基于云計算平臺的光通信狀態識別系統設計
2021-09-29 07:10:44張宇劉珊
微型電腦應用 2021年9期
張宇, 劉珊
(國網山西省電力公司電力科學研究院, 山西 太原 030001)
0 引言
相對于其他通信技術,光通信技術的速度更快,環境的適應能力強,而且抗干擾能力更優[1]。隨著光通信技術的不斷發展和成熟,光通信技術在許多領域得到了廣泛的應用,如信息采集、醫院、軍事等[2-4]。由于光通信在自然環境中,因為其他因素干擾,如非法入侵、信號不穩定、信號干擾等,光通信狀態會發生改變,當干擾超過一定的程度,使得光通信狀態異常,異常狀態會影響光通信系統的數據傳輸,如數據重傳次數增加,數據傳輸時間變長,以及數據傳輸成功率下降等,因此需要對光通信狀態進行高精度識別,根據光通信狀態變化制定相應的措施,提高光通信系統的性能具有十分重要的研究價值[5-7]。
光通信狀態識別是一種模式識別的多分類問題,為了保證光通信狀態長期處于正常狀態,許多學者引入了各種技術對其進行了研究,提出了一些光通信狀態識別方法。最初人們通過一些專門設備對光通信狀態進行檢測和識別,由于是一種人工方法,使得光通信狀態識別可靠性差,光通信狀態識別過程繁瑣,光通信狀態識別效率低,而且光通信狀態識別結果與光通信狀態實際結果有時完全不一樣,無法滿足現代光通信技術的發展要求[8-10]。隨后人們提出基于K近鄰方法的光通信狀態識別技術,通過提取光通信狀態識別特征,采用K近鄰方法建立光通信狀態識別的分類器,識別效果要優于人工方法,但是該方法假設光通信狀態和特征之間是一種固定的線性變化關系,這與實際情況不相符,使得光通信狀態識別誤差較大[11]。最近由于人工神經網絡技術的發展,出現了基于各種人工神經網絡的光通信狀態識別方法,如BP神經網絡、RBF神經網絡等,光通信狀態識別結果要好于K近鄰方法,但是由于人工神經網絡要求光通信狀態信號數據比較大,如果不滿足該條件,那么光通信狀態識別效果差,而且人工神經網絡的學習時間長,影響光通信狀態識別效率[12-13]。
為了解決當前光通信狀態識別存在的問題,有效降低光通信狀態識別誤差,設計了基于云計算平臺的光通信狀態識別方法。采集光通信狀態信號,從信號中提取識別特征,然后通過云計算平臺將多個節點合在一起,每一個節點采用支持向量機擬合特征和光通信狀態類別之間的變化關系,實現光通信狀態識別。測試結果表明,本文方法是一種速度快、正確率高的光通信狀態識別方法,驗證了基于云計算平臺的光通信狀態識別方法的優越性。
1 基于云計算平臺的光通信狀態識別方法
1.1 云計算平臺的工作原理及提取特征
隨著每天數據不斷上升,有的領域的數據呈指數速度上升,進入了大數據時代。傳統數據處理技術采用單機方法,單機的中央處理器(CPU)由于制作工藝以及電子器件尺寸的影響,單機處理速度已經達到了瓶頸,無法大幅度進行提升,這樣難以滿足大數據處理的要求。在大數據背景下,出現了云計算平臺,云計算平臺將多個分散在不同地理位置的節點組合在一起,采用分布式管理技術,得到一個性能優異的大系統,加快數據處理能力。當前云計算平臺主要采用MapReduce進行工作,將一個大任務劃分成不同的片段,采用不同節點同時對不同片段進行處理,減少了大任務的處理時間[14-15],其工作原理如圖1所示。
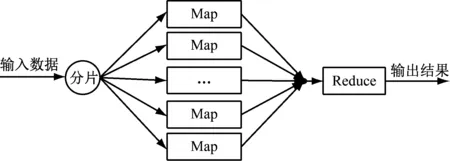
圖1 云計算平臺的工作原理
本文引入云計算平臺,使多個點同時進行光通信狀態識別,加快光通信狀態識別速度。
提取光通信狀態信號識別的特征步驟如下。
Step1: 采用專門工具采集光通信狀態信號。
Step2:采用小波變換對光通信狀態信號進行多尺度分解,得到不同幅度的光通信狀態信號,然后提取第k個幅度的光通信狀態信號的能量值Ek,如式(1)。
(1)
式中,L為分解尺度數;xkm為信號的幅值。
Step3:對能量特征進行歸一化,建立光通信狀態信號擾動信號特征向量t,具體為式(2)。
(2)
1.2 光通信狀態識別的分類器設計及工作步驟
支持向量機和最小二乘支持向量機均屬于數據挖掘技術中的機器學習算法,最小二乘支持向量機的學習速度快,但是其學習精度很低,難以建立高精度的光通信狀態識別分類器,因此本文選擇支持向量機進行光通信狀態識別研究。支持向量機的形式可以描述為式(3)。
yk=ωTφ(xk)+b
(3)
式中,xk表示第k個光通信狀態特征;φ(·)表示擬合函數;b表示偏置向量。
根據支持向量機的學習過程對式(3)進行相應的變換,得到它的等價形式,即式(4)。
(4)
式中,e表示支持向量機的誤差。
為了進一步簡化學習過程,采用拉格朗日乘子αk構建相應的拉格朗日函數,具體為式(5)。
(5)
根據結構風險最小化,根據式(6)—式(9)得到偏置向量b的值。
(6)
(7)
(8)
(9)
由于光通信狀態與特征之間具有一定的非線性,因此引入核函數得到支持向量機的光通信狀態識別結果為式(10)。
(10)
支持向量機引入拉格朗日函數,提高了支持向量機學習效率,為構建光通信狀態識別分類器提供支撐。云計算平臺的光通信狀態識別步驟如下。
Step1:采集光通信狀態識別信號,去掉其中的噪聲。
Step2:對去噪后的光通信狀態信號進行多尺度分解,提取光通信狀態信號特征。
Step3:將光通信狀態信號特征作為支持向量機的輸入,光通信狀態類型作為輸出,通過支持向量機學習,建立光通信狀態信號分類器。
2 光通信狀態識別的具體實例分析
2.1 云計算平臺的設計
要進行測試實驗,需要搭建云計算平臺,本文搭建云計算平臺包括多個節點,一個為中心節點,其他為工作節點,中心節點的任務是管理這些工作節點,使這些工作節點能夠協調工作,不沖突,保證每一個節點的任務均衡,使節點資源得到充分利用,具體描述如表1所示。

表1 云計算平臺節點的相關參數
2.2 光通信狀態信號的來源
為了測試云計算平臺的光通信狀態識別有效性和優越性,選擇最常用的光通信狀態識別方法:BP神經網絡和K近鄰方法在相同的平臺進行對比測試,分別統計光通信狀態識別的正確率,拒識率和誤識率。采集大量的光通信狀態信號作為測試目標,光通信狀態信號可以劃分為多類,正常光通信狀態為一大類,異常的光通信狀態為一大類,異常光通信狀態信號劃細化為4類,具體為:非法入侵狀態,信號中斷狀態,干擾狀態,非法攻擊狀態。其中正常狀態編號為1,4種異常狀態編號為:2—5。不同光通信狀態信號的樣本數量如表2所示。
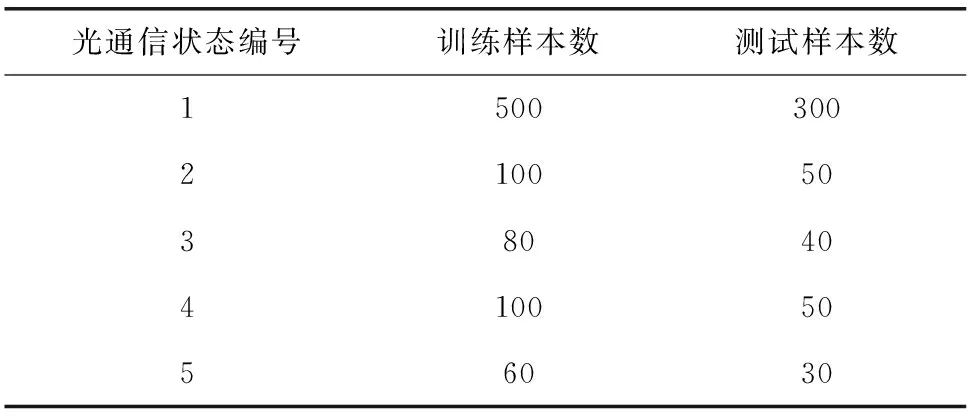
表2 不同光通信狀態信號的樣本數量分布
2.3 光通信狀態識別效果對比
3種方法的光通信狀態效果,如圖2所示。
對圖2的實驗結果進行分析,可知。

圖2 不同方法的光通信狀態識別效果比較
(1)K近鄰算法的實驗結果最差,無法準確區別各種光通信狀態,光通信狀態識別結果與實際值偏差大,無法描述光通信狀態之間的區別,局限性十分明顯,不能應用于實際的光通信狀態管理中。
(2) BP神經網絡的光通信狀態識別效果要優于K近鄰方法,提高了識別正確率,光通信狀態的識別誤差明顯減少,但是光通信狀態識別結果與實際應用要求有一定的差距。
(3) 在所有方法中,云計算平臺的光通信狀態識別效果最佳,較好地克服了當前光通信狀態識別方法存在誤差大的難題,可以高精度識別各種光通信狀態,光通信狀態識別正確率高。
2.4 識別效率對比
為了測試云計算平臺和傳統單機平臺的光通信狀態識別效率,分別計算兩種平臺的光通信狀態識別時間(ms),其中云計算平臺的節點數為10,結果如圖3所示。
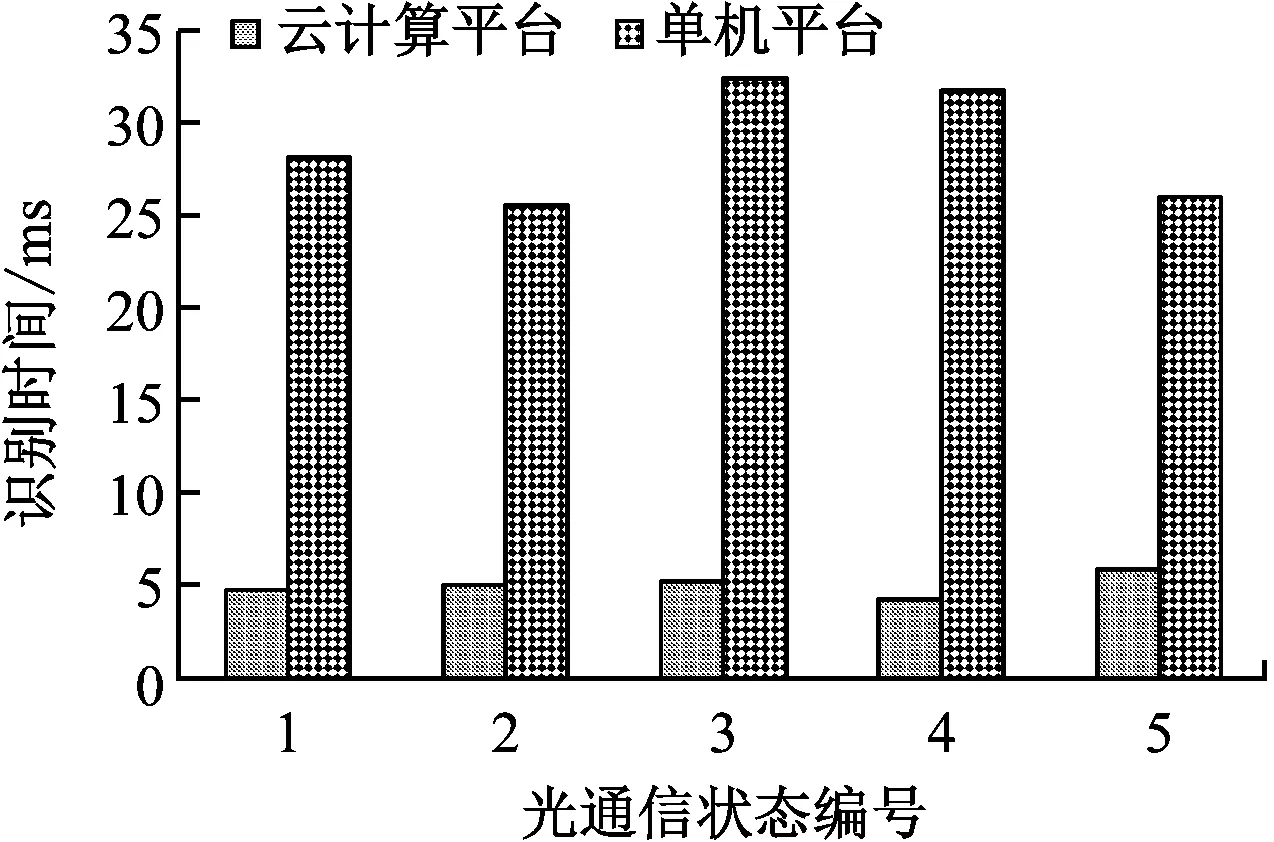
圖3 云計算平臺與傳統平臺的識別時間對比
對光通信狀態識別時間進行對比分析可以知道,云平臺的光通信狀態識別時間的平均值為5.10 ms,單機平臺的光通信狀態識別時間的平均值為28.20 ms,云計算平臺大幅度縮短了的光通信狀態識別時間,提高了光通信狀態識別效率,可以滿足大規模光通信狀態信號的建模與識別研究,實際應用價值得到了有效的提升。
3 總結
光通信狀態識別是當前研究的熱點,傳統方法存在光通信狀態識別誤差大,速度慢等難題,為了提升光通信狀態識別效果,設計了基于云計算平臺的光通信狀態識別方法。測試結果表明,相比較于單機平臺,云計算平臺可以有效縮短光通信狀態識別時間,加快光通信狀態識別速度,能夠高精度識別各種光通信狀態,光通信狀態識別的拒識率和誤識率低于對比方法,具有十分廣泛的應用前景。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
