基于風力發電機典型控制策略的控制參數設計及穩定性驗證
2021-09-13 01:41:44郭雅慧王志聰
電力系統自動化 2021年17期
朱 瑛,郭雅慧,王志聰
(河海大學能源與電氣學院,江蘇省南京市 211100)
0 引言
據國際能源署(IEA)和中國可再生能源學會風能專業委員會(CWEA)稱,由于新型冠狀病毒肺炎疫情的蔓延,為加速全球經濟復蘇,電力結構需更大程度地轉向可再生能源以促進能源轉型[1]。近些年,由于化石燃料等傳統能源日益緊缺,風電發展迅速,風能成為目前世界上最成熟、最有前途的可再生能源之一[2]。2019年,中國風力發電量首次突破400 TW·h,占總發電量的5.5%[3-5]。隨著全球的風電產能持續增長,風電技術將進一步發展。
然而,由于風速的隨機性[6-8],波動的風電功率會給電網帶來電壓或頻率的波動,降低了電能質量,且會導致一系列的不穩定問題[9]。針對功率的波動,學者們提出了很多平滑方法,總體可分為間接功率控制、直接功率控制兩大類[10-11]。
間接功率控制利用儲能系統實現,只要引入足夠大容量的儲能就可顯著減輕功率波動,同時不影響風力發電效率[12-13]。然而,加裝儲能的成本較高,且無法改善風力發電機端側變流器所造成的功率波動。因此,研究依靠風力發電系統自身平滑輸出功率的控制策略很有必要,即直接功率控制。直接功率可通過轉子動能、直流母線電壓、槳距角等來控制[14-16]。然而,直流母線電壓控制引起的過大電壓脈動會影響系統正常穩定運行[17];頻繁的槳距角控制往往會增大風力機葉片機械應力且會降低風力發電效率[18];風力發電機轉子較大的慣性能儲存大量的能量[19-21],調節轉速來釋放儲存的轉子動能可間接控制風力機輸出功率。
文獻[20-21]中研究了基于轉子動能的功率控制策略,但是沒有詳細分析控制策略,且未考慮控制參數對風力機運行穩定性的影響。文獻[22]從功率平滑的角度對恒功率控制、恒轉矩控制和最大功率控制進行了比較,推導出了風速與輸出功率間的傳遞函數,利用慣性能量來平滑功率,并分析了平滑的效果及穩定性,但沒有給出頻域中轉速控制的優化設計。文獻[23]基于改進最大功率點跟蹤(MPPT)控制策略,在文獻[22]的基礎上建立了從風速到輸出功率、轉矩和轉速的傳遞函數,深入考慮了頻域中轉速控制的優化設計,得到了控制器的優化參數,但未考慮風力發電機平滑策略變化對該優化設計的影響。針對控制器參數的設計和整定也有較多研究,文獻[24]通過分析系統特征值和相關因子,研究得到全風況下系統特征根軌跡及相應振蕩模式,為研究電力系統變換器和控制器的設計提供了理論參考。文獻[25]通過研究雙饋風力發電機變換器控制參數與系統特征根之間的關系,提出了使電力系統小干擾穩定的變換器控制參數設計方案。但是,上述研究均沒有分析風力機穩定運行條件,也沒有考慮優化參數的設計。
本文在控制器優化設計的基礎上,深入考慮控制參數對風力機運行穩定性的影響,并進行了穩定性驗證,分析了不同風力發電機控制策略在優化設計下的不同表現。首先,建立了風力發電機控制策略——改進MPPT和功率反饋控制下的傳遞函數,并提出了風力機的穩定運行約束條件。然后,對控制器進行了合理的優化設計,得到了控制器的優化參數,研究并保證了轉速的穩定性。此外,根據2種控制策略下不同風速時系統的控制器參數根軌跡、Nyquist曲線和Bode圖,進一步驗證了風力發電機控制器設計的穩定性,并分析了不同濾波時間常數對功率平滑效果的影響。
1 系統模型
1.1 風力機模型
風力機吸收的最大功率PW,opt可表示為:

式中:S=πR2為風力機的掃描面積,其中,R為風力機的葉片半徑;ρ為空氣密度;VW為實際風速;ωm為風力機的旋轉角速度;λopt為最佳葉尖速比;CP,opt為槳距角β=0時的最大風能利用系數。當β=0時,表征風力機吸收和利用外界風能效率高低的風能利用系數CP與葉尖速比λ之間的關系曲線如附錄A圖A1所示。
同時,風力機捕獲的功率PW可以表示為:

式中:Tm為輸入風力機的轉矩。
由式(3)可推出:

1.2 永磁同步發電機模型
永磁同步發電機(PMSG)在d-q旋轉坐標系下的電壓為:

式中:vsd和vsq分別為PMSG的d軸和q軸電壓分量;Isd和Isq分別為PMSG的d軸和q軸電流分量;ψsd和ψsq分別為d軸和q軸定子繞組磁鏈,具體見式(6);Rs為定子的等效電阻;ωe=pωm為電角速度,其中,p為發電機極對數。

式中:Ld和Lq分別為d軸和q軸定子等效電感;ψf為永磁磁鏈。
PMSG的電磁轉矩Te可表示為:

PMSG的運動方程為:

式中:J為轉動慣量。由于直驅PMSG與風力機同軸相連,J可等效為風力機和PMSG的轉動慣量之和。
2 風力機穩定性分析
2.1 傳遞函數的建立
在轉速ωm下,風力機轉子中儲存的動能Em可以表示為:

當ωm變化時,風力機轉子動能變化所提供的功率Pm可表示為:

由上述方程可知,功率Pm不僅與轉速ωm有關,還與速度變化率dωm/dt有關。因此,可根據風力發電機的輸入功率PW、功率Pm和輸出功率Pe間的基本關系調節dωm/dt來平衡功率,具體表達式為:

附錄A圖A2表示的是風速、轉速變化時風力發電機的輸入功率PW的變化曲線,圖中給出了高、中、低3組不同風速。
在穩定運行狀態下,風力機按照MPPT曲線(即附錄A圖A2中虛線)運行以便最大程度地吸收風能。風速在9 m/s和12 m/s之間發生突變時,風力機獲得的功率PW將隨著曲線ABC增加,然后隨曲線CDA減少(圖A2中橙色箭頭)。然而,此時功率變化得很快,甚至在風速降低時會發生過沖,導致并網系統不希望發生的大功率波動。因此,為了獲得更平滑的功率,可使功率變化遵循曲線AB′C和CD′A(即圖A2中紫色箭頭),以轉子動能變化所提供 的功率Pm來補償區域ABCB′、CDAD′內功率的差異。Pm由控制器間接調節,因此重要的是對控制器進行優化設計,并需考慮風力機運行的穩定性,具體分析如下。
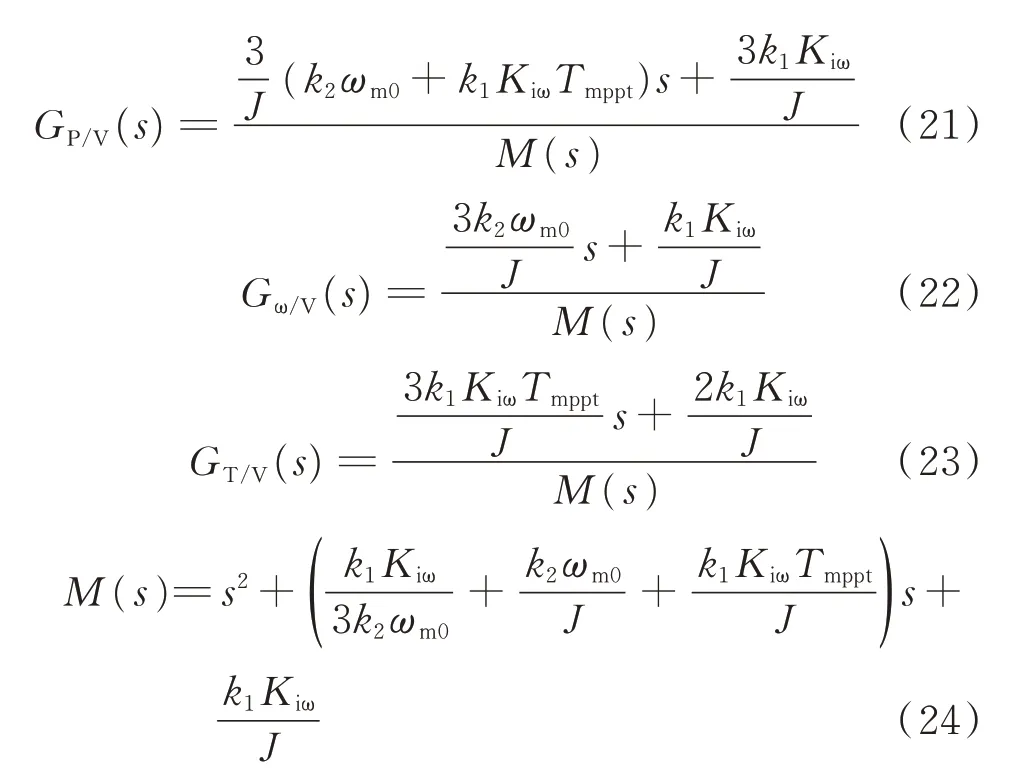
首先,建立風力發電機從風速到輸出功率、轉速、轉矩的無量綱傳遞函數GP/V(s)、Gω/V(s)、GT/V(s)[22-23]:


考慮風力發電機的2種典型功率平滑控制策略,即改進MPPT控制和功率反饋控制,分別建立這2種控制策略下從風速到輸出功率、電磁轉矩和轉速的傳遞函數,在頻域上設計控制器的優化控制參數。圖1為2種控制策略下轉速與輸出功率的關系圖。
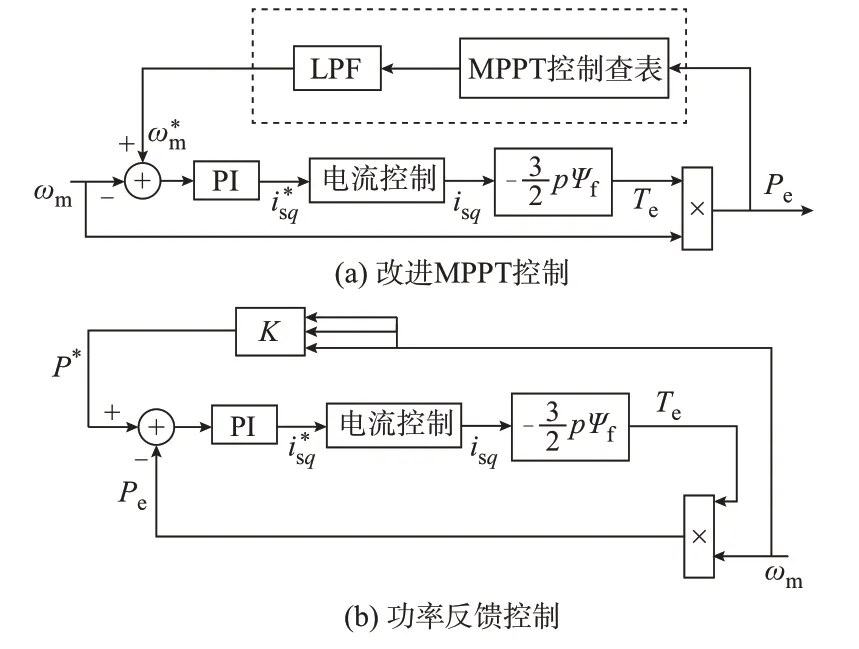
圖1 轉速與功率的關系Fig.1 Relationship between rotational speed and power
2.1.1改進MPPT控制下的傳遞函數
MPPT控制下,風力發電機的輸出功率會自動跟蹤并穩定在下一個風速的最大功率點處。由于風電系統較大轉動慣量的作用,風速變化時系統轉速不會發生突變,并利用風力機轉子來儲存動能,該動能可用來平衡功率。因而MPPT控制具有一定程度的功率平滑能力。改進MPPT控制在其基礎上引入低通濾波器(LPF),可將大于截止頻率的高頻輸出信號剔除,以進一步增強系統對更低頻段的功率波動的平滑作用。改進MPPT控制可進一步利用系統的轉動慣量,保證其對有功功率波動更好平滑效果的同時,避免功率輸出信號的振蕩。
根據上述發電機模型以及轉矩方程式,轉速ωm與風力發電機的輸出功率Pe間的關系如圖1(a)所示,附錄B圖B1是基于滯環矢量控制的PMSG控制框圖。圖中:ω*m為轉速的參考值,可通過查找Pe與ωm之間的關系曲線得到。MPPT控制中LPF的傳遞函數可表示為:

式中:Tmppt為LPF的濾波時間常數。
定義變量slope為:

根據圖1(a)的MPPT控制框圖,可得轉速參考值為:

由附錄B式(B1)—式(B7)可推出:

風力發電機轉速環的比例-積分(PI)控制器的傳遞函數Gsω可表示為:

式中:Kpω和Kiω分別為PI控制器的比例系數和積分系數。
由附錄B式(B11)可知,從風速到輸出功率的無量綱傳遞函數實際上是3階的,為將其簡化為2階,考慮

即令控制器的參數滿足Kpω=TmpptKiω。當式(20)不滿足時,3個3階傳遞函數的表達式如附錄B式(B12)—式(B15)所示。此時,可令控制器的參數滿足Kpω=TPIKiω,其中,TPI為某一常數值。
當降階條件式(20)滿足時,將式(18)、式(20)代入附錄B式(B8)—式(B10)中,可得改進MPPT控制下從風速到輸出功率、轉速、轉矩的傳遞函數,具體表達式如下。

2.1.2功率反饋控制下的傳遞函數
根據上述風力發電機模型以及轉矩方程,考慮風力發電機的功率反饋控制策略,以風力機捕獲的最大風能作為功率參考值,轉速ωm和風力發電機輸出功率值Pe間的關系如圖1(b)所示,附錄C圖C1是基于滯環矢量控制的完整框圖。圖中:P*為風力機輸出功率的參考值,通過風力機的最大跟蹤功率PW,opt得到,參數K根據實際需求選擇,在MPPT控制下取Kopt。控制器的傳遞函數表達式同2.1.1節式(19)。
當風力發電機以MPPT的工況運行時,其無法預留有功備用,在電網頻率跌落發生時,將不能提供有功支撐。因此,風力機往往通過減載控制放棄風能的最大捕獲,使風力機保持一定的備用容量[26]。低風速段通常使用風力機在MPPT區域的超速減載控制來獲取備用。
考慮一定減載率下的功率反饋控制,風力機所獲得的最大風能為PW,opt,d,圖1(b)中K值取Kd,具體表達式如下。
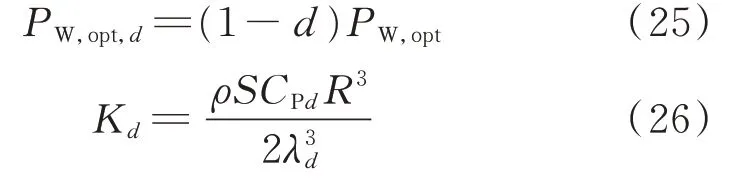
式中:d為減載率,一般取小于1的值;CPd和λd分別為減載率取d時風力機的風能利用系數和葉尖速比,可由式(27)和式(28)求得。

推導功率反饋控制下的傳遞函數,根據圖1(b)的功率反饋控制框圖可得:

由附錄C式(C1)—式(C5)可得:

另外,為了簡化從風速到輸出功率的無量綱傳遞函數的計算,考慮

式中:T為某一固定正值。
將slope的推導式(30)及簡化條件式(31)代入附錄B式(B8)—式(B10),可得功率反饋控制下從風速到輸出功率、轉速、轉矩的傳遞函數表達式如下。

2.2 風力機運行穩定性分析
為了使功率得到最大限度的平滑,應盡可能減小GP/V(s)的帶寬,而前提是必須始終將風力機保持在穩定的區域。附錄D圖D1(a)表示機械轉矩與轉速的函數關系。曲線L由每個風速下的最大轉矩點組成。曲線L的右側稱為穩定區域(dTm/dt<0),所以風力機的運動將被阻尼;曲線L的左側稱為不穩定區域(dTm/dt>0),因此,風力機的運動將得到增強。若風力機位于不穩定區域且dωm/dt>0,則其將加速進入穩定區域。但是,若風力機處于不穩定區域且dωm/dt<0,則其將減速直到停止,除非風速低于切入風速,否則這是不期望發生的[23]。
在MPPT控制下,風力機的靜態運行點均處于穩定區域。但在穩定區域中,若風速下降(下降量為ΔVW)時,轉 速 會 下 降(下 降 量 為 Δω1)即dωm/dt<0,且有一個超調Δωos響應,風力機有可能進入不穩定區域。轉速的運動由Δω1和Δωos組成,如附錄D圖D1(b)所示。超調Δωos可以是正的,但應小于MPPT曲線和曲線L之間的間隙,以免風力機意外停機。
2.2.1基于傳遞函數的穩定約束條件
對于傳遞函數GP/V(s)、Gω/V(s)、GT/V(s),令s=jω,可 得 頻 域 下 的 頻 率 特 性GP/V(jω)、Gω/V(jω)、GT/V(jω)。接下來將基于傳遞函數的頻率特性分析穩定約束條件。
由于在風速大幅降低的情況下存在Δωos?Δω1,因此,對風力機穩定性的約束可由式(36)表示,即在MPPT的穩態運行狀態下,風速與轉速之比固定。

由式(22)和式(33)可得,改進MPPT控制及功率反饋控制下存在:

因此,若要有效地確保風力機的穩定和正常運行,需|Gω/V(jω)|≤1。同時,將GP/V(jω)、Gω/V(jω)和GT/V(jω)的超調量MP、Mω、MT定義為:
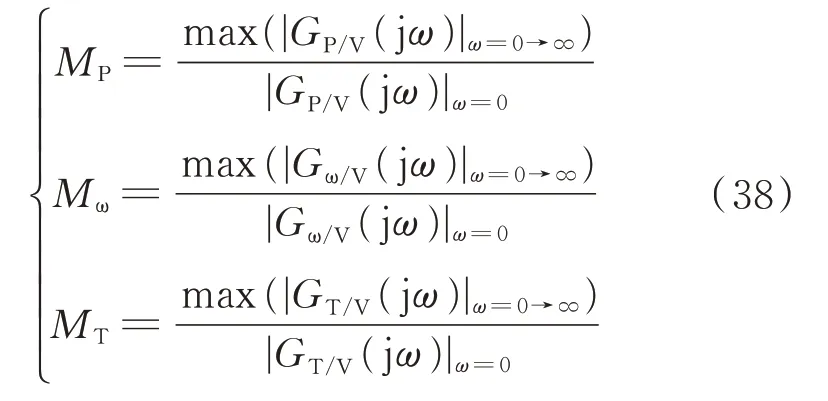
故對風力機穩定性的約束可表示為:

2.2.2基于特征根的穩定約束條件
由傳遞函數表達式(21)—式(24)可知,該改進MPPT控制下的特征根方程表示為:

由傳遞函數表達式(32)—式(35)可知,該功率反饋控制下的特征根方程可表示為:

特征根的位置可以反映穩定性,當所有特征根的實部均為負時,表明系統是穩定的。為保證系統穩定,同時增大振蕩阻尼、減少振蕩周期數,控制器參數的選取應使得特征根的實部全為負且盡可能保證實部絕對值較大、虛部絕對值較小[27]。
3 控制器的優化設計及穩定性驗證
3.1 控制器的優化參數設計
將式(21)—式(24)、式(32)—式(35)分別代入式(38)可得2種控制下各傳遞函數的最大幅度即超調 量MP、Mω、MT的 計 算 公 式。選 取 低、中、高(6 m/s、9 m/s、12 m/s)3組風速,分別繪制不同風速下各超調量隨控制器參數Kiω變化的關系曲線。根據曲線選取控制器的優化設計參數值或范圍,其中,時間常數Tmppt為1 s,風電系統的其他參數為:風力機 中,R=35 m,ρ=1.225 kg/m3,λopt=8.1,CP,opt=0.48,額 定 風 速VWN=12 m/s,額 定 功 率PN=2 MW;PMSG中,定子電阻為0.01Ω,電感為0.835 mH,J=128 500 kg·m2,ψf=8.76 Wb,極對數p=32。
3.1.1基于改進MPPT控制的參數設計
當滿足降階條件即Kpω=TmpptKiω時,超調量MP、Mω、MT隨控制器參數Kiω的變化關系如圖2所示,并取LPF的 時 間 常 數Tmppt=1 s。當Kiω減 小 時,帶 寬減小,而GP/V(jω)、Gω/V(jω)和GT/V(jω)的超調值具有不同的變化趨勢。基本上,GP/V(jω)、Gω/V(jω)的超調值將增加,而GT/V(jω)的超調值將減少。因此,當需要更平滑的輸出功率時,需要更窄的帶寬,但是同時將引入更大的轉速變化。

圖2 改進MPPT控制下超調量MP、Mω、MT與控制器參數的關系Fig.2 Relationship between overshoot MP、Mω、MT and controller parameters with improved MPPT control
由圖2的超調量關系曲線可以看出,Kiω取1 100左右是控制器參數在最佳取值區間的情況,此時獲得了較小的GP/V(s)帶寬,同時保證了較小的轉矩諧振(振幅不超過1.03 p.u.),但仍滿足風力機穩定運行的約束條件。位于Kiω=1 100左側區域的風力機是不穩定的,轉速超調量Mω>1;右側區域是穩定的,但是轉矩的諧振振幅隨著Kiω的增加而逐漸增大,故過大的Kiω也不是理想的控制器參數取值。因此,分別在過優設計、優化設計、欠優設計區間內選取3組參數,如表1所示。

表1 PI控制器參數Table 1 Parameters of PI controller
3.1.2基于功率反饋控制的參數設計
在減載率d=20%的功率反饋控制下的超調量隨控制器參數的變化關系如附錄E圖E1所示,并取控制器中Kpω與Kiω的倍數T=1。另外,根據附錄C式(C6)和式(C7)可知,由于傳遞函數表達式里與變化 參 數有關的 變量R中ωm0k1的值較大,故Kiω取 值稍大時R值近似為1,各傳遞函數幅值波動變化較小。對 應 于 附 錄E圖E1,當Kiω變 化 時,GP/V(jω)、Gω/V(jω)和GT/V(jω)的超調值幾乎保持不變。由圖E1可得出結論:在當前系統參數取值下,無論控制器參數Kiω如何取值,風力機都是運行在穩定區間的,且均有著較小的GP/V(jω)帶寬和較小的轉矩振蕩。
3.2 基于設計參數的穩定性驗證
3.2.1變控制器參數的根軌跡
由2.2.2節所得的傳遞函數的特征根方程式(40)和式(41)繪制2種控制策略下控制器參數Kiω分別在1 000~4 000和1~1 000范圍內變化時的根軌跡曲線及局部放大圖如圖3所示,灰色箭頭方向為Kiω增大時的根軌跡走向。
根據特征根軌跡曲線圖3(a)可看出,當風速分別為6、9、12 m/s(圖3(a)中從上到下的根軌跡對應的風速分別為6、9、12 m/s),Kiω在1 000~4 000范圍內變化時,根軌跡均位于坐標系左半平面,即所有特征根的實部均為負。因此可知控制器參數在該取值范圍內時風力機是穩定的,所得結論與2.2.1節風力機穩定約束條件一致,即在優化設計區間及欠優設計區間內選取的控制器參數是滿足穩定運行條件的。
同理,由根軌跡曲線及其局部放大圖(圖3(b))可知,當風速分別為6、9、12 m/s(圖3(b)中從上到下的根軌跡對應的風速分別為6、9、12 m/s),Kiω在1~1 000范圍內變化時,特征根均位于坐標系左半平面。因此,可知控制器參數在該取值范圍內時風力機是穩定的,所得結論與由附錄E圖E1得出的結論一致。
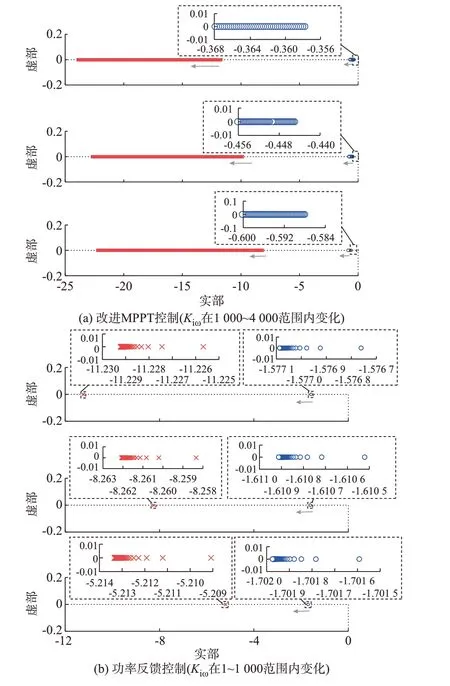
圖3 不同風速的變控制器參數根軌跡Fig.3 Root locus of variable controller parameterswith different wind speed
3.2.2基于控制器參數的Nyquist曲線及Bode圖
根據自動控制原理中Nyquist穩定判據可知,反饋控制系統穩定的充要條件是:Nyquist曲線逆時針包圍(-1,j0)點的次數等于系統開環右極點的個數。接下來將通過不同控制器參數下的Nyquist曲線和Bode圖即對數幅頻特性、對數相頻特性曲線來驗證2種控制下風力機運行的穩定性及優化設計參數選取的合理性。
改進MPPT控制中,3種控制器參數下系統的各傳遞函數Nyquist曲線和對數幅頻特性、對數相頻特性如圖4所示。
由圖4可以看出,在欠優設計和優化設計下,Gω/V(s)都沒有諧振,且滿足了Nyquist穩定判據,但欠優設計中GP/V(s)的帶寬要高于優化設計,且欠優設計中GT/V(s)存在一些很小的諧振。在過優設計中,雖然GT/V(s)幾乎不存在諧振,且GP/V(s)的帶寬小于優化設計,但其Gω/V(s)的諧振較大,與圖2所得結果一致。而優化設計下,GT/V(s)和Gω/V(s)幾乎不存在諧振,且GP/V(s)的帶寬較小。因此,可知在優化設計參數及欠優設計參數下,風力機均能處于穩定運行狀態,但優化參數下控制系統濾波的效果要優于欠優參數;而在過優設計參數下,控制系統雖然有著較好的濾波效果,但風力機不能穩定運行。
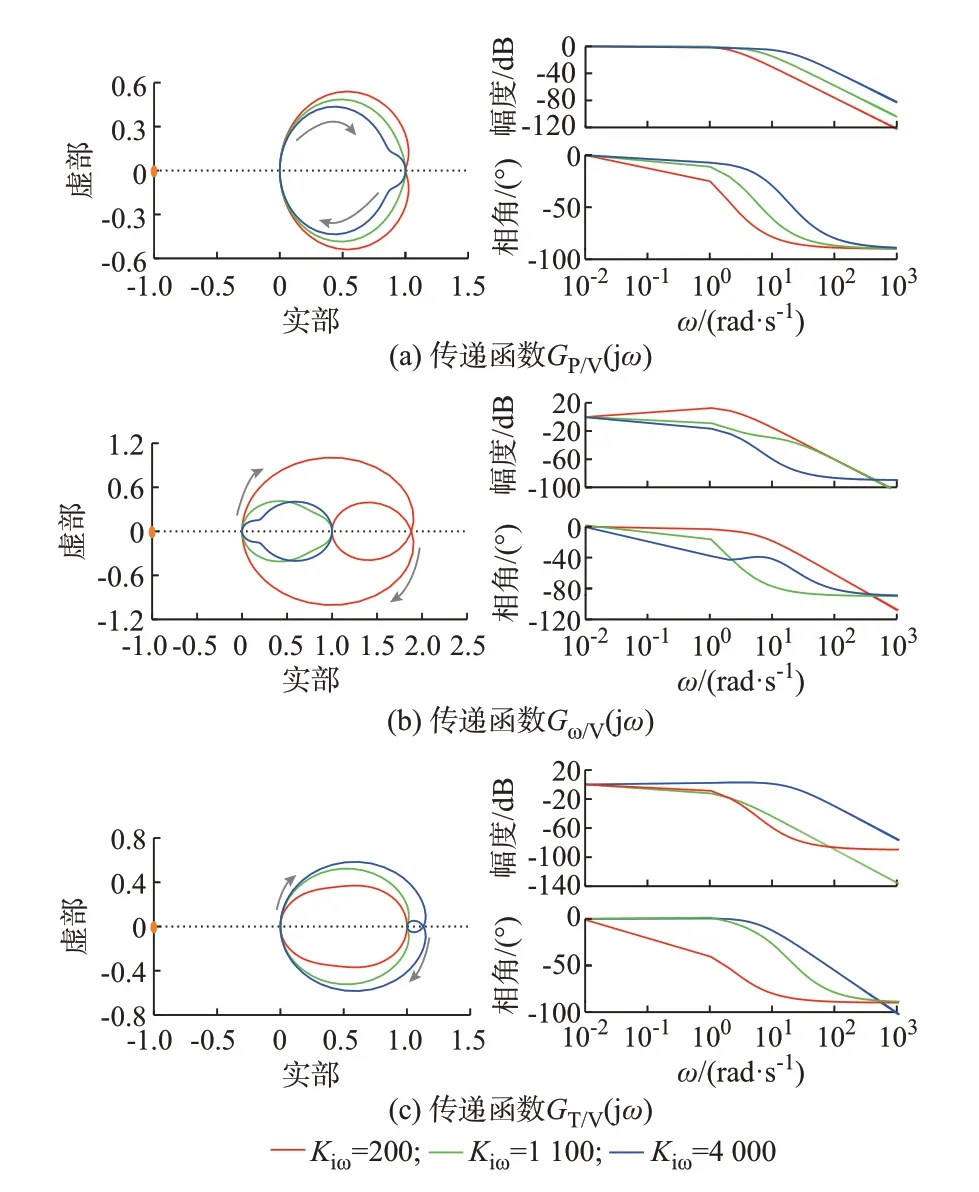
圖4 不同參數下各傳遞函數的Nyquist曲線及Bode圖Fig.4 Nyquist curves and Bode plots of various transfer functions with different parameters
基于前文提出的控制器參數優化方法,分別另選時間常數Tmppt為5 s和0.1 s,根據該參數下的傳遞函數超調量曲線,得出此時改進MPPT控制下優化設計的控制器參數。Tmppt取5 s時,控制器優化參數Kpω和Kiω分 別 取1 100和220;Tmppt取0.1 s時,控 制器 優 化 參 數Kpω和Kiω分 別 取770和7 700。接 下 來將分析不同濾波時間常數Tmppt對功率平滑效果的影響。控制器取優化參數時,3個傳遞函數GP/V(jω)、Gω/V(jω)和GT/V(jω)在不同時間常數下的對數幅頻特性曲線見附錄E圖E2。
由附錄E圖E2可看出,在優化設計參數的取值下,GP/V(jω)、Gω/V(jω)和GT/V(jω)的幅度值均在0以下。另外,隨著時間常數的降低,GP/V(jω)、Gω/V(jω)和GT/V(jω)的帶寬會有所減小,但變化并不大,且功率與風速間的傳遞函數GP/V(jω)的帶寬幾乎是沒有變化的,說明濾波時間常數的改變對功率平滑效果的影響較小。
在減載率d=20%的功率反饋控制中,基于3.1.2節的分析可知,不同控制器參數下各傳遞函數的頻率特性幾乎相同。故僅考慮控制器參數Kiω=100下3個傳遞函數的Nyquist曲線、對數幅頻特性和對數相頻特性曲線,見附錄E圖E3。由圖E3可以看出,在該控制器參數下,GP/V(jω)、Gω/V(jω)和GT/V(jω)幾乎都沒有諧振,且滿足Nyquist穩定判據,與圖E1和圖3(b)所得結果一致。
4 仿真驗證
在MATLAB/Simulink中建立了永磁同步風電系統仿真模型,驗證第3章所提出的基于功率平滑的控制器優化參數設計方法的有效性和可行性。風力機和PMSG的參數同3.1節,轉動慣量是風力機和PMSG兩者的總和。直流側參考電壓設為2 000 V,無功功率參考值設為0。
4.1 改進MPPT控制策略下的仿真
4.1.1滿足傳遞函數降階條件時的仿真
基于改進MPPT控制策略,當Tmppt=1 s、Kpω=TmpptKiω且其余仿真參數相同時,分別對比了過優設計、優化設計、欠優設計3種不同水平的控制器參數下輸出功率跟蹤及平滑的效果。仿真所得的風力機輸出功率如圖5所示。控制器參數取值依次為200、1 100、4 000。優化設計、欠優設計下輸出功率對比及局部放大圖見圖5(d)。Kiω取200、1 100、4 000時的轉速和電磁轉矩變化波形見附錄F圖F1。
由圖5可看出,在過優設計的控制器參數下,雖然風力發電機能很好且快速地跟蹤上最大功率點,并且具有一定的平滑效果,但在仿真進行到12 s左右時,風力機會失去穩定。在優化設計的控制器參數下,風力發電機能跟蹤最大功率點,且隨著仿真的進行風力機也不會失穩。同樣地,在欠優設計的控制器參數下,風力發電機也可以跟蹤最大功率點,且風力機也不會失穩。但由圖5(d)可知,與優化設計參數下的結果相比,欠優設計下的平滑效果要稍差于前者,且效率也略低。綜合來看,優化設計參數的選取可使風力機在保證穩定運行的同時,達到較好的功率跟蹤、平滑效果。
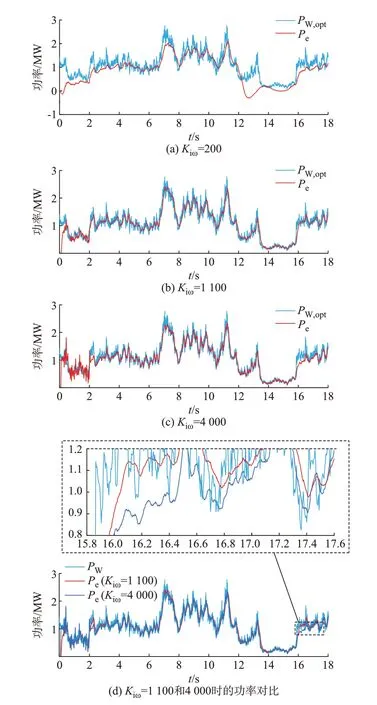
圖5 改進MPPT控制下不同Kiω取值的輸出功率波形Fig.5 Output power waveforms with different values of Kiωand improved MPPT control
由附錄F圖F1的轉速波形可看出,在優化和欠優設計的控制器參數下,實際轉速值可較好地跟蹤參考轉速,且優化設計下跟蹤效果更好;而在過優設計下,實際轉速波動較大,且仿真在12 s左右時實際轉速由30 r/min跌落至-30 r/min,風力機失去穩定。
4.1.2不滿足傳遞函數降階條件時的仿真
當Kpω=TPIKiω時,超 調 量MP、Mω、MT隨 控 制器 參 數Kiω的 變 化 關 系 如 附 錄F圖F2所 示,并 取LPF的 時 間常數Tmppt=5 s,TPI=1。由圖F2可 看出,Kiω取2 000左右是控制器參數值在最佳取值區間的情況,此時轉矩的諧振相對較大(小于1.3 p.u.),GP/V(jω)的諧振和帶寬均較小(振幅約1.03 p.u.),轉速超調值小于1,仍滿足風力發電機穩定運行的約束條件。故而在優化設計區間內取控制器參數Kpω=Kiω=2 000。
基于改進MPPT控制策略,在其余仿真參數相同時,對比過優設計(Kiω=100)、優化設計(Kiω=2 000)、欠優設計(Kiω=5 600)這3種不同控制器參數下輸出功率跟蹤及平滑的效果,如附錄F圖F3所示。由圖F3可以看出,在Kiω=2 000時的輸出功率的平滑效果較好;實際轉速能很好地跟蹤參考轉速并保持穩定,電磁轉矩的波動也在可接受范圍內。
4.2 功率反饋控制策略下的仿真
基于功率反饋控制策略,結合優化參數設計的分析,在其余仿真參數相同時,首先分析了沒有減載即風力機運行在MPPT狀態以及減載率為20%、50%時的輸出功率,如附錄F圖F4所示。然后,對于減載20%的功率反饋控制做了進一步仿真,比較了控制器參數取值依次為1、10、100、1 000這4種不同情況下的輸出功率跟蹤及平滑的效果。仿真所得的風力發電機輸出功率如圖F5所示。Kiω=100時,未減載和減載20%、50%下的轉速和電磁轉矩變化波形如圖F6所示。
由附錄F圖F4可以看出,在風力機減載運行后,反饋控制輸出的功率值會隨著減載率的變化而變化。由圖F6可以看出,隨著減載率的提高,實際轉速值會相對提高,電磁轉矩值會相對降低。由圖F5可以看出,減載20%時,在這4種控制器的設計參數下,風力機都沒有失穩且都能很好地快速跟蹤最大功率,3.1.2節所研究分析的結論得以驗證。
5 結語
本文建立從風速到輸出功率、電磁轉矩和轉速的傳遞函數,在此基礎上合理設計了風力發電機的2種控制策略——改進MPPT控制及功率反饋控制下用于功率平滑的控制器的參數優化取值。此外,分析了風力機基于傳遞函數和特征根方程的穩定運行約束條件,并通過研究控制器參數變化下的根軌跡曲線,驗證了在該優化參數下風力機的運行是穩定的;通過研究不同設計水平控制器參數下的Nyquist曲線和Bode圖,驗證了優化參數下風力發電機功率跟蹤和平滑效果較好。控制參數設計下的系統穩定性在仿真中得到了進一步的驗證,優化設計區間內的參數可使風力發電機更好地追蹤功率,且在使功率和轉矩更加平滑的同時,風力機仍能處于穩定運行區域內。
本文在進行參數優化設計及驗證時,只研究了基于滯環矢量控制的傳遞函數和單個控制器參數的設計,沒有進一步研究基于空間矢量脈寬調制(SVPWM)的多個控制參數的優化。因此,下一步研究應考慮推導SVPWM下風力發電機控制策略的頻域傳遞函數,并分析風力機運行穩定條件,研究多個控制器間的相互影響,對多控制參數進行合理的優化設計。
附錄見本刊網絡版(http://www.aeps-info.com/aeps/ch/index.aspx),掃英文摘要后二維碼可以閱讀網絡全文。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電網與清潔能源(2015年3期)2015-02-28 16:03:31
