基于TensorFlow神經(jīng)網(wǎng)絡(luò)的MCR-WPT系統(tǒng)負載與互感識別方法
2021-09-25 07:34:28蘇玉剛劉家鳴侯信宇
電力系統(tǒng)自動化 2021年18期
蘇玉剛,陽 劍,戴 欣,劉家鳴,侯信宇
(1.重慶大學(xué)自動化學(xué)院,重慶市 400030;2.國家無線電能傳輸技術(shù)國際聯(lián)合研究中心,重慶市 400030)
0 引言
無線電能傳輸(wireless power transfer,WPT)技術(shù)作為一種安全、環(huán)保、便捷、易維護的新型供電方式,受到了國內(nèi)外眾多學(xué)者的關(guān)注和研究[1-3]。其中,磁耦合諧振式無線電能傳輸(magnetic coupling resonant wireless power transfer,MCR-WPT)技術(shù)是目前最受關(guān)注的技術(shù)[4-6],在電動汽車[7-8]、航空航天[9]、水下設(shè)備供電[10]等領(lǐng)域逐步得到推廣應(yīng)用。
在MCR-WPT系統(tǒng)的實際應(yīng)用中,對于電動汽車等移動設(shè)備無線供電系統(tǒng),其負載與互感不可避免地會發(fā)生變化,這種變化不僅會使系統(tǒng)的工作頻率發(fā)生漂移[11-12],而且會降低系統(tǒng)的傳輸功率和傳輸效率[13]。如果沒有負載與互感識別環(huán)節(jié),針對負載與互感發(fā)生變化的情況,為了保持系統(tǒng)較好的傳輸性能,目前主要有以下3種控制方法:①在發(fā)射端進行控制;②在接收端進行控制;③在發(fā)射端和接收端同時進行控制。上述3種方法通過在接收端增加額外的通信設(shè)備[14]、Buck變換器[15]、可控開關(guān)[16]等輔助手段對系統(tǒng)進行調(diào)節(jié)和控制,其對系統(tǒng)性能的提升具有一定的效果,但不能從根本上解決因負載與互感寬范圍變化導(dǎo)致的系統(tǒng)工作頻率漂移、工作特性改變等問題。因此,在MCR-WPT系統(tǒng)中當(dāng)負載和互感發(fā)生變化時,系統(tǒng)需要實時獲取負載與互感參數(shù)信息,進而采取更有效的手段對系統(tǒng)進行控制以確保系統(tǒng)穩(wěn)定、高效運行,而負載與互感參數(shù)識別正是其中的關(guān)鍵問題[17-19]。
目前已有學(xué)者圍繞MCR-WPT系統(tǒng)的負載與互感識別技術(shù)進行了相應(yīng)的研究,文獻[18]通過建立SS型MCR-WPT系統(tǒng)穩(wěn)態(tài)電路模型,利用遺傳算法尋求負載最優(yōu)解進而得到互感值。文獻[19]以接收端為并聯(lián)補償形式的MCR-WPT系統(tǒng)為研究對象,通過檢測系統(tǒng)工作頻率、逆變器的輸出電壓和電流,根據(jù)系統(tǒng)穩(wěn)態(tài)電路模型計算得到負載與互感值。文獻[20]通過切換SS型MCR-WPT系統(tǒng)頻率,使其工作在非工作頻率點上完成對負載與互感的識別。文獻[21]通過在SS型MCR-WPT系統(tǒng)發(fā)射端增加一套輔助逆變器和匹配的耦合機構(gòu),使系統(tǒng)工作在不同模式下完成對負載與互感的識別。文獻[22]通過可變開關(guān)電容和藍牙通信模塊實現(xiàn)發(fā)射端和接收端電路諧振狀態(tài)的改變,進而識別出LCC/S型MCR-WPT系統(tǒng)的互感值。
現(xiàn)有研究中的MCR-WPT系統(tǒng)負載與互感識別方法主要存在以下問題:①大多數(shù)識別方法研究主要以SS型MCR-WPT系統(tǒng)偏多,其中部分識別方法只能識別負載或互感中的單一參數(shù);②有的識別方法對系統(tǒng)建模精確性要求較高,且需要運行迭代算法,識別時間相對較長;③有的識別方法需要在接收端進行電路參數(shù)檢測,增加了系統(tǒng)體積和成本;④還有的方法需要改變系統(tǒng)的工作頻率來進行識別,影響了系統(tǒng)的傳輸性能。
針對上述問題,本文提出了基于TensorFlow神經(jīng)網(wǎng)絡(luò)的雙LCC型MCR-WPT系統(tǒng)負載與互感識別方法。通過對雙LCC型MCR-WPT系統(tǒng)進行建模分析,得到了識別模型的輸入?yún)?shù),將MCRWPT系統(tǒng)的負載與互感識別問題等效為非線性方程的求解問題,進而轉(zhuǎn)化為深度學(xué)習(xí)非線性擬合問題。本文首先建立TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型,通過設(shè)置不同的偏移距離d和傳輸距離h得到互感M的訓(xùn)練數(shù)據(jù),再將訓(xùn)練數(shù)據(jù)輸入模型進行離線訓(xùn)練,訓(xùn)練完成后將識別模型導(dǎo)入控制器進行在線識別。在線識別時,只需要檢測輸入電流值和傳輸距離,調(diào)用識別模型計算得到負載值與互感值。仿真與實驗結(jié)果驗證了本文提出方法的正確性和有效性。
1 雙LCC型MCR-WPT系 統(tǒng)
雙LCC型MCR-WPT系統(tǒng)具有發(fā)射端和接收端結(jié)構(gòu)對稱、補償拓撲網(wǎng)絡(luò)易配諧、輸出電流與負載無關(guān)等特性,抗偏移性好,被廣泛應(yīng)用在電動汽車等無線充電系統(tǒng)中[6-7]。
圖1所示為雙LCC型MCR-WPT系統(tǒng)等效電路。圖中:U˙in為直流電源經(jīng)高頻逆變電路后輸出的高頻交流 電壓源,頻率為ω;I˙in為輸入電流;L1為發(fā)射線圈自感;R1為發(fā)射線圈內(nèi)阻;L2為接收線圈自感;R2為接收線圈內(nèi)阻;M為發(fā)射線圈與接收線圈之間的互感值;發(fā)射端補償電感Lf1、發(fā)射端補償電容Cf1與發(fā)射端諧振電容C1構(gòu)成發(fā)射端補償網(wǎng)絡(luò);接收端補償電感Lf2、接收端補償電容Cf2與接收端諧振電容C2構(gòu)成接收端補償網(wǎng)絡(luò);Req為整流環(huán)節(jié)和負載等效電阻。
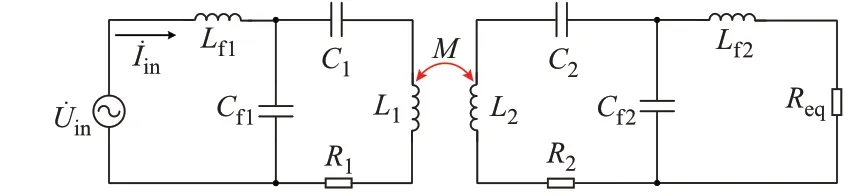
圖1 雙LCC型MCR-WPT系統(tǒng)等效電路Fig.1 Equivalent circuit of double-side LCC type MCR-WPT system
2 系統(tǒng)建模及識別方法
本文針對目前負載與互感識別方法速度慢、精度低等問題,提出了基于TensorFlow神經(jīng)網(wǎng)絡(luò)的負載與互感識別方法,下文以雙LCC型MCR-WPT系統(tǒng)為例進行說明。為了確定TensorFlow神經(jīng)網(wǎng)絡(luò)的負載與互感識別模型的輸入?yún)?shù),需要對雙LCC型MCR-WPT系統(tǒng)進行建模分析。
2.1 系統(tǒng)建模
雙LCC型MCR-WPT系統(tǒng)接收端等效電路模型如附錄A圖A1所示。根據(jù)文獻[19,23]中研究可知,影響系統(tǒng)性能的最主要因素是負載與互感的變化,而接收端補償網(wǎng)絡(luò)、整流二極管等環(huán)節(jié)的電路參數(shù)會隨著溫度的變化而變化,但其變化很小,對系統(tǒng)的性能影響較小。因此,為了減小負載與互感識別的復(fù)雜度,本文將這部分參數(shù)視為常數(shù)。
在附錄A圖A1中,接收線圈拾取到的高頻交流電壓記為U˙2,接收端輸入阻抗記為Z2,其表達式為:

式中:ZCf2=1/(jωCf2)、ZC2=1/(jωC2)、ZLf2=jωLf2、ZL2=jωL2。
在系統(tǒng)完全諧振時,代入式(1)可以得出接收端電路整體阻抗為:

由于對系統(tǒng)進行負載與互感識別主要通過從發(fā)射端檢測相關(guān)參數(shù)來進行分析,因此,為進一步分析負載與互感變化對系統(tǒng)的影響,需要將雙LCC型MCR-WPT系統(tǒng)發(fā)射端電路簡化為附錄A圖A2所示的等效電路。在系統(tǒng)完全諧振時,接收端電路在發(fā)射端電路的反射阻抗Z21可以表示為:

從式(3)可以看出,負載與互感變化對系統(tǒng)的影響具體表現(xiàn)為反映到系統(tǒng)發(fā)射端的反射阻抗的變化。進一步,輸入阻抗Zin與輸入電流有效值Iin有如下關(guān)系成立:

其中發(fā)射端輸入阻抗Zin為:

將式(3)代入式(5)中并取ZLf1=jωLf1、ZL1=jωL1、ZC1=1/(jωC1)、ZCf1=1/(jωCf1),在系統(tǒng)完全諧振時可得:

將式(6)代入式(4)中,可得負載等效電阻Req和互感M與輸入電流Iin的關(guān)系式為:

由式(7)可以看出,系統(tǒng)輸入電流有效值Iin受到負載等效電阻Req和互感值M的影響,故可以通過檢測輸入電流值來進行負載與互感的識別。然而,僅通過輸入電流有效值Iin還不能確定負載與互感的值,因此還需要檢測其他的參數(shù)。
根據(jù)文獻[24]可知,在相同尺寸的條件下圓形線圈的互感值最大,系統(tǒng)抗偏移性能最好,故本文選擇圓形線圈作為系統(tǒng)的耦合機構(gòu)。對于二維平面移動設(shè)備的無線供電系統(tǒng),發(fā)射線圈和接收線圈大多數(shù)是平行的,對于這類無線供電系統(tǒng)其偏移角度變化較小。根據(jù)文獻[25]所做研究工作可知,發(fā)射線圈和接收線圈偏移角度在0°~20°的變化范圍內(nèi),電動汽車無線充電系統(tǒng)的輸出功率和傳輸效率主要受到傳輸距離和偏移距離的影響,受到角度偏移影響較小,因此,本文只考慮兩圓形線圈平行情況下傳輸距離和偏移距離變化影響下的互感識別。根據(jù)上述分析,在發(fā)射線圈和接收線圈所在平面平行的前提下,線圈匝數(shù)和幾何尺寸確定后的互感值M只與傳輸距離h和偏移距離d有關(guān),如附錄A圖A3所示。
互感值M和d、h的關(guān)系可以用隱函數(shù)描述為:

從式(8)可以看出,只要確定了傳輸距離h和偏移距離d就可以確定互感的值,其中傳輸距離h可以采用性價比較高的紅外測距傳感器模塊來進行檢測,但偏移距離的檢測比較困難,需要使用攝像頭、毫米波雷達等傳感器進行檢測,成本較高,且在一些WPT技術(shù)應(yīng)用場合中使用受限。根據(jù)式(7)可知,互感值M的變化會反映到輸入電流有效值Iin的變化上,而輸入電流值因為系統(tǒng)保護或控制本身需要檢測,故只需再額外檢測傳輸距離即能識別互感值。在互感值M確定之后,可以通過式(7)直接計算得到負載等效電阻Req的值,但式(7)是在忽略了補償電感內(nèi)阻等電路參數(shù)的前提下推導(dǎo)得到的,計算得到的結(jié)果識別誤差相對較大,因此,文中考慮利用深度學(xué)習(xí)技術(shù),通過檢測系統(tǒng)輸入電流值和傳輸距離值對互感值M和負載Req進行同時識別,最終得到:

從上述分析可知,要進行負載與互感識別可以通過檢測輸入電流有效值Iin和傳輸距離h來實現(xiàn)。負載與互感的識別問題進一步轉(zhuǎn)化為了求解非線性方程式(9)中函數(shù)f的問題。本文將基于TensorFlow深度學(xué)習(xí)框架,建立神經(jīng)網(wǎng)絡(luò)模型,通過非線性擬合的方式進行函數(shù)f的近似求解。
2.2 TensorFlow神經(jīng)網(wǎng)絡(luò)的負載與互感識別模型及方法
近年來,深度學(xué)習(xí)技術(shù)在學(xué)術(shù)界和工業(yè)界發(fā)展迅速,它在很多傳統(tǒng)的識別任務(wù)如圖像識別、語音識別、文本識別上取得了顯著成效,顯示了其處理復(fù)雜識別任務(wù)的能力,吸引了眾多專家學(xué)者研究其理論與 應(yīng) 用[26]。在MCR-WPT系 統(tǒng) 研 究 領(lǐng) 域 中,文 獻[2]基于機器學(xué)習(xí)技術(shù)在WPT系統(tǒng)傳輸距離變化時,使用前饋神經(jīng)網(wǎng)絡(luò)算法實現(xiàn)了可調(diào)諧振網(wǎng)絡(luò)和多個發(fā)射線圈的自動匹配,實現(xiàn)了最大的系統(tǒng)能量傳輸效率。
TensorFlow是由谷歌(Google)公司開發(fā)的一款開源深度學(xué)習(xí)框架,被廣泛應(yīng)用于機器學(xué)習(xí)領(lǐng)域中。TensorFlow支持跨平臺操作,可以在CPU、GPU以及Android等移動平臺運行,具有良好的擴展性和靈活性,同時支持多種編程語言,如C、C++、Python、Java等編程語言[27],是目前應(yīng)用最為廣泛的深度學(xué)習(xí)框架之一。
基于TensorFlow神經(jīng)網(wǎng)絡(luò)框架,本文提出了雙LCC型MCR-WPT系統(tǒng)的負載與互感識別方法,如圖2(a)所示。負載與互感識別時,將電流值輸入系統(tǒng),傳輸距離值輸入控制器,其中輸入電流值Iin的檢測采用霍爾傳感器實現(xiàn),傳輸距離h的檢測采用性價比較高的紅外測距傳感器模塊來實現(xiàn),控制器調(diào)用TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型,根據(jù)輸入?yún)?shù)進行實時運算完成負載與互感識別。TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型通過離線建立并訓(xùn)練完成后,裝載到微控制器中進行在線識別。TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型建立步驟如圖2(b)所示。
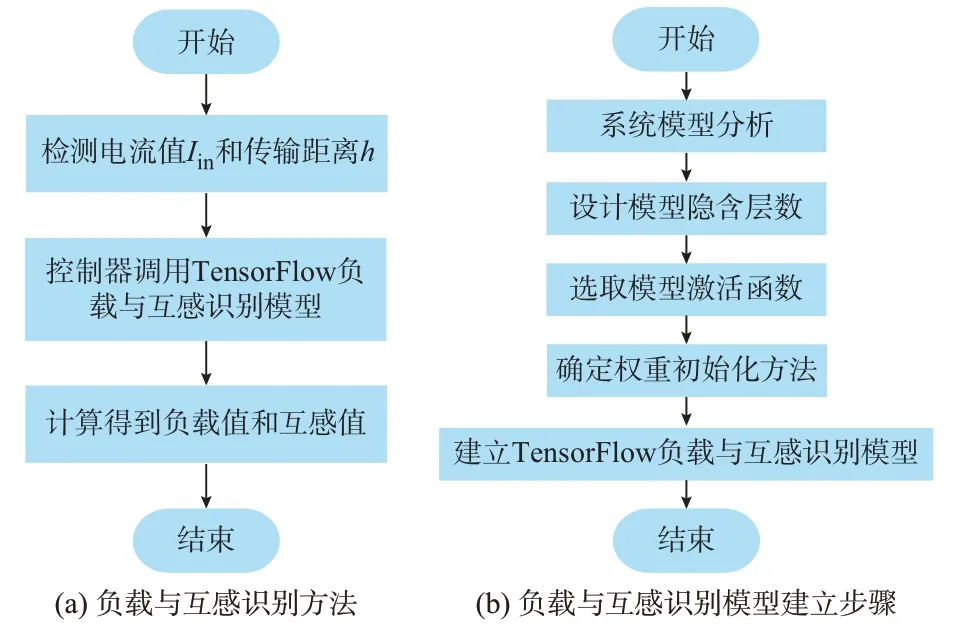
圖2 基于TensorFlow神經(jīng)網(wǎng)絡(luò)的負載與互感識別方法Fig.2 Load and mutual inductance identification method based on TensorFlow neural network
根據(jù)式(7)至式(9),確定將檢測系統(tǒng)的輸入電流Iin和h作為負載與互感識別模型的輸入?yún)?shù),基于TensorFlow框架建立了一個5層的負載與互感識別全連接神經(jīng)網(wǎng)絡(luò)模型,如圖3所示。在負載與互感識別神經(jīng)網(wǎng)絡(luò)模型中,隱藏層的非線性激活函數(shù)使用TensorFlow框架中的Sigmoid激活函數(shù)。
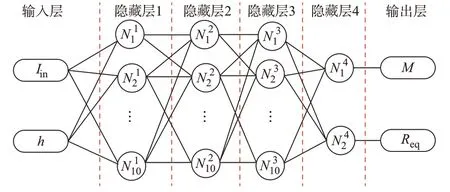
圖3 負載與互感識別神經(jīng)網(wǎng)絡(luò)模型Fig.3 Neural network model of load and mutual inductance identification

式中:T1為隱藏層1的中間變量矩陣;[h Iin]為由MCR-WPT系統(tǒng)的線圈間傳輸距離和輸入電流值構(gòu)成的輸入矩陣;w1和b1分別為輸入層與隱藏層1之間的權(quán)重矩陣和偏置矩陣,即
將中間變量矩陣T1中的每個元素代入Simgoid激活函數(shù)非線性化后可得隱藏層1的輸出矩陣N1:

式中:T1i為隱藏層1的中間變量矩陣T1的第1行第i個元素;N1i為隱藏層1的輸出矩陣N1的第1行第i個元素。
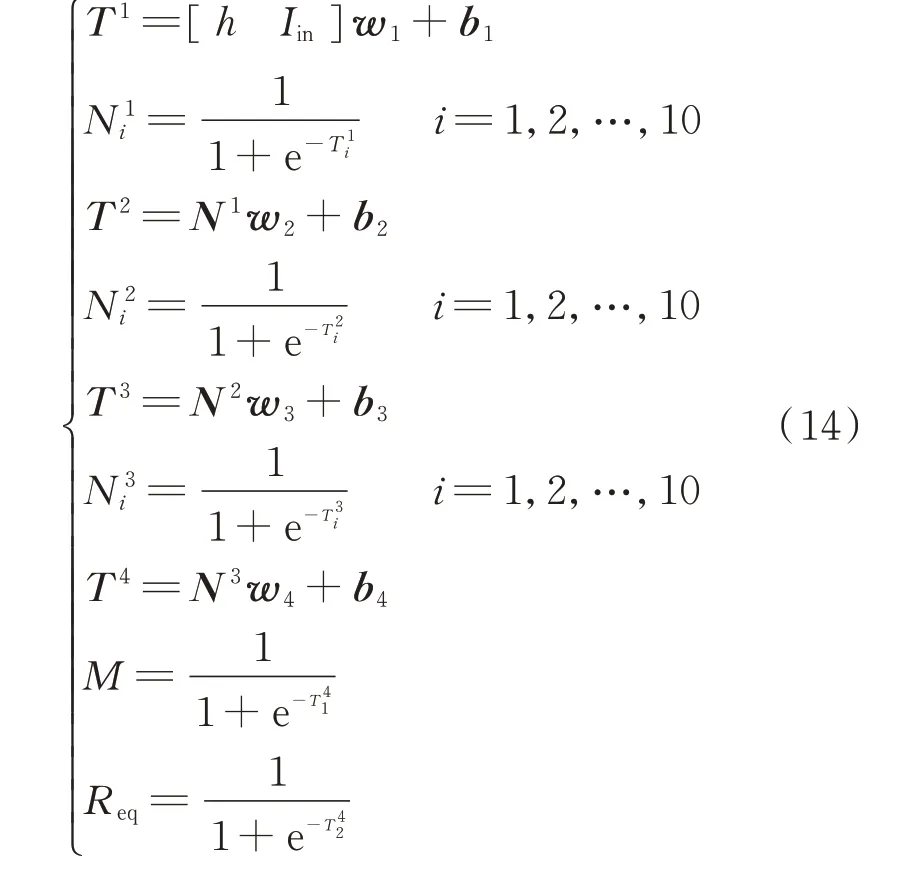
依此類推,可得T2、N2、T3、N3、T4、N4的表達式,進而得到互感值與負載為:

2.3 TensorFlow神經(jīng)網(wǎng)絡(luò)的負載與互感識別模型訓(xùn)練方法
模型建立后,為了確定權(quán)重矩陣和偏置矩陣w1、b1、w2、b2、w3、b3、w4、b4的值,需要使用訓(xùn)練數(shù)據(jù)集對模型進行離線訓(xùn)練,使得TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別的精度達到期望值。為達到上述目的,可以通過設(shè)置不同的偏移距離d和傳輸距離h得到互感值M的訓(xùn)練數(shù)據(jù)集,通過將訓(xùn)練數(shù)據(jù)輸入模型進行離線訓(xùn)練,訓(xùn)練完成后將識別模型導(dǎo)入控制器進行在線識別。
本文采用仿真軟件建立系統(tǒng)仿真模型的方式獲取上述模型訓(xùn)練所需數(shù)據(jù),在COMSOL多物理場仿真軟件中建立了耦合機構(gòu)仿真模型如附錄A圖A4所示。根據(jù)橫向項目實際需求,耦合機構(gòu)中沒有加入磁芯,仿真參數(shù)如附錄A表A1所示。
通過在COMSOL多物理場仿真軟件中進行耦合機構(gòu)仿真,得到發(fā)射線圈和接收線圈自感均為534μH。在仿真中,通過設(shè)置不同的偏移距離d和傳輸距離h得到互感值M,進行參數(shù)化掃描仿真后獲取了483組h、d和M的數(shù)據(jù)集,如圖4所示。從圖中可以看出,互感值關(guān)于水平位置偏移對稱變化,且當(dāng)偏移距離不變時,互感值隨著傳輸距離的增大而減小。
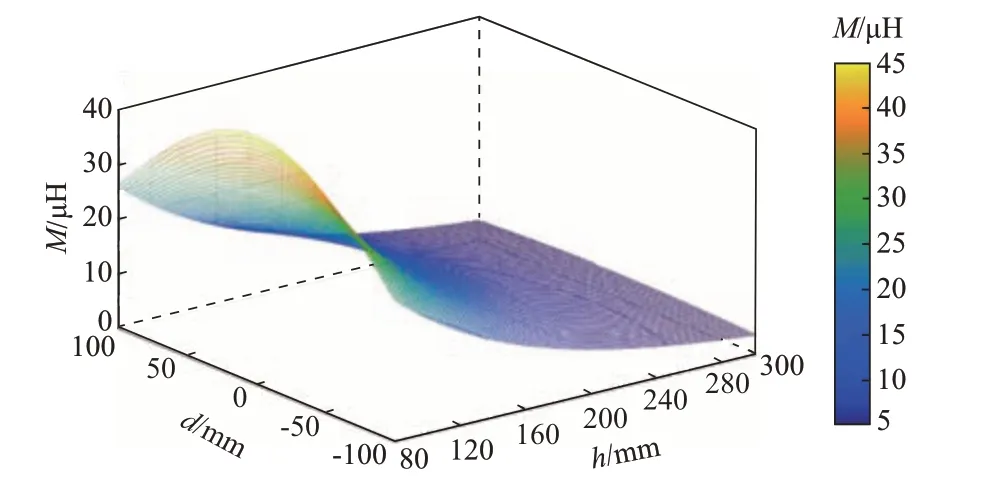
圖4 d、h與M間的三維曲面圖Fig.4 Three-dimensional surface diagram between d,h and M
獲得傳輸距離h和互感值M的耦合機構(gòu)仿真數(shù)據(jù)集后,在Simulink中建立了雙LCC型MCR-WPT仿真模型,單次仿真時間設(shè)置為0.02 s,此時系統(tǒng)已經(jīng)穩(wěn)態(tài)運行。模型中的傳輸距離h和互感值M的設(shè)置使用COMSOL軟件仿真的h和M數(shù)據(jù)輸入,模型中的其余參數(shù)設(shè)置如下:系統(tǒng)頻率f=80 kHz、L1=L2=534μH、C1=C2=8.48 nF、Lf1=Lf2=67μH、Cf1=Cf2=59 nF、Req=10~100Ω。
通過編寫M文件進行自動仿真,每改變一次傳輸距離h和負載等效電阻Req,得到系統(tǒng)輸入電流值Iin和互感值M,從而獲取了2 400組仿真模型數(shù)據(jù)。
為了提高TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型的泛化能力,隨機選取其中2 160組數(shù)據(jù)作為訓(xùn)練集、240組數(shù)據(jù)作為測試集,測試集不參與模型訓(xùn)練,僅用于測試模型識別效果,以檢驗?zāi)P偷姆夯芰ΑMㄟ^將訓(xùn)練集數(shù)據(jù)輸入模型,根據(jù)訓(xùn)練誤差值使用TensorFlow優(yōu)化器AdamOptimizer優(yōu)化模型中的參數(shù),直至識別誤差值降至設(shè)定值。如附錄A圖A5所示,經(jīng)過10 000次訓(xùn)練后,模型識別誤差值已經(jīng)降至很小,此時訓(xùn)練集負載Req識別精度為98.2%,互感值M識別精度為98.3%,在測試數(shù)據(jù)集中負載Req識別精度為98.0%,互感值M識別精度達到98.5%,至此,TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型完成訓(xùn)練。
模型訓(xùn)練完成后,導(dǎo)出權(quán)重矩陣和偏置矩陣w1、b1、w2、b2、w3、b3、w4、b4的值,在線識別負載與互感時,通過檢測系統(tǒng)輸入電流值Iin和傳輸距離h,將上述導(dǎo)出的權(quán)重矩陣和偏置矩陣在微型控制器中進行如式(14)所示的運算,得到負載與互感值。
3 仿真分析
為驗證所提識別方法的可行性和識別效果,本文 基 于 雙LCC型MCR-WPT系 統(tǒng) 和 上 述TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型建立了如附錄A圖A6所示的Simulink仿真驗證模型。該模型主要由以下幾個部分組成:①雙LCC型MCRWPT系統(tǒng)主電路;②逆變電路信號發(fā)生模塊;③發(fā)射端LCC拓撲網(wǎng)絡(luò)輸入電流值Iin和傳輸距離h采集單元,仿真中電流值Iin通過檢測模塊實時檢測,傳輸距離h通過編程自動輸入改變;④識別模型算法單元。雙LCC型MCR-WPT系統(tǒng)仿真參數(shù)與2.3節(jié)系統(tǒng)仿真模型一致。
在仿真驗證模型中,通過編寫M語言將基于TensorFlow神經(jīng)網(wǎng)絡(luò)的負載與互感識別模型算法(式(14))封裝在附錄A圖A6中的識別模型算法單元中,識別算法一次運算耗時約為25μs,負載與互感仿真參數(shù)設(shè)置如表1所示,其中偏移距離為0 mm時,發(fā)射線圈與接收線圈中心對齊。互感設(shè)定值M通過傳輸距離h和偏移距離d變化而設(shè)定,傳輸距離h設(shè)定值在80~300 mm變化,偏移距離d設(shè)定值在0~100 mm變化,進而使得互感值M設(shè)定值在45.40~4.41μH變化。負載Req設(shè)定值則直接設(shè)定為10~100Ω變化。
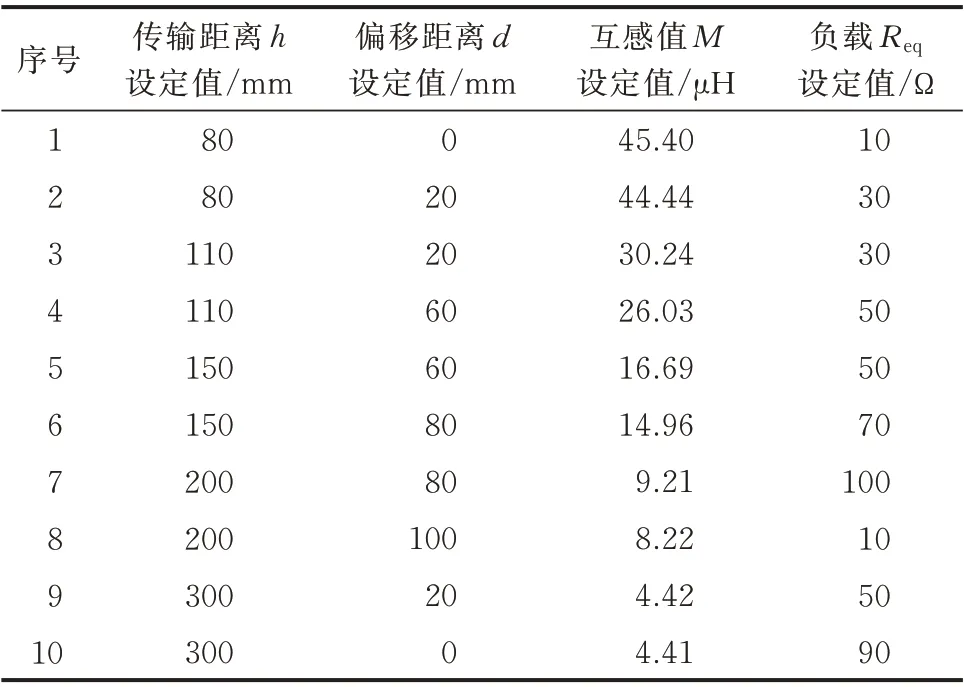
表1 負載與互感仿真參數(shù)Table 1 Simulation parameters of load and mutual inductance
參數(shù)設(shè)置完成后,運行仿真模型,通過調(diào)用TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型可以在線同時識別負載與互感值,識別結(jié)果如圖5所示。
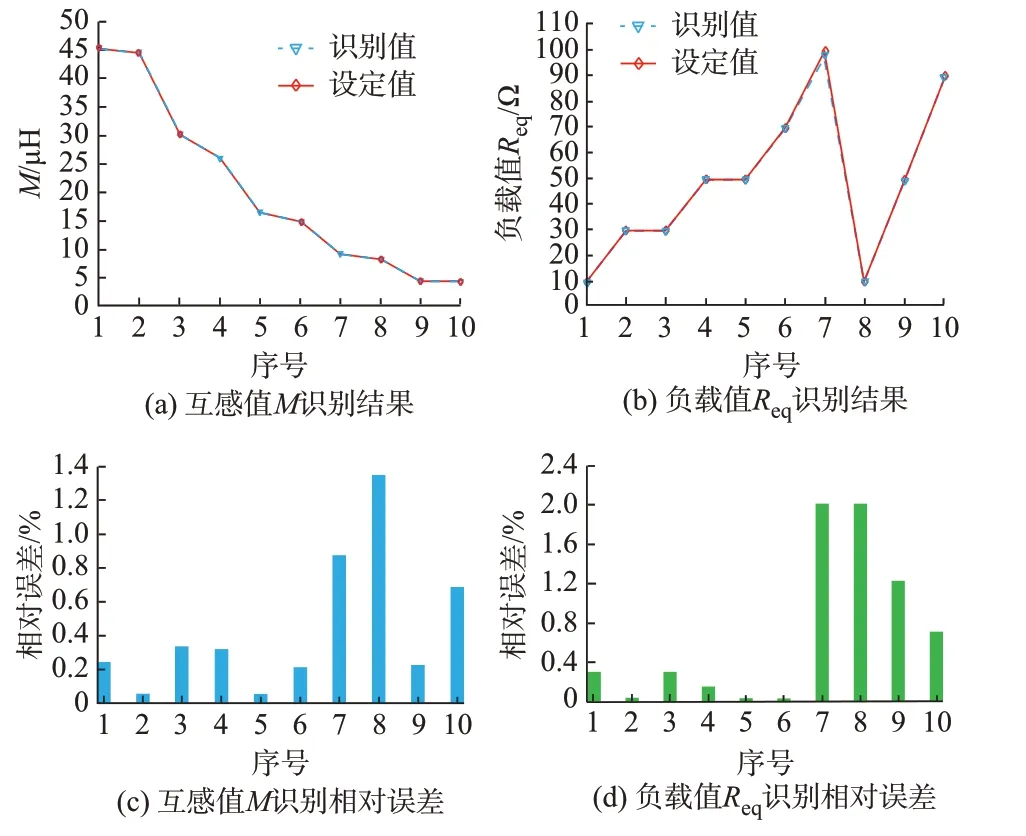
圖5 負載與互感識別仿真結(jié)果Fig.5 Simulation results of load and mutual inductance identification
分析負載與互感識別仿真結(jié)果可以看出,互感值在45.40~4.41μH變化時,互感值識別最大相對誤差為1.34%;負載值在10~100Ω變化時,負載值識別相對最大誤差為2.0%,負載與互感識別值與設(shè)定值非常接近,識別精度較高、適應(yīng)范圍較大。
4 實驗驗證
為進一步驗證所提識別方法,搭建了雙LCC型MCR-WPT系統(tǒng)實驗裝置如附錄A圖A7所示,系統(tǒng)實驗參數(shù)與仿真參數(shù)一致。系統(tǒng)控制器采用了性價比較高的STM32F103VCT6微型處理器,處理器最高工作頻率為72 MHz,將離線訓(xùn)練完成的負載與互感識別模型編程實現(xiàn)后下載到控制器中。
實驗中,通過切換負載以及調(diào)節(jié)發(fā)射線圈和接收線圈之間的相對位置來實現(xiàn)負載及互感的變化,通過霍爾傳感器檢測系統(tǒng)輸入電流,經(jīng)過處理后得到有效值Iin,通過GP2Y0A21YK0F紅外測距傳感器檢測傳輸距離h,在微控制器中調(diào)用TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型。從檢測電流值和傳輸距離值開始到通過TensorFlow神經(jīng)網(wǎng)絡(luò)的負載與互感識別模型計算出負載和互感值結(jié)束的時間為單次負載和互感識別時間,通過處理器的定時器模塊(計時基數(shù)為1μs)進行測量得到單次識別時間約為0.76 ms。從單次識別時間可以看出,本文的負載與互感識別時間并不是很短,其主要原因是本文實驗中選用的微控制器處理速度還不是很快,如果采用高速處理器,則負載與互感識別時間還能進一步縮短。16次負載與互感識別實驗結(jié)果如表2所示。
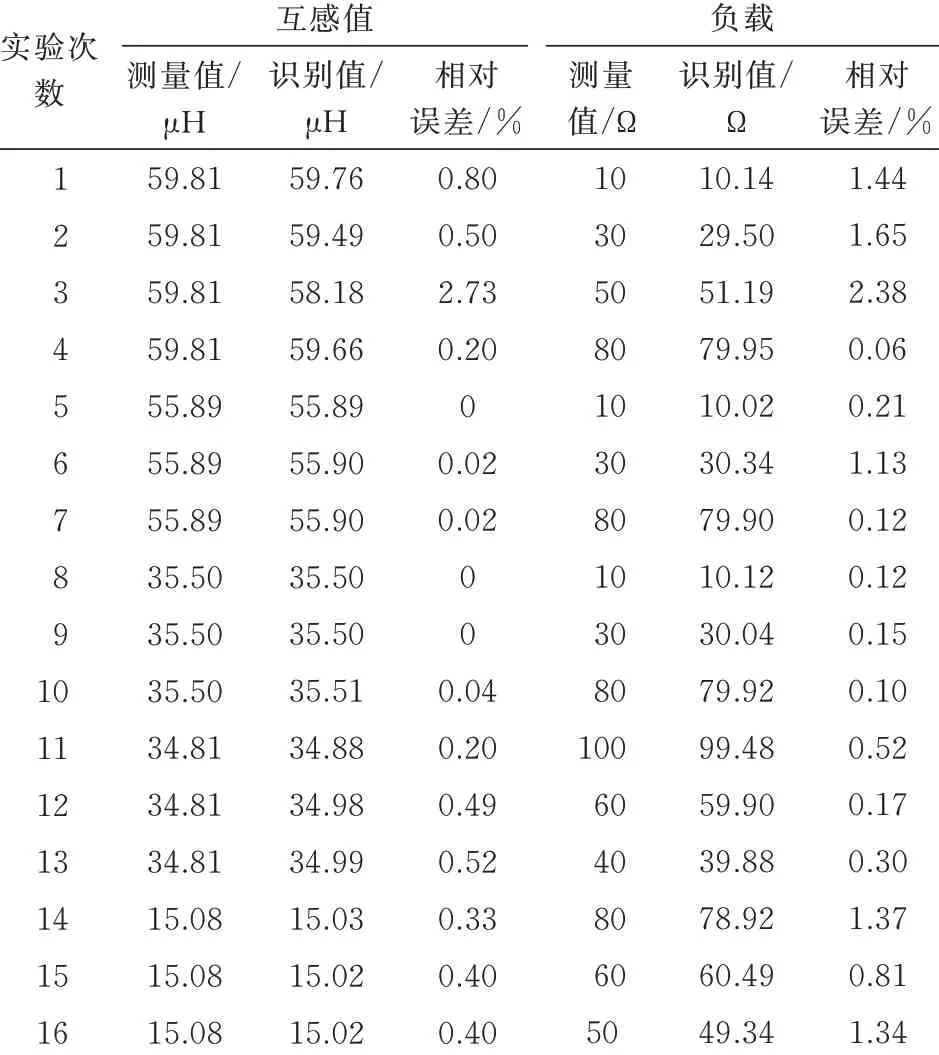
表2 LCC型MCR-WPT系統(tǒng)負載與互感識別實驗結(jié)果Table 2 Experimental results of load and mutual inductance identification of LCC type MCR-WPT system
在1~4次實驗中,傳輸距離設(shè)置為80 mm,偏移距離設(shè)置為0 mm,互感采用LCR測試儀IM3536測量,測量值為59.81μH,負載使用IT8813電子負載分別設(shè)定為10、30、50、80Ω。在此條件下調(diào)用負載與互感識別模型進行識別,互感識別最大相對誤差為2.73%,負載識別最大相對誤差為2.38%。
在5~7次實驗中,保持傳輸距離不變,改變線圈相對位置使得偏移距離為20 mm,互感測量值為55.89μH,負載分別設(shè)定為10、30、80Ω。通過調(diào)用負載與互感識別模型得到互感識別最大誤差為0.02%,負載識別最大誤差為1.13%。
進一步調(diào)整線圈相對位置,增加傳輸距離至100、110、150 mm并設(shè)定相應(yīng)的負載值完成了8~16次負載與互感識別實驗。互感識別最大相對誤差為0.52%,負載識別相對最大誤差為1.37%。
從上述實驗結(jié)果可以看出,本文設(shè)置互感值在15.08~59.81μH變化時,互感識別最大相對誤差為2.73%;負載在10~100Ω變化時,負載識別最大相對誤差為2.38%,與仿真結(jié)果基本一致。相較于文獻[22]中的單一參數(shù)識別,互感識別相對誤差為5.0%,本文實現(xiàn)了負載與互感在線同時識別,且識別精度有較大提升;在文獻[18-21]負載與互感雙參數(shù)識別方法研究中,相對誤差為7.4%,而本文負載與互感識別最大相對誤差降低到了2.73%,且識別算法中無迭代運算,識別速度快,能適應(yīng)更大的負載與互感變化范圍,更有利于系統(tǒng)的實時控制和提高控制性能。
5 結(jié)語
本文針對MCR-WPT系統(tǒng)的負載與互感識別速度慢、精度低等問題,提出了一種基于TensorFlow神經(jīng)網(wǎng)絡(luò)的雙LCC型MCR-WPT系統(tǒng)負載與互感識別方法。該方法不需要檢測偏移距離d,而是離線建立了TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型,通過設(shè)置不同的偏移距離d和傳輸距離h得到互感M的訓(xùn)練數(shù)據(jù),再將訓(xùn)練數(shù)據(jù)輸入模型進行離線訓(xùn)練,訓(xùn)練完成后將識別模型導(dǎo)入控制器進行在線識別。在線識別時,只需要檢測輸入電流值Iin和傳輸距離h,調(diào)用識別模型計算得到負載與互感值;通過系統(tǒng)建模分析,給出了負載與互感識別模型設(shè)計的方法和步驟,通過仿真驗證了該方法的可行性。在實驗中,通過調(diào)整線圈相對位置和負載電阻改變系統(tǒng)互感和負載大小,在微型控制器中調(diào)用TensorFlow神經(jīng)網(wǎng)絡(luò)負載與互感識別模型進行在線識別。仿真和實驗結(jié)果表明,本文提出的基于TensorFlow神經(jīng)網(wǎng)絡(luò)的負載與互感識別方法比以往的負載與互感識別方法精度有較大提升,識別速度也有所提升,并能適應(yīng)較大的負載與互感變化范圍,且易于實現(xiàn)、成本較低,更有利于工程推廣應(yīng)用。
需要指出的是,本文所提出的方法主要針對無磁芯的耦合機構(gòu)。針對耦合機構(gòu)有磁芯的MCRWPT系統(tǒng)的負載與互感識別方法值得進一步研究。
附錄見本刊網(wǎng)絡(luò)版(http://www.aeps-info.com/aeps/ch/index.aspx),掃英文摘要后二維碼可以閱讀網(wǎng)絡(luò)全文。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
