草莓采摘機械研究現狀與發展趨勢
2021-09-28 19:56:27祝前峰陸榮鑑魯峻李奉順
農業科技與裝備 2021年5期
祝前峰 陸榮鑑 魯峻 李奉順

摘要:研究草莓采摘機械對于實現草莓機械化生產具有重要意義。綜述目前草莓采摘的主要方式,分析現有草莓采摘機械應用中存在的問題,指出未來草莓采摘機械的發展趨勢,以期為草莓采摘機械的性能改進及推廣應用提供參考。
關鍵詞:草莓;采摘機械;現狀;發展趨勢
中圖分類號:S225? ? 文獻標識碼:A? ? 文章編號:1674-1161(2021)05-0062-03
遼寧地區肥沃的土壤和適宜的氣候適合草莓種植,東港、莊河等地依靠草莓產業實現了增收保收、脫貧致富。隨著城鎮化的不斷推進,農業從業人數銳減,農忙時節用工難和人工成本增長問題日益凸顯。草莓采摘時間約占整個生產過程的1/4,采收成本占草莓生產總成本的50%~70%。草莓一般采用大棚種植,棚內草莓整齊排列、分布規則,為機械化采收提供了有利條件;草莓果實為穗狀串行,枝葉遮擋較少,果實色澤明亮,為機器視覺識別提供了有利條件。機械化采收可以克服人工采摘勞動強度大、效率低、成本高和工作環境差等缺點,研究草莓采摘機械具有重要的實用價值和現實意義。
1 目前草莓采摘的主要方式
1.1 人工采摘
人工采摘是目前草莓采摘的最主要形式,果農用雙手或剪刀將果實從藤上取下輕輕放入身旁的收集筐中,需反復彎腰勞作。但草莓采摘周期較短,成熟的草莓采摘不及時將會大大降低果實品質,對后期的運輸、加工和銷售產生直接影響。人工采摘草莓能夠最大程度保證果實的完好性,但勞動強度大、采摘效率低、人工成本高,大大阻礙了草莓產業的大規模發展,挫傷了果農的生產積極性,因此需要引入機械化采收來完成繁重的采摘任務。
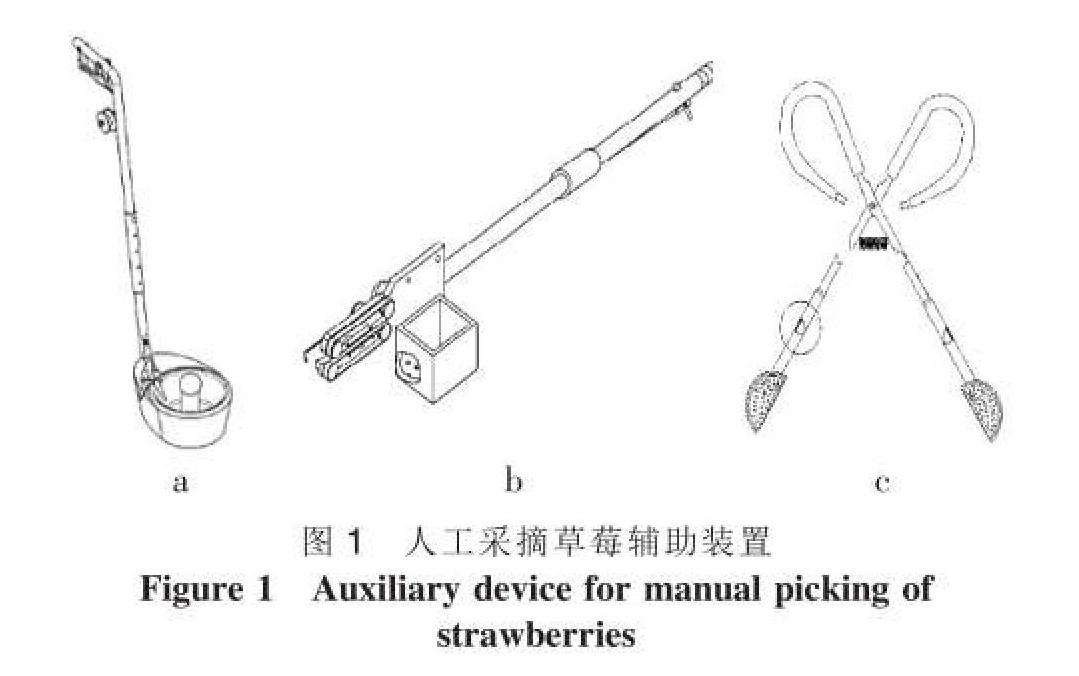
出于減少彎腰頻次等降低勞動強度的考慮,研究人員設計出多種人工輔助采摘裝置(如圖1所示)。杜沛松等人設計一種可站立完成采摘收集一體化的草莓收獲裝置(圖1中a),使用時根據自身身高調整伸縮桿長度,肉眼識別定位成熟草莓,將剪刀的開口對準草莓果梗,按下活動把手,活動把手連接鋼絲繩驅動剪切機構完成果梗分離,果實在慣性力作用下落入收集裝置,同時鋼絲繩也驅動收集裝置底部棘爪帶動棘輪轉過一定角度,防止果實在一個方向上堆疊;范暉等人設計一種手持式草莓采摘裝置(圖1中b),同樣可以實現采收一體化,該裝置采用直流電機驅動帶傳動,帶傳動與另一平帶直接接觸,通過調整帶傳動的張緊力等產生摩擦力帶動平帶同步運轉,采摘桿前端的鉤子勾住草莓果梗,扣動扳機鉤子將果實和果梗向后拉扯,果梗進入兩帶之間并一同向后運動,傳送帶中部設有刀片切斷果梗,兩帶夾緊部分果梗和果實輸送進入收集裝置;合肥某農業科技公司設計一種可改變長度的草莓采摘器(圖1中c)(專利號201921120749.4),可根據工況調整草莓采摘器的兩臂長度,剪勺內側均設有刃口,工作時手動使兩臂靠近剪勺包絡住草莓,果梗被兩剪勺內側的刀刃切斷,位于收集裝置上方時在彈簧作用力下兩剪勺打開,果實落入采收裝置,完成采摘。
1.2 機械式采摘
雖然輔助裝置在一定程度上緩解了人工勞動強度,但其采摘效率比不上人工彎腰采摘,沒有從根本上解決勞動強度大、人工成本高、采摘效率低和工作環境差等缺點。因此,機械式采摘在草莓采摘中得到應用,相應地出現多種草莓采摘機械(如圖2所示)。
杜國峻等人設計一種草莓采摘機(圖2中a),機器由單電機驅動,電機驅動套筒旋轉帶動套筒上的兩機械手爪,利用手爪雙曲柄機構的急回特性和伸縮特性將草莓從地壟上挑起,使得果實與壟面分離,隨著手爪進一步運動果梗被折斷,果實被送入收集圓盤,收集圓盤在電機帶動下作圓周運動,采摘的草莓隨圓盤一起轉動,圓盤兩側設有肋板防止果實掉落,待果實轉到最高點處,在其自身重力和錐形滑臺的作用下滑落,進入收集裝置,大量試驗證明平均作業效率為51.7個/min,采摘失敗率為0.81%;竇艷濤等人設計一種吸入式草莓自動采摘裝置(圖2中b)(專利號201821882603.9),通過改變涵道的開關量和氣流大小來改變涵道內氣壓,使內部產生一個低壓,果實在氣壓的作用下被吸入,吸收筒上方設有凸輪剪切機構完成果梗分離,吸入的果實通過涵道進入傳送帶,運送至收集盒;陳逸青等人設計一種采收一體化草莓采摘裝置(圖2中c),通過采摘手柄末端電動切割鋸片旋轉完成果梗分離,果實落入導流網,網底設有傳送鏈,果實被傳送結構揚起并隨鏈一起運動,最終進入承接盤。
1.3 機器人采摘
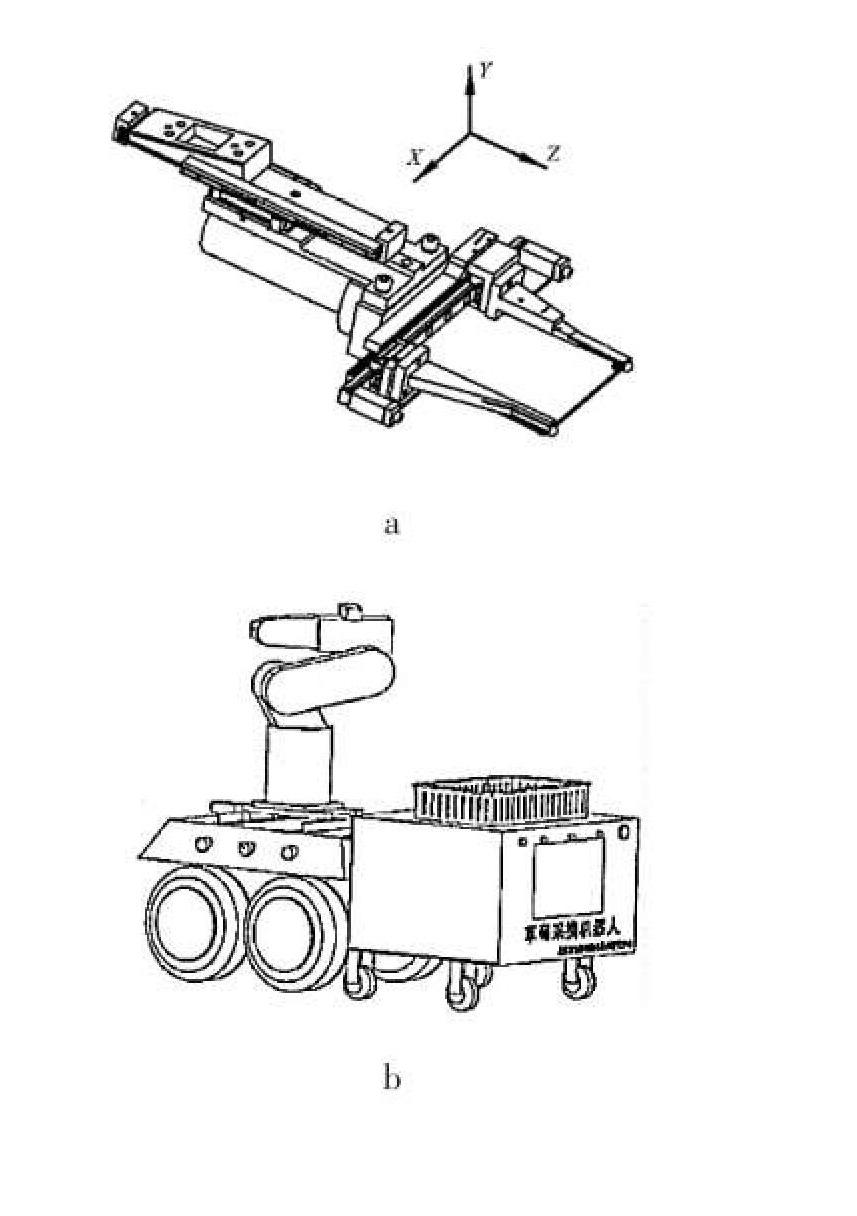
機械式采摘草莓效率得到一定的提升,動力源主要由電動機、柴油機等提供,但仍然需要人工花費大量時間參與其中,進行肉眼識別定位果梗、推動機器行走和手動完成收集等。因此,研究更加自動化、智能化、高效率的機器人采摘(如圖3所示),以實現草莓高效率、高質量采摘。
王糧局等人研究機器人采摘草莓發現,果實重疊和枝葉遮擋等會影響識別效果,導致末端執行器定位不準確,因此設計一款大容差高效末端采摘器(圖3中a),導軌與滑塊的配合可以實現末端采摘器前后移動貼近壟壁,緩緩向上使果實進入兩夾指和攏果繩之間,沿著Z方向后退一定距離,將草莓拉起,兩夾指閉合完成剪切并夾住果實運動到收集裝置,大量試驗證明采摘器定位誤差在±7 mm范圍內,采摘成功率為97.70%以上;馮青春等人針對高架栽培草莓設計一款可自主導航、自動采摘的草莓采摘機器人(圖3中b),采用機器視覺系統識別定位成熟草莓的空間位置,為機械臂軌跡規劃提供依據,腰關節可旋轉180 °實現對兩側同時采摘,末端采摘器采用“吸、夾、切”3步,首先為風琴式吸盤提供負壓吸住果實,然后兩手指在電磁閥的作用下閉合使電熱絲通電,果柄在切割墊板與高溫電熱絲嵌合下被切斷,保證果實的完好性并防止切口細菌感染,大量試驗證明平均定位誤差小于2.2 mm,單次采摘平均耗時10.99 s;劉志剛等人基于光程調節結構對草莓采摘機器人進行優化設計(圖3中c),引入一種新的光定位方法,同時在運動控制中加入PID算法,提高了運動的穩定性,大量試驗證明采摘破損率明顯降低,最大漏采率僅為0.72%,滿足精密采摘的要求。
2 草莓采摘機械存在的問題
2.1 機械結構設計仍需改進
輔助機械結構功能單一,其采摘效率不如人工彎腰采摘,實用價值較低,單一考慮勞動強度而忽視采摘效率不可取;機械式采摘為半自動化采摘,需要人工輔助,且采摘柔順性差,草莓質地柔軟極易發生損傷;采摘機器人結構設計冗雜,片面追求多自由度,忽視機械臂運動次數越多產生的振動和定位誤差就越大,末端執行器柔順性較差易對草莓產生機械損傷和對周圍果實、枝葉造成影響。因此,草莓采摘機械結構應不斷優化和改良,以滿足草莓高效、無損采摘的需求。
2.2 采摘識別和定位不準確
草莓識別和定位對于草莓采摘機器人而言至關重要,其決定了機械臂的運動狀態和位姿,間接影響采摘果實的品質。草莓的識別受到多種因素的影響,首先是自然環境的影響,包括采摘天氣的陰晴、采摘時光線的強弱、采摘時是否有環境擾動等;其次是草莓植株本身的影響,包括果實重疊和莖葉對果實的遮擋、果實表皮有傷疤等,這對機器視覺的影響最大,難以實現對果實的精準識別;再次是機器本身對視覺的影響,包括行走結構產生的振動、機械臂運動過程中產生的振動和前一個草莓采摘完產生的振動等,這在一定程度上對視覺識別產生影響。草莓的定位高度依賴于草莓識別提供的三維立體坐標,同時也受機械臂運動精度的影響。
3 草莓采摘機械的發展趨勢
3.1 機械結構趨于小型化與實用化
為了提高土地利用率和草莓產量,草莓種植的間距較小,因此對采摘機械提出小型化的要求。小型化機械一方面因整體小巧而可以在過道行走不傷害到植株,另一方面因結構靈活而可以降低枝葉遮擋等影響。無論是采摘機械還是機器人都應將采摘效率和果實完好率相結合,根據實際需求不斷改進,逐步走向實用化。
3.2 控制系統趨于自動化與智能化
采摘機器人的控制系統主體分為機器視覺控制系統和運動控制系統兩部分。草莓采摘機器人控制系統不斷朝著自動化和智能化方向發展,為高效、無損草莓采摘助力。
參考文獻
[1] 張曼,徐瑞峰,馮青春,等.單驅雙夾式草莓末端執行器設計[J].農機化研究,2019,41(6):93-97,103.
[2] 杜沛松,杜娟,何延東,等.采摘收集一體化草莓收獲機構的設計研究[J].農業科技與裝備,2019(5):23-25.
[3] 范暉,李志晶,李明明,等.手持式草莓采摘收集一體化裝置的設計[J].農機化研究,2020,42(7):94-98,110.
[4] 杜國峻,姚福林,曹建杰,等.地壟式單驅多果草莓人工輔助采摘裝置設計[J].機械設計,2020,37(7):19-23.
[5] 陳逸青,邢玉龍.草莓采摘收集一體機實驗分析[J].內蒙古科技與經濟,2019(17):84-85,87.
[6] 劉志剛,王風燕,魏純.精密草莓采摘機器人優化設計——基于光程調節結構[J].農機化研究,2016,38(6):16-20.
Research Status and Development Trend of Strawberry Picking Machinery
ZHU Qianfeng, LU Rongjian*, LU Jun, LI Fengshun
(College of Mechanical and Electronic Engineering, Nanjing Forestry University, Nanjing 210037, China)
Abstract: Research on strawberry picking machinery is of great significance to realize mechanization of strawberry production. This paper summarized the main methods of strawberry picking, analyzed the existing problems in the application of strawberry picking machinery, and pointed out the development trend of strawberry picking machinery in the future, in order to provide reference for the performance improvement, promotion and application of strawberry picking machinery.
Key words: strawberry; picking machinery; status; development trend
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 18:10:09
現代經濟信息(2016年19期)2016-10-20 15:51:16
現代經濟信息(2016年19期)2016-10-20 15:26:02
中國科技博覽(2016年19期)2016-10-19 13:03:52
中國科技博覽(2016年18期)2016-10-19 09:22:46
中國市場(2016年35期)2016-10-19 01:55:52
成才之路(2016年26期)2016-10-08 11:33:07
成才之路(2016年25期)2016-10-08 10:37:13
成才之路(2016年25期)2016-10-08 10:20:44
小學教學參考(語文)(2016年9期)2016-09-30 08:27:37