船載穩定平臺的魯棒自適應神經網絡控制
2021-09-27 00:53:24賀廣健,彭程
電腦知識與技術 2021年19期
賀廣健,彭程
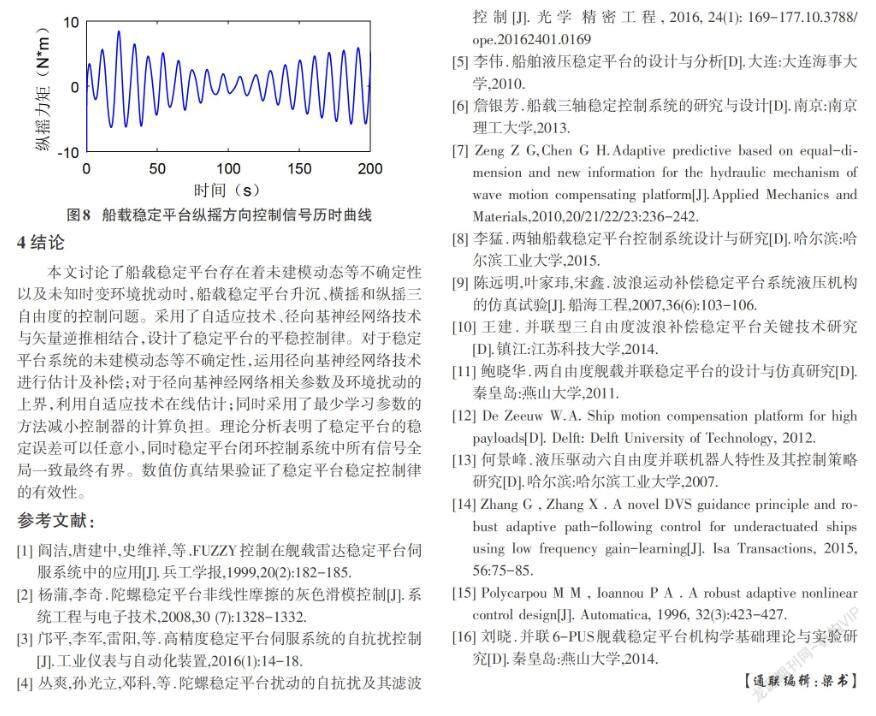

摘要:針對船載穩定平臺的平穩控制問題,考慮到穩定平臺存在未建模動態等不確定性以及未知時變環境擾動,將自適應技術、徑向基神經網絡技術與矢量逆推的方法相結合,提出一種魯棒自適應神經網絡的穩定平臺控制方案。采用矢量逆推的方法,設計穩定平臺的平穩控制律;運用徑向基神經網絡技術對穩定平臺系統的未建模動態等不確定性進行估計及補償;利用自適應技術在線估計徑向基神經網絡相關參數及環境擾動的上界;并引入最少學習參數方法降低控制方案的計算負載。通過Lyapunov理論證明穩定平臺閉環控制系統的所有變量的一致最終有界性。最后,基于穩定平臺的仿真結果驗證了所提出的魯棒自適應神經網絡控制方案的有效性。
關鍵詞:穩定平臺;自適應技術;徑向基神經網絡;矢量逆推;最少學習參數
中圖分類號:U661.33? ?文獻標識碼:A
文章編號:1009-3044(2021)19-0009-05
Robust Adaptive Neural Network Control of Ship-borne Stabilization Platform
HE Guang-jian, PENG Cheng
(Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China)
Abstract: Aiming at the problem of stable control of the ship-borne stabilization platforms, considering the uncertainties such as unmodeled dynamics and unknown time-varying environmental disturbances of the ship-borne stabilization platforms.The adaptive technology, radial basis neural network technology and backstepping method are combined to propose a robust adaptive neural network stable platform control scheme. The method of backstepping is used to design the stable control law of the stable platform; the RBF neural network technology is used to estimate and compensate the uncertainties such as unmodeled dynamics of the stable platform system. The adaptive technology is used to estimate the relevant parameters of the RBF neural network and the upper bounds of environmental disturbances; and the least learning parameter method is introduced to reduce the calculation load of the control scheme. The Lyapunov theory is used to prove that all variables of the closed-loop control system of the stable platform are uniformly ultimately bounded. Finally, the simulation results based on the stable platform verify the effectiveness of the proposed robust adaptive neural network control scheme.
Key words: stable platform; adaptive technology; radial basis neural network; backstepping; least learning parameter
1 引言
作業中的船舶受到風、浪、流等海洋環境影響會產生橫搖、縱搖、艏搖、橫蕩、縱蕩和升沉六個自由度的運動,船舶搖蕩運動嚴重影響船載直升機的安全起降、船載吊車等設備的安全作業等。船舶橫蕩、縱蕩和艏搖運動會通過船舶動力定位系統被抑制,所以為了補償船舶橫搖、縱搖和升沉運動,本文提出將穩定平臺作為船舶的減搖裝置,隔離船舶橫搖、縱搖和升沉運動對船舶設備等的影響。
船載穩定平臺控制精度是船載穩定平臺的關鍵性能指標,有效的控制方案可以提高穩定平臺控制精度。船載穩定平臺系統是一個嚴重非線性的、存在著未知時變環境擾動以及未建模動態等不確定性的系統。文獻[1]針對艦載雷達穩定平臺,采用帶有修正因子的模糊控制算法設計控制器,具有良好的魯棒性與控制效果;文獻[2]針對陀螺穩定平臺,采用灰色滑膜算法設計控制器,有效減小了系統非線性摩擦對控制效果的影響;文獻[3-4]針對陀螺穩定平臺,采用自抗擾控制技術設計控制器,有效地提高系統的抗干擾性和魯棒性;然而,文獻[1-4]的被控系統的主要結構為三軸陀螺式,但三軸陀螺式穩定平臺結構的限制,其承載能力較低。近年來,隨著海洋工程快速發展對大型船載設備穩定的需求,大型船載穩定平臺應運而生。針對大型船載穩定平臺的穩定控制,文獻[5-7]分別采用分離式PID、專家PID、非線性PID設計控制器,文獻[8-10]將模糊與PID相結合形成模糊自適應PID控制方案設計控制器,雖然上述算法具有PID不依賴于模型等優點,但是對于外界時變環境擾動的抗干擾性仍比較差。文獻[11]針對并聯穩定平臺系統,采用滑膜變結構方法設計了控制器,引入了邊界層減小抖振問題,使得系統最終具有較強的魯棒性,但系統仍存在抖振;文獻[12]針對船載穩定平臺系統,采用非線性模型預測控制原理設計了控制器,但模型預測需部分模型先驗知識。
