臺車干擾加速度下的ACNS觸發(fā)算法可靠性研究
2021-09-14 02:45:22呂羽競張玉辰
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2021年8期
關(guān)鍵詞:有限元
陸 穎,呂羽競,張玉辰
(江蘇大學(xué) 汽車與交通工程學(xué)院, 江蘇 鎮(zhèn)江 212013)
效率和準(zhǔn)確性是ACNS可靠性主要的衡量指標(biāo)[8]。對于以加速度信號觸發(fā)的ACNS,其觸發(fā)算法的可靠性直接影響到ACNS的可靠性。在多種加速度信號觸發(fā)算法中,加速度峰值法只需要設(shè)置一個觸發(fā)閾值,當(dāng)檢測到車身加速度峰值超過觸發(fā)閾值時就對外呼救,具有算法簡單、效率高等優(yōu)點,因此是工程上應(yīng)用較多的一種。但是這一算法準(zhǔn)確性不高,誤觸發(fā)的概率比較大。從國內(nèi)外的實踐來看,采用加速度峰值法的ACNS往往和以安全氣囊點火信號觸發(fā)的ACNS配合使用,形成雙通道式(dual-channel notification)ACNS,從而提升車輛的報警效率,典型的如安吉星(OnStar)系統(tǒng)[9]。
雖然以加速度峰值法觸發(fā)的ACNS一般不單獨使用,但該算法的可靠性仍具有研究意義,這是因為ACNS的頻繁誤觸發(fā)報警會分散駕駛員的注意力,如果駕駛員不取消呼救,還會導(dǎo)致救援活動的開展,造成救援資源的浪費。觸發(fā)閾值的設(shè)定直接影響到加速度峰值法的可靠性。目前,觸發(fā)閾值的設(shè)定主要通過顛簸道路、緊急制動試驗得出。Xiao W等[10]考慮了緊急制動和過減速坎后,將觸發(fā)閾值設(shè)定為2g(1g=9.8 m/s2)。賈豐源[11]考慮了車輛通過不同高度的路障的情況,將ACNS運(yùn)行的閾值設(shè)為6g。葛如海等[12]分析了車輛在卵石路、搓板路以及石階上的車身加速度,將觸發(fā)閾值設(shè)為5g~16g。由此可見,不同的研究文獻(xiàn)中對這一閾值的設(shè)定差別很大。
在車輛行駛過程中,由于動力裝置振動、路面顛簸等會產(chǎn)生車輛振動[13],由此引起的干擾加速度會影響到加速度峰值法對碰撞事故的識別。臺車碰撞試驗是進(jìn)行ACNS終端可靠性檢測的關(guān)鍵步驟[11,14]。由于臺車的晃動、橄欖頭中心未對準(zhǔn)吸能管中心等原因,臺車在碰撞初始階段受到了來自其他方向的力,會使碰撞開始時加速度信號有明顯的大幅度振蕩,使單一觸發(fā)閾值的ACNS終端可能出現(xiàn)誤觸發(fā)現(xiàn)象。因此,研究臺車干擾加速度下的ACNS觸發(fā)算法的可靠性對于研究ACNS觸發(fā)算法在顛簸路面行駛、動力裝置振動等情況下的可靠性具有重要的借鑒意義。
國內(nèi)外關(guān)于臺車干擾加速度對ACNS觸發(fā)算法影響的研究目前還較為少見,本文首先通過有限元軟件LS-DYNA建立臺車碰撞仿真模型,并通過試驗驗證仿真模型的準(zhǔn)確性。然后,分析由臺車振動引起的干擾加速度,并對其進(jìn)行正態(tài)性檢驗。繼而,在仿真加速度的基礎(chǔ)上,加入服從正態(tài)分布的干擾加速度,統(tǒng)計加入干擾加速度前后ACNS誤觸發(fā)、漏觸發(fā)的次數(shù),并分析干擾加速度正態(tài)分布參數(shù)對觸發(fā)算法的影響,對觸發(fā)算法的可靠性進(jìn)行研究。最后,通過ACNS終端試驗,驗證干擾加速度下觸發(fā)算法的可靠性。
1 臺車碰撞有限元仿真
ACNS觸發(fā)算法的設(shè)計需要進(jìn)行大量的實車或臺車碰撞試驗。然而,隨著計算機(jī)性能的提高以及仿真技術(shù)的日益成熟,前期開發(fā)可以用有限元仿真代替臺車碰撞試驗。
1.1 有限元模型的建立
中國某試驗場DAPG-QJ-MNPZ型臺車碰撞試驗系統(tǒng)如圖1所示,主要應(yīng)用于汽車安全帶動態(tài)性能試驗、汽車座椅動態(tài)強(qiáng)度試驗等安全部件法規(guī)試驗。

圖1 臺車碰撞試驗系統(tǒng)場景圖
現(xiàn)根據(jù)臺車碰撞試驗系統(tǒng)實際尺寸建立如圖2所示的有限元模型,包括臺車、軌道、緩沖吸能裝置、壁障等。其中,臺車的減速運(yùn)動主要通過緩沖吸能裝置實現(xiàn),裝在臺車前部的橄欖頭插入聚氨酯吸能管,引起吸能管的彈塑性形變,從而起到減速停車的作用[15-16]。因此,作為有限元分析的主要形變部件,緩沖吸能裝置的網(wǎng)格劃分較密,如圖3所示。另外,聚氨酯吸能管采用聚氨酯材料,其余部件均采用45號鋼,材料主要參數(shù)如表1所示。
納入標(biāo)準(zhǔn):①3歲≤年齡≤12歲;②符合中華眼科學(xué)會斜視弱視學(xué)組(2011)中的弱視診斷標(biāo)準(zhǔn)[3]:視覺發(fā)育期由于單眼斜視、未矯正的屈光參差和高度屈光不正及形覺剝奪引起的單眼或雙眼最佳矯正視力(BCVA)低于相應(yīng)年齡的視力(4~5歲≤0.5,6~12歲≤0.7),或雙眼視力相差2行以上;③診斷為屈光參差性弱視[需具備相關(guān)危險因素如雙眼遠(yuǎn)視性球鏡度數(shù)相差1.50 D和(或)柱鏡度數(shù)相差1.00 D[3]];④能配合本研究的各項檢查;⑤未戴鏡矯正,且以往未進(jìn)行過弱視訓(xùn)練;⑥患兒監(jiān)護(hù)人自愿簽署知情同意書。
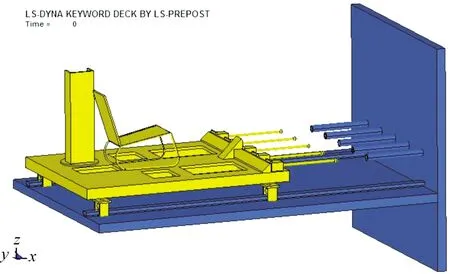
圖2 臺車碰撞試驗系統(tǒng)有限元模型示意圖

圖3 緩沖吸能裝置網(wǎng)格劃分示意圖
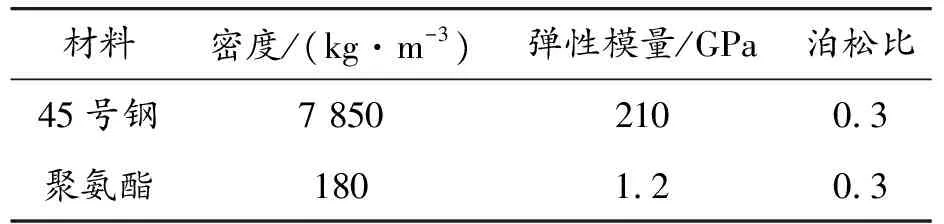
表1 有限元模型材料的主要參數(shù)
1.2 有限元模型的驗證
參考?xì)W洲ECE R94對安全氣囊的點火要求,將20 km/h作為ACNS觸發(fā)的臨界車速。以20 km/h速度進(jìn)行臺車碰撞試驗和仿真碰撞試驗,得到的碰撞加速度曲線如圖4。可以發(fā)現(xiàn),試驗曲線存在明顯的大幅度振蕩,一方面臺車與軌道有摩擦,另一方面在碰撞過程中臺車和軌道之間產(chǎn)生振動;而仿真模型未能考慮臺車振動加速度,并且臺車與軌道的摩擦系數(shù)設(shè)置為定值,因此加速度曲線不存在較大的波動。
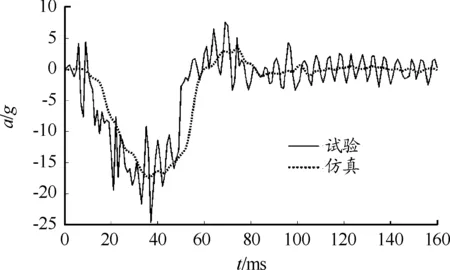
圖4 仿真與試驗臺車碰撞加速度曲線(20 km/h)
圖5為經(jīng)過濾波處理后的20 km/h時仿真與試驗臺車碰撞加速度曲線。所用的濾波器為cfc60,該濾波器在車輛碰撞相關(guān)研究中經(jīng)常使用[17]。
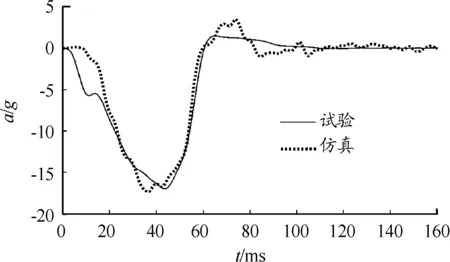
圖5 濾波后仿真與試驗臺車碰撞加速度曲線(20 km/h)
仿真中臺車在37 ms時達(dá)到加速度峰值-17.27g,并在60 ms時停止運(yùn)動;試驗中臺車在43 ms時達(dá)到加速度峰值-16.93g,并在61 ms時停止運(yùn)動。從加速度曲線軌跡、加速度峰值出現(xiàn)時間、加速度峰值、臺車停止運(yùn)動時間這些方面考慮,仿真與試驗加速度曲線均有較好的吻合度,因此該有限元模型可以用于后續(xù)ACNS觸發(fā)算法的可靠性研究[18]。
2 干擾加速度正態(tài)檢驗
圖6~8是汽車通過不同路面的加速度波形曲線[19]。其中,圖6是汽車以60 km/h通過搓板路的加速度波形曲線,圖7是汽車以50 km/h通過110 mm臺階的加速度波形曲線,圖8是汽車以50 km/h緊急制動的加速度波形曲線。
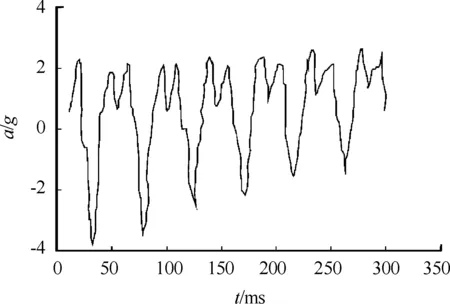
圖6 汽車以60 km/h通過搓板路的加速度波形曲線
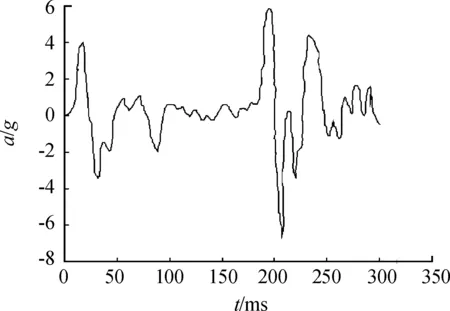
圖7 汽車以50 km/h通過110 mm臺階的加速度波形曲線
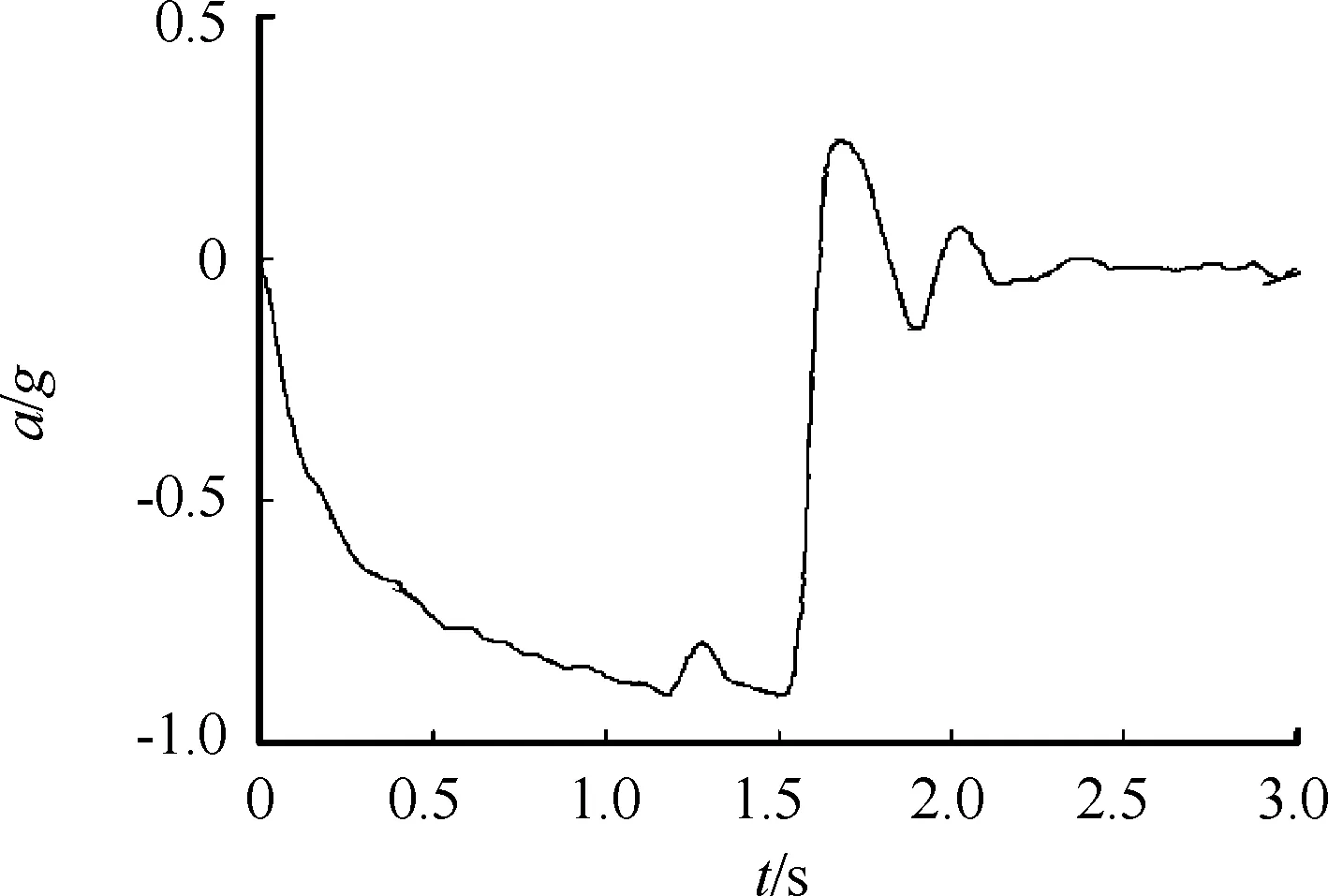
圖8 汽車以50 km/h緊急制動的加速度波形曲線
而臺車在運(yùn)動過程中,由于牽引力不恒定、與軌道間摩擦系數(shù)不斷變化等原因,自身會不斷前后振動,產(chǎn)生影響觸發(fā)算法可靠性的干擾加速度。
由于實際路況復(fù)雜,通過圖6~8可知,加速度的最大區(qū)域在-6g~6g。圖9為臺車碰撞試驗濾出的干擾加速度曲線。可以看出,臺車干擾加速度覆蓋了這幾種路面工況下的可能發(fā)生的加速度區(qū)間。
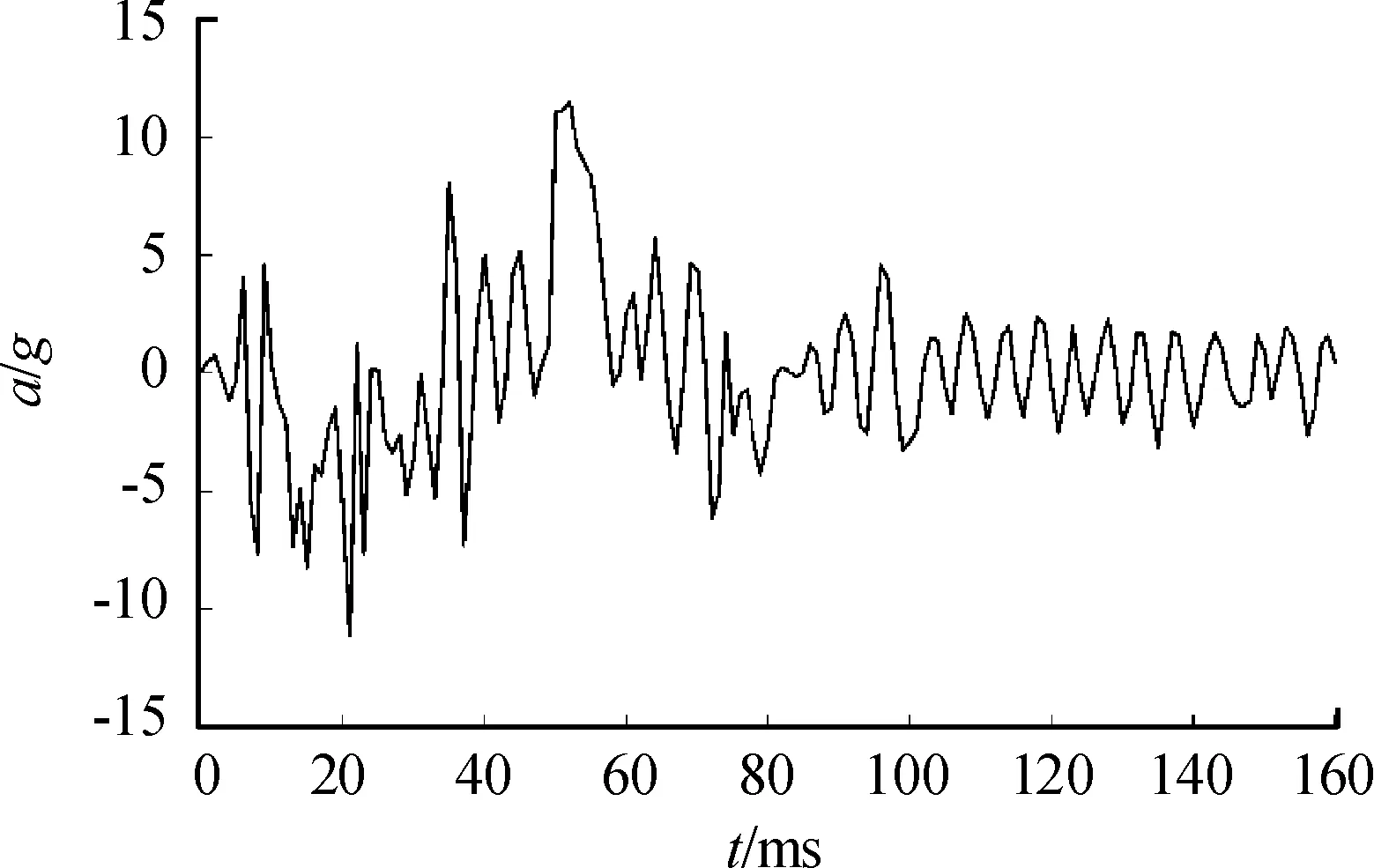
圖9 干擾加速度
由圖9可發(fā)現(xiàn),加速度信號沿著x軸上下波動,實際表現(xiàn)為臺車的前后振動。另外,曲線在0~60 ms時幅值稍大,這是由于臺車前部橄欖頭與吸能管相接觸時產(chǎn)生劇烈振動造成的。對干擾加速度進(jìn)行正態(tài)分布擬合,擬合曲線如圖10,正態(tài)檢驗分析報表如表2。
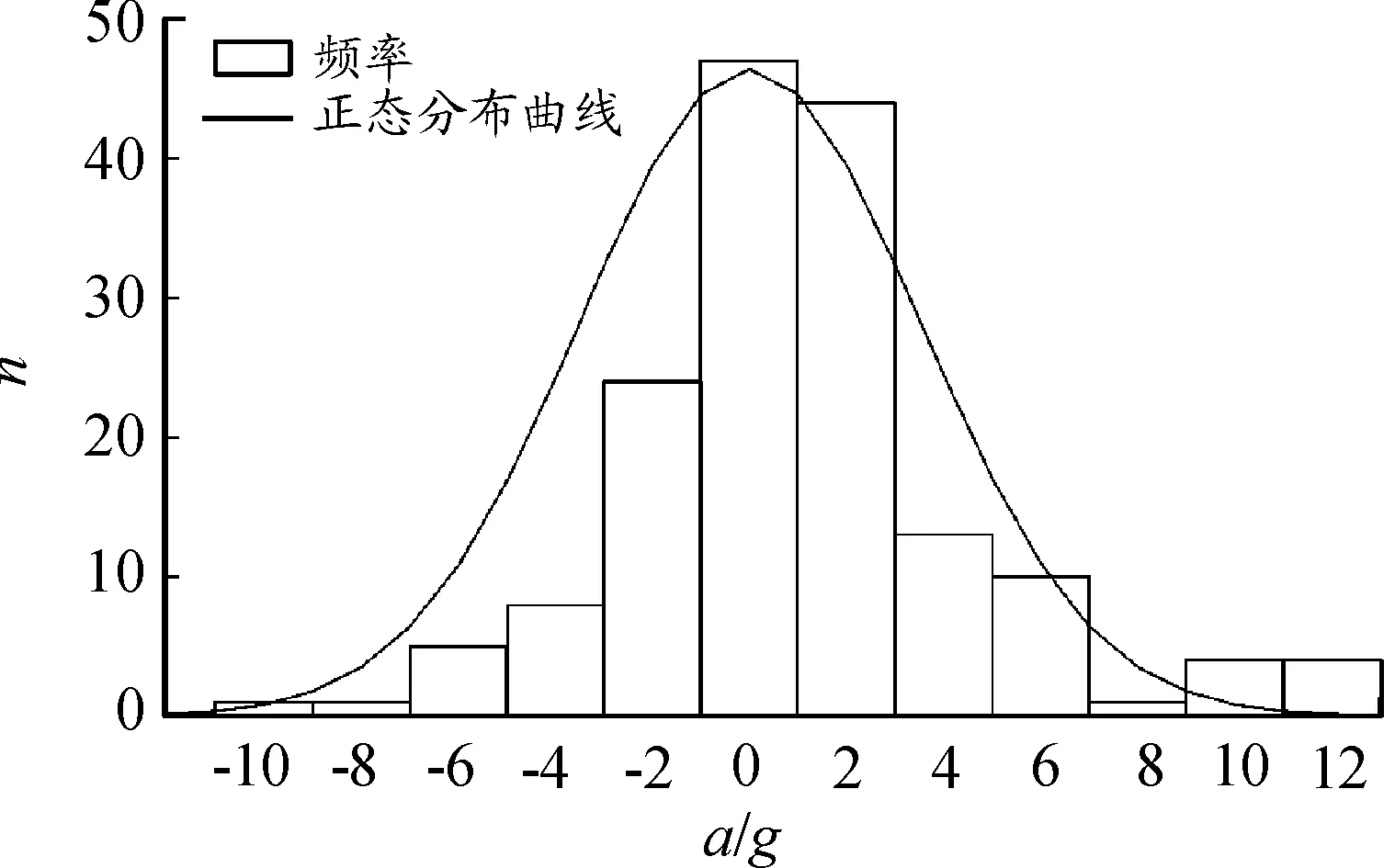
圖10 干擾加速度正態(tài)分布擬合曲線
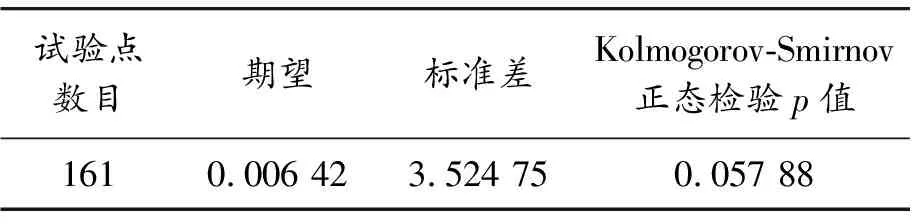
表2 正態(tài)檢驗分析
由表2可知,Kolmogorov-Smirnov正態(tài)檢驗p>0.05,說明干擾加速度服從正態(tài)分布[20],且期望為0.006 42,標(biāo)準(zhǔn)差為3.524 75。
3 觸發(fā)算法可靠性分析
3.1 可靠性分析
加速度峰值法以加速度峰值作為評估參數(shù),判斷系統(tǒng)是否需要發(fā)出呼救信號。加速度信號在碰撞過程中變化非常快,容易受到車輛振動和路面不平的干擾。雖然,在實際應(yīng)用中可以通過濾波處理減小干擾加速度的影響,但其仍會不可避免地影響加速度峰值,造成系統(tǒng)誤觸發(fā)或漏觸發(fā)。
將有限元仿真20 km/h臺車碰撞加速度峰值作為觸發(fā)閾值,設(shè)定為-17.27g。在臺車碰撞初速度15~25 km/h,間隔0.5 km/h,進(jìn)行有限元仿真。無干擾加速度時不同碰撞初速度下的加速度峰值如圖11所示。
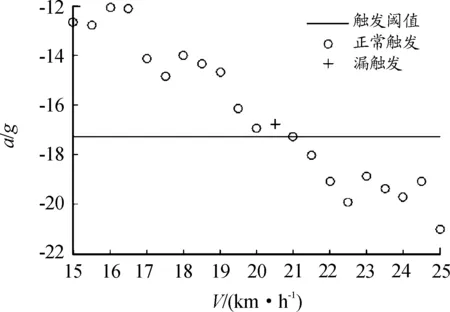
圖11 無干擾加速度時不同碰撞初速度下的加速度峰值圖
從圖11可知,僅在20.5 km/h時發(fā)生漏觸發(fā)情況。同時,可以看出,隨著臺車碰撞初速度的增大,加速度峰值有增大的趨勢。因此,在沒有干擾加速度影響時,觸發(fā)算法具有良好的可靠性。
為了研究干擾加速度對觸發(fā)算法的影響,通過Matlab R2014隨機(jī)生成21組期望為0.006 42g、標(biāo)準(zhǔn)差為3.524 75g的正態(tài)分布數(shù)據(jù),并將其分別輸入到仿真的臺車不同碰撞初速度下的加速度信號中。圖12為有干擾加速度時不同碰撞初速度下的加速度峰值圖。
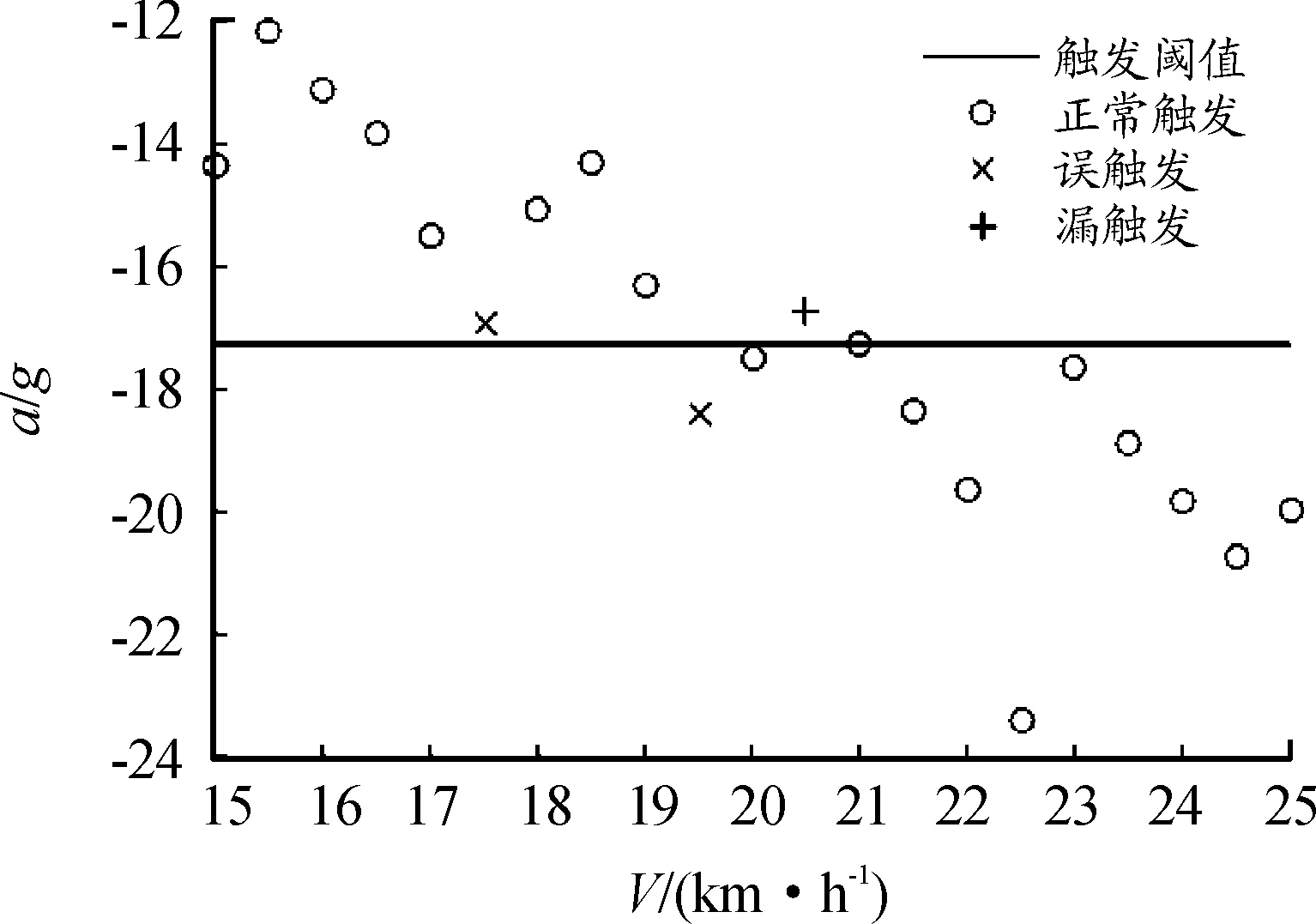
圖12 有干擾加速度時不同碰撞初速度下的加速度峰值圖
可以看出,考慮了干擾加速度之后,在17.5 h、19.5 km/h時發(fā)生誤觸發(fā),在20.5 km/h時發(fā)生漏觸發(fā)情況,相比于無干擾加速度時,錯誤觸發(fā)增多。這是由于濾波處理不能完全濾去干擾加速度,不可避免地影響到加速度峰值,從而降低了觸發(fā)算法的可靠性。
3.2 參數(shù)敏感性分析
由于臺車車型、碰撞初速度、臺車軌道表面狀況的不同,干擾加速度的期望和標(biāo)準(zhǔn)差也不盡相同。因此,有必要研究干擾加速度正態(tài)分布參數(shù)對觸發(fā)算法的影響。
設(shè)置干擾加速度的標(biāo)準(zhǔn)差為3.524 75g,期望范圍為-2g~2g、間隔為0.5g,分別輸入到仿真的臺車不同碰撞初速度下的加速度信號中,統(tǒng)計觸發(fā)算法誤觸發(fā)、漏觸發(fā)的次數(shù)。圖13為不同期望時觸發(fā)算法誤觸發(fā)、漏觸發(fā)次數(shù)曲線,可以發(fā)現(xiàn)干擾加速度期望為負(fù)時,較易出現(xiàn)誤觸發(fā);期望為正時,漏觸發(fā)次數(shù)明顯多于誤觸發(fā)次數(shù)。因為期望為負(fù)時,相當(dāng)于整體上給臺車提供了同向加速度,導(dǎo)致加速度峰值變大,更易出現(xiàn)誤觸發(fā);期望為正時,加速度峰值變小,從而發(fā)生漏觸發(fā)。
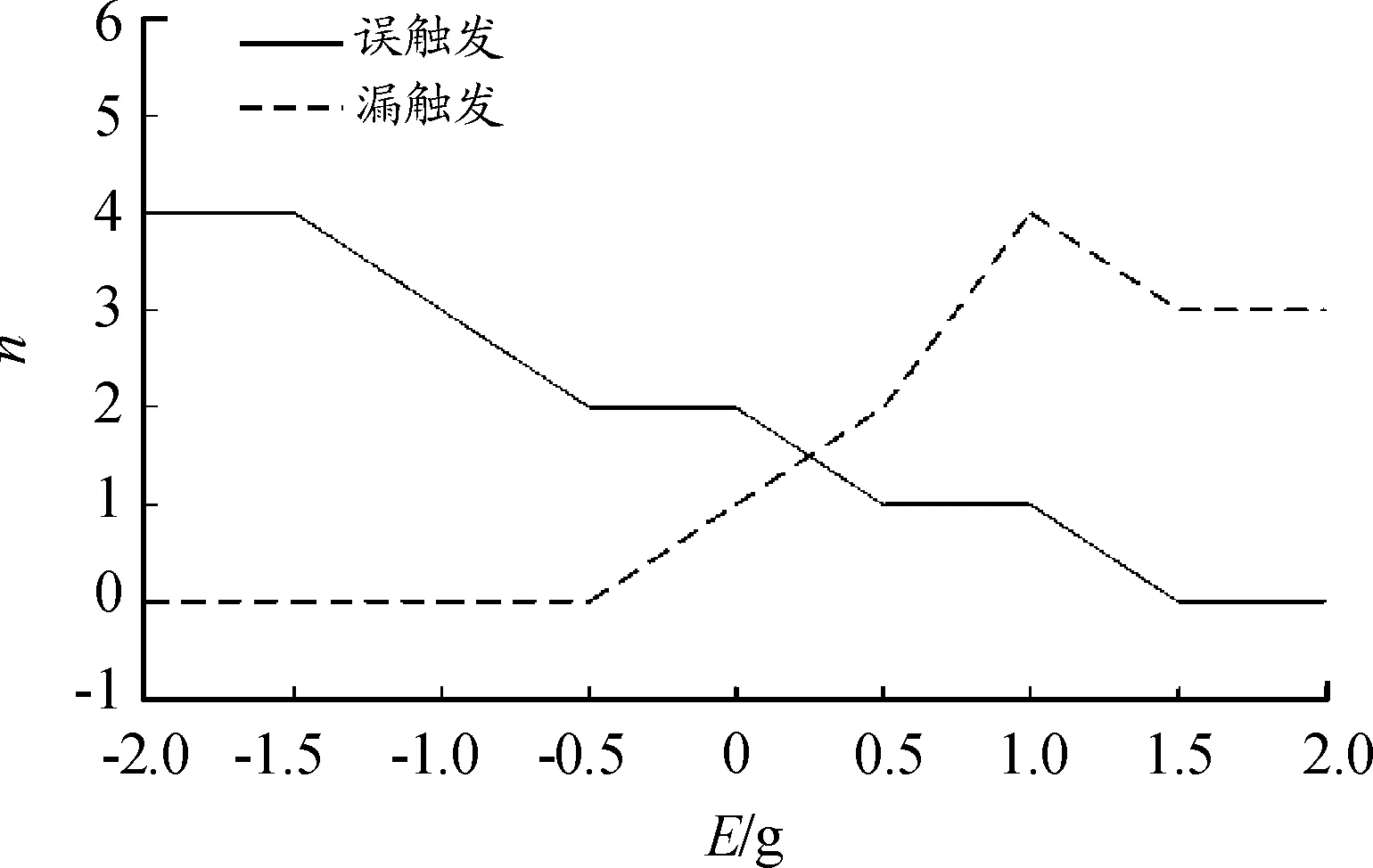
圖13 不同期望時誤觸發(fā)、漏觸發(fā)次數(shù)
設(shè)置期望為0.006 42g,標(biāo)準(zhǔn)差為1g~8g、間隔為1g,分別輸入到仿真的臺車不同碰撞初速度下的加速度信號中,統(tǒng)計觸發(fā)算法誤觸發(fā)、漏觸發(fā)的次數(shù)。圖14為不同標(biāo)準(zhǔn)差時觸發(fā)算法誤觸發(fā)、漏觸發(fā)次數(shù)曲線,可以看出漏觸發(fā)次數(shù)相對較少,說明標(biāo)準(zhǔn)差的變化對漏觸發(fā)的影響較小;同時可以看出,標(biāo)準(zhǔn)差較小時,誤觸發(fā)次數(shù)相對較少,只有在標(biāo)準(zhǔn)差超過6g時,誤觸發(fā)次數(shù)才顯著增多,說明只有在車輛振動比較劇烈的情況下才會導(dǎo)致系統(tǒng)容易誤觸發(fā)。
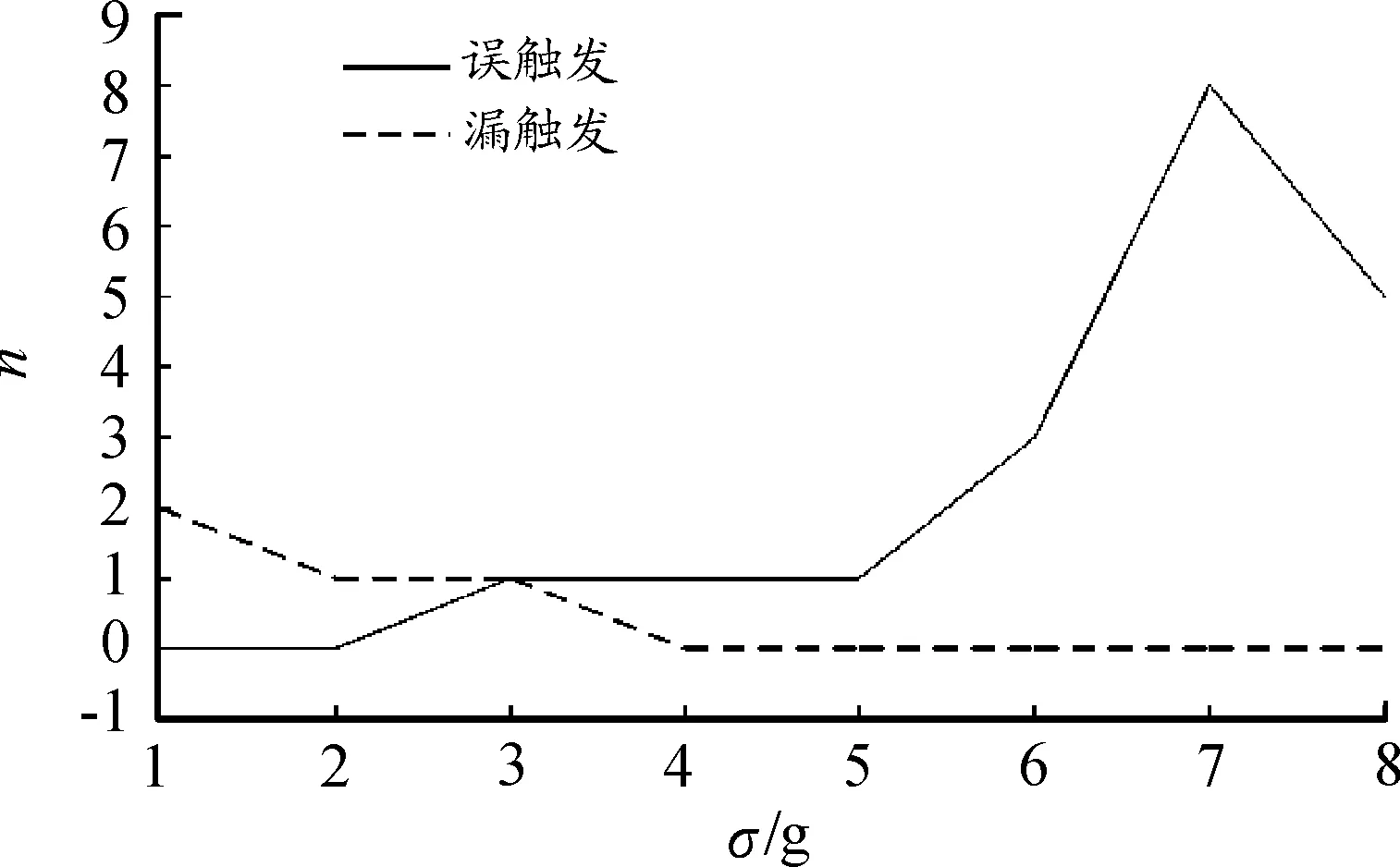
圖14 不同標(biāo)準(zhǔn)差時觸發(fā)算法誤觸發(fā)、漏觸發(fā)次數(shù)
4 ACNS終端試驗
ACNS終端框圖如圖15。ACNS終端以STM32F1精英版為核心,外接三軸加速度傳感器,GPS模塊和GSM模塊。加速度傳感器用于實時采集車身加速度信號,GPS模塊用于接收地理位置信息,微控制器收集加速度傳感器、GPS模塊的數(shù)據(jù),在判斷車輛發(fā)生碰撞后,將相關(guān)信息整合發(fā)送至GSM模塊,由GSM模塊負(fù)責(zé)將事故信息發(fā)送出去,SD卡用于存儲微控制器處理后的碰撞初速度、碰撞過程中的加速度等數(shù)據(jù),顯示屏用于顯示碰撞時的地理位置、碰撞初速度等事故信息。鋰電池為整個終端供電。
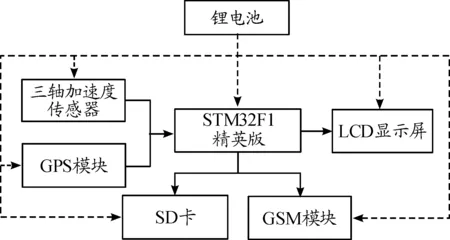
圖15 ACNS終端框圖
通過有限元仿真得到碰撞初速度15~25 km/h、間隔1 km/h的11組臺車碰撞加速度數(shù)據(jù),通過Matlab隨機(jī)生成11組期望為0.006 42g、標(biāo)準(zhǔn)差為3.524 75g的正態(tài)分布數(shù)據(jù)作為干擾加速度,然后分別加入到仿真的臺車不同碰撞初速度下的加速度數(shù)據(jù)中,最后將包含干擾的加速度數(shù)據(jù)存儲到外部SD卡,輸入到ACNS終端,驗證觸發(fā)算法的可靠性。ACNS終端寫入加速度峰值法程序,通過讀取SD卡中的加速度數(shù)據(jù),判斷是否發(fā)生碰撞,并將碰撞信息顯示在LCD顯示屏上。系統(tǒng)在19 km/h時發(fā)生誤觸發(fā)情況,碰撞過程中的加速度峰值為-16.96g,如圖16(a)所示,并對外發(fā)送了事故信息;在20 km/h時發(fā)生漏觸發(fā)情況,碰撞過程中的加速度峰值為-16.74g,如圖16(b)所示。結(jié)果表明,臺車干擾加速度會降低觸發(fā)算法的可靠性。
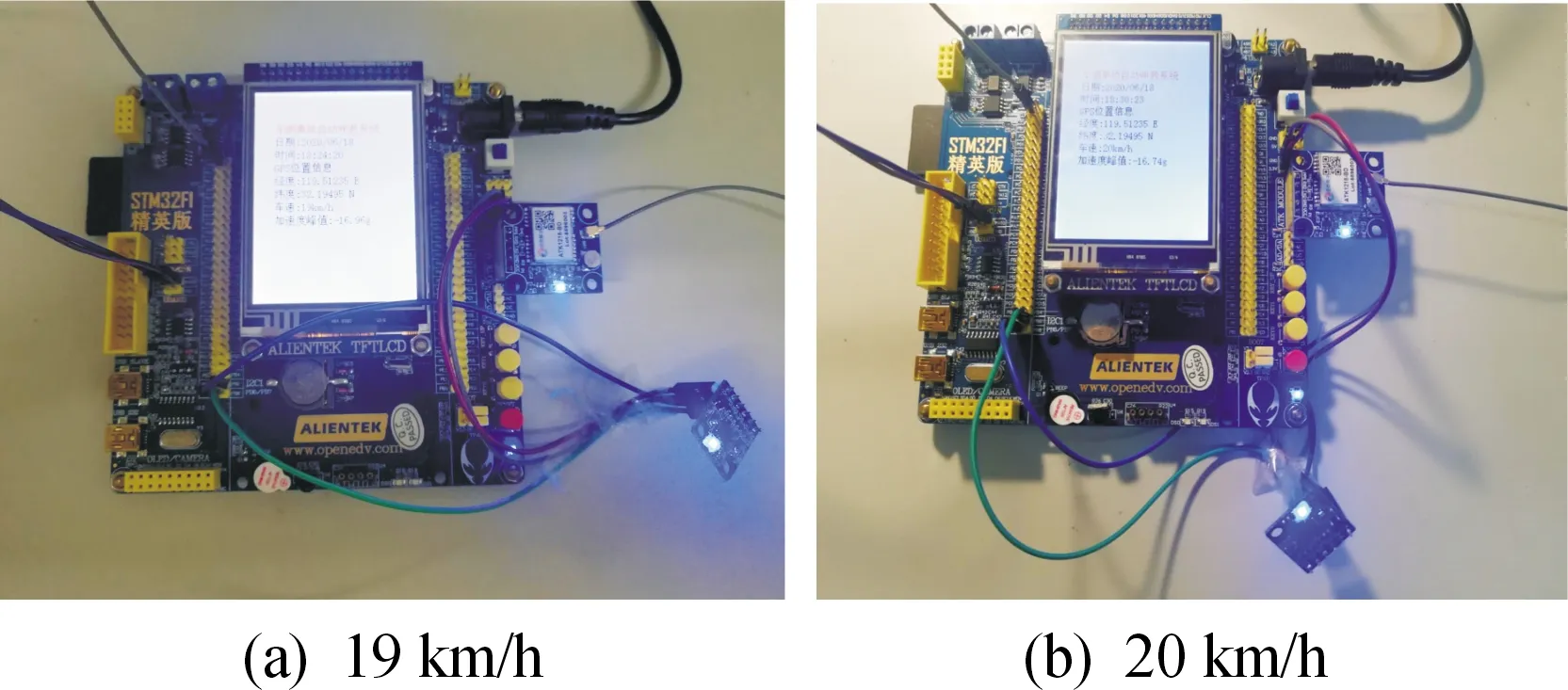
圖16 不同碰撞初速度的ACNS終端碰撞信息顯示
5 結(jié)論
建立了臺車碰撞試驗系統(tǒng)的有限元仿真模型,并通過比較20 km/h下的臺車和仿真碰撞加速度驗證了模型的可靠性。提取臺車碰撞試驗加速度的干擾加速度進(jìn)行正態(tài)檢驗,證明干擾加速度服從正態(tài)分布。在15~25 km/h進(jìn)行有限元仿真,得到碰撞加速度信號;加入干擾加速度,比較了觸發(fā)算法誤觸發(fā)、漏觸發(fā)的次數(shù),發(fā)現(xiàn)干擾加速度的存在會影響觸發(fā)算法對碰撞事故的判斷,導(dǎo)致誤觸發(fā)、漏觸發(fā)情況增多。通過改變正態(tài)分布參數(shù),研究干擾加速度期望、標(biāo)準(zhǔn)差對觸發(fā)算法的可靠性影響。隨著期望的增大,觸發(fā)算法誤觸發(fā)概率減小,漏觸發(fā)概率增大。并且,觸發(fā)算法在標(biāo)準(zhǔn)差較小時,受到的影響較小,只有在標(biāo)準(zhǔn)差較大時,才會顯著影響觸發(fā)算法對碰撞事故的判斷。最后通過ACNS終端試驗對加入干擾加速度時觸發(fā)算法的可靠性和干擾加速度正態(tài)分布參數(shù)敏感性進(jìn)行了驗證,得出的試驗結(jié)果與分析一致。
猜你喜歡
艦船科學(xué)技術(shù)(2022年20期)2022-11-28 08:19:18
數(shù)學(xué)物理學(xué)報(2022年4期)2022-08-22 04:09:28
減速頂與調(diào)速技術(shù)(2020年4期)2020-11-22 07:20:26
上海節(jié)能(2020年3期)2020-04-13 13:16:16
石油化工建設(shè)(2019年6期)2020-01-16 08:03:42
天津醫(yī)科大學(xué)學(xué)報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(shù)(2016年3期)2016-06-05 09:36:08
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18