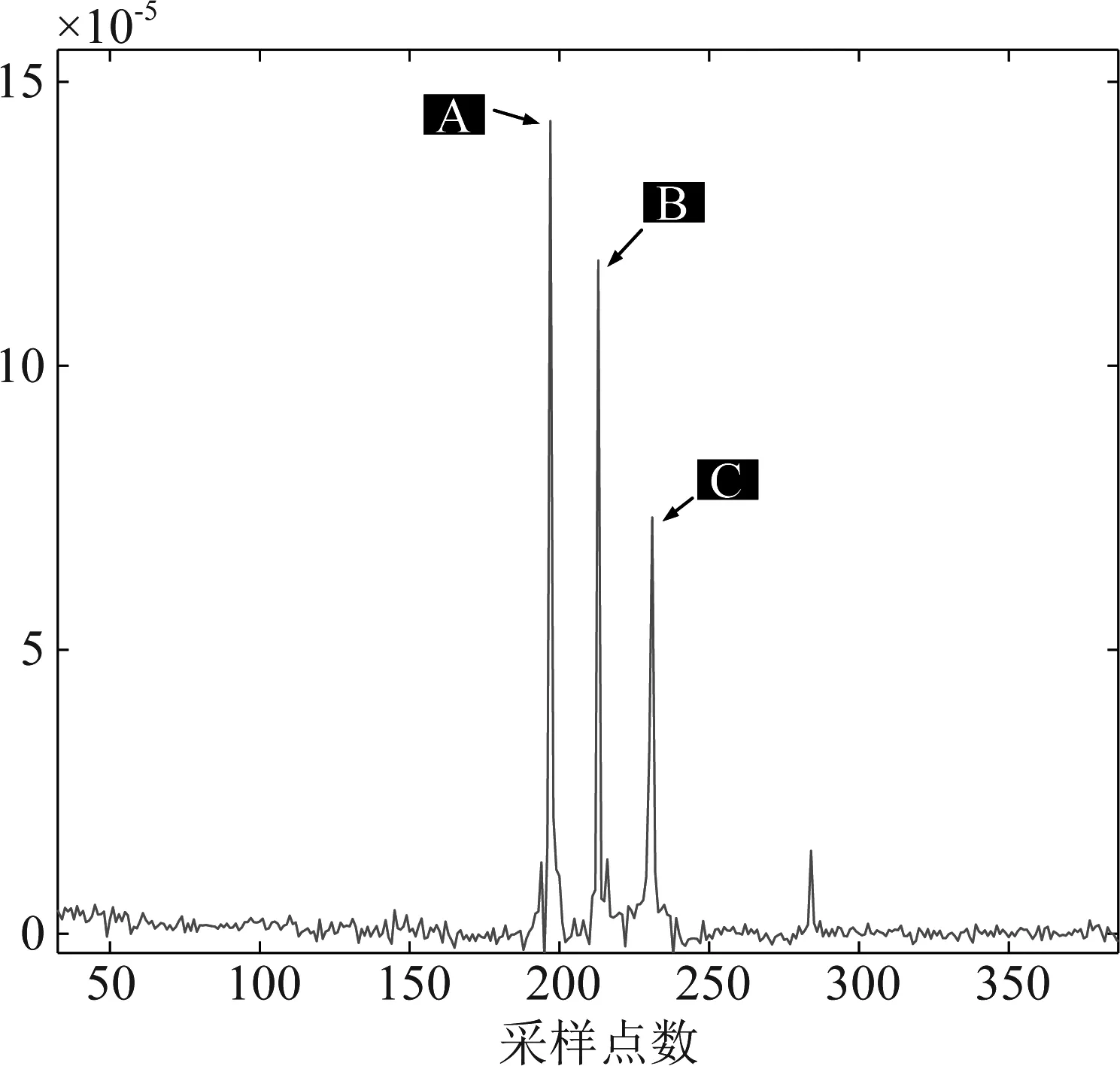
圖7 一維距離像Fig.7 One-dimensional distance profile
4.2.1實(shí)驗(yàn)1單目標(biāo)位移
本組實(shí)驗(yàn)只對B角反射器沿靠近雷達(dá)方向移動,每次移動2 mm,由于采取手動移動角反射器的方式,故最終以全站儀實(shí)測數(shù)據(jù)為準(zhǔn),其中A、C角反射器作為穩(wěn)定目標(biāo)監(jiān)測點(diǎn)。表3為對B角反射器進(jìn)行毫米級調(diào)節(jié)時,微變監(jiān)測雷達(dá)系統(tǒng)的監(jiān)測值與全站儀測量結(jié)果對比結(jié)果。圖8為A、C角反射器的雷達(dá)監(jiān)測數(shù)值。
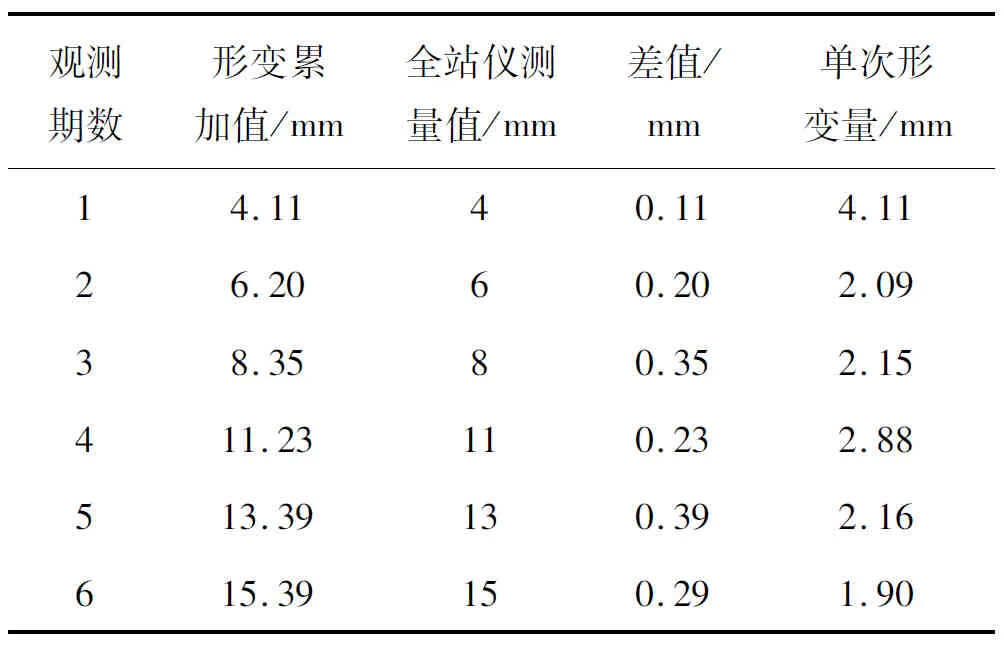
表3 B角反射器形變位移與全站儀測量值對比
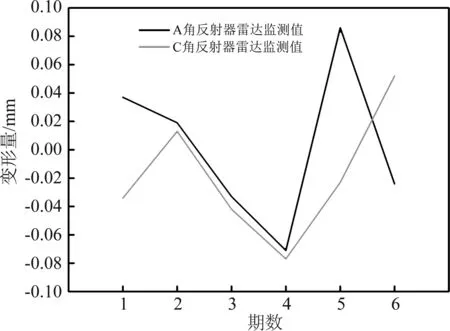
圖8 A、C角反射器雷達(dá)監(jiān)測值Fig.8 A, C corner reflector radar monitoring value
4.2.2實(shí)驗(yàn)2多目標(biāo)位移
本組實(shí)驗(yàn)對A、B角反射器同時進(jìn)行移動,C角反射器作為穩(wěn)定目標(biāo)監(jiān)測點(diǎn)。其中將A角反射器沿靠近雷達(dá)視線方向移動,B角反射器沿遠(yuǎn)離雷達(dá)視線方向移動;每次移動2 mm,共移動4次。得到的位移數(shù)值正值代表靠近雷達(dá)視線方向,負(fù)值代表遠(yuǎn)離雷達(dá)視線方向。表4分別為A、B角反射器雷達(dá)監(jiān)測值與全站儀測量值結(jié)果對比,圖9為C角反射器雷達(dá)監(jiān)測數(shù)值。
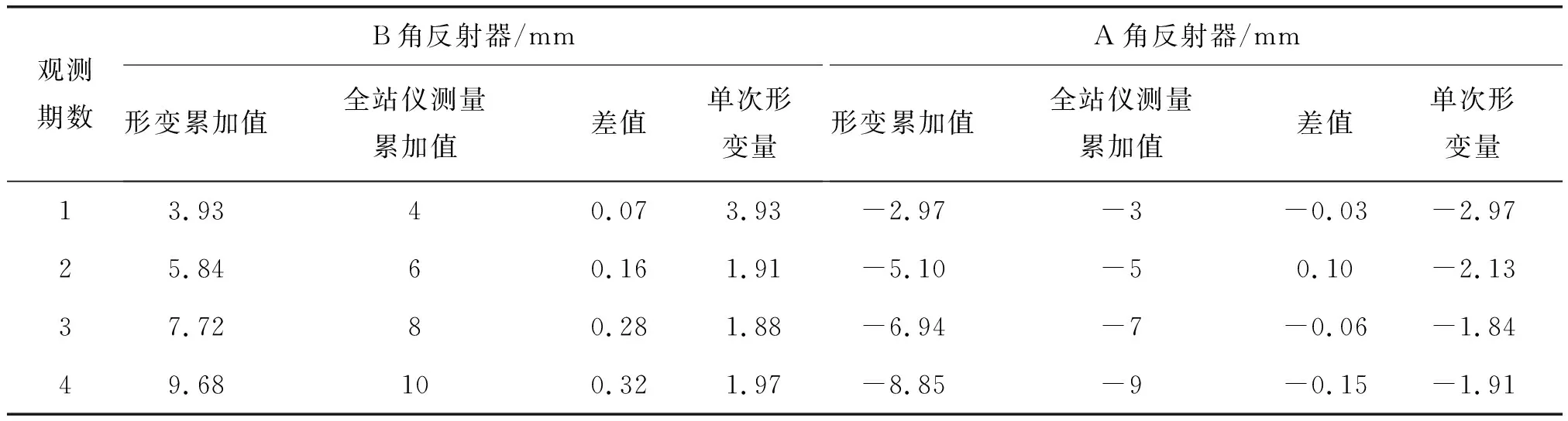
表4 A、B角反射器形變位移與全站儀測量值對比
4.2.3結(jié)果分析
通過對點(diǎn)目標(biāo)一維圖像分析,確定系統(tǒng)控制軟件正確設(shè)置了參數(shù)并協(xié)調(diào)各分系統(tǒng)同步工作。通過比較表2中B角反射器的雷達(dá)監(jiān)測值與全站儀測量值可以發(fā)現(xiàn),其形變趨勢與實(shí)際移動情況吻合,總體測量精度保持在亞毫米級,單次測量誤差均值為0.12 mm,均方根誤差為0.12;設(shè)置的穩(wěn)定參考角反射器A、C,測量均值分別為0.05 mm和0.04 mm,在0.1 mm之內(nèi)。比較同時移動A、B角反射器的監(jiān)測情況可以看出,其形變趨勢與設(shè)計(jì)的實(shí)際移動值吻合情況較好,需要注意的是,表中給出的差值為累積誤差,查看A、B角反射器的單次測量誤差均值分別為0.08 mm和0.10 mm,均方根誤差為0.08;設(shè)計(jì)的參考角反射器C,其測量均值為0.03 mm,在0.1 mm之內(nèi)。在實(shí)驗(yàn)1和實(shí)驗(yàn)2中,設(shè)置的固定角反射器雖然測量均值都在0.1 mm之內(nèi),但在監(jiān)測期間實(shí)際并無位移發(fā)生,分析其主要原因可能為系統(tǒng)噪聲、隨機(jī)噪聲等誤差源并未完全消除所致;再者,由于本文最終測量結(jié)果是與全站儀測量結(jié)果進(jìn)行對比,在進(jìn)行單目標(biāo)位移和多目標(biāo)位移時,不排除由全站儀本身的誤差對實(shí)驗(yàn)結(jié)果造成影響。但總體來說,實(shí)驗(yàn)結(jié)果與實(shí)際情況吻合較好,便攜式全方位微變監(jiān)測雷達(dá)的一維形變監(jiān)測精度可達(dá)亞毫米級。
4.3 二維形變監(jiān)測實(shí)驗(yàn)
本次實(shí)驗(yàn)設(shè)置五個角反射器,實(shí)驗(yàn)場景依舊選擇在室外環(huán)境中進(jìn)行,使用精度滑臺進(jìn)行手鼓轉(zhuǎn)動調(diào)節(jié)角反射器的位移量,手動滑臺設(shè)定了手鼓標(biāo)尺,移動精度優(yōu)于0.025 mm,滿足實(shí)驗(yàn)要求。角反射器固定在精度滑臺上,其發(fā)射面中心法向位于雷達(dá)視線范圍內(nèi)。
實(shí)驗(yàn)分為兩組,為保證解算形變值的準(zhǔn)確性,設(shè)置多個穩(wěn)定角反射器作為參考目標(biāo)。第一組實(shí)驗(yàn)角反射器B為監(jiān)測目標(biāo),以角反射器A、C、D、E為參考目標(biāo)。將B角反射器沿靠近雷達(dá)視線方向移動;第二組實(shí)驗(yàn)角反射器A、B為監(jiān)測目標(biāo),角反射器C、D、E為參考目標(biāo)。兩組實(shí)驗(yàn)每移動一次均采集兩景數(shù)據(jù)。各角反射器布置情況如圖10所示。
圖10 角反射器布置情況Fig.10 Layout of corner reflector
觀測期間,數(shù)據(jù)采集間隔為2 min,距離向分辨率為0.3 m,方位向分辨率為1°,實(shí)驗(yàn)中移動的目標(biāo)角反射器距離雷達(dá)約50 m。圖11為實(shí)驗(yàn)監(jiān)測目標(biāo)的雷達(dá)圖像,圖12為實(shí)驗(yàn)場景相干系數(shù)圖像,從兩圖中均可以清晰的看出角反射器的位置。
圖11 角反射器放置區(qū)域目標(biāo)雷達(dá)圖像Fig.11 Radar image of the target in the area where the corner reflector is placed
圖12 角反射器放置區(qū)域相干系數(shù)圖Fig.12 Coherence coefficient diagram of corner reflector placement area
4.3.1實(shí)驗(yàn)1單目標(biāo)位移
本組實(shí)驗(yàn)將B角反射器沿靠近雷達(dá)視線方向進(jìn)行移動,每次移動2 mm,共移動3次,每次采集兩景數(shù)據(jù)。表5為不同時間序列下實(shí)際累加移動距離與雷達(dá)形變累加值的對比情況,圖13角反射器B的形變提取結(jié)果,其他角反射器未見明顯形變監(jiān)測結(jié)果。
表5 B角反射器形變位移與實(shí)際移動值對比
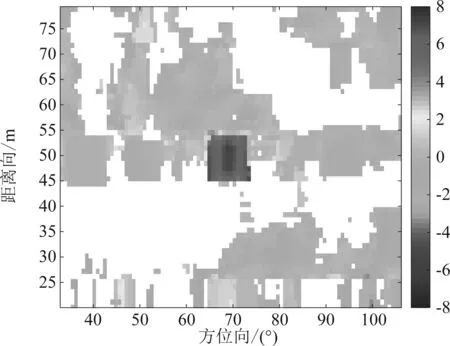
圖13 B角反射器累加形變圖Fig.13 Cumulative deformation map of B corner reflector
4.3.2實(shí)驗(yàn)2多目標(biāo)位移
本組實(shí)驗(yàn)將A、B角反射器分別沿遠(yuǎn)離雷達(dá)視線和靠近雷達(dá)視線方向移動,每次移動1.5 mm,同樣采集兩景數(shù)據(jù),表6為A、B角反射器的實(shí)際移動距離與雷達(dá)形變累加值對比情況,提取A、B角反射器的形變值如圖14所示。

表6 A、B角反射器形變位移與實(shí)際移動值對比
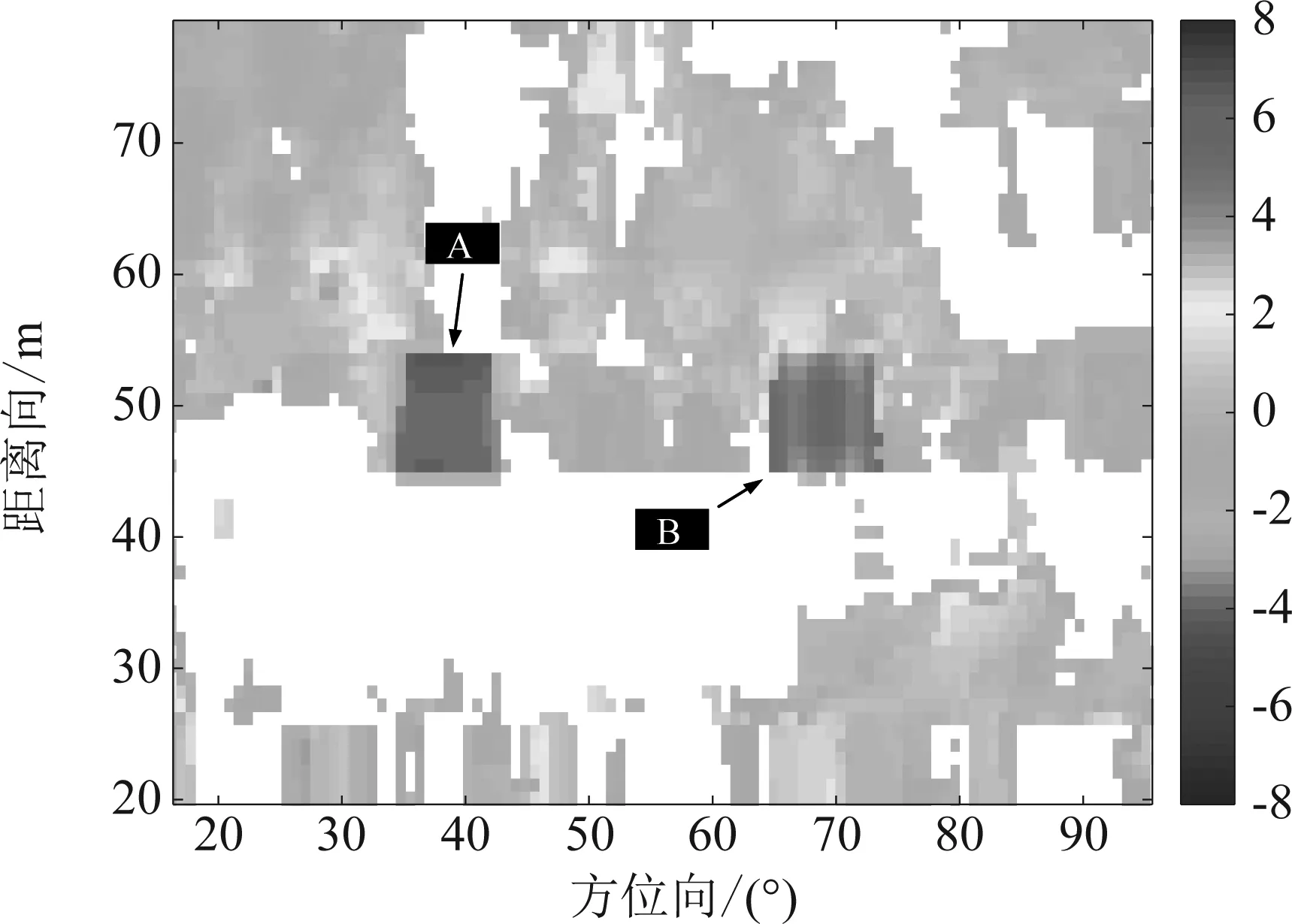
圖14 A、B角反射器累加形變圖Fig.14 Cumulative deformation map of A and B corner reflector
4.3.3結(jié)果分析
分析形變測量結(jié)果與實(shí)際移動移動距離對比結(jié)果可以發(fā)現(xiàn),總體上雷達(dá)形變位移值與設(shè)定的實(shí)際移動距離吻合性較好,且設(shè)定的穩(wěn)定目標(biāo)在監(jiān)測期間也無明顯形變產(chǎn)生。實(shí)驗(yàn)1只移動B角反射器,雷達(dá)形變位移值與實(shí)際移動距離差值最大值與最小值分別為0.16 mm和0.04 mm,均方根誤差為0.11 mm,累積誤差為0.17 mm,由此驗(yàn)證了在多個觀測目標(biāo)下,單目標(biāo)發(fā)生位移的形變監(jiān)測精度;實(shí)驗(yàn)2同時移動A、B角反射器,其雷達(dá)形變值與實(shí)際移動距離最大差值分別為0.14 mm和0.18 mm,最小差值分別為0.02 mm和0.11 mm,均方根分別為0.09 mm和0.14 mm,累積誤差分別為-0.24 mm和0.18 mm,從圖14累加形變圖可以看出,A、B角反射器的形變監(jiān)測值與設(shè)定的形變趨勢方向一致,由此驗(yàn)證了在多目標(biāo)同時發(fā)生形變時,位移方向與雷達(dá)的關(guān)系。理論上實(shí)際移動距離與所測形變值應(yīng)精確吻合,由3.1節(jié)分析可知,只有在雷達(dá)與被測目標(biāo)保持絕對平行,雷達(dá)測量值即為目標(biāo)實(shí)際移動值,但在實(shí)際測量場景中,很難保證雷達(dá)與被測目標(biāo)保持絕對平行或測算雷達(dá)視線方向與被測目標(biāo)位移方向之間的映射角足夠準(zhǔn)確,由此解算的形變監(jiān)測結(jié)果與實(shí)際移動結(jié)果進(jìn)行對比,可能會導(dǎo)致較小數(shù)量級的偏差。
5 結(jié)論
便攜式全方位微變監(jiān)測雷達(dá)形變監(jiān)測精度往往是實(shí)際應(yīng)用中較為關(guān)心的問題。為此,本文對便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)進(jìn)行精度測試方案設(shè)計(jì)。首先對成像幾何和回波信號進(jìn)行分析,得到一維、二維形變監(jiān)測模型;然后分別通過設(shè)計(jì)一維、二維形變監(jiān)測實(shí)驗(yàn)測試系統(tǒng)監(jiān)測精度。實(shí)驗(yàn)結(jié)果表明,一維、二維形變監(jiān)測實(shí)驗(yàn)中,在多個觀測目標(biāo)中移動單個角反射器,測量精度保持在亞毫米級,沿不同位移方向同時移動兩個角反射器,其形變趨勢與實(shí)際移動情況吻合,驗(yàn)證了便攜式全方位微變監(jiān)測雷達(dá)系統(tǒng)的監(jiān)測性能。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52