模塊化多電平換流器自適應故障限流控制策略
2021-09-13 01:40:58趙西貝趙成勇許建中
電力系統自動化 2021年17期
關鍵詞:故障
樊 強,趙西貝,趙成勇,許建中
(新能源電力系統國家重點實驗室(華北電力大學),北京市 102206)
0 引言
模塊化多電平換流器(modular multilevel converter,MMC)雖無換相失敗問題,且具有開關頻率低、擴展性強等優點[1-2],但由于其低慣量、弱阻尼特性,直流故障的清除成為基于MMC的柔性直流(簡稱柔直)電網工程化應用面臨的主要挑戰之一[3-5]。
目前柔直工程大多采用半橋MMC,通過在直流線路上配置高壓直流斷路器(DC circuit breaker,DCCB)來清除故障[6]。DCCB的大體積和高建設成本不利于其工程化應用,因此需要在保證DCCB快速清除直流故障的前提下兼顧其經濟性。目前主要有附加電抗器和附加控制兩種方案來改善DCCB的經濟性。
在附加電抗器方案[7-9]中,通過在故障回路中引入限流電抗器可有效降低斷路器的開斷電流,但由于限流電抗器本身制造成本高,因此換流器的建設成本和占地面積的改善作用有限。
附加控制方案在節約成本方面和工程化應用方面更具有優勢[10-16]。文獻[10]提出通過控制方法來增大故障期間故障電流回路等效阻抗,降低故障電流峰值和上升速度,但其在直流電網中的適用性還有待驗證。文獻[11]提出了故障期間旁路換流器所有子模塊的思路,以達到抑制直流側故障電流的效果,但也存在無法限制故障初期電流的發展和延緩系統恢復等缺點。文獻[12-13]提出了基于混合型MMC的附加主動限流控制器,可有效減小故障電流峰值,但其對半橋MMC的有效性有待進一步驗證。文獻[14]提出了一種具有拓撲結構通用性的緊急限流控制策略,能夠降低DCCB的開斷電流和耗散能量,但也存在著無法限制初期故障電流上升速度的問題。文獻[15-16]提出在故障中重構MMC橋臂電壓參考值的方法,可有效限制故障電流的發展速度,但并未考慮故障清除后系統快速恢復問題。
基于此,本文提出了一種適用于半橋MMC柔直電網故障限流的自適應控制器。通過在故障期間重構MMC直流電壓和橋臂子模塊電容電壓的參考值,可有效限制故障電流的快速發展并加快系統的恢復速度。全文分為4個部分:第1部分主要介紹了自適應控制器及其基本原理;第2部分理論推導了自適應控制器對半橋MMC故障電流的作用機理;第3部分在基于半橋MMC的四端直流電網模型中對自適應限流控制器進行了仿真,驗證結果表明,此自適應控制器可在故障期間明顯降低直流側故障電流峰值,從而降低直流斷路器的建設成本和體積,并可使故障后系統快速恢復;第4部分為總結。
1 自適應限流控制器的基本原理
柔性直流電網換流器組成的基本單元是MMC,當其發生直流側故障時,MMC橋臂中投入的子模塊電容經過直流電抗器和斷路器通流支路向故障點饋入短路電流。在故障期間MMC單相投入的子模塊總數將直接影響故障電流的上升速度和峰值。任意時刻下MMC橋臂子模塊投入的個數(以A相為例)可由式(1)得出。
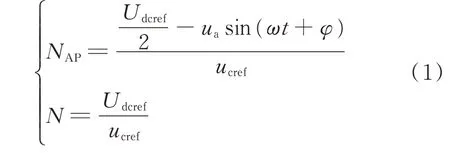
式中:Udcref為MMC直流側電壓的參考值;ucref為橋臂子模塊電容電壓的參考值;ua為A相調制波幅值;ω為角頻率;t為時間變量;φ為調制波初相角;NAP為A相上橋臂實際投入的子模塊個數;N為MMC單相投入的子模塊總數。
從式(1)看出,通過在故障期間重構Udcref和ucref,可有效減少故障期間MMC單相投入的子模塊總數,減少子模塊電容的放電量,進而限制故障電流的上升速度和峰值。基于此,設計了自適應控制器。
1.1 含自適應控制的MMC主控制器
自適應控制包含可在故障工況下自適應重構MMC直流側電壓的直流限流控制環節和可在故障工況下自適應重構MMC的橋臂子模塊電容電壓的子模塊電容電壓控制環節,其框圖如圖1所示。
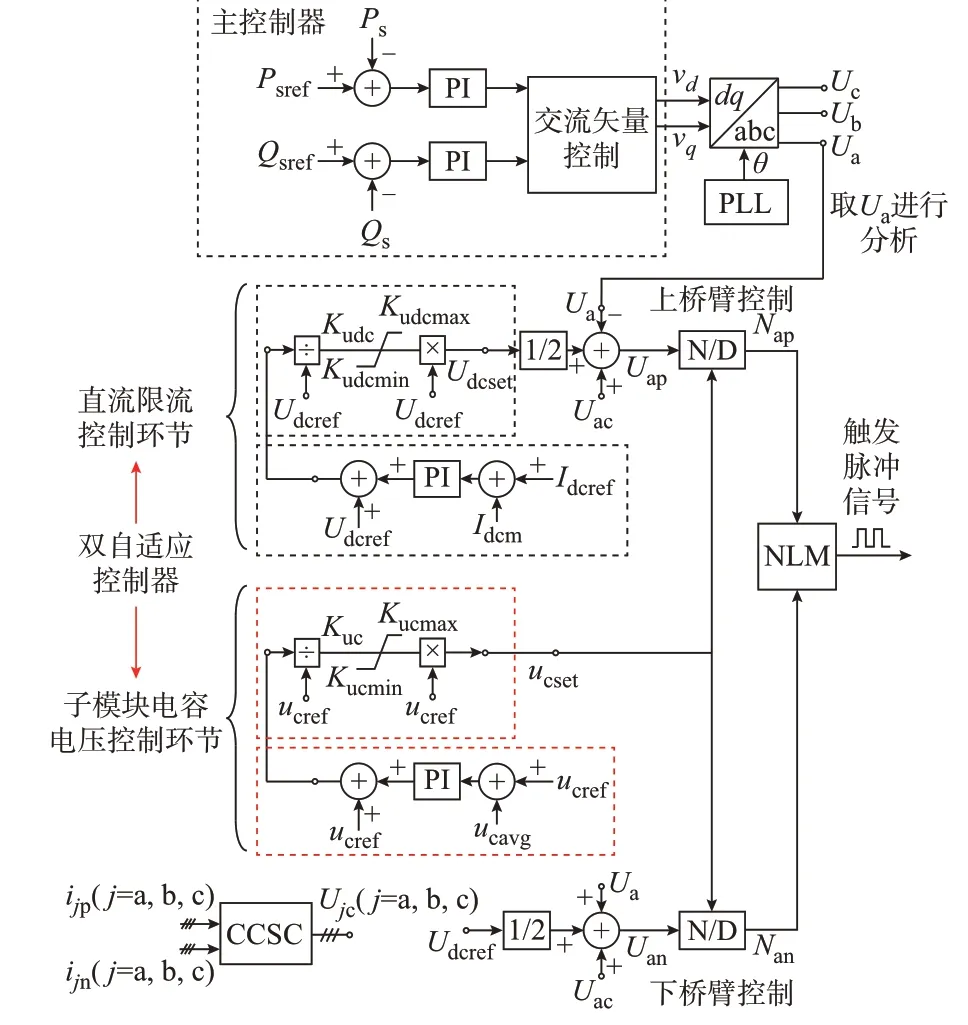
圖1 含自適應控制器的MMC控制器框圖Fig.1 Block diagram of MMC controller with adaptive controller
圖1中主控制器部分為雙閉環控制器[17]。圖中Psref和Qsref分別為有功功率和無功功率的參考值;Ps和Qs分別為有功功率和無功功率的測量值;Ua、Ub、Uc為 三 相 調 制 波 電 壓;vd和vq分 別 為 調 制 波 的有功分量和無功分量;PLL表示鎖相環;θ為鎖相環的 輸 出 角;Idcref和Idcm為 直 流 電 流 的 參 考 值 和 測 量值;Udcref和Udcset為直流電壓的參考值和設定值;Kudc為直流電壓重構比,限幅范圍為[Kudcmin,Kudcmax];ucavg為子模塊電容電壓的平均量測值;ucset為子模塊電容電壓的重構值;Kuc為子模塊電容電壓重構比,限幅 范 圍 為[Kucmin,Kucmax];NLM(nearest level modulation)表示最近電平逼近調制[18];N/D表示除法運算;Uap、Uan分別為A相上、下橋臂電壓;Nap、Nan分別為A相上、下橋臂投入子模塊個數;CCSC(circulating current suppressing controller)表示環流抑 制 控 制 器[19];ijp、ijn分 別 為 三 相 上、下 橋 臂 電 流(j=a,b,c);Ujc為CCSC輸出的三相電壓。
基于半橋MMC的自適應控制器在故障工況下快速降低直流電壓參考值和增大子模塊電容電壓參考值,從而在故障期間快速降低單相實際投入的子模塊個數,抑制直流側故障電流的快速上升。自適應控制器具有一定的工程實用性,通過控制層面的改進,降低了對故障保護設備的硬件需求,相比改進拓撲,其實用性更強,并且對不同的換流站拓撲和不同類型的控制策略具有較好的適應性。
1.2 直流限流控制環節
在直流限流控制環節,將直流電流參考值Idcref與測量值Idcm的偏差輸入比例-積分(proportionalintegral,PI)控制器,得到直流電壓的偏差量,從而對直流電壓的參考值Udcref進行重構得到直流電壓的重構值Udcset。
穩態工況下,由于Idcref和Idcm間無偏差,Udcset=Udcref。故 障 工 況 下,由 于Idcm>Idcref,使 得Udcset<Udcref。其中,Idcref可由Psref與Udcref的比值得到。引入直流電壓重構比Kudc來反映Udcset和Udcref的變化關系,其定義見式(2):

為使此控制器在穩態工況不對系統產生影響,而故障態工況能最大限度地進行限流操作,需要對其直流電壓重構比進行限幅,范圍為[Kudcmin,Kudcmax],本文設定為[0,1]。則不同工況下Kudc的取值見式(3):
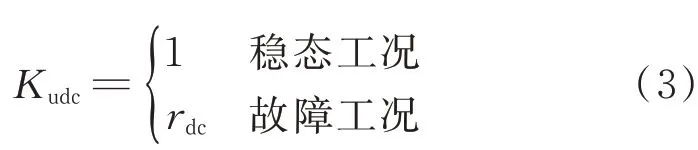
式中:rdc為故障工況下Kudc的值,rdc<1。從式(3)可看出,此控制器可在MMC換流器穩態工況下即可投入,穩態運 行下Kudc=1,故障工況下Kudc快速降低,使直流電壓快速重構到遠小于額定值的新值,可快速減少橋臂投入子模塊個數。
1.3 子模塊電容電壓控制環節
子模塊電容電壓控制環節將MMC橋臂子模塊電容電壓的參考值ucref與測量值ucavg相減,輸入PI控制器,得到子模塊電容電壓的偏差量,從而對子模塊電容電壓的參考值ucref進行重構,得到子模塊電容電壓的重構值ucset。
穩態工況下,由于ucref與ucavg間無偏差,ucset=ucref。故障工況下,由于子模塊電容的放電,導致ucref>ucavg,使得ucset>ucref。其中ucref可由Udcref與橋臂子模塊總數N的比值得到。引入子模塊電容電壓重構比Kuc反映ucset和ucref的變化關系,其定義見式(4):

同理,對子模塊電容電壓重構比Kuc進行限幅,范圍為[Kucmin,Kucmax],本文設定為[0.5,1.5]。不同工況下Kuc的取值見式(5):

式中:rc為故障工況下Kuc的值,rc>1。從式(5)可看出,此控制器亦可在MMC正常運行時投入,正常運行下Kuc=1,故障工況下Kuc會快速增大,使子模塊電容電壓參考值快速重構到高于額定值的新值,亦可快速減少橋臂投入子模塊個數。
1.4 自適應控制器雙環的聯合應用
本文提出的適用于MMC故障限流的自適應控制器中的2個控制環可同時在系統穩態工況下投入,在故障發生時Kudc和Kuc同時變化,對直流側故障限流有疊加效果。將式(2)和式(4)代入式(1),可得投入雙適應型控制器時的重構后單相投入子模塊個數Nset。

由式(6)可知,在故障發生后,單相投入的子模塊個數快速從N降到了Nset,自適應控制器對故障限流具有疊加效果。此外,由于系統故障時,MMC橋臂子模塊電容電壓釋放的能量明顯降低,加上子模塊電容電壓控制環節的作用,可明顯加快故障清除后系統的恢復速度。
投入自適應控制器后,直流故障限流特性如圖2所示。
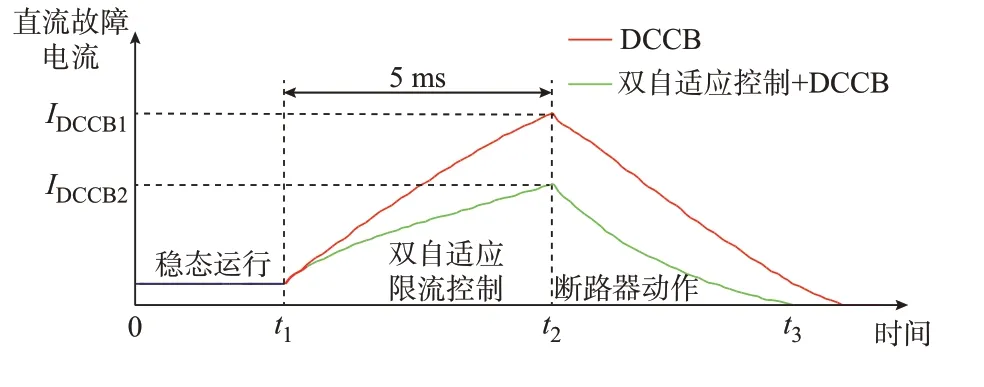
圖2 直流故障電流波形Fig.2 Waveform of DC fault current
圖2中,系統在0~t1時段處于穩態,此時自適應控制器已投入并工作在正常狀態。在t1時刻系統直流側發生極對回線短路故障。t1~t2時段,為系統故障檢測和斷路器動作過程(5 ms)[20]。此時,自適應限流控制的2個環節自動處于重構狀態進行直流故障限流,通過快速減少投入的子模塊個數,使DCCB的開斷電流由IDCCB1降低為IDCCB2。t2時刻,斷路器成功開斷,直流故障電流逐漸減小為0。
2 自適應限流控制器對半橋MMC故障電流的作用機理分析
本章主要分析自適應控制器的投入對故障工況下半橋MMC橋臂電流和直流電流的作用機理,并針對單端半橋MMC進行理論分析與仿真的對比。
MMC故障初期等效電路見附錄A圖A1,半橋MMC在故障發生初期等效電路如附錄A圖A1(a)所示。為方便分析和計算,將等效電路分為2部分:直流側部分(見附錄A圖A1(b))和交流側部分(見附錄A圖A1(c))。
2.1 計及自適應控制的MMC直流側故障電流的計算方法
MMC直流故障等效電路如附錄A圖A1(b)所示,為直流電源激勵下的一階RL電路,可得:

式中:Leqdc為直流故障電路的等值電感之和;idc為直流故障電流;Udc為直流電壓;Reqdc為直流故障電路的等值電阻之和。
Leqdc和Reqdc可由式(8)得出:
式 中:Larm為MMC橋 臂 電 抗;Ldc為 直 流 側 電 抗;Rarm為 橋臂電阻;Rdc為直流側 電阻;Rf為直流側故障等效電阻。
則直流故障電流idc可表達為:
式中:τ為一階RL電路的時間常數;t0為故障發生時刻;Idc為系統發生直流故障前的穩態電流。
計及自適應控制器后,結合式(6)和式(9),直流側故障電流i′dc的可表示為:

從式(10)看出,通過對MMC故障時的直流電壓進行重構,可有效降低直流故障電流。
2.2 計及自適應控制的MMC橋臂電流的計算方法
MMC的交流側部分等效電路如附錄A圖A1所示,其中Leqac和Reqac分別為交流等效電路的等效電感和等效電阻,其值可由式(11)得出:
式中:Rac和Lac分別為交流系統等效電阻和等效電感。
整個交流系統的等效電路實則為交流電源激勵下的一階RL電路。公共連接點交流電壓uacj和MMC調制波電壓umj可由式(12)表示:

式中:Uacj為uacj的相幅值;Umj為umj的相幅值;φj為移相角。
則故障下的穩態交流電流iacj+可表示為:

式(13)中:
自適應控制器通過影響橋臂投入子模塊個數對MMC調制波umj產生影響,計及自適應控制器的調制波umj的表達式(調制波幅值快速降低到非常小的值,其幅值主要受Kudc/Kuc的影響)如式(16)所示:

計及自適應控制器后的故障下穩態交流電流iacj+的幅值和初相角γj的表達式可分別表示為:
則MMC交流電流的表達式為:

式中:iacj-為MMC發生故障前的穩態交流電流;τac=Leqac/Reqac為故障后交流等效系統的時間常數;t0為故障發生時刻。
故障下MMC橋臂電流iarmpj(以A相上橋臂為例)可由式(20)計算得出:

式 中:iaca為A相 交 流 電 流;idc為 直 流 故 障 電 流。自適應控制器通過影響MMC交直流側故障電流,對故障下MMC橋臂電流進行優化。
2.3 計及自適應控制的半橋MMC故障電流計算方法的單端仿真驗證
為驗證計及自適應控制的半橋MMC直流故障電流和橋臂電流公式推導的正確性,對單端MMC進行仿真驗證,具體仿真參數參考附錄B表B1,直流側雙極故障發生在MMC1直流側出口處。直流側電感Ldc=0.1 H,交流系統等效電感Lac=0.043 9 H,直流線路電阻Rdc=1Ω,橋臂電阻Rarm=2Ω,交流側等效電阻Rac=0.137Ω,直流側短路等效電阻Rf=0.01Ω,直流限流控制環節的PI比例系數KPIdc=14,PI積分系數KIIdc=10-6,子模塊電容電壓控制環節的PI比例系數KPuc=2,PI積分系數KIuc=0.008。
為更好地進行理論計算值和仿真值比對,在理論計算環節中令故障工況下Kudc/Kuc=0(自適應控制器可使MMC單相投入子模塊快速降低到接近于0的數值)。系統在穩態期間投入自適應限流控制器,在1.5 s時在直流側發生雙極短路故障,則在故障期間(1.5~1.54 s)關鍵測點參數的理論計算與仿真的對比見附錄A圖A2。從圖A2可以看出,在故障發生后,自適應控制器可迅速抑制故障電流的上升,故障電流的仿真值和計算值可很好地吻合,驗證了MMC直流側故障電流和橋臂故障電流公式的正確性。
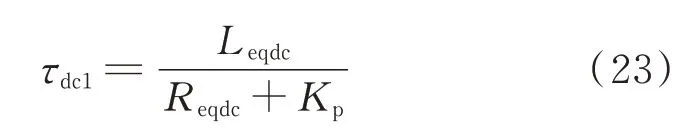
自適應控制器在故障清除的過程中,起主要作用的是直流限流控制器環節。在此環節中,積分器的調節作用無法進行精確數學描述。可令直流限流控制器環節中的積分系數為0,只保留比例環節對MMC橋臂故障電流和直流故障電流的計算式,進行進一步的驗證。此種工況下重構后的直流電壓可由式(21)表示:

式中:Kp為比例控制器的比例系數,取值為260。
用式(21)中的Udcset代替式(7)中的Udc,得到此工況下故障電流:

式中:τdc1為此工況下的時間常數,具體計算式見表達式(23)。
式(22)中其余參數含義與式(7)一致。此工況下交流電流和橋臂電流的計算式與式(13)—式(20)一致。
在此工況下,故障期間(1.5~1.54 s)關鍵測點參數的理論計算與仿真的對比如附錄A圖A3所示。從圖中可看出,在只考慮Kp時,故障電流的仿真值和計算值依然可良好地吻合,進一步驗證了MMC直流側故障電流和橋臂故障電流公式的通用性。
3 自適應控制器在柔性直流電網中的應用分析
在基于半橋MMC的四端柔直電網工程模型(見附錄A圖A4)中驗證自適應控制器在柔性直流電網的有效性,其中直流側平波電抗器的值為0.1 H,直流電網中各個換流器的參數詳見附表B表B1。
3.1 自適應控制器故障限流的仿真驗證
系統仿真設定1.5 s時在直流側線路Line14的MMC1直流側出口處發生直流側永久性雙極短路故障(暫時性故障[21]和永久性故障的仿真波形差異不大),則需要斷開與Line14相連的斷路器(CB14和CB41),清除直流故障(假定故障檢測時間為3 ms,斷路器的開斷時間是2 ms)。自適應控制對流過相應DCCB的故障電流及避雷器耗散能量的影響如圖3所示。
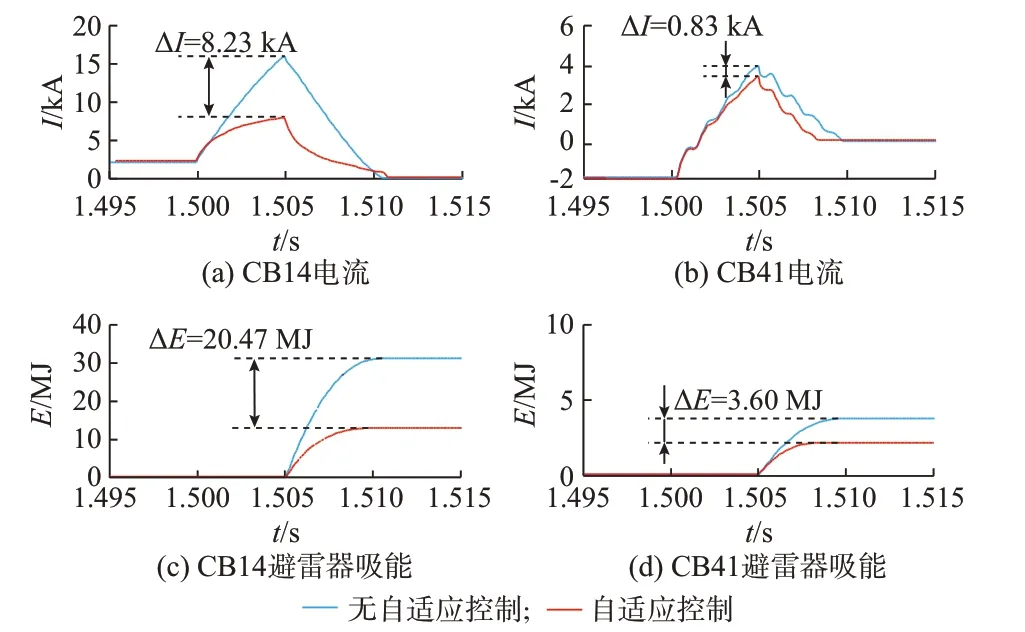
圖3 自適應控制對故障電流和避雷器吸能的影響Fig.3 Influence of adaptive control on fault current and energy absorption of arrester
圖3中,I和ΔI分別為電流及電流的變化量;E和ΔE分別為能量及能量的變化量。從圖中可看出,由于故障在MMC1直流側出口處,因此自適應控制器對直流斷路器CB14的相關參數影響明顯,可使直流斷路器CB14的開斷電流降低8.23 kA,相應的避雷器可減少20.47 MJ的能量吸收。而MMC2由于距故障點較遠,自適應控制器可使斷路器CB41的開斷電流減少0.83 kA,相應的避雷器可減少3.6 MJ的能量吸收。斷路器的性能指標需滿足最惡劣的情況(MMC1出口處故障對于CB14最惡劣),因此從CB14的數據比對可以看出,自適應控制可有效降低DCCB的開斷電流和避雷器吸收的能量。
自適應控制對MMC1的直流側電壓的影響如附錄A圖A5所示。從圖中可以看出,自適應控制器穩態工況下不影響MMC直流電壓,故障工況下會通過減小MMC單相投入子模塊個數,降低MMC直流電壓,從而減少故障電流。在投入自適應控制器系統恢復過程中,MMC1側的直流電壓波動變大,其峰值相對于無控制時增加82 kV,這是由于子模塊電容電壓環節為使系統加快恢復帶來了高的振蕩量,但仍在運行可接受的范圍之內。此外,還需觀察橋臂電流的波形,確保換流器不會因為橋臂電流過流閉鎖,自適應控制對橋臂電流的影響如附錄A圖A6所示。圖中的仿真波形顯示在投入自適應控制器后,MMC1六橋臂故障電流的波動范圍從-5.34~2.20 kA變化為-5.43~3.88 kA,波動范圍有所增加,但仍在合理范圍內,說明在自適應控制器投入之后,故障工況下不會造成換流器因為橋臂過流而閉鎖。
3.2 自適應控制器加快系統恢復的仿真驗證
自適應控制器在故障工程中可有效降低MMC子模塊電容電壓的放電量,再加上子模塊電容電壓控制環節的作用,可明顯加快故障清除后系統的恢復速度。為驗證自適應控制器加快系統恢復的特性,截取MMC1和MMC4橋臂子模塊電容電壓波形(A相上橋臂)進行比對,系統恢復穩定的判據為電壓波動范圍小于穩定值的±5%,仿真波形圖見圖4。
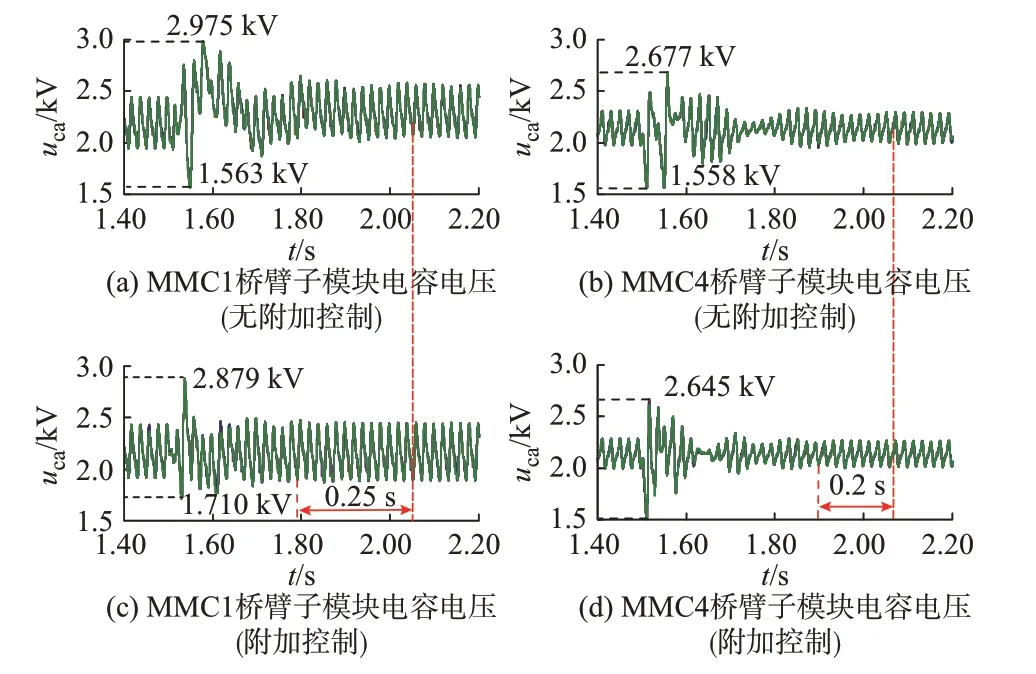
圖4 自適應控制對系統恢復時間的影響Fig.4 Influence of adaptive control on system recovery time
圖4中,uca為MMC中A相 上 橋 臂子模塊電 容電壓值。從圖中可得出,在投入自適應控制器后,MMC1和MMC4的橋臂子模塊電容電壓波動明顯減小,在斷路器動作后系統恢復過程中,換流站的子模塊電容電壓均可快速恢復到故障發生前的數值,但由于故障點與不同換流站的距離不同,導致自適應控制器的整定時間不同,整體上可加快系統的恢復時間達0.2 s以上。系統的快速恢復主要是自適應控制器中的定子模塊電容電壓環節的作用。故障后系統恢復至新的穩態時,MMC1的橋臂子模塊電容電壓波動有所增加,其原因是系統將線路Line14切除,導致系統的潮流重新分配,線路的損耗有所增加,各個換流器發出的功率增加。此外,投入自適應控制器后,系統在故障前后均能穩定運行,從側面說明,子模塊電容電壓重構控制器對MMC電容電壓的均衡控制影響不大。
直流電網中各個換流站直流側出口潮流分布如附錄A圖A7所示,圖A7(a)—(d)為直流電網各個換流站直流側出口的有功功率,整體上看,投入自適應控制器后,各個換流站出口潮流的超調量明顯降低,直流電網系統潮流的恢復明顯加快。以恢復時間最長的MMC4為例,可加快系統恢復0.2 s。
為更好地分析自適應控制器運行過程,截取MMC1中一次系統(物理量)和二次系統(信號量)中關鍵測點波形如附錄A圖A8所示。系統發生故障后,MMC直流電壓瞬間跌落,但子模塊電容電壓在緩慢降低,直流電流上升速度緩慢,峰值緩慢增加。故障線路切除后,MMC直流電壓和子模塊電容電壓平均值可快速恢復。故障線路由于被切除,故障線路電流為0。
為更加方便地分析自適應控制器在故障發生前后的動作,特將整個過程分為穩態、故障、恢復3個部分。由圖A8(b)中可看出,穩態下系統正常運行,所有控制的輸出都維持常數值。當系統發生故障后,直流限流控制環節的輸出值快速降低,子模塊電容電壓控制環節的輸出值增加,其綜合結果令MMC單相投入的子模塊個數快速減小,達到故障限流的目的。在系統恢復階段,直流限流控制環節的輸出值增加,子模塊電容電壓控制環節的輸出值減小,其綜合結果令MMC單相投入的子模塊個數增加,子模塊電容快速充電,整個系統快速恢復達到新的穩態。
4 結語
為降低半橋MMC柔直電網中斷路器的造價和占地面積,本文從控制的角度出發,提出了一種自適應限流控制器,得到以下結論。
1)自適應控制器在整個系統正常運行后投入運行即可,其在故障清除前后無須人為控制,可通過故障期間重構MMC直流電壓和子模塊電容電壓參考值自適應配合DCCB清除故障,加快系統恢復。
2)自適應控制器可有效降低DCCB清除故障時的開斷電流,明顯減少避雷器吸收的耗散能量。
3)在故障后系統重啟過程中,自適應控制器中的定子模塊電容電壓控制環節可有效減少橋臂子模塊電容電壓值的波動和直流電網中潮流的超調,并加快系統的恢復。
本文所提方法的工程實用性以及對MMC交流故障穿越策略的影響暫未考慮,后續將開展相關研究。
附錄見本刊網絡版(http://www.aeps-info.com/aeps/ch/index.aspx),掃英文摘要后二維碼可以閱讀網絡全文。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
