基于物聯網的自適應六足機器人的設計
2021-09-29 07:10:16馬卓劉舟洲
微型電腦應用 2021年9期
關鍵詞:系統
馬卓, 劉舟洲
(西安航空學院 1.人事處,2.計算機學院, 陜西 西安 710077)
0 引言
六足機器人是用六條腿行走的機械車輛或機器人。由于一個機器人可以在三條或更多條腿上保持靜態穩定,六足機器人在運動中有很大的靈活性。任何一條腿變得不正常,機器人仍然能夠行走。此外,并不是所有的機器人腿都需要穩定;其他的腿可以自由地到達新的足部位置或操縱有效載荷。由于這些原因,六足機器人近年來已成為一個深入的研究課題,其研究主要集中在步態和運動規劃上,目前已達到一定程度的成熟狀態。
近年來對六足機器人的研究可分為步態控制研究和算法控制研究。Manoiu-Olaru和Nitulescu[1]分析了六足機器人在克服障礙過程中的步態。Ollervides等[2]和Nitulescu等[3]使用反向運動學進行與六足機器人腿相關的計算;腿控制是通過計算每個關節的長度和角度來獲得機器人腿的精確位置。Zarrouk和Fearing[4]研究了一個具有特殊結構的單個電機驅動的六足機器人。
在國外一些學者的研究中,使用超聲波傳感器測量的距離值被輸入到輪式機器人的控制器中。在陳睿等[5]的一項研究中,在機器人的左側安裝了三個紅外傳感器,在機器人的左側提供了90°的搜索空間。研究人員Malmros和Erisksson試圖通過安裝力傳感器來平衡六足動物以改進其性能。然而,這種六足動物在最后一刻無法在崎嶇的地形上保持平衡[6-7]。
本文設計研究的主要內容是:開發一種能夠穿越具有挑戰性的地形并能夠避開障礙物的六足機器人;使用IoT幫助六足機器人使用高分辨率攝像機導航;使用圖像處理來幫助確定六足機器人的路線。
1 系統總體設計
該設計的目的是創造一個安全的工作環境,最大限度地減少人為干擾。六足動物的結構和設計就像一只六條腿的蜘蛛,可以滿足本設計的目的。蜘蛛的臂有三個主要部分,與機器人的臂相對應,機器人的臂上有關節,在這些關節上形成一條腿。有三個連桿,和三個關節一樣,它們都相互依賴。關節是:股骨、髖和脛骨。這些都是伺服電機連接的啟示關節。因此,它包含18個伺服電機,負責控制整個身體的運動和姿態。這是考慮到他們的穩定性和移動性,這對于一個組織來說是非常高和可行的,讓它自由移動,基本上它不會對正在進行的工作造成任何干擾。
六足動物結構的設計選擇AutoCAD繪制來實現。硬件結構是用玻璃纖維制成的,其具有抗拉強度。該系統使用了Arduino和樹莓PI控制器,Arduino將由樹莓PI控制器控制。伺服驅動指令的獲取將由Arduino UNO控制。該系統使用降壓轉換器,它從充電電池中增加3 A左右的驅動電流,并為每個伺服系統提供恒定電流。六足動物的運動是這樣的,在每一側只有兩條腿(前腿和后腿)在運動,并且一條腿在同一時刻從另一條腿居中,如圖1中1、2、3所示。
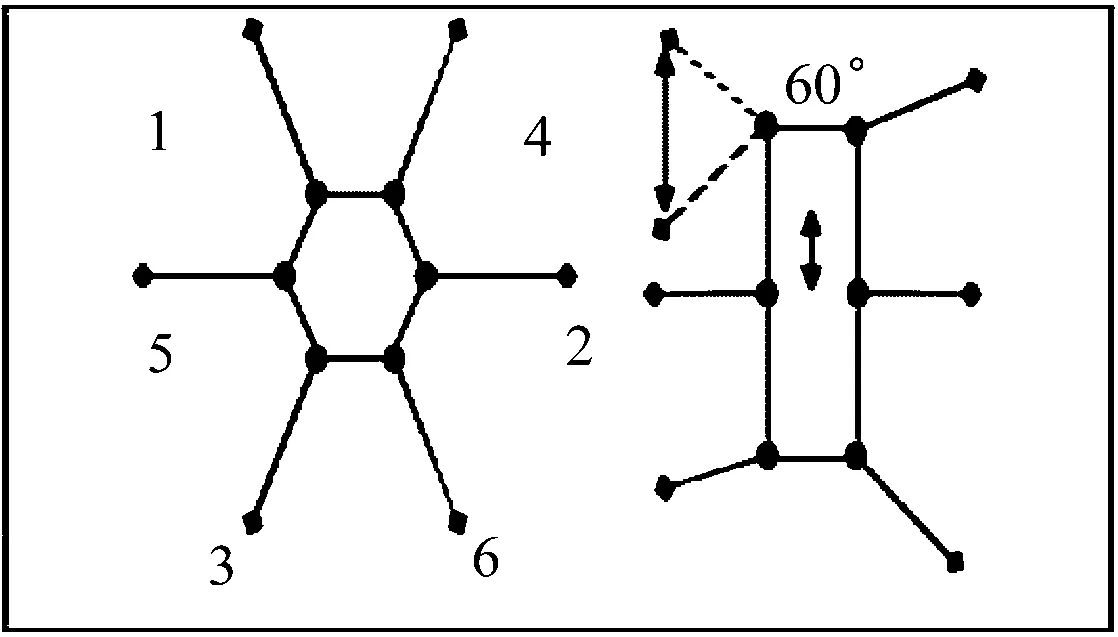
圖1 每條腿的覆蓋程度
在圖1中,覆蓋度為60°,即360°/(6條腿)=60°。伺服電機通過脈寬調制技術進行編程。
PI控制器將連接到熱點,熱點將負責從任何無線互聯網設備(可能是4G設備)獲取給定信息。其中,為了安全的目的,PI將被連接到PI攝像機,該攝像機將負責采集任務區域的圖像,其數據存儲在存儲卡中。六足動物的運動將由Arduino通過伺服驅動器控制。如果出現任何不一致,它將立即向用戶發送一個中斷信號,并通過蜂鳴器向附近的環境發出警報。
2 六足機器人的設計
該六足機器人是長方形的——有兩組腿,每側三條。每條腿有三個自由度,由髖關節、脛骨和股骨關節上的伺服電機驅動。主要優點是伺服電機有編碼器。該六足機器人必須足夠堅固,不可以太重,所以車身選用玻璃纖維板和丙烯酸板,可根據需要切割成不同的形狀,易于操作。六足機器人的設計包括以下幾個模塊,樹莓PI和Arduino控制器,伺服電機,伺服驅動,高分辨率相機。其中最重要的部件是微控制器。這些整個部分通過微控制器協調成為一個單一的系統。整個系統的框圖如圖2所示。

圖2 系統整體框圖
從圖2中可以明顯看出,Arduino和樹莓 PI微控制器在所有傳感器(如攝像機)和執行器(如伺服電機)之間進行協調。18個伺服電機響應來自控制器的信號。IP模塊用于與機器人進行有效的通信。攝像機有助于避開障礙物,WiFi源用于通過IoT控制機器人。伺服驅動板分別用于控制18個電機。六足機器人的原型[8-9],如圖3所示。
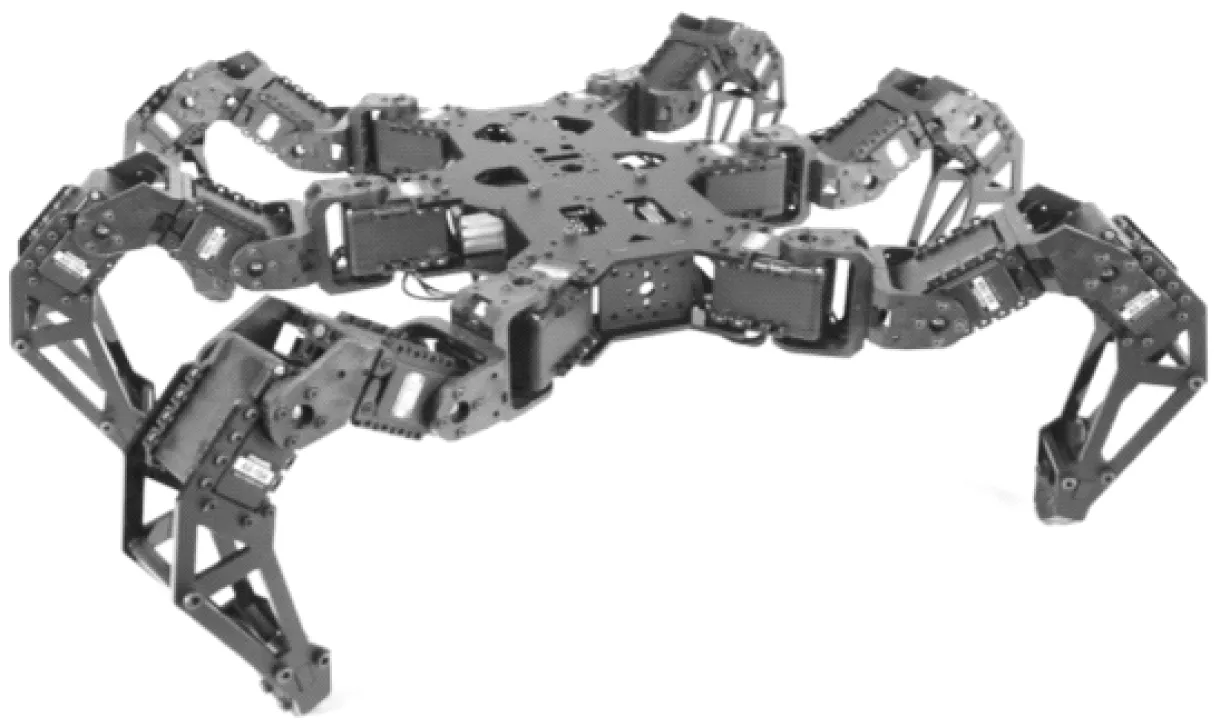
圖3 六足動物的原型
3 系統硬件及其軟件設計
本文的六足機器人的電子結構將建立在玻璃纖維板上,元件將永久固定在玻璃纖維板上。電子結構的輸入信號來自任何可移動網絡/筆記本電腦,連接到網絡接口模塊的無線路由器,網絡接口模塊將包含一個互聯網源,如4G或3G設備,僅用于通信目的。輸入信號將被傳輸到樹莓PI。PI將負責控制并向Arduino UNO發出指令(Arduino只是用C/C++語言編程的)。Arduino的PI將在反饋回路中工作,根據執行的動作給出指令和命令。Arduino將負責控制和執行六足機器人的任務,它將通過PCA9685的伺服驅動器控制駕駛座;Arduino將負責伺服電機的速度,并控制MG 995的所有18個伺服電機,所有電機的同步和移動取決于Arduino,它將由脈寬調制技術控制,由Arduino的庫,改變角度到所需的輸出。
系統中使用的模塊有:藍牙模塊HC-05,用于通過無線設備向Arduino發出命令;降壓轉換器,用于向每個伺服系統提供恒定電壓和所需電流;伺服驅動器PCA9685,通過Arduino控制18個伺服電機的運動。
六足機器人的設置是從Lipo電池獲得電力開始的,來自電池的電流被饋送到降壓轉換器,增加了電流數值,以向每個電子設備提供足夠的電流。樹莓PI通過WiFi的無線信號,通過筆記本電腦通過互聯網,從用戶/運營商那里獲取信息命令,同時在PI上放置一個互聯網設備,使其成為物聯網。樹莓PI負責向Arduino發出命令并執行任何特定的動作,另一方面,PI攝像機連接到PI控制器,通過軟件捕獲圖像并進行圖像處理,存儲數據并將命令發送給操作員的筆記本電腦。當Arduino接收來自用戶的命令,并向伺服驅動器發出命令,伺服驅動器驅動伺服電機,使六足機器人運動起來。如果有干擾信號時,傳感器會發出蜂鳴聲并向操作員發出信號。如果伺服電機或任何電子元件中有干擾,系統會自動向操作員的筆記本電腦發送一個命令,指示發生了錯誤。
本系統使用的軟件有用于機械結構設計的Auto CAD 2007;Arduino操作系統使用Arduino集成開發環境軟件,使用C語言;對于圖像處理,軟件是OPEN CV;控制器樹莓PI是使用Python集成開發環境和OPEN CV。
4 結果和討論
六足動物的六條腿可以同時移動,六條腿的總自由度為18。每個伺服電機都有不同的位置值。六足機器人的有效載荷取決于其伺服電機的扭矩。六足動物向前運動的形狀如圖4所示。
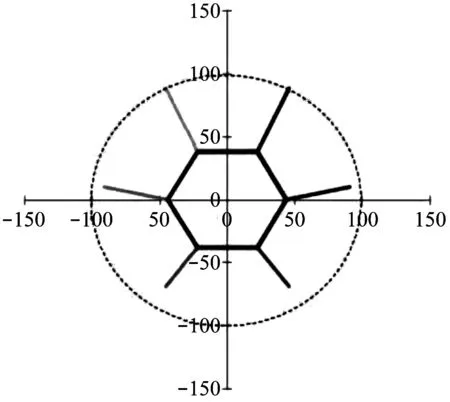
圖4 六足向前運動的形狀
當機器人向前移動時,六條腿中的每一條都記錄了一些運動。每條腿的位置圖如圖5所示。
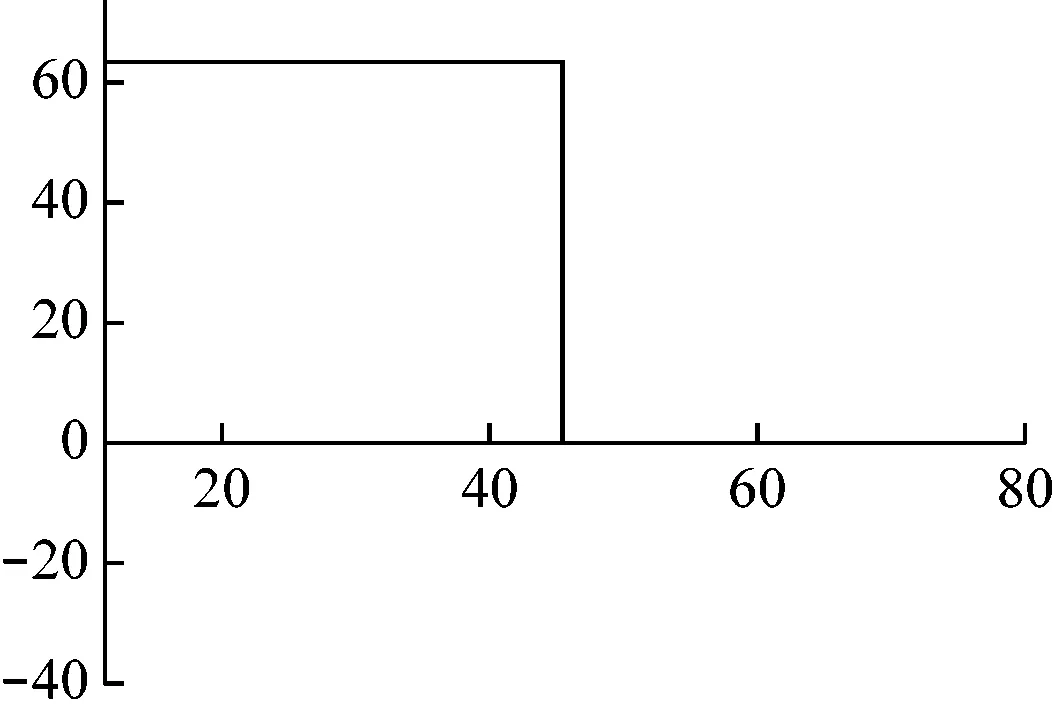
(a) 腿1
(b) 腿2
(c) 腿3
(d) 腿4
(e) 腿5
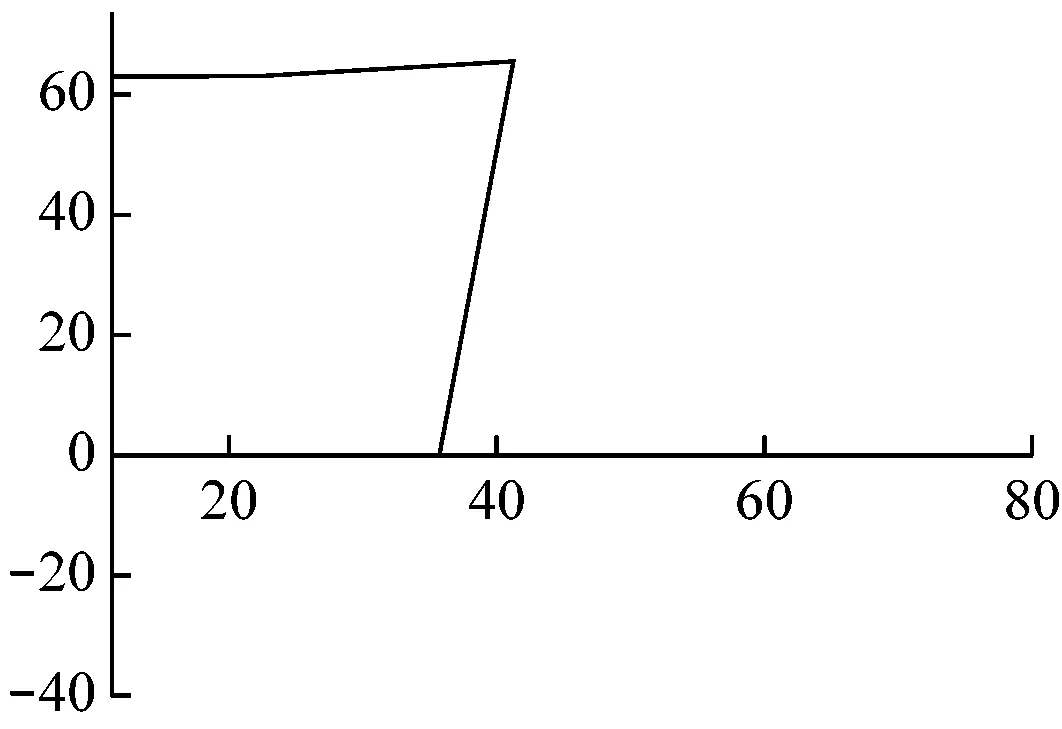
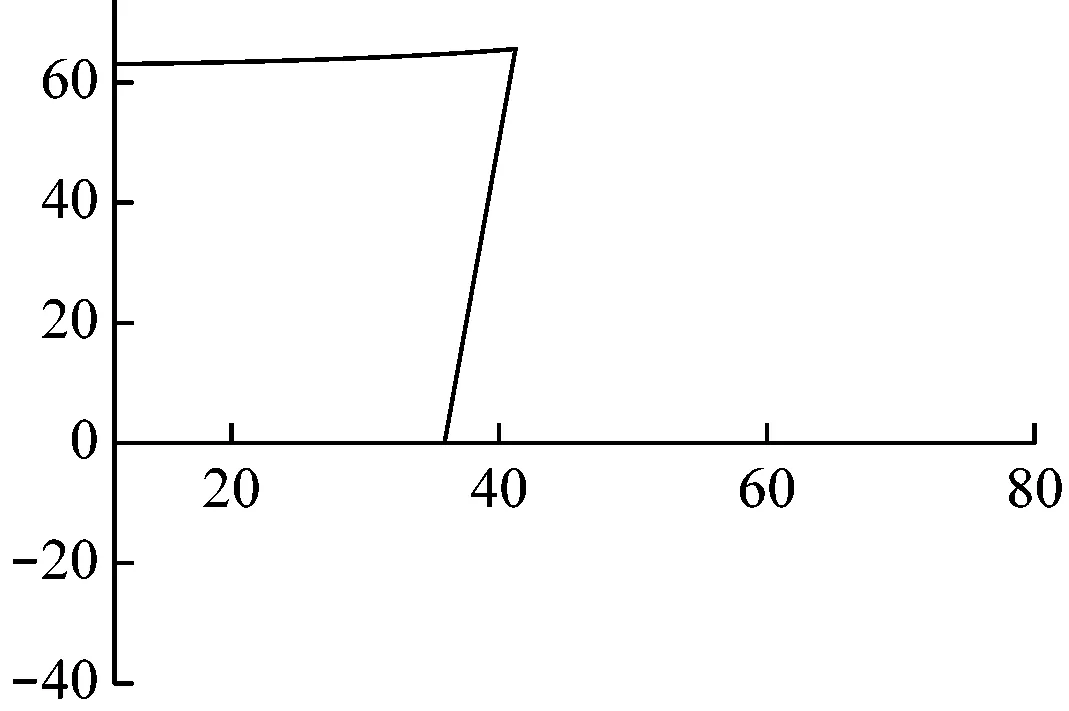
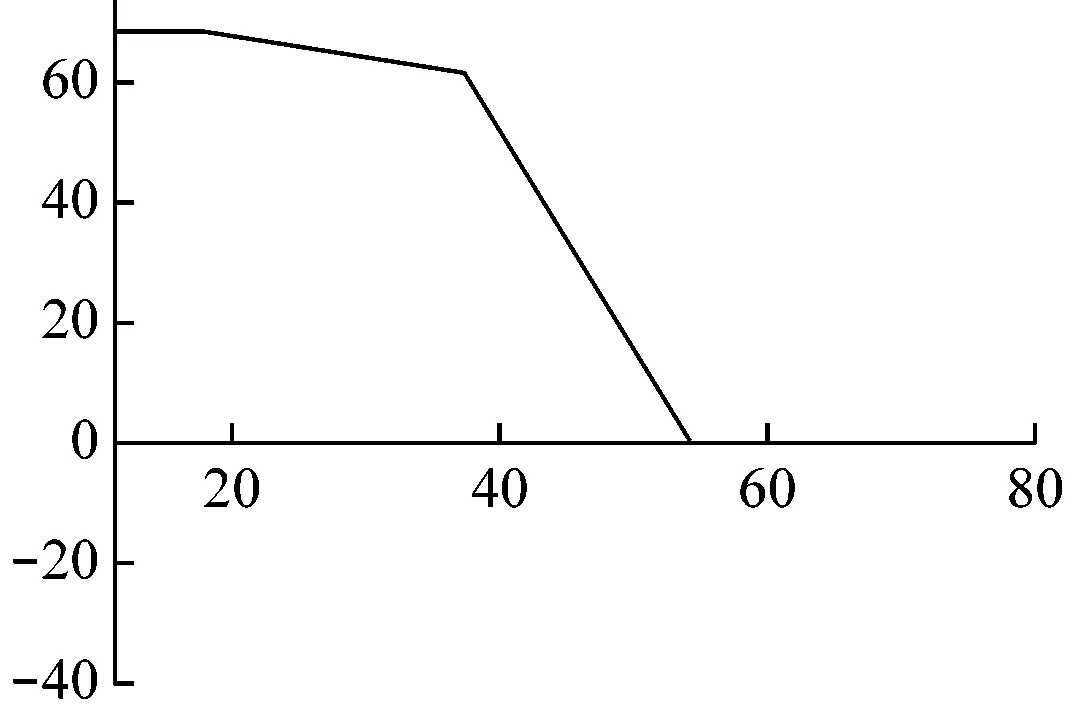
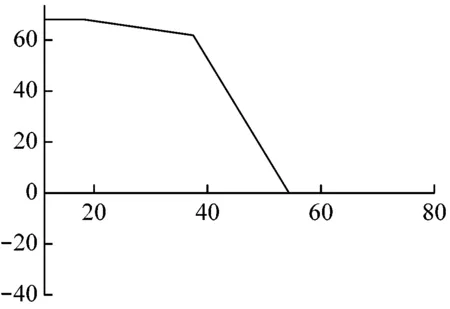
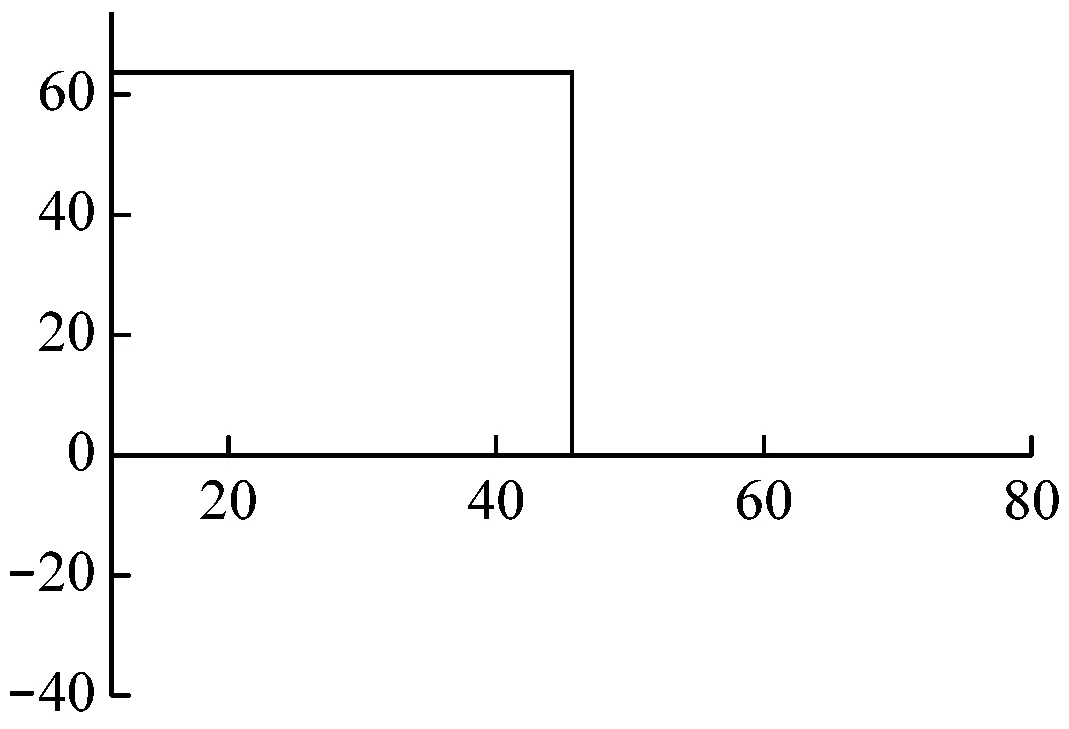
(f) 腿6圖5 所有6條腿的位置圖
從圖5中可以明顯看出,腿1和腿5幾乎不動。腿2和腿3有一些向前的運動。同時,腿4和腿6記錄一些向后的運動。
18個伺服電機位置值的前進方向,如表1所示。
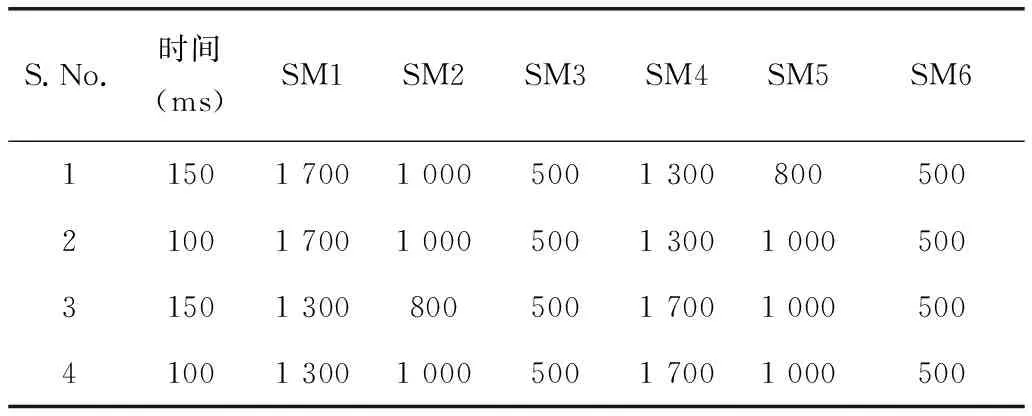
表1 伺服電機的位置(SM=伺服電機)(a) 1-6號伺服電機的位置
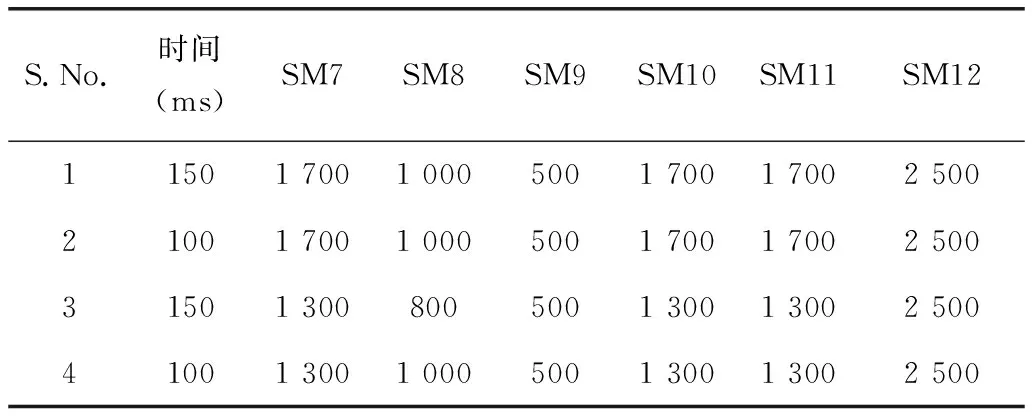
(b) 7-12號伺服電機的位置
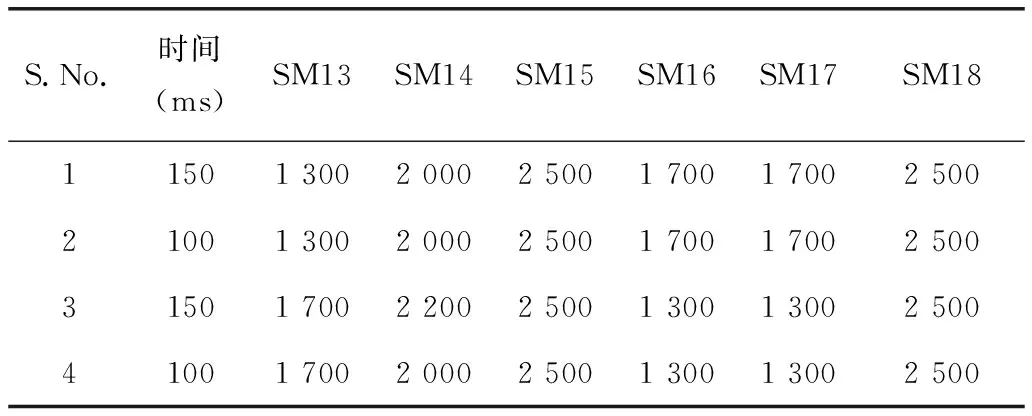
(c) 13-18號伺服電機的位置
以同樣的方式;伺服電機的向后、向右和向左方向也非常相似。在表1中,當時間為150 ms時,伺服1位置為1 700,伺服2為1 000,伺服18為2 500。因此,通過改變時間周期,伺服系統的向前、向后、向左和向右方向的運動逐漸改變,因此,機器人是穩定的。伺服位置值因伺服的不同運動而不同。六足機器人的穩定性取決于其伺服電機和伺服支架。
5 總結
本文設計了一個六足機器人,可以在物聯網的幫助下進行遠程控制。因此,本研究試圖將物聯網、機器人學和圖像處理這三個不同的工程領域結合起來,開發出一個強大而有效的系統。選擇六邊形六足機器人只是因為它的靈活性和任務區的要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
