空管自動化系統應用ADS-B數據的優化探索與風險分析
2021-09-28 01:19:05蔣斯煒
科技創新導報 2021年17期
關鍵詞:卡爾曼濾波
蔣斯煒


DOI:10.16660/j.cnki.1674-098X.2107-5640-7753
摘? 要:隨著ADS-B新技術的不斷發展,探索ADS-B在自動化系統的應用是對空監視技術未來的發展方向。本文主要通過簡介ADS-B技術在空管運行領域的優勢,探索ADS-B功能的發展方向。通過在自動化系統截取ADS-B數據報文,分析數據項內容,并以自動化系統監視數據處理模塊為例,探索ADS-B位置、高度等信息對自動化系統的優化,并提出具體的監視數據處理模塊中多傳感器跟蹤結構的業務流程。同時,分析ADS-B信息未來在民航空管運行中存在的風險,并提出建立ADS-B數據評估機制以及黑名單運行機制的建議。
關鍵詞:ADS-B? 自動化系統? 數據解析? 卡爾曼濾波? 數據融合
中圖分類號: 文獻標識碼:A 文章編號:1674-098X(2021)06(b)-0075-03
Optimization Exploration and Risk Analysis of ADS-B Data in Automation System Application
JIANG Siwei
(NATMB,? Beijing, 100621 China)
Abstract: With the continuous development of new ADS-B technology, exploring the application of ADS-B in automation system is the future development direction of air surveillance technology. This paper mainly explores the development direction of ADS-B function by introducing the advantages of ADS-B technology in the field of air traffic control. By intercepting ADS-B data messages in the automation system, analyzing the contents of the data items, and taking the automated system monitoring data processing module as an example, exploring the optimization of the ADS-B position and height information to the automation system, proposing specific monitoring data processing,and giving multi-sensor tracking structure of the business process in the module. At the same time, analyze the risks of ADS-B information in the future operation of civil aviation management, and propose to establish ADS-B data evaluation mechanism and blacklist operation mechanism.
Key Words: ADS-B; Automation system; Data analyse; Kalman filter; Data couple
ADS-B是廣播式自動化相關監視技術,可以為民航空管提供航空器的定位信息,是空管自動化系統重要監視源之一。目前,ADS-B信號在空管自動化系統中的應用易受外界因素影響,本文主要通過數據解析與分析,提出ADS-B信號應用的優化建議,化解運行中存在的風險。
1? ADS-B數據格式解析
ADS-B數據其文本協議格式主要為CAT021。本文主要通過截取ADS-B CAT021報文信息開展分析,CAT021報文數據結構如表1所示。
ADS-B報文的解析和生成都需要按照用戶應用相關表(UAP)進行設定,以一段數據實例詳細分析具體ADS-B報文有關內容,ADS-B數據通過在自動化系統前端處理服務器上截取,一般以十六進制形式保存,例:15002fba1df822221223043321e0044c0bb013f8baa78032000070804310100075000000 c3074cf5c2000800002b4。按照UAP數據表解析結果如表2所示。
2? 自動化系統應用ADS-B數據的優化
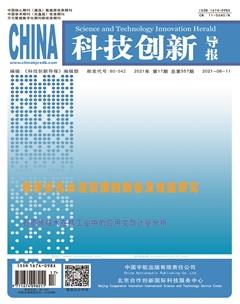
自動化系統監視數據處理目前主要采用多雷達跟蹤的結構,速度、位置等信息的平滑計算沿用卡爾曼濾波算法,多雷達跟蹤結構的具體工作流程如圖1。
原有的多雷達跟蹤結構(圖1示)主要原理通過飛機進入一個雷達覆蓋區時,航跡起始模塊會參照初始雷達點的計算結果,生成一個新的航跡。當多個新的航跡點跡進入系統時,此時多雷達跟蹤系統將依次通過預相關、相關、關聯技術的流程來計算出最適合的航跡。
由于ADS-B和雷達屬于不同類型的監視系統,所以多雷達跟蹤系統要對兩者接收到的數據分別進行處理后再融合。隨著ADS-B的廣泛使用,航跡處理系統也由多雷達跟蹤系統升級到多傳感器跟蹤系統,如圖2所示。預相關和相關模塊可以基于飛機的運動特性和24位飛機地址碼來確定與多傳感器航跡相關的報告,提升系統位置信息的關聯耦合度,進而在多架航空器同時運行時提升了系統STCA、MSAW等告警的計算精度。
3? 風險分析及建議
3.1 24位地址碼管理
目前,通過S模式雷達的運行發現,由于航空器商業買賣原因,出現部分航空器的24位地址碼未進行合理的更改,進而造成自動化系統運行時出現相應的錯誤運行。
3.2 電磁環境干擾
ADS-B主要通過1090MHz擴展電文下行有關監視信息,ADS-B的位置信息主要通過多顆衛星定位,但如果出現大頻率電磁干擾或者GPS干擾器干擾,可能會造成ADS-B某一區域出現大面積的位置偏移,進而對空管運行產生相應的影響。
3.3 數據質量完好性
數據質量完好性是通過ADS-B報文中的完好性質量參數NUC、NACp、SIL、NIC、NACv精度值來衡量的。亞太地區國家認為機載設備DO-260服務標準且NUC為5的ADS-B報文數據符合類雷達服務的數據完好性要求,基于該情況,對ADS-B監視數據的完好性評估是在一段時間間隔完成,從地面站所覆蓋空域內的所有飛機的ADS-B報文數據中提取的NUC數據,并計算NUC為5的報文數比例,進而得出ADS-B監視數據的完好性結論。
完好性評估是ADS-B正式投入運行前需要統計的重要工作,以部分地區為例,按照NUC>5的航跡數/總航跡數,可得出完好率,我認為只有完好率在99%以上的地區,可以達到運行標準。NUC<5的數據經常會出現航跡位置抖動、回跳等情況,進而造成系統航跡的位置精確性的下降,故在ADS-B正式應用前,要充分做好ADS-B完好性統計工作。
未來,隨著技術發展,可調整與優化NACp、NIC、SIL、NACv參數值,來確保ADS-B的信號精度能夠更為準確。雖然ADS-B監視可以提高監視數據的精度、擴大覆蓋范圍,但是建議ADS-B在正式應用前應建立完善的評估機制,包括衛星完好性檢測、數據完好性統計、航空器機載設備統計、覆蓋分析等一系列評估流程;同時,部分未加裝ADS-B應答機的航空器以及機載應答機長期存在故障的航空器投入運行時,應建立黑名單運行機制,對于不滿足ADS-B運行的航空器,應建立必要的運行措施。
參考文獻
[1] 李宇寬.關于ADS-B技術在空中交通管制中的應用研究[J].科學大眾,2019(2):53.
[2] 喻之暢.空管自動化系統中ADS-B技術的應用分析[J].中國科技縱橫,2019(9):20-21.
[3] 王子龍.ADS-B監視數據質量分析[D].北京:中國民用航空飛行學院,2018.
[4] 尚德佳.空管多監視數據融合研究[D].西安:西安電子科技大學,2016.
[5] 馬義.ADS-B數據和雷達數據融合分析[J].中文科技期刊數據庫工程技術,2016(24):273.
[6] 劉云豐,廖盈庭,劉書博.基于Python的AsterixCat021數據格式解析分析與實現[J].科技與創新,2019,4 (14):46-47.
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36